一种用于旋转的组件
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及一种组件,尤其涉及一种用于旋转的组件。
背景技术
反作用力一直以来都不能很好的与作用力共存,不能同时被很好的利用,这是现有技术的一道瓶颈。反作用力有时候也会对人们生活带来诸多不便,例如几个人站在一个转盘上想让转盘向同一个方向旋转是十分的困难,对人们来说十分的不便,而对于怎么解决这一技术难题一直以来都困扰着无数的科学家和发明家。
发明内容
本发明的目的是提供一种用于旋转的组件,以解决或至少减轻背景技术中所存在的至少一处的问题。
本发明的技术方案是:一种用于旋转的组件,包括第一物件、第三物件、第四物件、第五物件,其特征在于,在所述第三物件上至少设置一个所述第一物件,所述第一物件与所述第三物件可旋转的连接,所述第一物件本体的轴心点或质量中心点与所述第三物件的轴心点不在同一轴向线上;
在所述第一物件上设置第四物件,所述第四物件质量小于所述第一物件质量,所述第四物件与所述第一物件连接或一体成型,所述第四物件为所述第一物件传递动力,所述动力位于所述第一物件之外;所述动力的反作用力作用在所述第三物件上或作用在与所述第三物件直接或间接连接的可旋转的物体上;
所述第一物件的旋转动力通过所述第五物件与所述第一物件的旋转方向相反的旋转体的旋转动力相互作用;
所述第五物件与所述一种用于旋转的组件之内的物件连接或与所述一种用于旋转的组件连接的可旋转的组件连接。
进一步的,所述第一物件的半径小于所述第三物件的半径或在所述第三物件上设置第二物件所述第二物件和所述第一物件与所述第三物件可旋转的连接,所述第二物件的轴心与所述第一物件的轴心在同一轴心线上或在所述第一物件轴心与所述第三物件的轴心之间,所述第一物件和所述第二物件接收动力源提供的动力,所述第一物件与所述第二物件接收的所述动力方向相反。
进一步的,所述动力源设置在所述一种用于旋转的组件之内或设置在与所述的一种用于旋转的组件连接的组件上。
进一步的,所述动力源为所述第一物件提供的所述动力的所述反作用力作用在所述第三物件上,所述第一物件的质量之和与数量的比值大于所述第三物件的质量。
进一步的,所述第三物件接收所述第一物件和所述第二物件的动能差或所述动力源提供的所述动力的反作用力。
进一步的,在所述第三物件上设置的所述第一物件的质量之和与数量的比值大于所述第二物件的质量之和与数量的比值。
进一步的,所述第三物件和所述第一物件和所述第二物件为圆形体或由物体连接于圆环或轴承的旋转体,所述第四物件为杆形物体或圆形物体或磁性材料,所述第五物件为制动组件。
进一步的,所述制动件包括第一制动件、第二制动件,所述第一制动件为电机定子所述第二制动件为电机转子,所述电机定子与所述第二物件连接,所述电机转子与所述第一物件连接或间断接触或一体成型。
进一步的,所述第一物件间隔性接收所述动力源的所述动力,或所述制动组件间隔性为所述第一物件提供大于所述动力的阻力。
进一步的,所述动力源为人体或磁性组件或空气压强。
本发明的有益效果是:在第一物件之外施加作用力使得旋转体动能不会随力矩的成倍增加而成倍增加,旋转方向相反的旋转体通过电机组件相互作用将动能转换为电能,从而回收利用达到节能的目的。同时还可以将动力装置或者动力源设置在旋转组件或与旋转组件连接的旋转装置之内,从而不受反作用力的束缚。
附图说明
图1至图4为本发明施例中一种用于旋转的组件的不同连接方式的爆炸结构示意图;
图5、图7、图9、图11为本发明实施例中一种用于旋转的组件的预览参考图;
图6、图8、图10、图12、为本发明实施例中一种用于旋转的组件的各部件的结构爆炸示意图。
上述附图中各部件与附图标记的对应关系如下:
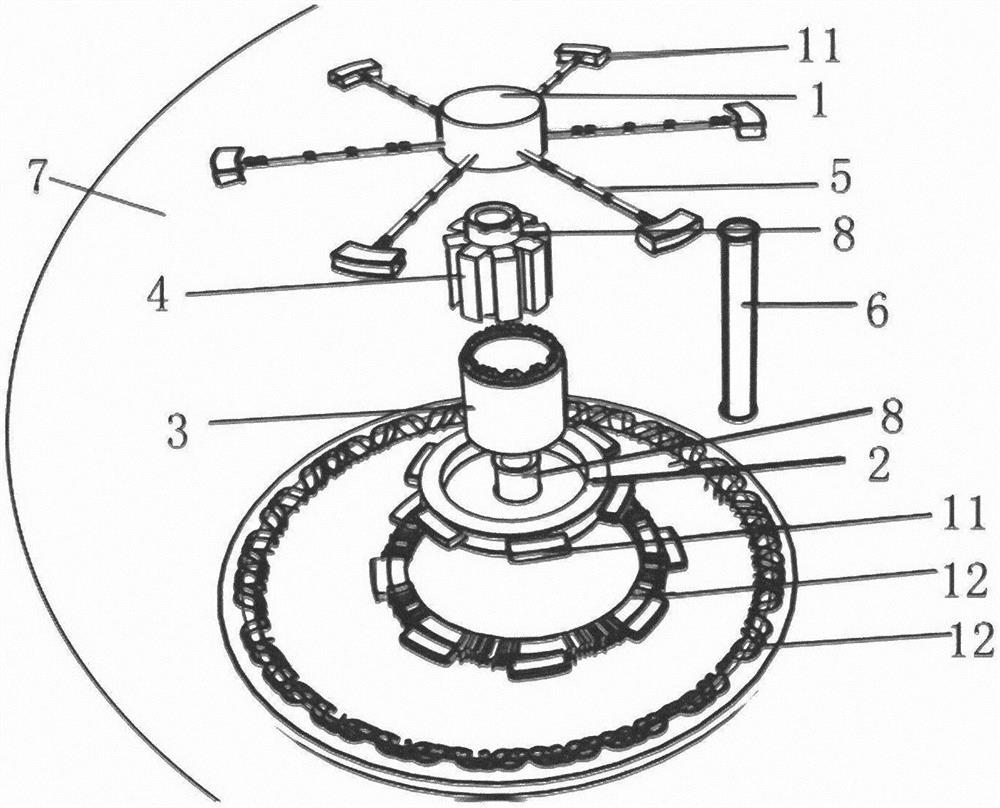
附图中:第一圆形体1,第二圆形体2,电机定子3,电机转子4,力臂件5,转轴6,第三圆形体7,轴承8,磁性体11,电磁组件12,螺丝13,扇叶14,套筒15,电子离合器组件66。
具体实施方式
下面结合附图来说明本发明的一种用于旋转的组件的具体实施例。
在本发明中,需要理解的是,术语“外侧”、“外环”“内环”等方向或者位置关系是基于附图所示的方位或位置关系,仅是为了便于描述,而不是指示或者暗示所指的装置关系具有特定的方位。
请参见图1至图4一种用于旋转的组件,包括第一物件、第三物件、第四物件、第五物件,其特征在于,在所述第三物件上至少设置一个所述第一物件,所述第一物件与所述第三物件可旋转的连接,所述第一物件本体的轴心点或质量中心点与所述第三物件的轴心点不在同一轴向线上;
在所述第一物件上设置第四物件,所述第四物件质量小于所述第一物件质量,所述第四物件与所述第一物件连接或一体成型,所述第四物件为所述第一物件传递动力,所述动力位于所述第一物件之外;所述动力的第一反作用力作用在所述第三物件上或作用在与所述第三物件直接或间接连接的可旋转的物体上;
所述第一物件的旋转动力通过所述第五物件与所述第一物件的旋转方向相反的旋转体的旋转动力相互作用;
所述第五物件与所述一种用于旋转的组件之内的物件连接或与所述一种用于旋转的组件连接的可旋转的组件连接。
图1是第一圆形体1与第二圆形体2的连接方式是套设在同一转轴6通过转轴6与第三圆形体7连接;
图2是第二圆形体通过轴承8与第三圆形体7连接,而第一圆形体1通过转轴6与第三圆形体7连接且第一圆形体1与第二圆形体2的轴心在同一直线上;图4是第一圆形体1通过轴承8与第二圆形体2连接而第二圆形体2又通过大轴承与第三圆形体7连接,在上述实施例中对四物件的可选方案为杆形或圆形物体作为的力臂件5,对第物物件的可选方案是电机组件:电机电子3和电机转子4
如图4所示,在本实施列中对第一圆形体1与电机转子4的连接方式也做了进一步的改进第一圆形体1是与电机转子4的铁心一体成型的。图1至图4是把部件向上提出来便于参考的,连接后的电机转子4是在电机定子3之内的,其余部件按照所述连接方式连接。
图3是第一圆形体1与第三圆形体7不同轴心的连接方式做为进一步的改进第一圆形体的直径比第三圆形体的直径小。
图5、图7、图9、图11、仅代表在第三圆形体上可设置多个第一圆形体,仅代表数量。
如图6、图8、图10、图12、所示也是把各部件向上提出来便于参考的,连接后的电机转子4是在电机定子3之内的,其余部件按照连接方式连接,同时也例举了动力源可设于旋转组件之上的方案。
在图5至图12的实施列中对第四物件的可选方案为杆形或圆形物体作为的力臂件5,对第五物件的可选方案是电机组件:电机电子3和电机转子4。
如图6所示,第一圆形体1与电机转子4连接,电机定子3与第二圆形体2连接,电机转子4内环和第二圆形体内环设有轴承8,第一圆形体1与第二圆形体2通过轴承8与第三圆形体7连接。
在本实施中第一圆形体1和第二圆形体2的旋转动力是通过磁性体11与电磁组件12来产生的,在力臂件5的外端和第二圆形体2的外环设置磁性体11并分别与第二圆形体2的外环和力臂件5的外端连接。在第三圆形体7的半径表面的范围设置电磁组件12,电磁组件12的中心与第一圆形体1和第二圆形体2的轴心在同一直线上,如图5所示在第三圆形体7上设置有多个第一圆形体。
通过以上设置与连接后,当电磁组件12通电后产生磁场,而产生的磁场与磁性体11的磁场方向相反,磁性体11通过力臂件5推动第一圆形体1和第二圆形体2旋转。当电源断开后,第一圆形体1与第二圆形体2继续旋转,由于所述两个旋转体上设有电机组件电机组件通电后,第一圆形体1与第二圆形体2的动力被电机组件的制动而逐渐减小,旋转体的机械能转换为电能从而回收。而电磁组件12侧推动第三圆形旋转体旋转。
本发明总的工作原理:由于直接用书本公式容易产生分歧,现举一个比较容易理解的列子来说明其工作原理,列如将两个完全相同的旋转体设在同一转轴上,转轴固定在同一物体的轴心外,分别在两个旋转体的外环设置大小相同而方向相反的作用力,而两个作用力的反作用力作用在物体上,当短开其作用力后两个完全相同的旋转体的动能和质量元的角动量总和是完全相同的,当两个旋转体通过制动组件接触后动能差为零,而作用力的反作用力合力也为零。现在用一个力臂件与其中一个旋转体的外环连接,不用考虑力臂件质量将作用力作用在力臂件上作用力与旋转体外环保持一定的距离,作用在另外一个旋转体的作用力位置保持不变。因为反作用力是随作用力的移动而移动的,从而得到两个反作用力对物体的的合力差,此合力差就是推动所述物体的动力,由于是在旋转体的质量元的外侧连接的力臂件,力臂成倍的增加而旋转体的动能和质量元的角动量是不会成倍增加的,当两个旋转体断开作用力后通过制动组件接触,两个旋转方向相反的旋转体的动能的差值就不会成倍的增加,而两个作用力的反作用力的差值是可以成倍增加的。从而整个旋转体系是会产生动能。例如力臂件延长1000米作用力大小保持不变,旋转体的动能在单位时间里是不会变成原来的1000倍,而两个反作用力对物体所产生的动能的差值侧在单位时间里可成1000倍的增加,而在旋转体外环增加力臂只会增加作用力在单位时间里所做的功,可以在添加力臂的旋转体上添加其质量使得两个大小相等方向相反的作用力在单位时间里所做的功相同,而两个作用力在单位时间里所做的功相同,所损失的冲量也相同,所以两个旋转体的差值不会是原来的1000倍,这样违背常理。添加质量只会增加旋转体的转动惯量,同时又减小了旋转体的角速度,旋转体的质量元的角动量不会成倍增加,其旋转体的质量元总和角动量不会成倍增加,故两个旋转体的动能的差值可小于两个作用力的反作用力对物体所产生的动能差。
如果想在相同的时间里增加所述物体的动能只需在设有力臂的旋转体上延长其力臂和加大物体的半径当然加大的半径肯定是有质量元的,同时又想省功的话最方便的办法就是在所述设有力臂的旋转体增加其质量使得两个作用力在单位时间里所做的功相同。当断开作用力后两旋转体通过所述制动组件相互作用将动能转化为电能。由于两旋转体是通过转轴与物体连接的,两作用力的反作用力对物体所产生的差值将推动物体及两个旋转体旋转。
当两个旋转体直径相等时可在其中一旋转体上设置力臂作用力作用在力臂上与旋转体保持一定距离使得两作用力的反作用力作用于物体时可产生不同的力矩。从而使得物体具有一定的动能,动能的大小与力臂的大小成正比,当短开作用力后两个旋转体的动能差就小于物体的动能,物体的动能是推动旋转组件旋转的动力。想让两个作用力在相同的时间里做功相等,就在设有力臂件的旋转体上添加质量,由于存在阻力和摩擦力在设有力臂的旋转体上添加质量可根据实际情况而定,或减小没有设置力臂的旋转体的质量。
在这里需要解释的是添加质量只是较好的说明其原理,便不是必须要添加质量,可以通过添加质量来测得两个旋转体在做功相同的情况下的质量比,从而来制定旋转体的大小。当然也可根据公式来计算。
当两个旋转体同轴连接而直径不等时,也可在任意一个旋转体的外环设置力臂,当力臂设在小直径的旋转体的外环时作用力的反作用力可作用在大旋转体的直径范围内,同理两个旋转体也会产生动力差;当力臂设在大直径的旋转体上时也可任意延长或预设力臂达到产生动力为止,当设有力臂的旋转体直接与物体不同轴心连接时,也同理,可产生动能,通过预设力臂或预设半径或加大力臂或加大一个旋转体半径或减小一个旋转体半径来获得大的动能,没有设力臂的旋转体的轴心也可以在设有力臂的旋转体的轴心与物体的轴心之间,只要在预设的动能差值的范围之内就可以。
以上为本发明的一种用于旋转的组件的工作原理。
如图6所示的结构图也是根据此原理电磁组件推动整个组件旋转。
如图8在本实施例中第一圆形体1是通过转轴6与第三圆形体7错位连接的,第一圆形体1为一空心体,力臂件5为空心管道与第一圆形体连接,空心管道的两端是贯穿的,动力组件也是磁性体11和电磁组件12,转轴6的上端设有套筒15,如图在套筒上设有贯穿套筒内壁的孔洞套筒是设置在第一圆形体的空心部位,在套筒的外环设有固定端,磁性体设在套筒之内,电磁组件通过螺丝13与套筒的固定端连接。在第三圆形体上设有扇叶14,扇叶是用于阻碍空气的速度从而产生反作用力,连接好后当电磁组件12通电后产生与磁性体11相反的磁场,从而推动磁性体做活塞运动,被压缩后的空气就产生作用力和反作用力,由于力臂件5的输出端在第一圆形体的外端可与第三旋转体产生旋转动能差,差值为推动组件旋转的动力。图7是代表第一圆形体上可设置多个,以方便稳定旋转。图9也是表示在第三圆形体7上可设置多个一圆形体和第二圆形体。
如图10,图10与图8的实施例其工作流程是相同的,结构区别在于转轴6为空心管道在空心管道上设有贯穿内壁的孔洞,转轴6具有孔洞的部位是在第二圆形体之内,圆形体1和圆形体2是设在同一转轴6上通过转轴与第三圆形体7连接,在第二圆形体的外环也设有空心管道,第一圆形体的空心管道的长度是大于第二圆形体空心管道的长度,从而得到反作用力的动能差。
图12与图11、展示的实施例是第一圆形体1的半径小于第二圆形体2时的结构图
在图12与图11中第一圆形体1外侧设有力臂件5,电机定子3与第二圆形体2连接,电机转子4与第一圆形体1连接,电机转子4的内环设有轴承8,第一圆形体1通过转轴6与第三圆形体7连接,磁性体11与力臂件的外端连接,电磁组件12设置在第二圆形体的外环与第二圆形体连接,第二圆形体体可旋转的与第三圆形体体7连接,在第二圆形体的外侧设有电子离合器的组件66,以方便第三圆形体接收第一圆形体与第二圆形体的动能差,此实施列中把反作用力设在第二圆形体上使得动力差值只取决与两个旋转体,从而第三圆形体的半径大小可随意的变化;当然也可把反作用力设在第三圆形体上,当设在第三圆形体时,离合器可取消,因为第三圆形体的差值可大于两个旋转体的差,两个旋转体接触始终是消耗动力的。
当电磁组件12通电后产生磁场所产生的磁场与磁性体11的磁性相反从而产生推力,第一圆形体1与第二圆形体2反方向旋转,由于第一圆形体的半径小于第二圆形体的半径在第一圆形体的外环设有力臂件从而可产生差值。当短开电源后两旋转体的动能通过电机组件转化为电能,而电子离合器将剩于的动能传递给第三圆形体,从而带动整个组件的旋转。
这里需要说明的是电机组件产生的阻力其实是一对平衡力最终只是起传递作用,当第一圆形体受到的阻力大于动力时由于惯性第一圆形体的剩余的旋转动力将与第二圆形体的剩余的旋转动力相互作用,也是一样的会差值,跟间断动力或让圆形体间断接收动力是一结果,间断动力只是一种可选的方案。
通过上述所述的实施例,可以得到动力源是可以设置在一个旋转体上的动力源为旋转装置提供的动力可以是一对平衡力也可以是多对平衡力,第一旋转体间断性接收动力是可以加速旋转装置旋转的。通过在一个旋转体的外侧施加动力使得整个组件或包含此组件的旋转装置可旋转,对人们日常生活来说也带来了方便,例如两个人体在如图3所示的一种用于旋转的组件上当人体手推动力臂杆旋转时而脚为第三圆形体提供反方向作用力通过间断性的提供动力整个组件就可旋转,从而比较好的解决了不能旋转的难题。
以上仅为本发明的可选实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应该能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的方案,均应当包含在本发明的保护范围内。
- 地板清洁设备,用于其的高速旋转刷件组件及用于高速旋转刷件的驱动联轴器组件
- 用于旋转机械的密封组件以及用于组装旋转机械的方法