自动横向应变伸长计架构
文献发布时间:2023-06-19 10:19:37
本申请是申请日为2015年6月28日、国际申请号为PCT/US2015/038202、国家申请号为201580039092.7、发明名称为“自动横向应变伸长计架构”的发明专利申请的分案申请。
本公开的背景
本申请依据35U.S.C.119(e)主张2014年8月7日递交的美国临时申请第62/034,243号的优先权,所述临时申请的内容在此全部以引用的方式且出于所有目的而并入本申请。
技术领域
本公开涉及一种用于在材料测试中的具有被动垂直系统的应变伸长计,所述被动垂直系统使用线性光学编码器。
背景技术
应变伸长计是一种仪器,其准确地测量测试样本在施加的负荷下的尺寸改变以便更好地捕获样本的材料性质。最常见类型的应变伸长计测量轴向应变,其表示当在负荷下拉伸样本时样本长度的改变。这是通过追踪沿着样本长度始于精确初始间隔或标距的两个点来进行的。那两个点之间的初始与最终间隔之间的百分比差为轴向应变。
另外,存在通常结合轴向应变伸长计工作的横向应变伸长计。当测试样本轴向拉伸时,横向应变伸长计追踪其侧向边缘。在材料测试期间,样本的横截面积将在拉伸负荷下变得更小。这种宽度或直径的改变为应变伸长计测得的横向应变。横向应变伸长计的准确度要求由测试标准决定,且可严苛得为需要一微米(微米或美光)的一半的准确度(0.5μm)。在正由轴向应变伸长计追踪的轴向标距点之间的中点处测量横向应变。
如同轴向应变伸长计那样,存在接触式和非接触式横向应变伸长计。接触式应变伸长计在测试期间用两个臂物理追踪样本边缘,而非接触式应变伸长计通常依赖于成像来追踪样本的尺寸改变。
对于自动接触式应变伸长计,通常需要将接触臂附接到样本和从测试样本移除接触臂。使用足够复杂以提供所需要的准确度的测量系统通常也是必要的。
仪器通常被设计以达到作为完整系统的必要准确度。
横向应变伸长计与轴向应变伸长计一起操作,且其接触点通常必须保持在两个轴向接触点的中点。难题在于,轴向点都在测试样本的移动端的方向上移动,且精确的垂直位置是未知的。因此,装置通常必须从来自轴向应变伸长计的数据计算垂直位置,且将其驱动到那里,或者附接到样本,且让样本在其拉伸时携带该装置。如果不这么做,那么应变伸长计将相对于样本滑动,从而导致错误的数据。
重要的是,要注意,标本实际上必须不受来自应变伸长计的作用于样本的任何外部负荷影响,以使从测试得到的材料性质数据在统计上不受影响。这种要求通常适用于任一种类的应变伸长计。虽然受大负荷作用的较大样本可基本上不受应变伸长计(例如,轻型手动夹持式应变伸长计的质量)影响,但经受较小负荷作用的较小样本将在测试期间记录此外部力且产生不良数据。
结果,驱动系统常使用复杂的机构和敏感的传感器,它们确保准确的垂直位置且防止不想要的外部负荷。较简单且优选的方法是,使用仔细平衡、低摩擦、被动追踪系统,其中样本运动使得应变伸长计移动。倘若给定横向应变伸长计测量单元的典型尺寸,那么这可能是有难度的。
倘若给定装置的测量准确度和自动化要求,那么使测量单元位置尽可能靠近样本设置,否则,必须对设计尽较大的努力来确保从样本到测量系统的测量的可信追踪。
准确度要求经常可能非常严格,且正因为此,过去已使用高度敏感性技术。感应传感器、应变仪和磁尺是所使用的技术中的一些。然而,这些技术是以有限的测量范围(通常大约仅数毫米)为代价的。在许多情况下,分辨率也不足以达到严苛的准确度要求。此外,它们的封装容易形成大且重的单元,再加上使必要的运动自动化所需的致动器,使设计方向朝向之前提到的用于垂直定位和追踪的被驱动架构。
为了满足对于自动运动的要求,应变伸长计必须进行某些截然不同的运动:(1)垂直移动到所要的位置,(2)将接触臂附接到样本边缘上/从样本边缘移除接触臂,且最有可能(3)移进与移出测试区域,以便不干扰测试样本的装载和去除,虽然理论上可避免这样的运动或使该运动与另一运动相结合。
当前自动化的、接触式应变伸长计包括Zwick的multiXtens横向应变伸长计和MF的MFQ-A。现有技术应变伸长计包括本申请的受让人的HRDE。所有这些装置使用被驱动的垂直系统和测量系统(具有有限范围)。图1到图4示出各种现有技术应变伸长计1000。
发明内容
公开的实施例为一种用使用线性光学编码器的被动垂直系统测量横向应变的应变伸长计。将第一和第二传感器臂安装于相应的第一和第二车架上,所述第一和第二车架在相应的第一和第二线性轨道上横越。应变伸长计使用低摩擦设计来使第一和第二传感器臂的移动的滚动摩擦最小化。第一车架包括直接面向第二车架上的编码器标尺的编码器读取头。在此配置中,可读取两个车架和因此两个传感器臂的准确相对位置。
附图简述
从以下描述和从附图,本公开的进一步的目的和优势将变得显而易见,在附图中:
图1为第一现有技术横向应变伸长计的立体图。
图2和图3为第二现有技术横向应变伸长计的立体图。
图4为第三现有技术横向应变伸长计的立体图。
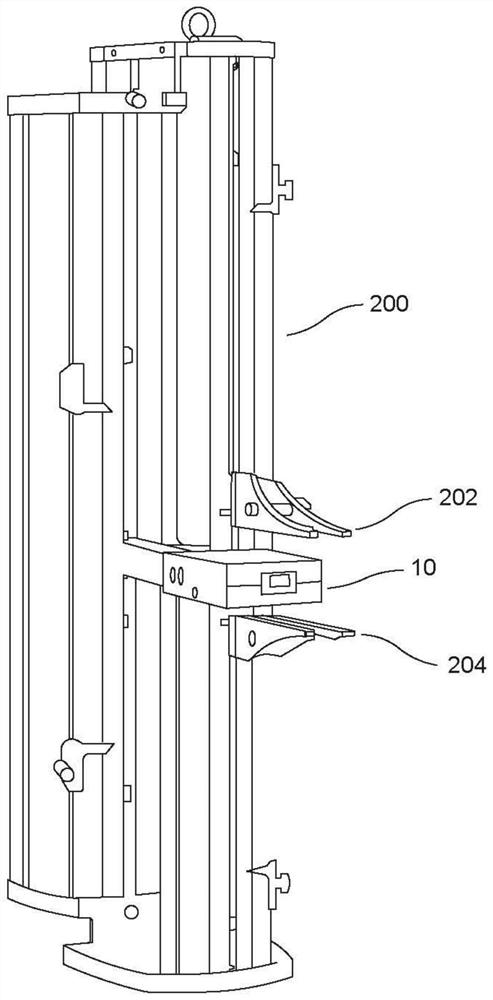
图5为结合轴向应变伸长计展示的本公开的横向应变伸长计的立体图。
图6为在测试位置中展示的从外壳伸出的本公开的横向应变测量单元的立体图。
图7为展示其中防尘罩被去除的本公开的横向应变测量单元的立体图。
图8为展示本公开的横向应变测量单元的立体图,其中壁被表示为透明的。
图9为展示其中壁被去除的本公开的横向应变测量单元的正视图。
图10为本公开的横向应变测量单元的立体图。
图11为本公开的横向应变测量单元的侧视图。
图12为本公开的横向应变测量单元的另一实施例的立体图。
图13为本公开的横向应变测量单元的另一实施例的正视图。
具体实施方式
现在详细参看附图,其中贯穿若干视图,相似附图标记指示相似元件,我们看出,图5示出本公开的横向应变测量单元(TSMU)10结合轴向应变伸长计200使用,且图6到图11为横向应变测量单元(TSMU)10的视图。
图5示出一种布置,其中轴向应变伸长计200响应于由材料测试机(未展示)给予的轴向或拉伸负荷而测量样本(未展示)上的轴向应变。材料测试机通常被布置以在样本上施加负荷,所述负荷将样本的相对轴向端彼此相反地牵拉。这种负荷导致样本上的轴向应力,这又引发样本的轴向应变或轴向变形,如通过轴向应变伸长计200的第一臂202和第二臂204测得的。这种轴向应变同样地通常进一步造成样本的横向尺寸的减小或变薄,其可被表征为在材料测试机将负载施加于样本的同时由横向应变测量单元10测得的横向应力。
本公开的横向应变测量单元10包括金属壳体12,所述金属壳体12具有前壁14、后壁16、第一侧壁18和第二侧壁20、通常充当用于TSMU 10的内部结构的底部的底壁22、以及顶壁24。第一传感器臂30和第二传感器臂32从第一侧壁18中的槽33水平地伸出。注意,在图5中,第二侧壁20、前壁14和顶壁24是可见的。第一传感器臂30和第二传感器臂32向右伸出且稍微伸出到所示出的配置的后部,以便在轴向应变伸长计200的第一臂202与第二臂204之间的空间内。第一传感器臂30和第二传感器臂32的远端包括相应的第一和第二对向刀34、36,用于接触测试中的样本。防尘罩37与覆盖外壁的壳一起被示出于图6中。防尘罩37包括槽39,第一传感器臂30和第二传感器臂32通过所述槽39伸出。
注意,第一对向刀34和第二对向刀36优选地由钛制成。钛作为接触金属具有以下优势:其热导率为碳钢的热导率的大致八分之一和不锈钢或工具钢的热导率的大致四分之一。在此实施例中,这是有利的,因为刀34、36中的钛的使用在材料测试期间将远离接触点的热传导减小。这是意义重大的,因为应力测试常常对测试样本进行加热。热传导可冷却且因此强化在接触点的样本,由此改变故障的位置和最大热应力的位置。钛的使用可望解决且减少这种关注问题。
如在图9中最清楚地看出的,下部线性滑轨40的第一固定轨道被紧固到底壁22的内部,而上部线性滑轨42的第二固定轨道被紧固到顶壁24的内部,其中顶壁24与底壁22相对。下部线性滑轨40和上部线性滑轨42充当固定轨道,相应的下部车架44和上部车架46在所述固定轨道上线性地横越。第一传感器臂30附接或紧固到下部车架44。同样地,第二传感器臂32附接或紧固到上部车架46。
如在图10和图11中最清楚地看出的,第一轮58和第二轮60带轴颈以围绕实质上平行于第一传感器臂30和第二传感器臂32的轴线旋转。第一轮58配置有机动化的驱动轴杆59,而第二轮60配置为惰轮。使正时输送带62配合在围绕第一轮58和第二轮60的环路中,以便包括下部输送带区62A(正时输送带62的在第一轮58与第二惰轮60的最下部部分之间伸展的部分)和上部输送带区62B(正时输送带62的在第一轮58与第二惰轮60的最下部部分之间伸展的部分)。如在图9中最清楚地看出的,将下部驱动托架64附接到正时输送带62在下部输送带区上的某一位置。类似地,将上部驱动托架66附接到正时输送带62在上部输送带区62B上的某一位置。在这种配置中,下部驱动托架64和上部驱动托架66可通过正时输送带62围绕第一轮58和第二滚轮60的部分旋转行程被驱动以推动或推压下部车架44和上部车架46,以便使第一传感器臂30与第二传感器臂32分开。下部驱动托架64和上部驱动托架66在相反的方向上移动相等的距离,因此当下部驱动托架64和上部驱动托架66正推动或推压下部车架44和上部车架46时,下部车架44和上部车架46在相反的方向上移动相等的距离,且第一传感器臂30与第二传感器臂32通过在相反的方向上移动相等的距离而彼此分开。
如在图11中最清楚地看出的,第一托架安装的弹簧锚定物68和第二托架安装的弹簧锚定物70邻近相应的第一轮58和第二轮60地附接到底壁22。第一盘簧72具有附接到第一托架安装的弹簧锚定物68的向外端74和附接到下部车架44的中央区域76,而第二盘簧78具有附接到第二托架安装的弹簧锚定物70的向外端80和附接到上部车架46的中央区域82。第一盘簧72和第二盘簧78的力在相反的方向上推动下部车架44和上部车架46,以便使第一传感器臂30与第二传感器臂32合在一起。如上所叙述的,第一传感器臂30与第二传感器臂32通过下部驱动托架44和上部驱动托架46响应于正时输送带62的行进而推动或推压相应的下部车架64和上部车架66(由此反作用于第一盘簧72和第二盘簧78的力)的力相互分开。
编码器标尺88定位于下部车架44的上部面上。垂直地紧邻在编码器标尺88上方,编码器读取头90被定位于上部车架46的下表面上。在此配置中,编码器标尺68向下紧邻于邻近对置的编码器读取头90。当下部车架44和上部车架46沿着相应的下部线性滑轨40和上部线性滑轨42在相反的方向上水平移动时,由此造成第一传感器臂30与第二传感器臂32的位置的相等平移时,编码器读取头90读取编码器标尺88以产生数据以确定下部车架44与上部车架46的相对位置,由此确定第一、第二对向刀34、36之间的距离,由此确定测试中的样本的宽度,且提供用于侧向或横向应变计算的数据。将来自编码器读取头90的数据发送到通常包括微处理器的处理器板92,所述处理器板92可执行初步计算且提供外部端口以传送数据供进一步处理。
公开的实施例的设备由此使用低摩擦设计来使传感器臂30、32的移动中的滚动摩擦最小化。由于测量系统的小尺寸以及出自横向应变测量单元(TSMU)10的电导体的最小尺寸、数目和质量,这种方法是成功的。
替代性实施例示出于图12和图13中,具有与图5到图11的实施例的组件类似的组件。
公开的实施例使用与在其他应变伸长计中使用的光学编码器类似的光学编码器,以进行横向应变测量。由于是在标尺后的光学读取头,所以测量范围只受到标尺的指定长度限制。这种增加的范围允许增加的功能性(相信在以前是无法提供的),例如,在测试前测量样本宽度的能力。这种功能,与自动垂直运动相结合,可减少或消除对于昂贵的样本测量系统的需求、许多测试标准的要求。
此外,与现有技术中的当前技术相比,线性光学编码器常提供其他优势,包括系统的耐久性和强健性,假定测量装置的两个成对的半部分不相互接触。当昂贵装置如此靠近并经常接触激烈的样本断裂处时,这具有很大的重要性。
线性光学编码器的使用还提供超过现有技术中使用的磁尺和其他线性编码器系统的分辨率和准确度的分辨率和准确度,且相比其他类似的准确解决方案更简单、更价廉和更容易封装。
鉴于单个读取头的其使用,公开的TSMU 10为低成本测量选择。在编码器读取头90与第二传感器臂32一致地移动且编码器标尺88与第一传感器臂30一致地移动的情况下,TSMU 10使用两者之间的相对运动进行其测量。测试经常只需要第一传感器臂30与第二传感器臂32之间的距离的准确测量,这是此实施例的架构所实现的。此方法还经常仅需要一条信号缆线以离开TSMU 10,所述信号缆线可与通常供轴向应变伸长计使用的轻型电缆相同或类似。
公开的配置对公开的实施例的使TSMU的封装尺寸和质量最小化的能力有显著的帮助,由此允许更简单和价廉得多的被动垂直运动以最有效率地发挥功能,与较重的移动组合件相比,这又可望允许在更精细的样本上的恰当使用。
如同公开的实施例的其他方面,运动被设计以使尺寸、质量和成本最小化。公开的实施例使用单一致动器(经由机动化的驱动轴杆59)以打开和合拢第一传感器臂30和第二传感器臂32。公开的实施例使用第一盘簧72和第二盘簧78而非致动器来将第一传感器臂30和第二传感器臂32推动到样本。公开的实施例只使用致动器来同时改变第一盘簧72和第二盘簧78的伸长率。一旦已由反作用于第一弹簧72和第二弹簧78的致动器推动第一传感器臂30和第二传感器臂32使之分开,电动机简单地驱动回到其原位置。当此发生时,第一弹簧72和第二弹簧78也迫使传感器臂30、32返回到其原(或合拢)位置,除了当与样本接触时中断此运动之外。第一弹簧72和第二弹簧78确保当样本应变时,传感器臂30、32跟随样本而不滑脱。第一弹簧72和第二弹簧78提供必要的接触力以防止滑脱。每一传感器臂30、32跨骑在高准确度、低摩擦的承载组合件上以使测量应变时的摩擦损失和粘滑副作用最小化。
公开的实施例的此机构还通过设计允许大量的前后样本不对准,而无不利的测试结果。两个传感器臂30、32可在相互接触时从其原位置沿任一方向移动若干毫米。
最后,公开的实施例使用低质量、低成本正时输送带,这可望进一步有助于垂直被动运动的成功。
TSMU 10的封装足够紧凑,使得全部单元侧向移动进入和离开测试区域。这允许传感器臂30、32保持格外地短,这进而使尺寸和质量最小化,且减少归因于偏转的误差。TSMU10的这种侧向运动使其进入和离开其保护壳,从而对其提供额外保护,以免受源自激烈的样本断裂处的物理损坏。
公开的实施例希望提出一种新颖方法,该方法提供满足最高测试标准的准确度,同时给出简单、健全、灵巧和功能性增加的产品。
因此,若干前述目标和优势被最有效地获得。虽然本发明的优选实施例已在本文中详细地公开和描述,但应理解,本发明决不由此受限制。
- 自动横向应变伸长计架构
- 自动横向应变伸长计架构