一种车祸后的逃生模拟系统及其控制方法
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及安全教育设备领域,具体涉及一种车祸后的逃生模拟系统及其控制方法。
背景技术
当因为某些意外发生车祸时,车辆极有可能撞向墙壁、护栏,甚至发生翻滚。在这种突发事项及外力影响的共同作用下,车祸发生后的很长一段时间里,驾驶员可能都处于头脑一片空白的情况。但是在车祸发生后驾驶员能够迅速检查自身并及时逃走,很大程度上关系着驾驶员的生命安全。而在紧急情况下,人们往往会慌慌张张,不知所措,极有可能做出错误的操作。而这些错误的操作,在很大程度上将导致驾驶员耽误逃生时机,最终导致悲剧的发生。
那么要如何避免这种悲剧的发生呢?平常的安全教育显然是一种性价比很高的方案。但是现有的关于车祸后如何处理的安全教育还仅仅停留在老师讲解的程度,并没有专门的安全教育设备能够模拟车祸发生后的各种情况。这导致这种安全教育的效果极差,学员们往往学过后边忘在脑后,不能形成身体记忆,遇到突发状况时仍不知如何去做。
因此,本发明公开了一种车祸后的逃生模拟系统及其控制方法以解决现有技术存在的不足。
发明内容
为解决现有技术存在的不足,本发明提供了一种车祸后的逃生模拟系统及其控制方法。
本发明的技术方案为:
本发明提供了一种车祸后的逃生模拟系统,包括底座、通过支架可转动的固定在所述底座上的翻滚模块、通过竖直转轴可旋转的固定在所述翻滚模块上且侧壁上设置有门的滚球模块。所述滚球模块包括滚球本体和设置在所述滚球本体内部的底板、可滑动的设置在所述底板上的座椅子模块、设置在所述底板上且踏面均设置有压力传感器的油门与刹车、模拟驾驶台、可旋转的设置在所述模拟驾驶台上并与角度传感器相连的方向盘、设置在所述模拟驾驶台上方的曲面显示器、设置在所述滚球本体顶部且与所述竖直转轴相连的旋转子模块、若干摄像头。
进一步,所述支架设置为“人”字形。
进一步,所述翻滚模块包括翻滚电机、主动齿轮、从动齿环、环形固定架、水平转轴。
进一步,所述滚球模块还包括阻力子模块。
进一步,所述阻力子模块包括“n”字形固定摩擦柱、摩擦支架、固定摩擦板、摩擦气缸、滑动摩擦板。
进一步,所述座椅子模块包括底部设置有滑块的座椅本体、滑道、滑动气缸、设置有接触开关的安全带。
进一步,所述旋转子模块包括固定支架、旋转电机。
进一步,还包括控制系统,所述控制系统包括PC主机、显示屏。
一种车祸后的逃生模拟系统的控制方法,包括以下步骤:
S1.初始参数设置,通过控制系统设置初始参数,进行初始化;
S2.准备工作,参与者进入滚球本体,并系好安全带;
S3.车祸模拟,根据初始参数,翻滚模块与滚球模块开始进行不同程度转动,模拟车祸后车辆的打摆、撞击、翻滚情况;座椅子模块与阻力子模块进行相应动作,模拟车祸后车辆的损坏程度;同时,曲面显示器播放相应画面;
S4.操作评分,操作人员根据摄像头拍摄的画面、各种传感器的监测数据对参与者进行打分;
S5.总结,参与者根据评分评价进行总结,并重复S2~S4,直至面对车祸时,能够平稳准确的应对。
进一步,所述初始参数包括车祸翻滚程度、车辆损坏程度、逃生时间。
本发明所达到的有益效果为:
本发明的翻滚模块与滚球模块可以模拟车祸后车辆的打摆、撞击、翻滚等情况,座椅子模块与阻力子模块可以模拟车祸后车辆的损坏程度,而曲面显示器又可以播放相应画面。本发明从多个维度模拟车祸后车辆的各种情况,尽最大可能完善车祸时的车辆情况,使得参与者能够最大程度的投入。以此获得参与者面临车祸时的真实反映,使得参与者能够在最接近车祸的情况下,不断训练突破自己,直至形成肌肉记忆。这样才能够保证参与者在面临危险请款下,能够应对得当,增加活命的几率。
附图说明
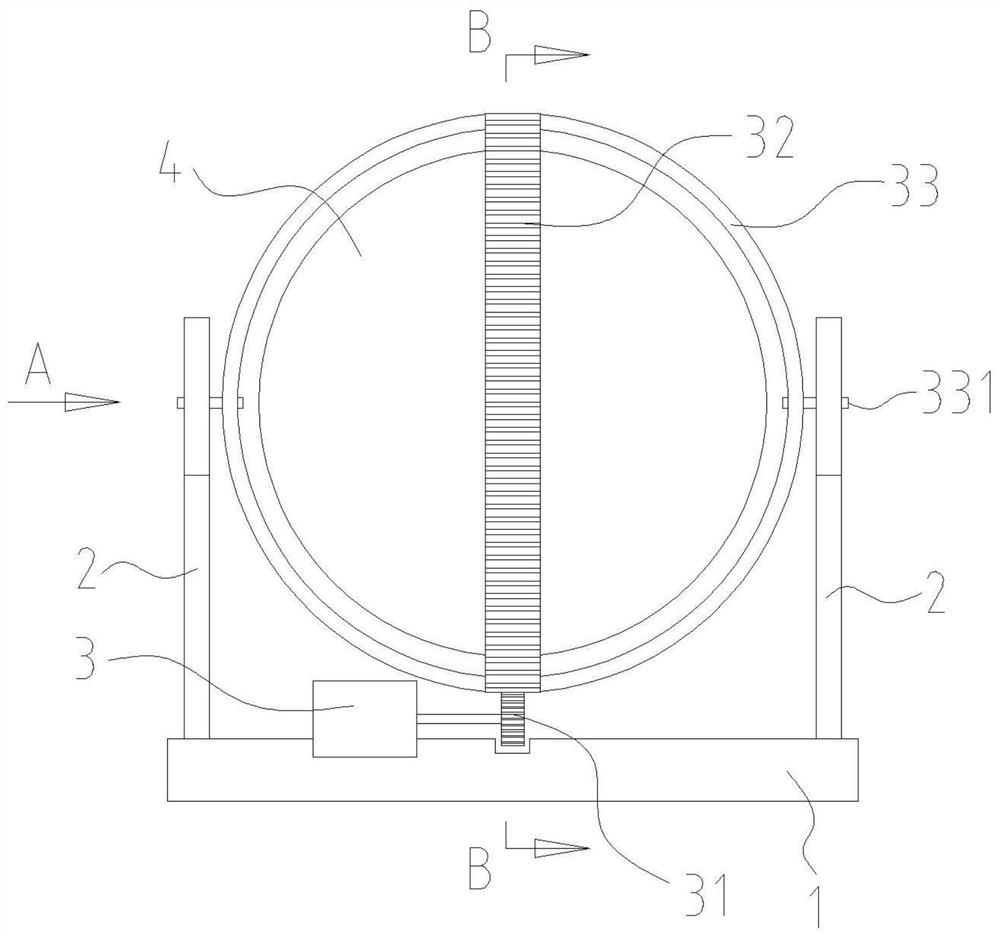
图1是本发明主视图。
图2是图1中A向视图。
图3是图1中B-B剖视图。
图4是安全带局部放大图。
图5是图2中C处放大图。
图6是本发明控制方法图。
图中,1、底座;2、支架;3、翻滚电机;31、主动齿轮;32、从动齿环;33、环形固定架;331、水平转轴;4、滚球本体;41、竖直转轴;42、门;421、固定摩擦柱;422、摩擦支架;423、固定摩擦板;424、摩擦气缸;425、滑动摩擦板;43、底板;44、座椅本体;441、滑道;442、滑动气缸;443、安全带;4431、接触开关;45、油门;46、刹车;47、模拟驾驶台;471、方向盘;48、曲面显示器;49、固定支架;491、旋转电机;50、摄像头。
具体实施方式
为便于本领域的技术人员理解本发明,下面结合附图说明本发明的具体实施方式。
如图1~6所示,本发明提供了一种车祸后的逃生模拟系统,包括控制系统、底座1、通过支架2可转动的固定在所述底座1上的翻滚模块、通过竖直转轴41可旋转的固定在所述翻滚模块上且侧壁上设置有门42的滚球模块。为了支撑的更稳、更安全,所述支架2设置为“人”字形。
所述翻滚模块包括设置在所述底座1上的翻滚电机3、与所述翻滚电机3输出轴相连的主动齿轮31、从动齿环32、环形固定架33、水平转轴331。所述环形固定架33与从动齿环32均为圆环形,所述环形固定架33与从动齿环32垂直交叉,所述环形固定架33通过水平转轴331可旋转的固定在所述支架2上。所述从动齿环32的外侧设置有轮齿,所述从动齿环32与所述主动齿轮31相互咬合,所述从动齿环32可以在所述主动齿轮31的带动下以水平转轴331为轴心转动。
所述滚球模块包括滚球本体4、阻力子模块和设置在所述滚球本体4内部的底板43、可滑动的设置在所述底板43上的座椅子模块、设置在所述底板43上且踏面均设置有压力传感器的油门45与刹车46、模拟驾驶台47、可旋转的设置在所述模拟驾驶台47上并与角度传感器相连的方向盘471、设置在所述模拟驾驶台47上方的曲面显示器48、设置在所述滚球本体4顶部且与所述竖直转轴41相连的旋转子模块、若干摄像头50。所述油门45与刹车46均可转动,其上的压力传感器可以检测参与者的踩踏力度、踩踏时间,进而控制系统便可推断出参与者踩踏油门45或刹车46时的急重轻缓。而与方向盘471相连的角度传感器则可检测到方向盘471的转动角度,进而推算出车辆的变化。根据这些监控数据,控制系统便可以控制本发明的各个运动部件做出相应动作,同时也会控制曲面显示器48播放相应画面,使得本发明能够更好的模拟车祸时车辆的反应。
进一步,所述阻力子模块包括“n”字形固定摩擦柱421、摩擦支架422、固定摩擦板423、摩擦气缸424、滑动摩擦板425。所述固定摩擦柱421一端固定在所述门42上,另一端悬空。所述摩擦支架422固定在所述滚球本体4的外壳上,所述固定摩擦板423与摩擦气缸424固定在所述摩擦支架422上,所述滑动摩擦板425设置在所述摩擦气缸424的活塞杆上,所述滑动摩擦板425可在摩擦气缸424的活塞杆作用下沿摩擦支架422滑动。所述固定摩擦柱421的悬空端设置在所述滑动摩擦板425与固定摩擦板423之间并与固定摩擦板423贴合,所述固定摩擦柱421的悬空端、滑动摩擦板425、固定摩擦板423均为高摩擦力材料。本发明控制系统可以控制摩擦气缸424的活塞杆伸缩,进而控制滑动摩擦板425与固定摩擦板423对固定摩擦柱421的悬空端的挤压程度,以此增加或减少固定摩擦柱421的悬空端和滑动摩擦板425与固定摩擦板423的摩擦力,以此模拟在不同程度的车祸情况下,车门42的变形情况。车辆损坏越严重,门42越越不容易被打开。
进一步,所述座椅子模块包括底部设置有滑块的座椅本体44、设置在所述底板43上的滑道441、设置在所述滚球本体4上的且活塞杆与所述座椅本体44背部相连的滑动气缸442、设置在座椅本体44上且设置有接触开关4431的安全带443。所述滑块与所述滑道441相配,所述座椅本体44可以在所述滑动气缸442的作用下沿滑道441前后滑动,以此模拟车辆受撞击后的变形情况。比如说,车祸严重,那么车辆肯定也变形严重,驾驶员的大腿很厚可能被卡主,这种情况对应着滑动气缸442活塞杆伸出,座椅本体44与模拟驾驶台47之间的间距减少。
进一步,所述旋转子模块包括固定在滚球本体4顶部的固定支架49、设置在所述固定支架49上得旋转电机491,所述旋转电机491的输出轴与所述竖直转轴41相连。当旋转电机491旋转时,整个滚球本体4都将以竖直转轴41为轴心转动。
所述控制系统包括PC主机、显示屏,所述PC主机与所述压力传感器、角度传感器、旋转电机491、翻滚电机3、摩擦气缸424、滑动气缸442、显示屏相连,用来设置本发明的一切参数,也用来控制本发明各运动部件的动作。
一种车祸后的逃生模拟系统的控制方法,包括以下步骤:
S1.初始参数设置,通过控制系统设置初始参数,进行初始化;所述初始参数包括车祸翻滚程度、车辆损坏程度、逃生时间;
S2.准备工作,参与者进入滚球本体4,并系好安全带443;
S3.车祸模拟,根据初始参数,翻滚模块与滚球模块开始进行不同程度转动,模拟车祸后车辆的打摆、撞击、翻滚情况;座椅子模块与阻力子模块进行相应动作,模拟车祸后车辆的损坏程度;同时,曲面显示器48播放相应画面;
S4.操作评分,操作人员根据摄像头50拍摄的画面、各种传感器的监测数据对参与者进行打分;
S5.总结,参与者根据评分评价进行总结,并重复S2~S4,直至面对车祸时,能够平稳准确的应对。
以上所述的本发明实施方式,并不构成对本发明保护范围的限定。任何在本发明的精神和原则之内所作的修改、等同替换和改进等,均应包含在本发明的权利要求保护范围之内。
- 一种车祸后的逃生模拟系统及其控制方法
- 一种车祸后的逃生模拟系统