一种外骨骼机器人
文献发布时间:2023-06-19 10:21:15
技术领域
本申请涉及用于关节助力技术领域,特别是涉及一种外骨骼机器人。
背景技术
在具有正常的肢体行动的正常人在工作的时候,经常会需要搬动很重的东西进行作业,此时非常需要外力的配合减轻体力的负担。或在医疗康复领域,患者需要外力辅助进行康复训练。现行常采用外骨骼机器人解决上述问题。
但目前市面上的外骨骼机器人采用液压或者气压驱动,导致外骨骼机器人本身重量较大,不利于人体穿戴。
发明内容
本申请提供一种便携、实用的外骨骼机器人,以至少解决上述所提到的部分问题。
为解决上述技术问题,本申请采用的一个技术方案是:提出一种外骨骼机器人,该外骨骼机器人包括:髋关节绑缚件,可穿戴于人体的腰部;分别对称设置在髋关节绑缚件两侧且结构相同的两组驱动系统;控制器,分别连接两组驱动系统,控制器用于获取两组驱动系统的拉力信息和人体的姿态信息,并根据拉力信息和人体的姿态信息控制相应驱动系统的工作状态,其中,在人体的左下肢运动时,控制器用于控制左侧的驱动系统为人体的左下肢提供助力,右侧的驱动系统处于自由活动状态;在人体的右下肢运动时,控制器用于控制右侧的驱动系统为人体的右下肢提供助力,左侧的驱动系统处于自由活动状态;其中,驱动系统包括:下肢绑缚件、柔性绳索以及驱动单元,驱动单元设置在髋关节绑缚件上,下肢绑缚件可穿戴于人体的下肢,柔性绳索的一端连接驱动单元,另一端连接下肢绑缚件,其中,通过两侧的驱动单元交替转动,从而分别拉动两侧的柔性绳索交替收紧,以交替为人体的左下肢、右下肢提供助力。
其中,驱动系统还包括:传感魔术贴和拉力传感器,传感魔术贴可穿戴于人体的臀部后侧,拉力传感器可固定到人体的大腿后侧,拉力传感器用于实时测量柔性绳索的拉力信息;柔性绳索包括绳索内芯和绳索管套,绳索管套的两端分别与传感魔术贴、拉力传感器固定连接,绳索内芯的一端连接驱动单元,绳索内芯的另一端自绳索管套靠近传感魔术贴的一端穿入,并自绳索管套靠近拉力传感器的一端穿出后,与下肢绑缚件连接。
其中,驱动系统还包括:惯性传感器,惯性传感器设置在下肢绑缚件上,惯性传感器用于实时检测人体的姿态信息;其中,控制器分别与两组驱动系统的拉力传感器、惯性传感器通讯连接,且控制器分别与两组驱动系统的驱动单元通讯连接,控制器用于获取拉力信息和人体的姿态信息,并根据拉力信息和人体的姿态信息控制相应驱动单元的工作状态,以为人体的下肢提供助力。
其中,驱动单元包括:电机支架、电机以及绕线盘,电机支架固定在髋关节绑缚件上,电机支架、电机以及绕线盘,电机支架设置在电机一侧,且电机支架用于支撑电机;电机支架固定在髋关节绑缚件上,电机支架与绕线盘可拆卸连接,绕线盘缠绕有柔性绳索,电机支架上开设有第一安装孔,绕线盘上开设有第二安装孔,第一安装孔与第二安装孔贯通;电机包括输出轴,输出轴穿过第一安装孔和第二安装孔并位于第二安装孔内部,电机用于输出动力以驱动绕线盘旋转。
其中,电机支架与绕线盘上分别开设有第一连接通孔和第二连接通孔;驱动单元还包括:连接件,连接件穿设于第一连接通孔和第二连接通孔中,绕线盘通过第二连接通孔、第一连接通孔和连接件可拆卸安装在电机支架上。
其中,绕线盘包括层叠设置的第一子线盘、三角压线器以及第二子线盘,其中,三角压线器上设有沿轴向方向延伸的第一环形侧壁和第二环形侧壁,第一子线盘朝向三角压线器的一侧设有用于容置第一环形侧壁的第一环形凹槽,第二子线盘朝向三角压线器的一侧设有用于容置第二环形侧壁的第二环形凹槽;第二子线盘还设有朝向第一子线盘的圆柱凸起,三角压线器的内圈侧壁与圆柱凸起的柱面壁之间形成容置空间,柔性绳索的端部连接于圆柱凸起,三角压线器与电机支架连接,第一子线盘和第二子线盘相对于三角压线器同步转动,三角压线器将柔性绳索压紧至圆柱凸起。
其中,柔性绳索在矢状面内的出线方向与人体的髋关节在矢状面内的活动方向平行。
其中,电机为直流电机。
其中,柔性绳索为鲍登绳、钢丝线、大力马线中的至少一种。
其中,惯性传感器至少包括:三个单轴的加速度计和三个单轴的陀螺。
本申请的有益效果是:区别于现有技术,本申请仅采用髋关节绑缚件穿戴于人体的腰部,该髋关节绑缚件结构简洁、质量轻巧。控制器可以根据拉力信息和人体的姿态信息控制相应驱动系统的工作状态,可以达到在不妨碍穿戴者自由行走状态下保证助力效果,提高了外骨骼机器人对人体的配合度和穿戴者运动的灵活性。同时,通过两侧的驱动单元交替转动,分别拉动两侧的柔性绳索交替收紧,易于实现外骨骼机器人的柔顺控制,且有利于外骨骼机器人的整体轻量化,且助力效果更好。此外,该方案采用柔性绳索传递动力,不会对人体关节进行固定约束,因此,人体关节可以自由活动,提高了穿戴者运动的灵活性。
附图说明
为了更清楚地说明本申请实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。其中:
图1是本申请一实施例提供的外骨骼机器人的结构示意图;
图2是图1中驱动系统的第一结构示意图;
图3是图1中驱动系统的第二结构示意图;
图4是图1中驱动系统的第三结构示意图;
图5是图1中驱动系统的第四结构示意图。
具体实施方式
下面将结合本申请实施例中的附图,对本申请实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本申请一部分实施例,而不是全部实施例。基于本申请中的实施例,本领域普通技术人员在没有做出创造性的劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
本申请实施例中的术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括至少一个该特征。本申请的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。此外,术语“包括”和“具有”以及它们任何变形,意图在于覆盖不排他的包含。例如包含了一系列步骤或单元的过程、方法、系统、产品或设备没有限定于已列出的步骤或单元,而是可选地还包括没有列出的步骤或单元,或可选地还包括对于这些过程、方法、产品或设备固有的其它步骤或单元。
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本申请的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
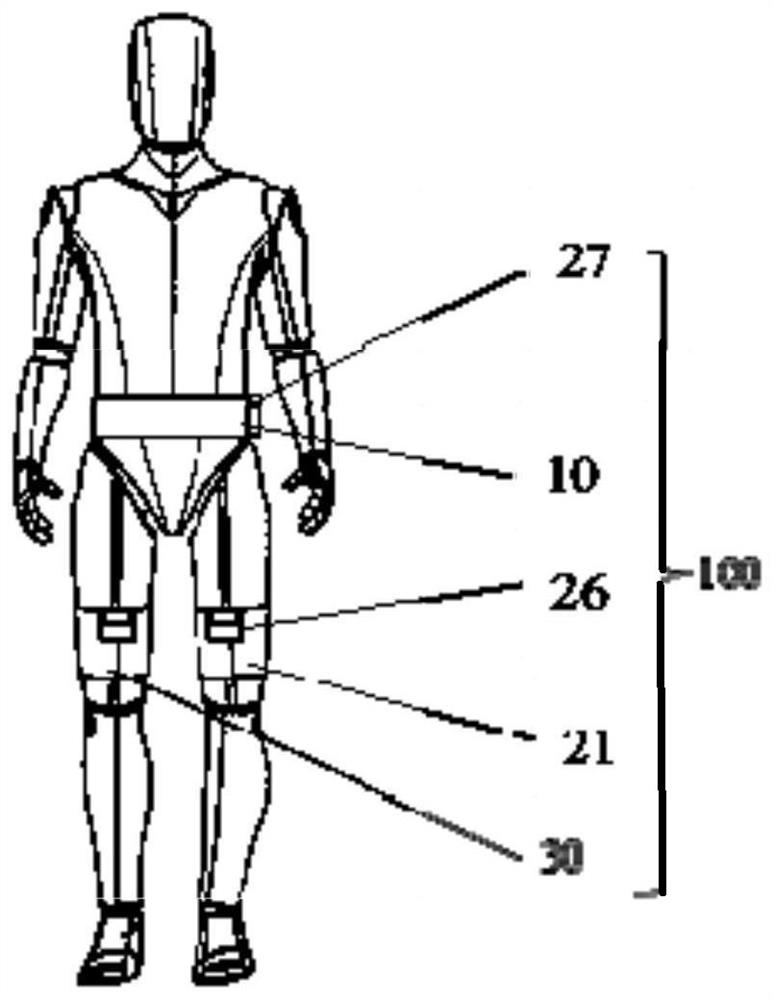
请参阅图1-2,图1是本申请一实施例提供的外骨骼机器人的结构示意图,图2是图1中驱动系统的第一结构示意图。
外骨骼机器人100可用于辅助人体搬运重物和行走,减少体力的负担。或者,外骨骼机器人100还可用于残障人士行走、搬运物体等动作,或辅助患者康复。又或者,外骨骼机器人100可用于辅助人体运动过程的各种姿态,例如匍匐、奔跑、长距离拉练及登山等。
外骨骼机器人100包括:髋关节绑缚件10、两组驱动系统20、30以及控制器(图未示出)。
髋关节绑缚件10可穿戴于人体的腰部,外骨骼机器人100通过髋关节绑缚件10与穿戴者接触。两组驱动系统20、30分别对称设置在髋关节绑缚件10两侧,且两组驱动系统20、30的结构相同。
控制器分别连接两组驱动系统20、30,控制器用于获取两组驱动系统20、30的拉力信息和人体的姿态信息,并根据拉力信息和人体的姿态信息控制相应驱动系统20的工作状态。
具体地,控制器可以对拉力信息和人体的姿态信息进行数据处理与分析,以确定驱动系统20的助力大小,其中,在人体的左下肢运动时,控制器用于控制左侧的驱动系统20为人体的左下肢提供助力,而右侧的驱动系统30处于自由活动状态,从而使穿戴者的右下肢能够无约束的动作;在人体的右下肢运动时,控制器用于控制右侧的驱动系统30为人体的右下肢提供助力,而左侧的驱动系统20处于自由活动状态,从而使穿戴者的左下肢能够无约束的动作。
传统刚性外骨骼机器人一般采用液压驱动、气压驱动,这两种驱动方式都存在如噪声、功率密度低、结构复杂等缺点,此外,液压驱动、气压驱动还会增加外骨骼的重量,而且还要保证系统的气密性,如果在意外情况下可能会使外骨骼失去工作能力,严重时可能对人体造成伤害。相比现有技术,本申请的驱动系统20包括:下肢绑缚件21、柔性绳索22以及驱动单元23。
驱动单元23设置在髋关节绑缚件10上,下肢绑缚件21可穿戴于人体的下肢,柔性绳索22的一端连接驱动单元23,另一端连接下肢绑缚件21,其中,通过两侧的驱动单元23交替转动,从而分别拉动两侧的柔性绳索22交替收紧,以交替为人体的左下肢、右下肢提供助力。
通过上述方式,本申请仅采用髋关节绑缚件10穿戴于人体的腰部,该髋关节绑缚件10结构简洁、质量轻巧。控制器可以根据拉力信息和人体的姿态信息控制相应驱动系统20的工作状态,可以达到在不妨碍穿戴者自由行走状态下保证助力效果,提高了外骨骼机器人100对人体的配合度和穿戴者运动的灵活性。同时,通过两侧的驱动单元23交替转动,分别拉动两侧的柔性绳索22交替收紧,易于实现外骨骼机器人100的柔顺控制,且有利于外骨骼机器人的整体轻量化,且助力效果更好。此外,该方案采用柔性绳索22传递动力,不会对人体关节进行固定约束,因此,人体关节可以自由活动,提高了穿戴者运动的灵活性。
请参阅图3,图3是图1中驱动系统的第二结构示意图。驱动系统20还包括:传感魔术贴24和拉力传感器25。其中,传感魔术贴24可穿戴于人体的臀部后侧,拉力传感器25可固定到人体的大腿后侧。
具体地,传感魔术贴24粘合在人体的臀部后侧,下肢绑缚件21可穿戴于人体的大腿,而拉力传感器25可与位于下肢绑缚件21上的固定环211连接,以实现拉力传感器25固定到人体的大腿后侧的目的。
进一步地,柔性绳索22包括绳索内芯和绳索管套,绳索管套的两端分别与传感魔术贴24、拉力传感器25固定连接。绳索内芯的一端连接驱动单元23,绳索内芯的另一端自绳索管套靠近传感魔术贴24的一端穿入,并自绳索管套靠近拉力传感器25的一端穿入后,与下肢绑缚件21连接。拉力传感器25用于实时测量柔性绳索22的拉力信息,由此,拉力传感器25通过柔性绳索22以及传感魔术贴24实时采集人体与驱动单元23之间的交互力。
继续参阅图1-2,驱动系统20还包括:惯性传感器26。该惯性传感器26设置在下肢绑缚件21上。
控制器分别通过有线和/或无线的连接方式与两侧驱动系统20的拉力传感器25、惯性传感器26通讯连接,且控制器分别与两侧驱动系统20的驱动单元23通讯连接。惯性传感器26可以为惯性测量单元(Inertial measurement unit,IMU),是测量物体三轴姿态角(或角速率)以及加速度的装置。一般的,一个IMU包含了三个单轴的加速度计和三个单轴的陀螺,加速度计检测物体在载体坐标系统独立三轴的加速度信号,而陀螺检测载体相对于导航坐标系的角速度信号,测量物体在三维空间中的角速度和加速度,并以此解算出物体的姿态。采用惯性传感器26能够及时的检测人体姿态的数据并及时反馈给控制器,以便外骨骼机器人100在准确的时间点提供助力。
惯性传感器26用于实时检测人体的姿态信息,拉力传感器25用于实时测量柔性绳索22的拉力信息,控制器用于获取拉力信息和人体的姿态信息,并根据拉力信息和人体的姿态信息控制相应驱动单元23的工作状态,以为人体的下肢提供助力。其中,在人体的左下肢运动时,控制器用于控制左侧的驱动系统20为人体的左下肢提供助力,右侧的驱动系统30处于自由活动状态;在人体的右下肢运动时,控制器用于控制右侧的驱动系统30为人体的右下肢提供助力,左侧的驱动系统20处于自由活动状态。
本实施例中,通过拉力传感器25实时测量柔性绳索22的拉力信息,通过惯性传感器26检测人体的姿态信息,可准确地识别与判断人体当前行走环境与运动状态,并获取相应的行走状态与特征信息,再通过控制器根据惯性传感器26获取的人体的姿态信息(如步态周期、脚落地时刻、脚离地时刻、大腿摆动位置、小腿摆动位置等)和拉力传感器25获取的柔性绳索22的拉力信息,为外骨骼机器人100的控制提供依据,并根据预测分析结果发送控制指令控制驱动单元23的工作状态,以辅助穿戴者步态调整,使穿戴者能够以自然高效的步态保持正常行走。
进一步地,控制器包括信息采集板(图未示出)和上位机(图未示出),信息采集板获取拉力传感器25、惯性传感器26的原始数据并对原始数据进行处理得到角度信息、压力信息等,并将角度信息、压力信息传递给上位机,进而上位机获取人体上肢、下肢的运动状态、运动意图,再向驱动单元23发送指令,以对人体的相应肢体动作进行助力。
可选地,控制器还可以是计算机,其拥有数据处理能力和逻辑判断能力,可完成上述控制器完成的动作。
在外骨骼机器人100在正常运作之前,人体左侧的驱动单元23首次通过预紧测定此时的预紧条件下的拉力值,然后右侧的驱动单元23转动到同样的位置以保证在不同穿戴者在穿着时能保证自由初始状态。在运动过程中柔性绳索22依次通过绳索管套、髋关节绑缚件10、拉力传感器25将力传递到髋关节处。控制器在进行数据处理与分析后控制驱动单元23工作,此时驱动单元23处于工作状态。当左腿运动的时候,左侧的驱动单元23提供助力,而右侧系统处于自由活动状态。反之,当右腿运动的时候,右侧的驱动单元23处于工作中,而左侧系统处于自由活动状态。
请参阅图4,图4是图1中驱动系统的第三结构示意图。驱动单元23包括:电机支架231、电机232以及绕线盘233。
电机支架231固定在髋关节绑缚件10上,电机支架231与绕线盘233可拆卸连接,绕线盘233缠绕有柔性绳索22,电机支架231上开设有第一安装孔2310,绕线盘233上开设有第二安装孔2330,第一安装孔2310与第二安装孔2330贯通。电机232包括输出轴2320,输出轴2320穿过第一安装孔2310和第二安装孔2330并位于第二安装孔2330内部,电机232用于输出动力以驱动绕线盘233旋转。在电机232正转过程时为穿戴者运动提供助力,反转时处于自由活动状态。
具体地,本申请设计了一种新型的绕线盘233结构,请参阅图5,图5是图1中驱动系统的第四结构示意图。绕线盘233包括层叠设置的第一子线盘2331、三角压线器2332以及第二子线盘2333,其中,三角压线器2332上设有沿轴向方向延伸的第一环形侧壁和第二环形侧壁,第一子线盘2331朝向三角压线器2332的一侧设有用于容置第一环形侧壁的第一环形凹槽,第二子线盘2333朝向三角压线器2332的一侧设有用于容置第二环形侧壁的第二环形凹槽。第二子线盘2333还设有朝向第一子线盘2331的圆柱凸起(图未示出),三角压线器2332的内圈侧壁与圆柱凸起的柱面壁之间形成容置空间,柔性绳索22的端部连接于圆柱凸起,三角压线器2332与电机支架连接,第一子线盘2331和第二子线盘2333相对于三角压线器2332同步转动,三角压线器2332将柔性绳索22压紧至圆柱凸起。
其中,柔性绳索22被固定在第一子线盘2331上,并通过三角压线器2332被压紧在绕线盘233中,通过第一子线盘2331与第二子线盘2333之间的配合,可以保证在转动过程中柔性绳索22的自由输入输出。
通过上述方式,本申请采用分层结构,上下结构的第一子线盘2331及第二子线盘2333配合中间的三角压线器2332使柔性绳索22在工作过程中不易脱轨、稳定地输入输出。
继续参阅图4,电机支架231上开设有第一连接通孔2314,绕线盘233上开设有第二连接通孔2334。
驱动单元23还包括:连接件234,连接件234穿设于第一连接通孔2314和第二连接通孔2334中,绕线盘233通过第二连接通孔2334、第一连接通孔2314和连接件234可拆卸安装在电机支架231上。
请参阅图3,柔性绳索22在矢状面内的出线方向与人体的髋关节平行,矢状面具体为与水平面和穿戴者人脸所在平面均垂直的面。
通过上述方式,让穿戴者在矢状面的腿部屈/伸动作更加自然顺畅,避免了被外骨骼机器人100的外骨骼穿戴结构约束而导致动作僵硬,传动效率更高。同时产品整体重量较轻,便于活动且成本低廉。
可选地,上述实施例中的电机232为直流电机232。
可选地,上述实施例中的柔性绳索22为鲍登绳、钢丝线、大力马线中的至少一种。
请参阅图1-5,本申请提供了一种外骨骼机器人100的技术方案。该技术方案采用电机232为驱动单元23,以惯性传感器26检测人体在运动过程中下肢的姿态,并通过拉力传感器25的信息采集和反馈系统确定助力的大小,达到在不妨碍人体自由行走状态下保证助力效果。每一组驱动系统20包括:电源27、驱动单元23、柔性绳索22、拉力传感器25、传感魔术贴24、下肢绑缚件21以及位于下肢绑缚件21上的固定环211。下肢绑缚件21穿戴于人体的大腿,电源27为驱动单元23供电,两组驱动系统20、30的驱动单元23均固定在髋关节绑缚件10上。
柔性绳索22设置在绕线盘233内,柔性绳索22的一端自绕线盘233输出后依次经过穿戴于人体臀部后侧的传感魔术贴24、绳索管套到达拉力传感器25处,再由拉力传感器25的底部引出至位于下肢绑缚件21上的固定环211。
在人体步行过程中,步行周期可分为支撑期与摆动期。在支撑期左腿由脚跟着地过渡到全脚支撑,再到摆动期的脚跟离地,而右腿配合左腿运动,该上述步行周期中左腿对应的左侧驱动系统20的惯性传感器26能够实时检测左腿的姿态数据并及时反馈给控制器,拉力传感器25实时测量柔性绳索22的拉力信息并及时反馈给控制器,控制器根据拉力信息和人体的姿态信息控制左侧的电机232正转为穿戴者的左腿运动提供助力,并控制右侧的电机232反转处于自由活动状态。
区别于现有技术,本申请仅采用髋关节绑缚件10穿戴于人体的腰部,该髋关节绑缚件10结构简洁、质量轻巧,可以实现自主快速穿脱,解决了目前市面上的外骨骼机器人穿戴困难的问题。同时,控制器可以根据拉力信息和人体的姿态信息控制相应驱动系统20的工作状态,可以达到在不妨碍穿戴者自由行走状态下保证助力效果,提高外骨骼机器人100对人体的配合度和穿戴者运动的灵活性。
以上仅为本申请的实施方式,并非因此限制本申请的专利范围,凡是利用本申请说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本申请的专利保护范围内。
- 一种用于外骨骼机器人的腿长调节机构及外骨骼机器人
- 一种外骨骼机器人骨骼关节驱动执行机构及外骨骼机器人