一种肺癌放疗肿瘤运动跟随系统及方法
文献发布时间:2023-06-19 10:30:40
技术领域
本发明涉及医疗设备领域,尤其涉及放射治疗,具体是一种肺癌放疗肿瘤运动跟随系统及方法。
背景技术
放疗即肿瘤放射治疗,是利用放射线治疗肿瘤的一种局部治疗方法,大约70%的癌症患者在治疗癌症的过程中需要放射治疗,约有40%的癌症可以通过放疗实现根治的效果,放射治疗在肿瘤治疗中的作用和地位日益突出,已成为治疗恶性肿瘤的主要手段之一。放射治疗的原理在于利用不同组织器官以及各种肿瘤组织在收到照射后出现变化的反应程度各不相同,即放射敏感性,部分肿瘤的早期肿瘤体积小,血运好,肿瘤细胞氧含量高,放射敏感性高,此时肿瘤细胞无远地转移,针对性的进行放射治疗能够及时快速的灭杀几乎全部的肿瘤细胞,配合辅助治疗手段能够有效的起到根治的效果。
肺癌是发病率和死亡率增长最快,对人群健康和生命威胁最大的恶性肿瘤之一,近年来肺癌和发病率和死亡率均明显增高,位居所有恶性肿瘤的前端,不良的空气环境是造成肺癌发病的原因之一。与其它肿瘤不同,肺癌拥有很好的血运,适宜于利用放射治疗,但肺部随着患者呼吸不停运动,肺部肿瘤难以定位治疗,但易于扩散需尽快治疗,因此现有的肺癌治疗方案以外科手术为主。由于外科手术对患者带来的巨大破坏,严重降低了患者自体的免疫力和恢复能力,相当一部分通过手术治疗的肺癌患者都存在预后不良,患者生存能力较差,这严重影响了治疗的成功率和治疗效果。
随着技术的不断发展,人们开始面对肺癌患者的呼吸运动,积极的通过放射治疗来治疗肺部肿瘤,肺癌患者的呼吸运动是肺部肿瘤在患者的呼吸过程中,随肺叶的自然扩张与回缩,肿瘤在患者胸腔内的位置自然变动,其中上下反向运动最大,前后、左右方向运动幅度较小。肺癌患者的呼吸运动对肺癌放疗的影响主要在于剂量学,原因为:呼吸运动引起胸部器官和肿瘤运动,导致计划和实际治疗的解剖位置关系不同,产生正常组织受照较多和肿瘤部分区域低剂量;因为呼吸运动引起肺组织容积和密度变化,导致射野半影改变及与肺组织交接区域肿瘤低剂量。剂量的差异将影响放射治疗效果。
目前解决呼吸运动对肺癌放疗的影响的思路有很多,主要通过以下几种办法来实现:1.自由呼吸优化计划靶体积(PTV):根据同一病种大部分肿瘤的运动情况及摆位误差等不确定因素,使用概率性原则来决定使用多大的CTV(临床靶体积)-PTV间隙,或者针对特定患者肿瘤运动情况及摆位误差来设定间隙大小,在现代影像技术的指引下,如X线模拟机透视、PET(正电子发射断层扫描)-CT(电子计算机断层扫描)等,能够得到精确的肿瘤的解剖影像,进一步协调多野照射,能够有效的利用放射治疗的技术对肿瘤进行治疗,但是现有的放射治疗设备不能适应于这种方法的要求;2.呼吸控制:由于屏气时患者肺部几乎不运动,通过对患者的呼吸进行控制,可以使得患者在特定的时间段内肺部呼吸运动降低到很低的程度,通过患者自主深吸气屏气(deep inhalation breath holding,DIBH)或者主动呼吸控制(active breathing control,ABC)能够有效的提供用于放射治疗的时间段,但最大的问题是有相当多的患者不能耐受;3.呼吸门控放疗:在治疗过程中患者可自由呼吸,通过门控设备来监测呼吸周期中呼吸信号或其它可间接反映肿瘤位置的信号变化来控制治疗射线的开关,使只有在呼吸周期中的某一时相才有射线发生,呼吸门控最大的优点是患者可自由呼吸,射线治疗精准,缺点是需要相应的门控设备,而且需要门控信号对肿瘤位置的监控极其精准,另外,需要的模拟时间和治疗时间都很长;4.跟踪放疗:与门控放疗的原理相似,是在治疗过程中患者可自由呼吸,通过跟踪设备监测呼吸周期中的肿瘤位置变化来控制治疗射线开关,使只有在肿瘤位于某一位置范围内时才有射线发生,这种方案的优点一样是患者可自由呼吸,射线治疗精准,但是需要通过有创手术在肿瘤中或附近植入标志物并在术后取出,另外随着呼吸运动,肿瘤可能会变形或旋转等运动,而标志物不会,因此可能不能适应一些特定位置和特定运动状态的肿瘤;5.四维放疗:是在治疗的模拟、计划和实施过程中,不但考虑肿瘤和正常器官的空间三维位置,同时考虑它们在时间上的变化,从而在计划优化水平上解决肿瘤和正常器官的运动问题,换句话说,就是影像引导放射治疗(image guided radio therapy,IGRT),不控制患者呼吸,仅对患者的呼吸进行监测从而控制四维cone beam(锥形束)CT的扫描,在患者的不同呼吸时相采集各自的呼吸图像,然后将各时相的图像勾画出各自的靶区,在放疗时同样对患者的呼吸进行监测仪不同的呼吸时相采用不同的照射计划,理论上四维放疗技术能够极大的提高放射治疗的精准度,放射治疗耗时短,但四维放疗技术的发展需要影像学技术和设备的支持,现有的技术方案也是通过各种方向去探讨,优缺点都很明显。
现有专利《肺癌放疗肿块运动跟随护罩系统》,专利号为201310479309.9公开了一种辅助设备,依据了四维放疗的理念,但是更倾向于跟踪放疗,通过在护罩上预留可调节的遮挡孔,遮挡孔随当时的肿瘤轮廓来自动调节,这种方案能够一定程度上降低放射治疗放射误损伤的可能,但是对肿瘤靶区的标记通过体外进行,天然就降低了放射治疗的精准度,另一方面,肿瘤区域的剂量更加难以调节,很容易有残留,虽然从操作上看似降低了手术难度,但是大幅度削弱了放射治疗效果。现有专利《机器人无创放射治疗系统》,申请号为201310115139.6公开了一种设备,通过在体内肿瘤组织上放置电磁发生器来实现对运动肿瘤的智能追踪,属于利用影像引导下的跟踪放射治疗方案,如同前述中所提到的,需要通过有创手术进行植入和取出,面对肿瘤组织变形和旋转等运动时,定位可能偏移,在一定程度上降低了放射治疗的效率和治疗效果。
因此,人们依旧在不断的创新和改进,试图提供出一些能够更加优秀的、放射治疗耗时短、定位精准度高、治疗效果好的放射治疗方案来应对肺癌肿瘤的呼吸运动,来满足日益增长的医疗需求。
发明内容
为了解决现有技术的不足,本发明提出一种肺癌放疗肿瘤运动跟随系统及方法,能够有效的应对肺癌肿瘤的呼吸运动。
本发明要解决的技术问题是通过以下技术手段来实现的:
一种肺癌放疗肿瘤运动跟随系统,包括放射运动机构和手术固定机构,其中放射运动机构设置在手术床头部的一侧,沿手术床的左右侧边前后移动,包括机体,机体通过轨道设置在地面上,轨道的布置方向与手术床的布置方向一致,所述机体的上部为半包围的隧道型结构,包围在手术床的上方,内设放射头和放射头运动机构,手术固定机构设置在手术床的前半部,对患者的上半身进行调整和固定。
在本发明中,所述放射头运动机构包括转动台,转动台通过转动连接设置在机体朝向手术床的一面,转动台有三或四个,转动台的边缘处设为齿盘,相对应的机体上设置有与齿盘啮合的齿轮和第一伺服电机,每个转动台对应至少一个齿轮和一个第一伺服电机;所述转动台朝向手术床的一面为工作面,工作面为圆形,工作面上设置有贯穿中心的轨道和在轨道内自由移动的滑动台,轨道内侧设置有贯穿滑动台的滑动台螺杆,滑动台螺杆通过第二伺服电机带动;所述滑动台中空设置,中心嵌设有工作座,工作座一端开口,放射头固定在工作座的开口内,工作座的中部通过万向球面结构与滑动台内侧滑动连接,工作座的另一端分别连接有至少三个伸缩杆,伸缩杆沿工作座外壁呈辐射状均匀分布,伸缩杆一端与工作座连接,另一端连接到滑动台内侧壁上,每根伸缩杆通过第三伺服电机带动调节。
进一步的,所述万向球面结构包括设置在工作座侧壁的凸环和设置在滑动台内侧的滑动座,滑动座的内侧设置为凹面,且与凸环的凸面相配合。
进一步的,所述凸环的顶点处均匀设置有滚珠,滚珠沿凸环的外径最大处周向分布,相对应的,滑动座的内侧凹面均匀开设有长条形圆弧状的滑动凹槽,滑动凹槽的中心所在的平面与凸环所在平面相垂直,滑动凹槽与滚珠一一对应。
在本发明中,所述手术固定机构包括胸部固定机构,胸部固定机构包括左右相对布置的左侧胸部移动平台和右侧胸部移动平台,左侧胸部移动平台与右侧胸部移动平台通过胸横调节螺杆相连接,胸横调节螺杆分别与左侧胸部移动平台和右侧胸部移动平台螺接,且胸横调节螺杆与两侧胸部移动平台连接处的螺纹相反设置,左侧胸部移动平台及右侧胸部移动平台上分别设置有腋窝定位件,两个腋窝定位件对称分布,腋窝固定件包括固定在两侧胸部移动平台上的套管和在套管内插接的L型的定位杆,定位杆的中部弯折部位圆滑过渡,定位杆的一端空置,朝向床头方向,另一端为截面呈方形或十字形或三角形的均匀柱形,插接到结构相匹配的套管内。
进一步的,所述手术固定机构还包括腹部固定机构,腹部固定机构包括左右相对布置的左侧腹部移动平台和右侧腹部移动平台,左侧腹部移动平台与右侧腹部移动平台通过腹横调节螺杆相连接,腹横调节螺杆分别与左侧腹部移动平台与右侧腹部移动平台螺接,且腹横调节螺杆与两侧腹部移动平台连接处的螺纹相反设置,左侧腹部移动平台及右侧腹部移动平台上分别设置有腹部束缚件,两个腹部束缚件对称分布,两个腹部束缚件的上端通过可拆卸的松紧带相连接。
进一步的,所述腹部束缚件相对布置的一侧均设置有定位托,定位托为阶梯状,两侧定位托靠近床头的一端之间的间距大于另一端,定位托的中部平滑过渡,定位托相对的一侧设置有弹性缓冲层,定位托分别与患者第10肋和第11肋的左右侧相接触,使得定位托中部成为定位患者胸腔肋骨的标志。
进一步的,所述手术床的中部设置有支撑台,支撑台为长条形,设置在手术床中间,支撑台两端分别与手术床的首尾两端相固定,支撑台位于左侧胸部移动平台和右侧胸部移动平台之间,位于左侧腹部移动平台和右侧腹部移动平台之间,支撑台设置有沿手术床首尾方向的胸纵调节螺杆和腹纵调节螺杆,以及分别与胸纵调节螺杆和腹纵调节螺杆相配合的胸纵滑动块和腹纵滑动块,支撑台中部设置有分别供胸纵滑动块和腹纵滑动块自由滑动的空缺,胸纵调节螺杆通过螺接穿过胸纵滑动块并带动其在空缺内沿手术床纵向自由滑动,腹纵调节螺杆通过螺接穿过腹纵滑动块并带动其在空缺内沿手术床纵向自由滑动;所述胸横调节螺杆穿过胸纵滑动块并与之转动连接,腹横调节螺杆穿过腹纵调节块并与之转动连接。
进一步的,所述左侧胸部移动平台、右侧胸部移动平台、左侧腹部移动平台、右侧腹部移动平台的上平面均与支撑台上平面平齐,并分别通过弹性布与支撑台连接,弹性布下均匀设置若干条肋板,肋板的一端固定在支撑台侧面,另一端分别与左侧胸部移动平台、右侧胸部移动平台、左侧腹部移动平台、右侧腹部移动平台滑动连接;左侧胸部移动平台与左侧腹部移动平台通过弹性布连接,左侧胸部移动平台和左侧腹部移动平台分别与其相邻的床头/床尾通过弹性布连接,相对应的,右侧胸部移动平台与右侧腹部移动平台通过弹性布连接,右侧胸部移动平台和右侧腹部移动平台分别与其相邻的床头/床尾通过弹性布连接。
进一步的,所述手术床的下方设置有床体导轨,床体导轨与支撑台相垂直,分别承托起胸部固定结构和腹部固定结构,胸横调节螺杆穿过左侧胸部移动平台和右侧胸部移动平台的至少一侧,并于端头处设置调节手轮,腹横调节螺杆穿过左侧腹部移动平台和右侧腹部移动平台的至少一侧,并于端头处设置调节手轮;所述胸纵调节螺杆穿过床头和床尾的至少一侧,并于端头处设置调节手轮,腹纵调节螺杆穿过床头和床尾的至少一侧,并于端头处设置调节手轮,调节手轮处均设置有刻度盘。
基于上述构造,一种肺癌放疗肿瘤运动跟随方法,包括以下步骤:
(1)扫描与重建:将患者固定后,利用影像设备扫描患者胸部,并通过三维重建构建出电子三维模型,描绘出患者肺部的整体结构,以及肺部的肿瘤组织轮廓,并根据时间轴,扫描出患者靶组织的不同时相,导入智能系统,将三维模型训练为周期性变化的动态模型,作为治疗方案的依据,优选的采用CT或者PET-CT作为主要的影像设备;
(2)建立放射方案:以周期性变化的动态模型为基础,制定放射照射计划,模拟出时间轴上放射照射的位置、角度、剂量,本申请采用连续照射的办法;
(3)固定患者体位:将患者放置到手术床上,通过调整手术固定机构,对患者进行定位,使患者体位与放射照射计划中模型的体位保持一致;
(4)放射跟随肿瘤运动:开启放射运动机构,使得放射头依据治疗计划的运动和工作方式进行运动和工作。
在本发明中,所述的固定患者体位的步骤包括以下环节:
(1)准备:调整手术床床侧的调节手轮,使得左侧胸部移动平台、右侧胸部移动平台、左侧腹部移动平台、右侧腹部移动平台分别远离支撑台,弹性布张紧;
(2)粗调:患者躺在手术床上后,患者抬起双臂,调节手术床床侧的调节手轮,使得左侧胸部移动平台、右侧胸部移动平台、左侧腹部移动平台、右侧腹部移动平台分别分别向支撑台靠拢,直至腋窝定位件和腹部束缚件靠近患者躯干,患者双臂自然放下至躯干两侧;
(3)精调:分别反复调整手术床床侧的调节手轮和手术床床头/床尾的调节手轮,使得腋窝定位件精准定位于患者腋下,腹部定位托与患者第10肋和第11肋的左右侧相接触,以患者自然舒适为准;
(4)定位:设置松紧带,松紧带两端分别连接两侧腹部束缚件,读出各处调节手轮的读数,得出患者胸部上端宽度和胸骨下端宽度,然后通过胸部固定机构的定位杆固定患者肩部、腹部固定机构的松紧带固定患者腹部来实现对患者躯干的固定。
为了实现对患者肺癌肿瘤呼吸运动的跟随,本发明采用了以下的原理方法:对患者的组织结构进行扫描和重建,构建出随时间轴变化的三维立体图像,并通过深度学习算法,构建出周期性变化的三维立体图形,在这个基础上制定放射计划,模拟出每个时相放射头的照射位置、角度和强度,以尽可能的缩短放射治疗的时间,提高放射治疗的效率,减少辐射的副作用对术者和患者的影响。在这个基础上,有两个方向是需要注意的,一个是对患者手术体位的固定,必须与模拟中完全一致,另一个是对放射头的极致调节,快速精准的将放射头移动到指定的空间坐标点,并对其照射角度和放射强度进行调节。本申请中所采用的手术固定机构实现了前一个方向,通过对患者胸部上部的定位固定和患者胸骨下部的定位固定,实现了对患者胸部骨骼框架的定位和固定,放射头运动机构实现了后一个方向,通过转动台与滑动台的配合,实现了放射头的位置调节,通过工作座与滑动台的配合,及工作座后伸缩杆的联动配合,实现反射头的角度配合。
与现有技术相比,本发明具有以下优点:
(1) 本发明以四维放疗为基础,结合PTV、呼吸门控和跟踪放疗的方案,构建出一套肺癌肿瘤呼吸运动的跟随方法,分别利用了PTV的扫描定位和深度学习优化,使得多野照射能够有效的实现,极大的提高了放射治疗的效率和效果,利用了呼吸门控和跟踪放疗方案中对时相的控制,患者自由呼吸时,在每个时相分别针对性的进行放射照射,四维放疗作为基础,按照时间轴排列每个时相的状态,得到每个时相需求放射照射的方向和强度,并针对性的对多个放射头进行调节,规划出放射头的移动轨迹和动作,实现针对肺癌肿瘤呼吸运动的有效跟随;
(2) 放射头运动机构有效的实现了对放射头的极致调节,使得多个放射头能够在患者上方的工作区域自由配合,快速到达任意的位置和角度无死角,转动台的自由转动和滑动台直线运动的配合,使得在任意时间点都有放射头可以快速到达患者上方的任意位置,工作座在滑动台内侧的滑动连接实现了工作座的万向调节,以及工作座后方的伸缩杆联动配合,推动了工作座的万向角度调节的控制,这最终实现了放射头对患者肺癌肿瘤呼吸运动靶区域的快速精准的跟踪指向;
(3) 手术固定机构通过胸部固定机构对患者腋下腋窝的定位实现了对患者胸部上部的定位和固定,通过腹部固定机构对患者第10肋和第11肋的定位实现了对患者胸骨下部的定位和固定,以此实现了对患者胸部骨骼框架的定位和固定,在这个基础上,便可以轻易的对胸骨框架内容物特别是肺部的定位、扫描和运动跟踪;
因此,本发明通过设备与方法的配合,实现了患者手术体位的定位固定,实现了对放射头的极致调节,两者配合,进而实现了对放射头患者肺癌肿瘤呼吸运动的快速精准有效的跟踪指向,处理速度快,放射照射效率高,辐射带来的副反应少,自动化程度高,效果显著。
附图说明
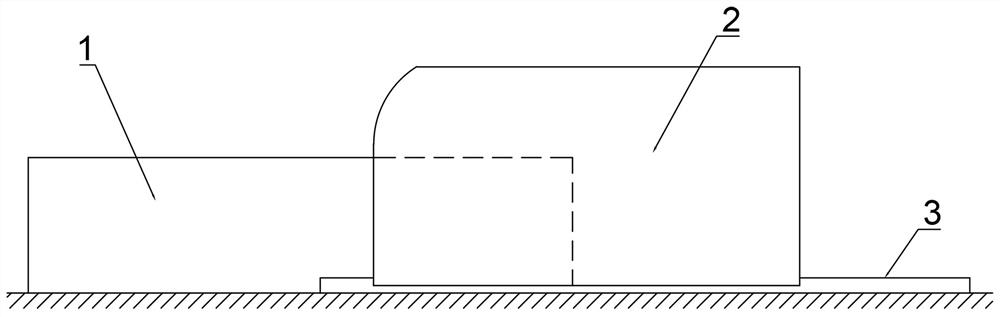
图1 为本发明的整体结构位置分布示意图;
图2 为本发明的机体内侧仰视结构示意图暨放射头位置分布示意图;
图3 为本发明的另一种实施例的放射头位置分布示意图;
图4 为本发明的转动台纵截面结构示意图;
图5 为图4中的滑动台纵截面结构示意图;
图6 为图5中的工作座结构示意图;
图7 为图5中的滑动座内侧凹面结构示意图;
图8 为图7的纵截面结构示意图;
图9 为本发明的手术床俯视图;
图10 为图9中的A-A截面结构示意图;
图11 为图9中的B-B截面结构示意图;
图12 为本发明的定位托(左)的俯视结构示意图。
图中:手术床1、放射运动机构2、轨道3、机体4、转动台5、齿盘6、齿轮7、第一伺服电机8、滑动台9、轨道10、滑动台螺杆11、工作座12、放射头13、凸环14、滑动座15、滚珠16、滑动凹槽17、伸缩杆18、第三伺服电机19、左侧胸部移动平台20、右侧胸部移动平台21、左侧腹部移动平台22、右侧腹部移动平台23、弹性布24、支撑台25、定位杆26、套管27、调节手轮28、腹部束缚件29、松紧带30、肋板31、胸横调节螺杆32、胸纵滑动块33、胸纵调节螺杆34、床体导轨35、腹纵滑动块36、腹纵调节螺杆37、腹横调节螺杆38、定位托39、弹性缓冲层40。
具体实施方式
以下结合说明书附图和具体优选的实施例对本发明作进一步描述,但并不因此而限制本发明的保护范围。
一种肺癌放疗肿瘤运动跟随方法,通过以下步骤来实现:
(1)扫描与重建:将患者固定后,利用CT扫描患者胸部,并通过软件来三维重建出电子三维模型,描绘出患者肺部的整体结构,以及肺部的肿瘤组织轮廓,然后建立时间轴,扫描出患者于时间轴上各时间点时的肿瘤组织靶组织的状态,即靶组织跟随肺部呼吸的运动趋势模型,再导入深度学习算法,得到上述靶组织的周期性变化的动态模型,作为治疗方案的依据;
(2)建立放射方案:以上述周期性变化的动态模型为基础,制定放射照射计划,模拟出时间轴上放射照射的位置、角度、剂量;
(3)固定患者体位:将患者放置到手术床上,通过调整手术固定机构,对患者进行定位,使患者体位与放射照射计划中模型的体位保持一致;
(4)放射跟随肿瘤运动:开启放射运动机构,使得放射头依据治疗计划的运动和工作方式进行运动和工作。
在上述过程中,周期性变化的动态模型的构建通过以下步骤来实现:
(1)构建基础模型:通过对若干患者的肺部组织进行扫描,构建出肺部组织通过呼吸运动而得到的肺部组织周期性变化基本模型;
(2)标记肺癌特征:CT扫描指定肺癌患者的肺部组织,识别肺癌肿瘤靶组织,并对图像中靶组织进行特征点标记;
(3)得到优化模型:将标记的特征点录入到肺部组织周期性变化基本模型中,得到指定肺癌患者的靶组织跟随呼吸运动的周期性变化的动态模型。
而在上述过程中,肺部组织周期性变化基本模型的构建,通过以下过程来实现:
(1)对患者A进行CT扫描,记录患者A的肺部组织呼吸运动的图像X
(2)建立xyz坐标系,使得上步骤的每个特征点均以三维坐标的形式来体现;
(3)按照相邻的时间节点,计算出相邻时间节点图像中,各个特征点的位移{Y
(4)以上述特征点坐标X和位移Y为基础,构建患者A的肺部组织呼吸运动的电子数据,生成相应的电子模型;
(5)更换患者B,重复上述过程,得到患者B的特征点坐标X和位移Y,并进一步得到各个特征点的位移的误差,记为Z;
(6)重复上述过程,根据正态分布得出误差Z的平均值和范围,根据需求记录误差Z的参考值范围作为阈值,分别将误差Z阈值与各组数据的位移Y进行比较,判断误差偏移量,记为精度,根据参考精度来判断新的患者数据是否符合精度要求,如果不符合,继续迭代来调整参考精度,如果符合则训练完成,即得到关于肺部组织周期性变化的基本模型。
在建立放射方案的环节中,放射照射计划的制定通过以下过程来实现:
(1)将放射头的工作区域引入到患者的肿瘤靶组织的周期性变化的动态模型中,对靶组织划区;
(2)根据靶区域单位区域的位置对多个放射头进行规划,制定放射照射灭杀该单位区域所需求的各放射头的位置、角度和强度;
(3)根据放射头的移动速度,对放射头的移动轨迹进行优化,并进一步对优化各时间节点各放射头的位置、角度和强度,优化完成,即为放射照射计划制定完成,录入计算机系统,手术开始时,放射头按照放射照射计划进行工作。
关于患者体位的定位和固定,结合图9-11所示的手术固定机构的结构,通过以下步骤来实现:
(1)准备:调整手术床1床侧的调节手轮28,使得左侧胸部移动平台20、右侧胸部移动平台21、左侧腹部移动平台22、右侧腹部移动平台23分别远离支撑台25,弹性布24张紧;
(2)粗调:患者躺在手术床1上后,患者抬起双臂,调节手术床1床侧的调节手轮28,使得左侧胸部移动平台20、右侧胸部移动平台21、左侧腹部移动平台22、右侧腹部移动平台23分别分别向支撑台25靠拢,直至腋窝定位件和腹部束缚件29靠近患者躯干,患者双臂自然放下至躯干两侧;
(3)精调:分别反复调整手术床1床侧的调节手轮28和手术床1床头的调节手轮28,使得腋窝定位件精准定位于患者腋下,腹部定位托39与患者第10肋和第11肋的左右侧相接触,以患者自然舒适为准;
(4)定位:设置松紧带30,松紧带30两端分别连接两侧腹部束缚件29,读出各处调节手轮28的读数,得出患者胸部上端宽度和胸骨下端宽度,然后通过胸部固定机构的定位杆26固定患者肩部、腹部固定机构的松紧带30固定患者腹部来实现对患者躯干的固定。
基于上述的肺癌放疗肿瘤运动跟随方法,涉及的肺癌放疗肿瘤运动跟随系统,包括放射运动机构和手术固定机构,在图1中,放射运动机构2设置在手术床1头部的一侧,沿手术床1的左右侧边前后移动,包括机体4,机体4通过轨道3设置在地面上,轨道3的布置方向与手术床1的布置方向一致,所述机体4的上部为半包围的隧道型结构,包围在手术床1的上方,内设放射头13和放射头运动机构,手术固定机构设置在手术床1的前半部,对患者的上半身进行调整和固定。
作为实施例1,如图2所示,放射头运动机构包括3个转动台5,转动台5呈品字形布置在手术床1的上方,并相互靠近,安装在机体4朝向手术床1的一面。
作为实施例2,如图3所示,放射头运动机构包括4个转动台5,转动台5呈正方形布置在手术床1的上方,并相互靠近,安装在机体4朝向手术床1的一面。
在图4中,转动台5的边缘处设为齿盘6,相对应的机体4上设置有与齿盘6啮合的齿轮7和第一伺服电机8,每个转动台5对应至少一个齿轮7和一个第一伺服电机8,转动台5朝向手术床1的一面为工作面,工作面为圆形,工作面上设置有贯穿中心的轨道10和在轨道10内自由移动的滑动台9,轨道10内侧设置有贯穿滑动台9的滑动台螺杆11,滑动台螺杆11通过第二伺服电机带动。
在图5中,滑动台9中空设置,中心嵌设有工作座12,工作座12一端开口,放射头13固定在工作座12的开口内,工作座12的中部通过万向球面结构与滑动台9内侧滑动连接,工作座12的另一端分别连接有至少三个伸缩杆18,伸缩杆18沿工作座12外壁呈辐射状均匀分布,伸缩杆18一端与工作座12连接,另一端连接到滑动台9内侧壁上,每根伸缩杆18通过第三伺服电机19带动调节;如图6-8所述,万向球面结构包括设置在工作座12侧壁的凸环14和设置在滑动台9内侧的滑动座15,滑动座15的内侧设置为凹面,且与凸环14的凸面相配合,凸环14的顶点处均匀设置有滚珠16,滚珠16沿凸环14的外径最大处周向分布,相对应的,滑动座15的内侧凹面均匀开设有长条形圆弧状的滑动凹槽17,滑动凹槽17的中心所在的平面与凸环14所在平面相垂直,滑动凹槽17与滚珠16一一对应。
在本发明中,手术固定机构包括胸部固定机构、腹部固定机构和支撑台25,支撑台25为长条形,设置在手术床1中间,支撑台25两端分别与手术床1的首尾两端相固定,其中,如图9和10所示,胸部固定机构包括左右相对布置的左侧胸部移动平台20和右侧胸部移动平台21,左侧胸部移动平台20和右侧胸部移动平台21分别位于支撑台25的左右两侧,左侧胸部移动平台20与右侧胸部移动平台21通过胸横调节螺杆32相连接,胸横调节螺杆32分别与左侧胸部移动平台20和右侧胸部移动平台21螺接,且胸横调节螺杆32与两侧胸部移动平台连接处的螺纹相反设置,胸横调节螺杆32穿过左侧胸部移动平台20和右侧胸部移动平台21的至少一侧,并于端头处设置调节手轮28,调节手轮28处设置有刻度盘。
在图9和11中,腹部固定机构包括左右相对布置的左侧腹部移动平台22和右侧腹部移动平台23,左侧腹部移动平台22和右侧腹部移动平台23分别位于支撑台25的左右两侧,左侧腹部移动平台22与右侧腹部移动平台23通过腹横调节螺杆38相连接,腹横调节螺杆38分别与左侧腹部移动平台22与右侧腹部移动23平台螺接,且腹横调节螺杆38与两侧腹部移动平台连接处的螺纹相反设置,腹横调节螺杆38穿过左侧腹部移动平台22和右侧腹部移动平台23的至少一侧,并于端头处设置调节手轮28,调节手轮28处设置有刻度盘。
支撑台25设置有沿手术床1首尾方向的胸纵调节螺杆34和腹纵调节螺杆37,以及分别与胸纵调节螺杆34和腹纵调节螺杆37相配合的胸纵滑动块33和腹纵滑动块36,支撑台25中部设置有分别供胸纵滑动块33和腹纵滑动块36自由滑动的空缺,胸纵调节螺杆34通过螺接穿过胸纵滑动块33并带动其在空缺内沿手术床1纵向自由滑动,腹纵调节螺杆37通过螺接穿过腹纵滑动块36并带动其在空缺内沿手术床1纵向自由滑动,胸横调节螺杆32穿过胸纵滑动块33并与之转动连接,腹横调节螺杆38穿过腹纵调节块36并与之转动连接;胸纵调节螺杆34穿过床头伸出,并于端头处设置调节手轮28,腹纵调节螺杆37穿过床头伸出,并于端头处设置调节手轮28,调节手轮28处均设置有刻度盘。
左侧胸部移动平台20、右侧胸部移动平台21、左侧腹部移动平台22、右侧腹部移动平台23的上平面均与支撑台25上平面平齐,并分别通过弹性布24与支撑台25连接,弹性布24下均匀设置若干条肋板31,肋板31的一端固定在支撑台25侧面,另一端分别与左侧胸部移动平台20、右侧胸部移动平台21、左侧腹部移动平台22、右侧腹部移动平台23滑动连接;左侧胸部移动平台20与左侧腹部移动平台22通过弹性布24连接,左侧胸部移动平台20和左侧腹部移动平台22分别与其相邻的床头/床尾通过弹性布24连接,相对应的,右侧胸部移动平台21与右侧腹部移动平台23通过弹性布24连接,右侧胸部移动平台21和右侧腹部移动平台23分别与其相邻的床头/床尾通过弹性布24连接;手术床1的下方设置有床体导轨35,床体导轨35与支撑台25相垂直,分别承托起胸部固定结构和腹部固定结构。
左侧胸部移动平台20及右侧胸部移动平台21上分别设置有腋窝定位件,如图10所示,两个腋窝定位件对称分布,腋窝固定件包括固定在两侧胸部移动平台上的套管27和在套管27内插接的L型的定位杆26,定位杆26的中部弯折部位圆滑过渡,定位杆26的一端空置,朝向床头方向,另一端为截面呈十字形的均匀柱形,插接到结构相匹配的套管27内。
左侧腹部移动平台22及右侧腹部移动平台23上分别设置有腹部束缚件29,如图11所示,两个腹部束缚件29对称分布,两个腹部束缚件29的上端通过可拆卸的松紧带30相连接,腹部束缚件29相对布置的一侧均设置有定位托39,如图12所示,定位托39为阶梯状,两侧定位托39靠近床头的一端之间的间距大于另一端,定位托39的中部平滑过渡,定位托39相对的一侧设置有弹性缓冲层40,定位托39分别与患者第10肋和第11肋的左右侧相接触,使得定位托39中部成为定位患者胸腔肋骨的标志。
另外,手术固定机构还包括肩部固定机构,肩部固定机构设置在胸部固定机构与床头之间,包括肩横调节螺杆,肩横调节螺杆穿过支撑件并与之转动连接,肩横调节螺杆的两端分别螺接有左侧肩部定位件和右侧肩部定位件,且肩横调节螺杆与两侧肩部定位件的螺纹方向相反,肩横调节螺杆的端头处设置有调节手轮,调节手轮处设置有刻度盘,左侧肩部定位件和右侧肩部定位件为相对布置的弯折板件,其中左侧肩部定位件的横截面为厂字形,右侧肩部定位件的横截面为对称的形状。肩部固定机构应用于患者的定位固定时,通过转动调节手轮使得左侧肩部定位件和右侧肩部定位件相互远离,患者躺好后,转动调节手轮使得左侧肩部定位件和右侧肩部定位件相互远离,直至左侧肩部定位件和右侧肩部定位件扣在患者的左右肩部,以患者自然舒适为准,即实现了与胸部固定机构、腹部固定机构相配合,对患者进行有效的定位固定。
通过上述流程步骤和结构可以发现,本发明实现了患者手术体位的定位固定,实现了对放射头的极致调节,两者配合,进而实现了对放射头患者肺癌肿瘤呼吸运动的快速精准有效的跟踪指向,处理速度快,放射照射效率高,辐射带来的副反应少,自动化程度高,效果显著。
- 一种肺癌放疗肿瘤运动跟随系统及方法
- 一种患者体表和体内肿瘤运动相关性及肿瘤内部动度的预测方法和系统