一种全息立体空间成像方法、装置及系统
文献发布时间:2023-06-19 10:32:14
技术领域
本发明涉及成像技术领域,尤其是一种全息立体空间成像装置。
背景技术
周知,我们虽然能观察到遥远环境的图像和视频,但是我们观察的角度是由拍摄者的角度所固定的。就如我们观察一张风景图片,如果近处的物体比较清晰,那么远处的景物一定是模糊的。一个人,如果我们只从后面拍摄,就只能看到其背影,如果物体拍摄距离是五米,我们就无法看到一米处的真实效果;再者,我们听的音乐,为了更好的享受效果,已经从单声道发展到5.1声道的环绕立体效果,使音乐享受更加有真实感和临场感。而图像视频,任然只有单一的画面,虽然现在视频图像的分辨率更高,更细腻,但终究只是一个平面图像,没有纵深感。虽然现在已经有立体图像和视频技术,但基本是计算机模拟计算出来的,真实效果并不理想。
发明内容
针对上述现有技术存在的不足,本实用发明的目的在于提供一种全息立体空间成像装置。
为了实现上述目的,本实用发明采用的第一个技术方案如下:
一种全息立体空间成像方法,它包括步骤:
S1、对同一目标范围的不同距离的目标通过成像物镜同时进行成像;
S2、利用棱镜分光的方式取出成像物镜所成的不同距离的目标图像;
S3、将不同距离的目标图像分别照射到对应传感器上。本发明采用的第二个技术方案如下:
一种全息立体空间成像装置,它包括依次排列的远距目标、中距目标、近距目标、成像物镜和三分光棱镜,所述三分光棱镜位于成像物镜的出光侧,所述三分光棱镜的一侧设置有远距传感器,所述三分光棱镜的另一侧设置有中距传感器,所述三分光棱镜的相对于其他上述两侧外的一侧安装有设置有近距传感器,所述成像物镜获取远距目标的远距物光并成像到成像物镜的出光侧,所述成像物镜获取中距目标的中距物光并成像到成像物镜的出光侧,所述成像物镜获取近距目标的近距物光并成像到成像物镜的出光侧,所述三分光棱镜将混合有远距目标、中距目标、近距目标所成的像分别折射到远距传感器、中距传感器和近距传感器上。
优选地,所述远距传感器与三分光棱镜的距离为第一距离,所述中距传感器与三分光棱镜的距离为第二距离,所述近距传感器与三分光棱镜的距离为第三距离,所述第一距离小于第二距离,所述第二距离小于第三距离。
本发明采用的第三个技术方案如下:
一种全息立体空间成像系统,它包括左成像系统和右成像系统,所述左成像系统和右成像系统均包括权利要求1-2任一项所述的全息立体空间成像装置。
由于采用了上述方案,本实用发明利用成像物镜配合三分光棱镜,对同一观察环境目标范围的不同距离同时成像,通过传感器使得可将拍摄的整个空间图型信息进行记录,可以再现拍摄环境中不同远近,不同角度的任意角度的画面和图像,使整个观察范围内任意观察距离都真实和清晰,打破了拍摄者的拍摄距离和角度限制,其结构简单紧凑,具有很强的实用价值和市场推广价值。
附图说明
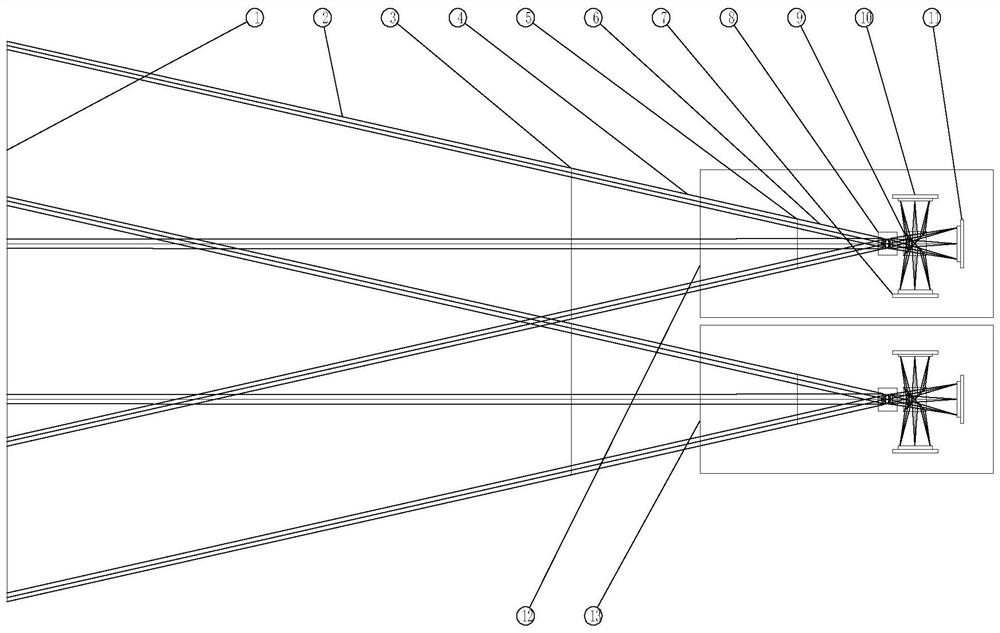
图1是本实用发明实施例的光线传播示意图。
具体实施方式
以下结合附图对本实用发明的实施例进行详细说明,但是本实用发明可以由权利要求限定和覆盖的多种不同方式实施。
如图1所示,本实施例提供的一种全息立体空间成像方法,它包括步骤:
S1、对同一目标范围的不同距离的目标通过成像物镜8同时进行成像;
S2、利用棱镜分光的方式取出成像物镜所成的不同距离的目标图像;
S3、将不同距离的目标图像分别照射到对应传感器上。
具体的实施例如下:
S1、对同一目标范围的远距目标1、中距目标3和近距目标5通过成像物镜8进行成像;
S2、利用棱镜分光的方式取出成像物镜所成的远距目标1、中距目标3 和近距目标5三幅目标图像;
S3、将远距目标1、中距目标3和近距目标5三幅目标图像分别照射到对应传感器上。
基于此,通过成像物镜8对目标进行成像,利用棱镜分光将混合的目标图像分开,在传感器的配合下实现可显示不同距离远近的图像;使整个观察范围内任意观察距离都真实和清晰,打破了拍摄者的拍摄距离和角度限制。
基于前述方案,结合图1所示,本发明实施例还提供一种全息立体空间成像装置。它包括依次排列的远距目标1、中距目标3、近距目标5、成像物镜8和三分光棱镜9,所述三分光棱镜9位于成像物镜8的出光侧,所述三分光棱镜9的一侧设置有远距传感器10,所述三分光棱镜9的另一侧设置有中距传感器11,所述三分光棱镜9的相对于其他上述两侧外的一侧安装有设置有近距传感器7,所述成像物镜8获取远距目标1的远距物光2并成像到成像物镜8的出光侧,所述成像物镜8获取中距目标3的中距物光4并成像到成像物镜8的出光侧,所述成像物镜8获取近距目标5的近距物光6并成像到成像物镜8的出光侧,所述三分光棱镜9将混合有远距目标1、中距目标3、近距目标5所成的像分别折射到远距传感器10、中距传感器11和近距传感器 7上。
同一目标范围的环境因距离远近不同分为远距目标1、中距目标3和近距目标5三段,并将远距目标1的远距物光2;中距目标3的中距物光4;近距目标5的近距物光6同时入射到成像物镜8;
远距物光2、中距物光4、近距物光6经成像物镜8后,同时成像到成像物镜8的后面,由于三幅目标图像同时叠加在成像物镜8后面,远距目标1 成像距离最近,近距目标5成像距离最远,而中距目标3成像距离在两者之间;
由于远、中、近三段目标成像在同一光轴,用图像传感器拾取图像时,空间位置相互影响,不能同时采集图像。所以在成像物镜8后面设计三分光棱镜9。三分光棱镜9将混合有远、中、近三段目标所成的像从同轴叠加状态分成三路能量相等的非同轴图像。
基于此,本实用发明对同一目标范围的远距目标1、中距目标3和近距目标5通过成像物镜8成像,远距目标1、中距目标3和近距目标5成像后的像通过三分光棱镜9将原本混合在一起的像分开,三分光棱镜9的外侧的远距传感器10、中距传感器11和近距传感器7分别获取远距目标1、中距目标3 和近距目标5的像,成像物镜8配合三分光棱镜9,对同一观察环境目标范围的不同距离同时成像,通过传感器使得可将拍摄的整个空间图型信息进行记录,可以再现拍摄环境中不同远近,不同角度的任意角度的画面和图像,使整个观察范围内任意观察距离都真实和清晰,打破了拍摄者的拍摄距离和角度限制。
所述远距传感器10与三分光棱镜9的距离为第一距离,所述中距传感器 11与三分光棱镜9的距离为第二距离,所述近距传感器7与三分光棱镜9的距离为第三距离,所述第一距离小于第二距离,所述第二距离小于第三距离;调整传感器与三分光棱镜9的相对距离,即可同时采集到远、中、近三段目标所成图像。
基于前述方案,结合图1所示,本发明实施例还提供一种全息立体空间成像系统,它包括左成像系统12和右成像系统13,所述左成像系统12和右成像系统13均包括权利要求1-2任一项所述的全息立体空间成像装置它包括左成像系统12和右成像系统13,保证视频图像拍摄更适合于人类观察,保证环境的立体空间和距离感;当然,将全息立体空间成像系统按三轴双向分布排列,可实现对环境目标的360度全息空间拍摄记录。
- 一种全息立体空间成像方法、装置及系统
- 一种空间立体成像装置及成像方法