一种用于民机全发失效迫降的辅助驾驶系统和方法
文献发布时间:2023-06-19 10:16:30
技术领域
本发明涉及一种飞机辅助驾驶的方法,更具体地说,是一种民机发生全发失效后,辅助民机飞行员选取着陆场地、规划返航轨迹、提示控制策略和指令,并安全降落到选定着陆点的系统和方法。
背景技术
发动机失效,是指飞机在执行飞行任务时,由于机械故障、电子系统故障等原因引起的发动机停止工作、无法产生动力的状态。现代民机的无动力飞行存在有“四缺”的困难:缺动力、缺信息、缺时间、缺迫降场地。发动机失效后,飞机在气动阻力作用下将快速减速,使飞机的留空时间缩短;另一方面,此时提供能源的应急动力系统的供应时间是一定的,留给飞行员迫降着陆的时间非常有限。因此当发动机发生空中停车且无法重启时,需要尽快选择迫降场地并制定迫降航线,继而操纵飞机应急迫降。
制定返航航线时应争取获得最大的下滑距离以及尽量减少高度损失。由于发动机空中停车是随机的,飞机无动力飞行的初始高度和速度具有不确定性,当飞机距离跑道较近时,能量可能会过高,当距离跑道较远时,能量会相对不足,因此需在满足场地可达性和着陆安全性的前提下对飞机的能量进行管理,如采用S转弯、盘旋下降的策略消耗多余的能量,调整飞机到合适的能量状态,以满足安全迫降着陆的条件。
目前有人驾驶飞机在发动机空中停车后,一般依赖于飞行员和空管人员的个人经验进行应急着陆场的选择及下滑操纵,全发失效迫降的成功与否受飞行员的心理素质和驾驶技能的影响很大,迫切需要自动化的设计方法为飞行员实时提供辅助决策支持。如果能够通过飞机高度和速度自动筛选迫降场地,然后对返航迫降航迹进行实时规划,并将控制策略和需要控制的参数指令实时提供给飞行员,辅助飞行员完成整个无动力应急着陆过程,则可以使飞机以合适的能量和飞行姿态接近着陆场地,保证民机飞行安全,提升全发失效迫降的成功率。
发明内容
本发明的目的是在民机发生全发失效后,自动筛选应急着陆场地、根据选取的着陆点自主规划返航航迹、实时生成控制策略,从而辅助飞行员决策,安全完成返航迫降着陆任务,提高全发失效迫降的成功率。
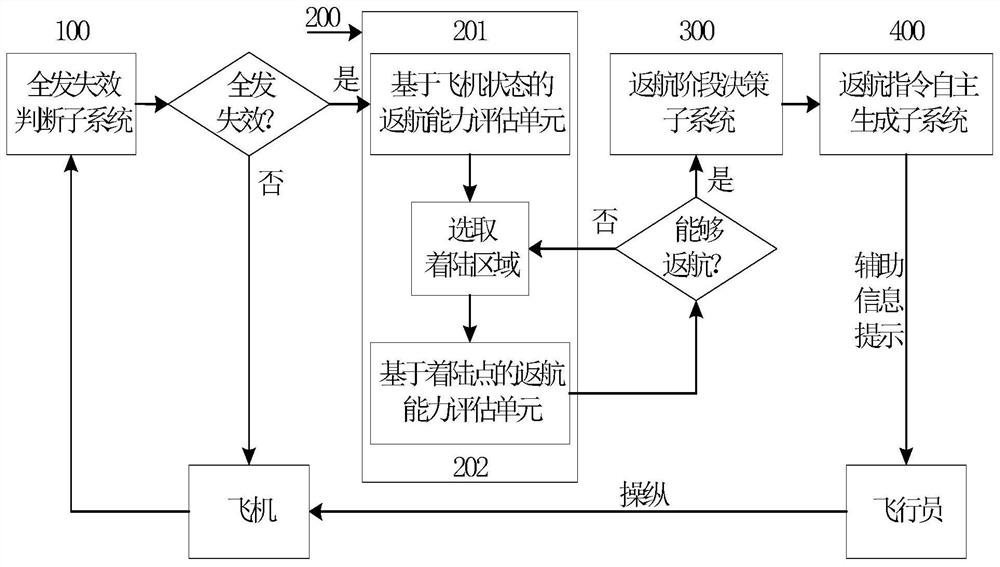
为此目的,本发明的一种用于民机全发失效迫降的辅助驾驶系统,该系统包括了全发失效判断子系统(100)、返航能力评估子系统(200)、返航阶段决策子系统(300)、返航指令自主生成子系统(400)。所述返航能力评估子系统(200)包括基于飞机状态的返航能力评估单元(201)和基于着陆点的返航能力评估单元(202)。所述方法显著特点在于以自动和重复的方式实施下述一系列连续步骤:
步骤一:全发失效判断子系统(100)根据飞机油门位置、发动机实际转速、航迹倾角,判断飞机是否发生全发失效,处于无动力滑行阶段;
步骤二:返航能力评估子系统(200)中的基于飞机状态的返航能力评估单元(201),根据飞机的实时高度和速度,评估飞机保持无动力滑行状态,能够达到的最远距离;再以飞机当前位置为圆心、最远距离为半径,得到一个飞机可以到达的圆形区域;圆形区域内的机场或迫降场地,均可作为备选的着陆区域提供给飞行员;
步骤三:飞行员在备选的着陆区域中选取一个作为着陆点,并通过机载交互界面输入到基于着陆点的返航能力评估单元(202)中;
步骤四:基于着陆点的返航能力评估单元(202)以着陆点为坐标原点,建立返航坐标系,并根据飞机方位自主规划飞机的返航航迹;并根据规划的返航航迹重新评估飞机的剩余能量是否能够返航。若能够返航,则将规划的返航航迹输入到返航阶段决策子系统(300)中;若不能返航,则取消该着陆区域的备选资格,重复步骤三;
步骤五:返航阶段决策子系统(300)根据飞机相对着陆点的位置和方向,实时判断飞机当前所处的返航阶段。返航阶段一般包含三个,分别是:航向调整段、盘旋下降段和进场着陆段。其中,航向调整段分为转弯和接近二个子阶段;进场着陆段分为浅下滑、陡下滑和拉平段三个子阶段;
步骤六:返航阶段决策子系统(300)将飞机所处阶段的逻辑值,输入到返航指令自主生成子系统(400)中,根据各阶段对应的控制策略,告知飞行员需要控制的飞机状态量;再根据飞机的位置或速度,实时解算状态量指令,并告知飞行员;
步骤七:飞行员操纵飞机跟踪状态量指令,即可完成无动力应急迫降任务。
本发明的优点在于:
①本发明的一种用于民机全发失效迫降的辅助驾驶系统能够在民机意外发生全部发动机失效的情况下,自动评估飞机的返航能力,并筛选出可行的着陆区域,给飞行员提供辅助决策信息;
②本发明的一种用于民机全发失效迫降的辅助驾驶系统可以自主生成返航航迹,即预测飞机的返航轨迹,便于地面塔台指挥其他飞行器进行避让。
③本发明的一种用于民机全发失效迫降的辅助驾驶系统可以实时判断飞机所处的飞行阶段,进而生成控制策略和目标状态,并提供给飞行员,辅助飞行员完成返航过程中精确航迹跟踪任务,对于减小损失、安全迫降具有重要意义。
④本发明的一种用于民机全发失效迫降的辅助驾驶系统只向飞行员提供控制策略,而不直接参与飞机控制,符合我国2018年发布的《中华人民共和国民用航空法》中规定“机长享有最终决定权”的基本原则,保证了飞行安全。
附图说明
图1为本发明所述一种用于民机全发失效迫降的辅助驾驶系统结构框图。
图2为本发明所述基于飞机状态的返航能力评估原理的示意图。
图3为本发明所述最长下滑距离优化参数的计算流程示意图。
图4为本发明所述最长下滑距离数字虚拟飞行的人机闭环模型结构框图。
图5为本发明所述基于着陆点的返航能力评估原理的示意图。
图6为本发明所述返航阶段的示意图。
图7为本发明所述实施例1的无动力返航三维航迹规划图。
图8为本发明所述实施例1的无动力返航的运动参数时间历程曲线。
具体实施方式
下面将结合附图和实施例对本发明做进一步的详细说明。
如图1所示,本发明的一种用于民机全发失效迫降的辅助驾驶系统,该系统包括全发失效判断子系统100、返航能力评估子系统200、返航阶段决策子系统300、返航指令自主生成子系统400。
全发失效判断子系统100
在全发失效判断子系统100中,本发明的一种用于民机全发失效迫降的辅助驾驶系统根据飞机实时的油门位置、发动机实际转速、航迹倾角等信息,对是否发生全发失效进行判断,其判别式可以表示为:
E
γ为飞机航迹角;
γ
kk
全发失效后,公式(1)可以解释为:飞机下滑角超过阈值;全部发动机实际转速N下降,小于kk
返航能力评估子系统200
本发明中,返航能力评估子系统(200)包括基于飞机状态的返航能力评估单元(201)和基于着陆点的返航能力评估单元(202)。
基于飞机状态的返航能力评估单元201
基于飞机状态的返航能力评估单元(201),根据飞机的离地高度和速度,评估飞机保持无动力滑行状态,能够达到的最远距离,记为最远可达距离R
本发明中,最远可达距离R
步骤A:基于分段优化的方法计算,在指定高度下使飞机获得最长下滑距离的状态参数,包括飞行速度、航迹角等。如图3所示,具体计算步骤为:
(A)确定高度从H
高度的分割方法会直接影响最长下滑距离的精确性:分割得越精细,计算结果越精确;但过于精细会严重影响计算效率。本发明中高度分割步长的基本原则为:在高空,飞机的升阻特性和速度随高度变化较剧烈,可选择较小的分割步长;在低空,飞机的升阻特性和速度随高度变化缓慢,可选择较大的分割步长。根据高度步长ΔH,可将H
{H
H
H
k代表高度序列的编号;
ΔH为高度步长。
(B)飞行速度的初步搜索
高度越高,最大升阻比K
{Ma
Ma
i代表初步搜索的马赫数序列的编号。
对每个高度H
K
K
K
计算得到Ma
(C)飞行速度的精确搜索
以初步最优下滑马赫数Ma
①当K
j代表精确搜索的马赫数序列的编号;
Ma
分别计算以
②当K
与情况①方法相同,分别计算以
③当K
(D)最优下滑参数的确定
计算得到
Ma
α
δ
γ
V
K
特别地,随着高度降低,最优下滑速度V
最终,得到了不同高度H
步骤B:采用基于数字虚拟飞行的仿真方法,根据分段优化的状态参数,对无动力下滑过程进行数值仿真计算,从而得到飞机最远可达距离R
(A)建立人机闭环仿真模型
通过建立飞机动力学模型、数字驾驶员操纵模型,可以构建最长下滑距离数字虚拟飞行仿真系统,如图4所示。图4中数字驾驶员通过控制速度,实现最长下滑距离的飞行任务。
V
θ为飞机俯仰角;
γ为飞机航迹角;
Y
Y
Y
δ为解算的飞机升降舵偏转指令。
(B)数值仿真计算最远滑行距离X
飞机初始高度为H
(C)计算最远可达距离R
根据飞机实时高度和速度,可以得到飞机的最远可达距离R
R
H
X
h为飞机实时海拔高度;
V为飞机实时空速;
V
g为重力加速度;
ε为能量转换效率,若V<V
基于着陆点的返航能力评估单元202
受到返航着陆机场的地形高度、返航机场跑道方向等因素影响,返航航迹一般为曲线,而不是飞机当前位置和着陆点之间的最短距离。因此,根据最远可达距离R
返航航迹的规划步骤为:
步骤一:基于着陆点,建立返航坐标系。
设返航坐标系的原点O位于着陆点,x轴指向跑道进场方向,z轴垂直地面向上,y轴垂直于进场方向,符合右手定则。
如图5所示,已知在A处识别出飞机全发失效,坐标为(x
步骤二:计算返航轨迹
如图5所示,返航航迹由A、B、C、D、O等五个关键点组成。其中,AB和CD为圆弧,其半径分别为R
(A)计算O
O
x
χ为飞机在返航坐标系中的实时航向角;
x
R
联立公式(10)中的方程组,求解得到:
x
χ为飞机在返航坐标系中的实时航向角;
x
R
(B)计算线段BC的长度
设R
x
x
R
(C)计算圆弧AB和CD的长度
设R
R
χ为飞机在返航坐标系中的实时航向角。
(D)则返航轨迹的水平距离X
R
χ为飞机在返航坐标系中的实时航向角。
x
x
步骤三:评估返航能力
E
H
H
X
X
X
返航阶段决策子系统300
返航阶段决策子系统(300)根据飞机相对着陆点的位置和方向,实时判断飞机当前所处的返航阶段。返航阶段一般包含三个大阶段,可以再细分为六个下阶段,如图6所示,下面按照时间顺序介绍其决策逻辑:
(A)航向调整段——转弯:
该阶段对应图6中的
(B)航向调整段——接近:
该阶段对应图6中的直线段BC,为飞机沿盘旋圆柱切线接近盘旋圆柱的过程。该线段的方向角为λ,计算公式为:
λ为直线段BC的方向角;
x
R
x
转弯阶段结束后立即进入该阶段,进入的标志为E
E
E
χ为飞机在返航坐标系中的实时航向角;
λ为直线段BC的方向角。
(C)盘旋下降段:
该阶段对应图6中的
E
E
E
x和y代表飞机在返航坐标系中的实时坐标;
x
x
R
(D)进场着陆段——浅下滑:
该阶段对应图6中的直线段EF,为飞机沿跑道进场方向,以最小下滑角下滑的阶段。盘旋下降段结束后,立即进入该阶段。其开始的标志为飞机朝向进场方向,且飞机高度进入图6的中部白色区域代表的终止盘旋区域,逻辑值E
E
E
E
E
χ为飞机在返航坐标系中的实时航向角;
h
H
(E)进场着陆段——陡下滑:
该阶段对应图6中的直线段FG,为飞机沿跑道进场方向,以最大下滑角下滑的阶段。浅下滑阶段结束后,立即进入该阶段。其开始的标志为飞机航迹穿越图6中下滑道上边界,逻辑值E
E
E
E
E
E
h
x和y代表飞机在返航坐标系中的实时坐标;
γ
(F)进场着陆段——拉平:
该阶段对应图6中的圆弧
E
E
E
E
E
E
h
H
返航指令自主生成子系统400
返航指令自主生成子系统(400)根据六个逻辑值E
表1各阶段控制策略和指令
表1中陡下滑阶段的高度指令h
h
h
x和y代表飞机在返航坐标系中的实时坐标;
γ
表1中φ
表1中航向调整段的侧向偏差
λ为直线段BC的方向角;
x和y代表飞机在返航坐标系中的实时坐标;
x
R
x
表1中进场着陆段的侧向偏差
x和y代表飞机在返航坐标系中的实时坐标。
实施例1
利用本发明完成一次飞机发动机全发失效后的迫降任务。飞机初始海拔高度为2400m,速度为130m/s,飞机航迹偏角为56°;目标机场海拔高度为370m,跑道进场方向角为14°;飞机初始位置距离目标着陆点的水平相对距离为23.5km。地面模拟器飞行试验开始7s后,关闭全部发动机,模拟全发失效。仿真结果如图7和图8所示。
试验开始7s后,发生全发失效,飞机进入无动力滑翔阶段。7.2s时辅助系统中全发失效判断子系统(100)识别出飞机全发失效,逻辑值E
根据飞机的当前方位和着陆点位置,返航能力评估子系统(200)完成返航航迹规划,如图7所示。由于此时飞机能量高度H
在t=7~150s之间,飞机处于航向调整段。驾驶员操纵驾驶杆跟踪速度指令,速度指令可根据飞机高度对应的最优速度V
在t=150~200s之间,飞机处于下降盘旋段,逻辑值E
在t=200~400s之间,飞机处于进场着陆段。由图8可见,由于飞机高度低于下滑道上边界,首先进入浅下滑阶段,逻辑值E
由图8可知,飞机着陆速度为75m/s,下沉率为-1.73m/s,在预定着陆点后30m着陆,满足飞机的着陆性能要求。因此,建立的辅助驾驶系统和方法,对飞机全发失效可以正确识别、对飞机针对目标机场的返航能力判断正确,并且提供的辅助驾驶策略和指令适当,可以辅助飞行员返航。
- 一种用于民机全发失效迫降的辅助驾驶系统和方法
- 一种用于民机全发失效迫降的辅助驾驶系统和方法