一种用于智能制造的多功能工业机器人
文献发布时间:2023-06-19 10:21:15
技术领域
本发明涉及机器人技术领域,具体是涉及一种用于智能制造的多功能工业机器人。
背景技术
随着社会和科技的发展,人们对于自动化更加痴迷,自动化生产线有其独特的优势,比如人力成本低,生产效率高,容易控制。自动化生产线的重要组成部分包括机器人,传统的流水线生产机器人的使用多数局限于机器人手臂的使用,然后对机器人手臂的部分进行改进,造价较高,不适合长距离进行操作作业;焊接作为一种常用的连接方式,具有连接强度高,不易损坏等优点。传统的机器人只是简单的机器人手臂,对流水线上输送的零部件进行简单的焊接,功能单一,适用范围较窄。
中国专利CN201810575989.7公开了一种用于智能制造自动化生产线的多功能工业机器人,其包括底板,底板上固定有焊接机械手,底板的下方设有小车轮组;第一齿条和第一导轨组上设置有沿第一导轨组直线运动的焊接机械手,焊接机械手包括焊接平台,焊接平台的下方设置有支撑腿,支撑腿滑动设置在第一导轨组上,第一电机的输出轴同轴连接有第一齿轮,第一齿轮和第一齿条相互啮合,第一电机的一侧设置有安装杆,安装杆的底部设置有支撑轮,支撑轮与底板滚动接触;焊接平台上安装有转盘,转盘的外部套设有齿轮环,齿轮环的内侧面与转盘的外侧面过盈配合,齿轮环啮合有第二齿轮。
该工业机器人仅通过锤击装置无法去除附着的焊疤,且无法适应焊接高度差较大的工件。
发明内容
为解决上述技术问题,提供一种用于智能制造的多功能工业机器人,本技术方案解决了工件自动焊接问题。
为达到以上目的,本发明采用的技术方案为:
一种用于智能制造的多功能工业机器人,包括有:轨道车;剪叉式升降机,设置在轨道车顶端;高精度旋转台,其工作端竖直朝上设置在剪叉式升降机顶端;多轴吹气机构、多轴焊接机构和多轴打磨机构,所述机构沿径向均布在高精度旋转台工作端,所述多轴吹气机构工作端包括有能够自动调节其出气角度的吹气嘴,所述多轴焊接机构工作端包括有能够自动调节其焊接角度的焊接头,所述多轴打磨机构工作端包括有轴线水平且能够沿竖直及两侧方向弹性移动的柔性抵接轮,所述多轴打磨机构还还包括有套设在柔性抵接轮上用于打磨的打磨带;工业相机,其工作端倾斜朝向所述机构工作端设置在所述机构上,所述工业相机与控制器电连接。
优选地,多轴吹气机构还包括有:第一多轴移动器,设置在高精度旋转台工作端;第一弹性连接架,设置在第一多轴移动器工作端;第一固定板和第一转动板,所述第一固定板水平设置在第一弹性连接架工作端,所述第一转动板一端与第一固定板一端铰接,且吹气嘴固定设置在第一转动板另一端;第一角度调节器,设置在第一固定板一侧用于调节第一转动板相对第一固定板角度。
优选地,多轴焊接机构还包括有:第二多轴移动器,相对多轴吹气机构均设在高精度旋转台工作端;第二弹性连接架,设置在第二多轴移动器工作端;第二固定板和第二转动板,所述第二固定板水平设置在第二弹性连接架工作端,所述第二转动板一端与第一固定板一端铰接,且焊接头固定设置在第二转动板另一端;第二角度调节器,设置在第二固定板一侧用于调节第二转动板相对第二固定板角度。
优选地,多轴打磨机构还包括有:第三多轴移动器,相对多轴吹气机构和多轴焊接机构均布在高精度旋转台工作端;第一连接板,设置在第三多轴移动器工作端,且其外侧倾斜设置有第一斜板;安装板,竖直设置在第一斜板斜侧;第一伺服电机和主动轮,所述第一伺服电机输出轴水平贯穿安装板与主动轮同轴固定连接;气弹簧和绷紧轮,所述气弹簧输出轴竖直朝上固定设置在安装板一侧,所述绷紧轮与主动轮同轴向转动设置在气弹簧输出轴上;滑动板和导轨,所述滑动板通过导轨竖直滑动设置在安装板一侧,且所述滑动板底端设置有位于安装板底部的底板;双轴双杆气缸,工作端竖直朝下设置在安装板一侧,且所述双轴双杆气缸工作端与滑动板顶端固定连接;升降板、第一固定销和第一弹簧,所述升降板通过第一固定销竖直滑动设置在底板底部,所述第一弹簧同轴套设在第一固定销上且其两端分别抵接在升降板顶端和底板底端;三角架,其尖端朝向设置有轴线水平且用于转动安装柔性抵接轮的第一固定轴,所述三角架顶端中心位置设置有与第一固定轴同轴向的第一固定轴,所述第一固定轴与转动座转动配合,所述三角架顶端两侧还设置有与第一固定轴同轴线的第三固定轴;拉簧,其两端分别于第三固定轴和升降板两侧固定连接;打磨带套设在主动轮、绷紧轮和柔性抵接轮上。
优选地,剪叉式升降机上还设置有轴线竖直且用于检测其顶端升降高度的测距传感器,所述测距传感器与控制器电连接。
优选地,第一多轴移动器包括有第一滚珠丝杆滑台、第二滚珠丝杆滑台和第三滚珠丝杆滑台,所述第一滚珠丝杆滑台水平设置在高精度旋转台工作端,所述第二滚珠丝杆滑台竖直设置在第一滚珠丝杆滑台工作端,所述第三滚珠丝杆滑台水平且与第一滚珠丝杆滑台垂直设置在第二滚珠丝杆滑台工作端,第一弹性连接架设置在第三滚珠丝杆滑台工作端,第二多轴移动器和第三多轴移动器均与第一多轴移动器结构完全相同。
优选地,第一弹性连接架包括有:第二连接板,固定设置在第一多轴移动器工作端,所述第二连接板一侧倾斜设置有第二斜板;安装支架和第二固定销,所述安装支架通过第二固定销与第二斜板滑动配合,第一固定板固定设置在安装支架顶端;第二弹簧,同轴套设在第二固定销上,且其两端分别抵接在第二斜板和安装支架相对侧;第二弹性连接架与第一弹性连接架结构完全相同。
优选地,第一角度调节器包括有:固定杆,水平设置在第一固定板一侧,且所述固定杆顶端设置有轨道槽;第一连杆,其一端与固定杆一端铰接,且其另一端通过轴销与第一转动板转动配合;内螺纹滑动块,滑动设置在轨道槽中;第二连杆,其一端与内螺纹滑动块顶端铰接,另一端与第一连杆顶端铰接;螺纹柱,同轴转动设置在轨道槽中且与内螺纹滑动块同轴螺纹拧接;第二伺服电机,其输出轴与螺纹柱一端同轴固定连接;第二角度调节器与第一角度调节器结构完全相同。
优选地,第一斜板上还设置有与安装板倾斜滑动固定连接的腰型槽。
优选地,安装板一侧还垂直设置有用于放置打磨带脱离柔性抵接轮、主动轮和绷紧轮的挡杆。
本发明与现有技术相比具有的有益效果是:
本工业机器人能够自动移动工位,且能够自动吹气、焊接和打磨,具体的,工作时,通过轨道车能够实现本工业机器人在不同工位的移动,从而便于生产;启动剪叉式升降机,能够使得位于高精度旋转台顶端的多轴吹气机构、多轴焊接机构和多轴打磨机构工作端位于加工工件顶部适当位置,从而便于生产,启动高精度旋转台,能够使得多轴吹气机构、多轴焊接机构和多轴打磨机构工作端带加工工件顶部交换位置,从而便于依次进行吹气、焊接和打磨;启动第一多轴移动器,使得位于加工工件顶部的吹气嘴对焊接点进行吹气,从而通过高压气体将焊接点出灰尘或其他污染物吹走,从而防止其影响焊接效果,且通过第一角度调节器能够自动调节吹气嘴输出角度,从而均匀对焊点吹气,防止有死角未吹气;吹气结束后,启动高精度旋转台,使得多轴焊接机构回转至加工工件顶部,启动焊接头和第二多轴移动器,从而对加工工件焊接点进行焊接,且通过第二角度调节器能够调节焊接头角度,从而能够均匀焊接,防止出现漏焊状况;当焊接结束后,启动高精度旋转台,使得多轴打磨机构回转至加工工件顶部,启动第一伺服电机和双轴双杆气缸,使得主动轮带动打磨带柔性抵接在加工工件顶端,从而使得打磨带在焊接面进行打磨,从而去除焊疤;在吹气、焊接及打磨过程中,通过工业相机能够实时观察所述机构工作端工作状况,从而实现精准吹气、焊接及打磨,相比现有技术,本机器人工作效率和精度更高。
附图说明
图1为本发明的立体图;
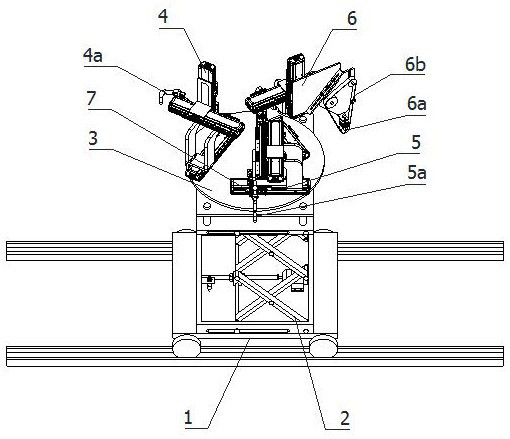
图2为本发明的正视图;
图3为本发明的俯视图;
图4为本发明的侧视图;
图5为本发明的多轴吹气机构的立体图;
图6为图5的A处局部放大图;
图7为本发明的多轴焊接机构的立体图;
图8和图10分别为本发明的多轴打磨机构在两种不同视角下的立体图;
图9为图8的B处局部放大图。
图中标号为:
1-轨道车;
2-剪叉式升降机;2a-测距传感器;
3-高精度旋转台;
4-多轴吹气机构;4a-吹气嘴;4b-第一多轴移动器;4b1-第一滚珠丝杆滑台;4b2-第二滚珠丝杆滑台;4b3-第三滚珠丝杆滑台;4c-第一弹性连接架;4c1-第二连接板;4c2-第二斜板;4c3-安装支架;4c4-第二固定销;4c5-第二弹簧;4d-第一固定板;4e-第一转动板;4f-第一角度调节器;4f1-固定杆;4f2-轨道槽;4f3-第一连杆;4f4-内螺纹滑动块;4f5-第二连杆;4f6-螺纹柱;4f7-第二伺服电机;
5-多轴焊接机构;5a-焊接头;5b-第二多轴移动器;5c-第二弹性连接架;5d-第二固定板;5e-第二转动板;5f-第二角度调节器;
6-多轴打磨机构;6a-柔性抵接轮;6b-打磨带;6c-第三多轴移动器;6d-第一连接板;6d1-第一斜板;6d2-腰型槽;6e-安装板;6e1-挡杆;6f-第一伺服电机;6g-主动轮;6h-气弹簧;6i-绷紧轮;6j-滑动板;6j1-底板;6k-导轨;6m-双轴双杆气缸;6n-升降板;6n1-转动座;6o-第一固定销;6p-第一弹簧;6q-三角架;6q1-第一固定轴;6q2-第二固定轴;6q3-第三固定轴;6r-拉簧;
7-工业相机。
具体实施方式
以下描述用于揭露本发明以使本领域技术人员能够实现本发明。以下描述中的优选实施例只作为举例,本领域技术人员可以想到其他显而易见的变型。
参照图1所示,一种用于智能制造的多功能工业机器人,包括有:
轨道车1;
剪叉式升降机2,设置在轨道车1顶端;
高精度旋转台3,其工作端竖直朝上设置在剪叉式升降机2顶端;
多轴吹气机构4、多轴焊接机构5和多轴打磨机构6,所述机构沿径向均布在高精度旋转台3工作端,所述多轴吹气机构4工作端包括有能够自动调节其出气角度的吹气嘴4a,所述多轴焊接机构5工作端包括有能够自动调节其焊接角度的焊接头5a,所述多轴打磨机构6工作端包括有轴线水平且能够沿竖直及两侧方向弹性移动的柔性抵接轮6a,所述多轴打磨机构6还还包括有套设在柔性抵接轮6a上用于打磨的打磨带6b;
工业相机7,其工作端倾斜朝向所述机构工作端设置在所述机构上,所述工业相机7与控制器电连接。
工作时,通过轨道车1能够实现本工业机器人在不同工位的移动,从而便于生产;
启动剪叉式升降机2,能够使得位于高精度旋转台3顶端的多轴吹气机构4、多轴焊接机构5和多轴打磨机构6工作端位于加工工件顶部适当位置,从而便于生产,启动高精度旋转台3,能够使得多轴吹气机构4、多轴焊接机构5和多轴打磨机构6工作端带加工工件顶部交换位置,从而便于依次进行吹气、焊接和打磨;
启动多轴吹气机构4,使得位于加工工件顶部的吹气嘴4a对焊接点进行吹气,从而通过高压气体将焊接点出灰尘或其他污染物吹走,从而防止其影响焊接效果,且吹气嘴4a输出端能够自动调节角度,从而均匀对焊点吹气,防止有死角未吹气;
吹气结束后,启动高精度旋转台3,使得多轴焊接机构5回转至加工工件顶部,启动焊接头5a对加工工件焊接点进行焊接,且焊接头5a角度可自动调节,从而能够均匀焊接,防止出现漏焊状况;
当焊接结束后,启动高精度旋转台3,使得多轴打磨机构6回转至加工工件顶部,使得柔性抵接轮6a带动打磨带6b柔性抵接在加工工件顶端,从而使得打磨带6b在焊接面进行打磨,从而去除焊疤;
在吹气、焊接及打磨过程中,通过工业相机7能够实时观察所述机构工作端工作状况,从而实现精准吹气、焊接及打磨。
如图5和图6所示,多轴吹气机构4还包括有:
第一多轴移动器4b,设置在高精度旋转台3工作端;
第一弹性连接架4c,设置在第一多轴移动器4b工作端;
第一固定板4d和第一转动板4e,所述第一固定板4d水平设置在第一弹性连接架4c工作端,所述第一转动板4e一端与第一固定板4d一端铰接,且吹气嘴4a固定设置在第一转动板4e另一端;
第一角度调节器4f,设置在第一固定板4d一侧用于调节第一转动板4e相对第一固定板4d角度。
启动第一多轴移动器4b,能够使得吹气嘴4a沿竖直和水平方向调整吹气位置,且第一固定板4d通过第一弹性连接架4c设置在第一多轴移动器4b工作端,从而避免了吹气嘴4a直接刚性抵触在工件表面,而通过启动第一角度调节器4f,能够调节第一转动板4e相对第一固定板4d角度,从而便于使得吹气嘴4a能够对工件死角进行吹气。
如图7所示,多轴焊接机构5还包括有:
第二多轴移动器5b,相对多轴吹气机构4均设在高精度旋转台3工作端;
第二弹性连接架5c,设置在第二多轴移动器5b工作端;
第二固定板5d和第二转动板5e,所述第二固定板5d水平设置在第二弹性连接架5c工作端,所述第二转动板5e一端与第一固定板4d一端铰接,且焊接头5a固定设置在第二转动板5e另一端;
第二角度调节器5f,设置在第二固定板5d一侧用于调节第二转动板5e相对第二固定板5d角度。
启动第二多轴移动器5b,能够使得焊接头5a沿竖直和水平方向调整焊接位置,且第二固定板5d通过第二弹性连接架5c设置在第二多轴移动器5b工作端,从而避免了焊接头5a直接刚性抵触在工件表面,而通过启动第二角度调节器5f,能够调节第二转动板5e相对第二固定板5d角度,从而便于使得焊接头5a适应不同的焊接方式。
如图8、图9和图10所示,多轴打磨机构6还包括有:
第三多轴移动器6c,相对多轴吹气机构4和多轴焊接机构5均布在高精度旋转台3工作端;
第一连接板6d,设置在第三多轴移动器6c工作端,且其外侧倾斜设置有第一斜板6d1;
安装板6e,竖直设置在第一斜板6d1斜侧;
第一伺服电机6f和主动轮6g,所述第一伺服电机6f输出轴水平贯穿安装板6e与主动轮6g同轴固定连接;
气弹簧6h和绷紧轮6i,所述气弹簧6h输出轴竖直朝上固定设置在安装板6e一侧,所述绷紧轮6i与主动轮6g同轴向转动设置在气弹簧6h输出轴上;
滑动板6j和导轨6k,所述滑动板6j通过导轨6k竖直滑动设置在安装板6e一侧,且所述滑动板6j底端设置有位于安装板6e底部的底板6j1;
双轴双杆气缸6m,工作端竖直朝下设置在安装板6e一侧,且所述双轴双杆气缸6m工作端与滑动板6j顶端固定连接;
升降板6n、第一固定销6o和第一弹簧6p,所述升降板6n通过第一固定销6o竖直滑动设置在底板6j1底部,所述第一弹簧6p同轴套设在第一固定销6o上且其两端分别抵接在升降板6n顶端和底板6j1底端;
三角架6q,其尖端朝向设置有轴线水平且用于转动安装柔性抵接轮6a的第一固定轴6q1,所述三角架6q顶端中心位置设置有与第一固定轴6q1同轴向的第一固定轴6q1,所述第一固定轴6q1与转动座6n1转动配合,所述三角架6q顶端两侧还设置有与第一固定轴6q1同轴线的第三固定轴6q3;
拉簧6r,其两端分别于第三固定轴6q3和升降板6n两侧固定连接;
打磨带6b套设在主动轮6g、绷紧轮6i和柔性抵接轮6a上。
第一斜板6d1用于将安装板6e安装在第一斜板6d1上,打磨时,启动第三多轴移动器6c,使得柔性抵接轮6a位于工件顶部,启动升降板6n,使其工作端推动滑动板6j在导轨6k上滑动,从而使得柔性抵接轮6a带动打磨带6b弹性抵接在工件表面,启动第一伺服电机6f,使其输出轴带动主动轮6g相对安装板6e转动,使其带动打磨带6b在主动轮6g、绷紧轮6i和柔性抵接轮6a上转动,从而使其打磨焊疤,且气弹簧6h能够使得绷紧轮6i始终将打磨带6b绷紧,从而防止打磨带6b过于松弛;而柔性抵接轮6a抵接时,使其带动三角架6q和升降板6n相对底板6j1克服第一弹簧6p弹力,且第二固定轴6q2与转动座6n1转动配合,第三固定轴6q3通过拉簧6r与升降板6n两侧弹性连接,从而使得三角架6q能够相对升降板6n弹性转动,且柔性抵接轮6a转动设置在第一固定轴6q1上,从而使得打磨带6b能够弹性抵接在焊疤外周,从而便于打磨;三角架6q用于滑动连接升降板6n和底板6j1,防止其之间相互脱离。
如图2所示,剪叉式升降机2上还设置有轴线竖直且用于检测其顶端升降高度的测距传感器2a,所述测距传感器2a与控制器电连接。
通过测距传感器2a能够实时监测剪叉式升降机2顶端升高高度,从而便于根据工件摆放高度调整最适用的工作高度。
如图5所示,第一多轴移动器4b包括有第一滚珠丝杆滑台4b1、第二滚珠丝杆滑台4b2和第三滚珠丝杆滑台4b3,所述第一滚珠丝杆滑台4b1水平设置在高精度旋转台3工作端,所述第二滚珠丝杆滑台4b2竖直设置在第一滚珠丝杆滑台4b1工作端,所述第三滚珠丝杆滑台4b3水平且与第一滚珠丝杆滑台4b1垂直设置在第二滚珠丝杆滑台4b2工作端,第一弹性连接架4c设置在第三滚珠丝杆滑台4b3工作端,第二多轴移动器5b和第三多轴移动器6c均与第一多轴移动器4b结构完全相同。
通过第一滚珠丝杆滑台4b1、第二滚珠丝杆滑台4b2和第三滚珠丝杆滑台4b3能够实现第一弹性连接架4c沿竖直和水平方向的移动,从而便于吹气嘴4a对不同摆放位置的工件进行吹气,且第二多轴移动器5b和第三多轴移动器6c均与第一多轴移动器4b结构完全相同,从而便于适应焊接和打磨不同尺寸的工件。
如图6所示,第一弹性连接架4c包括有:
第二连接板4c1,固定设置在第一多轴移动器4b工作端,所述第二连接板4c1一侧倾斜设置有第二斜板4c2;
安装支架4c3和第二固定销4c4,所述安装支架4c3通过第二固定销4c4与第二斜板4c2滑动配合,第一固定板4d固定设置在安装支架4c3顶端;
第二弹簧4c5,同轴套设在第二固定销4c4上,且其两端分别抵接在第二斜板4c2和安装支架4c3相对侧;
第二弹性连接架5c与第一弹性连接架4c结构完全相同。
第一固定板4d设置在安装支架4c3上,而安装支架4c3通过安装支架4c3与第二斜板4c2滑动配合,且第二弹簧4c5套设在第二固定销4c4上,从而便于消除第二连接板4c1与第一固定板4d之间的刚性力,从而防止吹气嘴4a刚性抵触工件,且第二弹性连接架5c与第一弹性连接架4c结构完全相同,使得第二弹性连接架5c能够消除焊接头5a工作端与工件的刚性抵接力。
如图6所示,第一角度调节器4f包括有:
固定杆4f1,水平设置在第一固定板4d一侧,且所述固定杆4f1顶端设置有轨道槽4f2;
第一连杆4f3,其一端与固定杆4f1一端铰接,且其另一端通过轴销与第一转动板4e转动配合;
内螺纹滑动块4f4,滑动设置在轨道槽4f2中;
第二连杆4f5,其一端与内螺纹滑动块4f4顶端铰接,另一端与第一连杆4f3顶端铰接;
螺纹柱4f6,同轴转动设置在轨道槽4f2中且与内螺纹滑动块4f4同轴螺纹拧接;
第二伺服电机4f7,其输出轴与螺纹柱4f6一端同轴固定连接;
第二角度调节器5f与第一角度调节器4f结构完全相同。
当需要调节第一固定板4d和第一转动板4e之间角度时,启动第二伺服电机4f7,使其输出轴带动螺纹柱4f6在轨道槽4f2中同轴转动,而内螺纹滑动块4f4与螺纹柱4f6同轴螺纹拧接,从而使其在轨道槽4f2中沿轴向滑动,而第二连杆4f5一端与内螺纹滑动块4f4顶端铰接,另一端与第一连杆4f3顶端铰接,且第一连杆4f3与固定杆4f1铰接,从而使得第一连杆4f3带动第一转动板4e相对第一固定板4d转动一定角度,从而便于调节吹气嘴4a吹气方向。
如图8所示,第一斜板6d1上还设置有与安装板6e倾斜滑动固定连接的腰型槽6d2。
通过腰型槽6d2能够使得安装板6e倾斜滑动固定设置在第一连接板6d上,从而便于安装和调节。
如图8所示,安装板6e一侧还垂直设置有用于放置打磨带6b脱离柔性抵接轮6a、主动轮6g和绷紧轮6i的挡杆6e1。
通过挡杆6e1,能够防止在工作状态下,所述打磨带6b脱离柔性抵接轮6a、主动轮6g和绷紧轮6i,从而便于使其稳定打磨。
本发明的工作原理:
本装置通过以下步骤实现本发明的功能,进而解决了本发明提出的技术问题:
步骤一,工作时,通过轨道车1能够实现本工业机器人在不同工位的移动,从而便于生产;
步骤二,启动剪叉式升降机2,能够使得位于高精度旋转台3顶端的多轴吹气机构4、多轴焊接机构5和多轴打磨机构6工作端位于加工工件顶部适当位置,从而便于生产,启动高精度旋转台3,能够使得多轴吹气机构4、多轴焊接机构5和多轴打磨机构6工作端带加工工件顶部交换位置,从而便于依次进行吹气、焊接和打磨;
步骤三,启动第一多轴移动器4b,使得位于加工工件顶部的吹气嘴4a对焊接点进行吹气,从而通过高压气体将焊接点出灰尘或其他污染物吹走,从而防止其影响焊接效果,且通过第一角度调节器4f能够自动调节吹气嘴4a输出角度,从而均匀对焊点吹气,防止有死角未吹气;
步骤四,吹气结束后,启动高精度旋转台3,使得多轴焊接机构5回转至加工工件顶部,启动焊接头5a和第二多轴移动器5b,从而对加工工件焊接点进行焊接,且通过第二角度调节器5f能够调节焊接头5a角度,从而能够均匀焊接,防止出现漏焊状况;
步骤五,当焊接结束后,启动高精度旋转台3,使得多轴打磨机构6回转至加工工件顶部,启动第一伺服电机6f和双轴双杆气缸6m,使得主动轮6g带动打磨带6b柔性抵接在加工工件顶端,从而使得打磨带6b在焊接面进行打磨,从而去除焊疤;
步骤六,在吹气、焊接及打磨过程中,通过工业相机7能够实时观察所述机构工作端工作状况,从而实现精准吹气、焊接及打磨。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是本发明的原理,在不脱离本发明精神和范围的前提下本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明的范围内。本发明要求的保护范围由所附的权利要求书及其等同物界定。
- 一种用于智能制造自动化生产线的新型多功能工业机器人
- 一种用于智能制造的多功能工业机器人