税务UKey自助发行领取装置及控制方法
文献发布时间:2023-06-19 10:38:35
技术领域
本发明涉及税务技术领域,具体而言,涉及一种税务UKey自助发行领取装置及控制方法。
背景技术
目前,小规模纳税人可以按需选择税控Ukey和税控盘进行发票开具,而税务Ukey是由税局免费发放,这样就给税局服务带来了很多新的工作,并且每个公司的税务UKey的形状大小各不相同,领取时需要加以区分,增大了税务人员的工作压力,另外还加大了税务局、自助办税大厅、银行、超市、企业园区的人员量、排队时间和等待时间。
发明内容
鉴于此,本发明提出了一种税务UKey自助发行领取装置,旨在解决现有技术中税务UKey领取时易增大税务人员工作压力并浪费时间的问题。本发明还提出了一种税务UKey自助发行领取装置的控制方法。
一个方面,本发明提出了一种税务UKey自助发行领取装置,该装置包括:壳体,壳体开设有出盘口;支撑架,设置于壳体内,支撑架对应于出盘口处设置有承载台;储盘仓,设置于支撑架,用于存放税务UKey;位置调节装置,设置于支撑架;夹取机构,设置于位置调节装置;控制装置,与位置调节装置和夹取机构均连接,用于接收领取信息,并根据领取信息控制位置调节装置移动至税务UKey处,并控制夹取机构夹取税务UKey,以及在夹取后控制位置调节装置移动至出盘口处,并控制夹取机构松开税务UKey以掉落至承载台。
进一步地,上述税务UKey自助发行领取装置中,储盘仓设置有UKey盘存储区域和帽体存取区域;控制装置还用于根据领取信息控制位置调节装置移动至UKey盘存储区域处,并控制夹取机构夹取税务UKey,在夹取后控制位置调节装置移动至帽体存取区域处并使税务UKey插设于对应的帽体,以及控制位置调节装置移动至出盘口处。
进一步地,上述税务UKey自助发行领取装置中,位置调节装置包括:第一移动机构,设置于支撑架且与控制装置相连接,以在控制装置的控制下沿壳体的长度方向移动;第二移动机构,设置于第一移动机构且与控制装置相连接,以在控制装置的控制下沿壳体的宽度方向移动;第三移动机构,设置于第二移动机构且与控制装置相连接,以在控制装置的控制下沿壳体的高度方向移动;夹取机构设置于第三移动机构。
进一步地,上述税务UKey自助发行领取装置中,第一移动机构包括:第一同步带,沿壳体的长度方向可转动地设置于支撑架,第二移动机构与第一同步带相连接;第一驱动机构,设置于支撑架且与第一同步带和控制装置均连接,用于在控制装置的控制下驱动第一同步带转动,进而带动第二移动机构移动。
进一步地,上述税务UKey自助发行领取装置中,第一移动机构还包括:第一滑轨,设置于支撑架且与第一同步带并列设置,第二移动机构可滑动地设置于第一滑轨。
进一步地,上述税务UKey自助发行领取装置中,第一移动机构还包括:两个第一检测装置,沿壳体长度方向间隔地设置于支撑架,每个第一检测装置均用于检测第二移动机构;控制装置与两个第一检测装置均电性连接,用于在任意一个第一检测装置检测到第二移动机构时控制第一驱动机构停止驱动。
进一步地,上述税务UKey自助发行领取装置中,第二移动机构包括:支架,与第一同步带相连接;第二同步带,沿壳体的宽度方向可转动地设置于支架,第三移动机构与第二同步带相连接;第二驱动机构,设置于支架且与第二同步带和控制装置均连接,用于在控制装置的控制下驱动第二同步带转动,进而带动第三移动机构移动。
进一步地,上述税务UKey自助发行领取装置中,第二移动机构包括:第二滑轨,设置于支架且与第二同步带并列设置,第三移动机构可滑动地设置于第二滑轨。
进一步地,上述税务UKey自助发行领取装置中,第二移动机构还包括:两个第二检测装置,沿壳体宽度方向间隔地设置于支架,每个第二检测装置均用于检测第三移动机构;控制装置与两个第二检测装置均电性连接,用于在任意一个第二检测装置检测到第三移动机构时控制第二驱动机构停止驱动。
进一步地,上述税务UKey自助发行领取装置中,第三移动机构包括:支座架,与第二同步带相连接;第三同步带,沿壳体的高度方向可转动地设置于支座架,夹取机构与第三同步带相连接,第三驱动机构,设置于支座架且与第三同步带和控制装置均相连接,用于在控制装置的控制下驱动第三同步带转动,进而带动夹取机构移动。
进一步地,上述税务UKey自助发行领取装置中,第三移动机构包括:第三滑轨,设置于支座架且与第三同步带并列设置,夹取机构可滑动地设置于第三滑轨。
进一步地,上述税务UKey自助发行领取装置中,第三移动机构还包括:两个第三检测装置,沿壳体高度方向间隔地设置于支座架,每个第三检测装置均用于检测夹取机构;控制装置与两个第三检测装置均电性连接,用于在任意一个第三检测装置检测到夹取机构时控制第三驱动机构停止驱动。
进一步地,上述税务UKey自助发行领取装置中,夹取机构包括:支座,与第三同步带相连接;丝杠,设置有两个螺纹方向相反的螺纹段;两个夹爪,其第一端分别与两个螺纹段一一对应地相螺接,其第二端用于夹取税务UKey;第四驱动机构,与丝杠和控制装置均相连接,用于在控制装置的控制下驱动丝杠转动使得两个夹爪靠近或者远离。
进一步地,上述税务UKey自助发行领取装置中,夹取机构还包括:第四滑轨,设置于支座且与丝杠并列设置,两个夹爪的第一端均设置有延伸部,两个延伸部均可滑动地设置于第四滑轨,以限制两个夹爪的移动方向。
进一步地,上述税务UKey自助发行领取装置中,夹取机构还包括:第四检测装置,设置于支座的预设位置;控制装置与第四检测装置电性连接,用于在第四检测装置检测到夹爪时控制第四驱动机构停止驱动。
本发明中,储盘仓内存放税务UKey,控制装置控制位置调节装置移动至税务UKey处,夹取机构夹取税务UKey,并在夹取后位置调节装置移动至出盘口处,夹取机构松开税务UKey即可从出盘口处取出税务UKey,简单方便,实现了自动领取税务UKey,无需税务人员分发,减小了税务人员的工作压力,并节省了领取税务UKey的时间,解决了现有技术中税务UKey领取时易增大税务人员工作压力并浪费时间的问题,该装置能够为各种形状大小的税务UKey发售提供可靠、稳定地运行,保证顺利完成税务UKey的领取和发售。
另一方面,本发明还提出了一种税务UKey自助发行领取装置的控制方法,该方法包括如下步骤:接收税务UKey的领取信息;根据领取信息控制位置调节装置移动至税务UKey的存放处;控制夹取机构夹取税务UKey;控制位置调节装置移动至出盘口处;控制夹取机构松开税务UKey以使税务UKey掉落至出盘口处。
由于税务UKey自助发行领取装置具有上述效果,所以税务UKey自助发行领取装置的控制方法也具有相应的技术效果。
附图说明
通过阅读下文优选实施方式的详细描述,各种其他的优点和益处对于本领域普通技术人员将变得清楚明了。附图仅用于示出优选实施方式的目的,而并不认为是对本发明的限制。而且在整个附图中,用相同的参考符号表示相同的部件。在附图中:
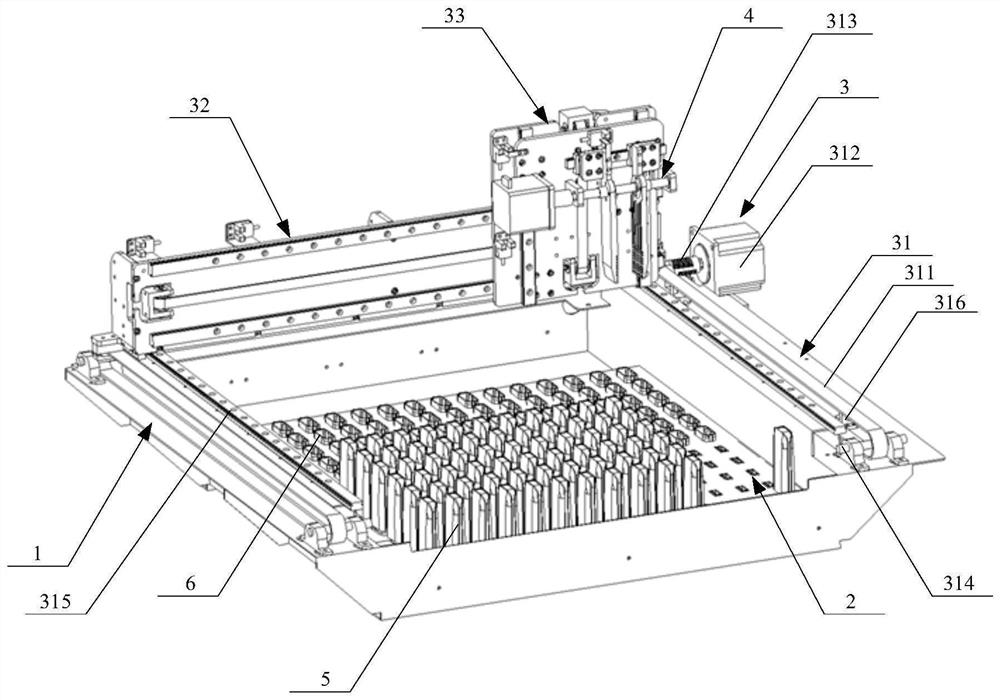
图1为本发明实施例提供的税务UKey自助发行领取装置的结构示意图;
图2为本发明实施例提供的税务UKey自助发行领取装置中,第二移动机构的结构示意图;
图3为本发明实施例提供的税务UKey自助发行领取装置中,第二移动机构的另一侧结构示意图;
图4为本发明实施例提供的税务UKey自助发行领取装置中,第三移动机构的结构示意图;
图5为本发明实施例提供的税务UKey自助发行领取装置中,第三移动机构的另一侧结构示意图;
图6为本发明实施例提供的税务UKey自助发行领取装置中,夹取税务UKey过程的结构示意图;
图7为本发明实施例提供的税务UKey自助发行领取装置中,夹取税务UKey的结构示意图;
图8为本发明实施例提供的税务UKey自助发行领取装置中,第三移动机构移动过程的结构示意图;
图9为本发明实施例提供的税务UKey自助发行领取装置中,第一移动机构移动过程的结构示意图;
图10为本发明实施例提供的税务UKey自助发行领取装置中,税务UKey插接帽体的结构示意图;
图11为本发明实施例提供的税务UKey自助发行领取装置中,税务UKey插好帽体后移动过程的结构示意图;
图12为本发明实施例提供的税务UKey自助发行领取装置的控制方法的流程图。
具体实施方式
下面将参照附图更详细地描述本公开的示例性实施例。虽然附图中显示了本公开的示例性实施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。下面将参考附图并结合实施例来详细说明本发明。
装置实施例:
参见图1至图11,图中示出了本实施例中税务UKey自助发行领取装置的优选结构。如图所示,税务UKey自助发行领取装置包括:壳体(图中未示出)、支撑架1、储盘仓2、位置调节装置3、夹取机构4和控制装置。其中,壳体开设有出盘口,支撑架1设置于壳体的内部,支撑架1对应于出盘口处设置有承载台。储盘仓2设置于支撑架1,储盘仓2用于存放税务UKey5。
参见图1、图6至图11,位置调节装置3设置于支撑架1,夹取机构4设置于位置调节装置3,控制装置与位置调节装置3和夹取机构4均相连接,控制装置用于接收领取信息,并根据领取信息控制位置调节装置3移动至税务UKey5处,再控制夹取机构4夹取税务UKey5,以及在夹取税务UKey5后控制位置调节装置3移动至出盘口处,再控制夹取机构4松开税务UKey5,以使税务UKey5掉落至承载台上。
具体使用时,由于承载台与出盘口相对应,所以领取人可以从出盘口处取出税务UKey。并且,在税务UKey取走之后,位置调节装置3和夹取机构4均回复原位,等待下次的领取任务。
具体实施时,该装置可以设置有输入装置,输入装置用于输入领取信息,输入装置与控制装置电性连接,控制装置接收输入装置输入的领取信息。工作人员可以操控输入装置输入领取信息。
可以看出,本实施例中,储盘仓2内存放税务UKey,控制装置控制位置调节装置3移动至税务UKey处,夹取机构4夹取税务UKey,并在夹取后位置调节装置3移动至出盘口处,夹取机构4松开税务UKey即可从出盘口处取出税务UKey,简单方便,实现了自动领取税务UKey,无需税务人员分发,减小了税务人员的工作压力,并节省了领取税务UKey的时间,解决了现有技术中税务UKey领取时易增大税务人员工作压力并浪费时间的问题,该装置能够为各种形状大小的税务UKey发售提供可靠、稳定地运行,保证顺利完成税务UKey的领取和发售。
参见图1、图6至图11,上述实施例中,储盘仓2设置有UKey盘存储区域和帽体存取区域,UKey盘存储区域存放多个税务UKey5,税务UKey5可以为各种样式、各种大小。帽体存取区域存放多个帽体6,每个帽体6均有一个相对应的税务UKey5。
控制装置还用于根据领取信息控制位置调节装置3移动至UKey盘存储区域处,并控制夹取机构4夹取税务UKey5,在夹取税务UKey5后控制位置调节装置3移动至帽体存取区域处,再控制位置调节装置3向该税务UKey对应的帽体6处移动,使得税务UKey插设于对应的帽体6,以及,在插设帽体6后,控制装置控制位置调节装置3移动至出盘口处,再控制夹取机构4松开盖好了帽体6的税务UKey以使其掉落至承载台。
参见图2至图5,上述实施例中,位置调节装置3可以包括:第一移动机构31、第二移动机构32和第三移动机构33。其中,第一移动机构31设置于支撑架1,并且,第一移动机构31与控制装置相连接,第一移动机构31用于在控制装置的控制下沿壳体的长度方向移动。具体地,壳体的长度方向即为支撑架1的长度方向,支撑架1的长度方向为图1中垂直于纸面的方向。
第二移动机构32设置于第一移动机构31,并且,第二移动机构32与控制装置相连接。第二移动机构32用于在控制装置的控制下沿壳体的宽度方向移动,壳体的宽度方向即为支撑架1的宽度方向,支撑架1的宽度方向为图1中由左至右的方向。
第三移动机构33设置于第二移动机构32,并且,第三移动机构33与控制装置相连接。第三移动机构33用于在控制装置的控制下沿壳体的高度方向移动,壳体的高度方向即为支撑架1的高度方向,支撑架1的高度方向为图1中由上至下的方向。
夹取机构4设置于第三移动机构33,具体地,第一移动机构31沿支撑架1的长度方向移动,带动第二移动机构32、第三移动机构33和夹取机构4一起沿支撑架1的长度方向移动。第二移动机构32沿支撑架1的宽度方向移动,带动第三移动机构33和夹取机构4一起沿支撑架1的宽度方向移动。第三移动机构33沿支撑架1的高度方向移动,带动夹取机构4沿支撑架1的高度方向移动,这样,夹取机构4可沿支撑架1的长度方向、宽度方向和高度方向任意移动。
可以看出,本实施例中,位置调节装置3能够带动夹取机构4沿支撑架1长度方向、宽度方向和高度方向任意移动,从而使得夹取机构4可移动至对应的税务UKey处进而夹取税务UKey,并可插设帽体6,进而将插设帽体6后的税务UKey移动至承载台处,便于从出盘口处取出税务UKey,结构简单,便于实施。
参见图1,上述实施例中,第一移动机构31可以包括:第一同步带311和第一驱动机构。其中,第一同步带311可转动地设置于支撑架1,第一同步带311是沿壳体的长度方向设置,即第一同步带311沿支撑架1的长度方向转动。第二移动机构32与第一同步带311相连接,则第一同步带311的转动带动了第二移动机构32的转动。
第一驱动机构设置于支撑架1,并且,第一驱动机构与第一同步带311和控制装置均连接,第一驱动机构用于在控制装置的控制下驱动第一同步带311转动,进而带动第二移动机构32沿支撑架1的长度方向移动。
具体实施时,第一驱动机构可以包括:第一电机312、第一联轴器313、多个第一同步轮314和多个第一同步轮座。第一电机312和各第一同步轮座均设置于支撑架1,各第一同步轮314与各第一同步轮座一一对应,每个第一同步轮314均可转动地设置于对应的第一同步轮座,第一电机312的驱动端与第一联轴器313相连接,第一联轴器313与其中一个第一同步轮314连接,第一同步带311绕设于各第一同步轮314,第一电机312通过第一联轴器313带动其中一个第一同步轮314转动,进而带动其余的第一同步轮314转动,即带动第一同步带311转动。
第一移动机构31还可以包括:第一滑轨315。其中,第一滑轨315设置于支撑架1,并且,第一滑轨315与第一同步带311并列设置,第二移动机构32可滑动地设置于第一滑轨315,则第一滑轨315对第二移动机构32的移动方向进行限制。
具体实施时,支撑架1呈槽型,支撑架1的中心向内凹陷,储盘仓2设置于支撑架1槽型内部。第一滑轨315为两条,分别设置于支撑架1的长度方向的两侧。
第一移动机构31还可以包括:两个第一检测装置316。两个第一检测装置316沿壳体长度方向间隔地设置于支撑架1,具体地,两个第一检测装置316之间具有一定距离,该距离可以根据实际情况来确定,本实施例对此不做任何限制。每个第一检测装置316均用于检测第二移动机构32。优选的,每个第一检测装置316均为红外检测开关。
控制装置与两个第一检测装置316均电性连接,控制装置用于在任意一个第一检测装置316检测到第二移动机构32时,控制第一驱动机构停止驱动。
具体实施时,两个第一检测装置316分别设置在支撑架1在长度方向上的两个端部,在第二移动机构32沿支撑架1的长度方向移动至任意一个端部被对应端部的第一检测装置316检测到时,第一驱动机构停止驱动,则第一同步带311和第二移动机构32均停止移动。
可以看出,本实施例中,第一移动机构31的结构简单,便于实施,并能够通过第一同步带311和第二移动机构32带动夹取机构4移动,还能通过控制装置实现移动距离的精确控制。
参见图2和图3,上述实施例中,第二移动机构32可以包括:支架321、第二同步带322和第二驱动机构。其中,支架321与第一同步带311相连接,则第一同步带311的转动带动了支架321沿支撑架1的长度方向移动,并且,支架321对应于第一滑轨315处设置有滑块,滑块与第一滑轨315可滑动地连接。
具体实施时,支架321的长度方向(图2所示的由左至右的方向)与支撑架1的宽度方向相一致,支架321横设于支撑架1的宽度方向上。
第二同步带322可转动地设置于支架321,第二同步带322是沿壳体的宽度方向设置,即沿支撑架1的宽度方向转动,也即沿支架321的长度方向转动。第三移动机构33与第二同步带322相连接,则第二同步带322的转动带动了第三移动机构33的移动。
第二驱动机构设置于支架321,并且,第二驱动机构与第二同步带322和控制装置均连接,第二驱动机构用于在控制装置的控制下驱动第二同步带322沿支撑架1的宽度方向转动,进而带动第三移动机构33沿支撑架1的宽度方向移动。
具体实施时,第二驱动机构可以包括:第二电机323、第二联轴器、多个第二同步轮324和多个第二同步轮座。第二电机323和各第二同步轮座均设置于支架321,各第二同步轮324与各第二同步轮座一一对应,每个第二同步轮324均可转动地设置于对应的第二同步轮座,第二电机323的驱动端与第二联轴器相连接,第二联轴器与其中一个第二同步轮324连接,第二同步带322绕设于各第二同步轮324,第二电机323通过第二联轴器带动其中一个第二同步轮324转动,进而带动其余的第二同步轮324转动,即带动第二同步带322转动。
第二移动机构32还可以包括:第二滑轨325。其中,第二滑轨325设置于支架321,并且,第二滑轨325与第二同步带322并列设置,第三移动机构33可滑动地设置于第二滑轨325,则第二滑轨325对第三移动机构33的移动方向进行限制。
具体实施时,第二滑轨325为两条且并列设置于支架321的长度方向的两侧。
第二移动机构32还可以包括:两个第二检测装置326。两个第二检测装置326沿壳体宽度方向间隔地设置于支架321,具体地,两个第二检测装置326之间具有一定距离,该距离可以根据实际情况来确定,本实施例对此不做任何限制。每个第二检测装置326均用于检测第三移动机构33。优选的,每个第二检测装置326均为红外检测开关。
控制装置与两个第二检测装置326均电性连接,控制装置用于在任意一个第二检测装置326检测到第三移动机构33时,控制第二驱动机构停止驱动。
具体实施时,两个第二检测装置326分别设置在支架321的长度方向的两个端部,在第三移动机构33沿支架321的长度方向移动至任意一个端部被对应端部的第二检测装置326检测到时,第二驱动机构停止驱动,则第二同步带322和第三移动机构33均停止移动。
可以看出,本实施例中,第二移动机构32的结构简单,便于实施,并能够通过第二同步带322、第三移动机构33带动夹取机构4移动,还能通过控制装置实现移动距离的精确控制。
参见图4和图5,上述实施例中,第三移动机构33可以包括:支座架331、第三同步带332和第三驱动机构。其中,支座架331与第二同步带322相连接,则第二同步带322的转动带动了支座架331沿支撑架1的宽度方向移动,并且,支座架331对应于第二滑轨325处设置有滑块,滑块与第二滑轨325可滑动地连接。
具体实施时,支座架331的长度方向与支撑架1的高度方向相一致。
第三同步带332可转动地设置于支座架331,第三同步带332是沿壳体的高度方向设置,即沿支撑架1的高度方向转动,也即沿支座架331的长度方向转动。夹取机构4与第三同步带332相连接,则第三同步带332的转动带动了夹取机构4的移动。
第三驱动机构设置于支座架331,并且,第三驱动机构与第三同步带332和控制装置均连接,第三驱动机构用于在控制装置的控制下驱动第三同步带332沿支撑架1的高度方向转动,进而带动夹取机构4沿支撑架1的高度方向移动。
具体实施时,第三驱动机构可以包括:第三电机335、第三联轴器、多个第三同步轮336和多个第三同步轮座。第三电机335和各第三同步轮座均设置于支座架331,各第三同步轮336与各第三同步轮座一一对应,每个第三同步轮336均可转动地设置于对应的第三同步轮座,第三电机335的驱动端与第三联轴器相连接,第三联轴器与其中一个第三同步轮336连接,第三同步带332绕设于各第三同步轮336,第三电机335通过第三联轴器带动其中一个第三同步轮336转动,进而带动其余的第三同步轮336转动,即带动了第三同步带332转动。
第三移动机构33还可以包括:第三滑轨333。其中,第三滑轨333设置于支座架331,并且,第三滑轨333与第三同步带332并列设置,夹取机构4可滑动地设置于第三滑轨333,则第三滑轨333对夹取机构4的移动方向进行限制。
具体实施时,第三滑轨333为两条且并列设置于支座架331长度方向的两侧。
第三移动机构33还可以包括:两个第三检测装置334。两个第三检测装置334沿壳体高度方向间隔地设置于支座架331,具体地,两个第三检测装置334之间具有一定距离,该距离可以根据实际情况来确定,本实施例对此不做任何限制。每个第三检测装置334均用于检测夹取机构4。优选的,每个第三检测装置334均为红外检测开关。
控制装置与两个第三检测装置334均电性连接,控制装置用于在任意一个第三检测装置334检测到夹取机构4时,控制第三驱动机构停止驱动。
具体实施时,两个第三检测装置334均设置在支座架331的长度方向上且间隔设置,在夹取机构4沿支座架331的长度方向移动至被其中一个第三检测装置334检测到时,第三驱动机构停止驱动,则第三同步带332和夹取机构4均停止移动。
可以看出,本实施例中,第三移动机构33的结构简单,便于实施,并能够通过第三同步带332带动夹取机构4移动,还能通过控制装置实现移动距离的精确控制。
参见图4,上述实施例中,夹取机构4可以包括:支座41、丝杠42、第四驱动机构和两个夹爪43。其中,支座41与第三同步带332相连接,则第三同步带332的转动带动了支座41沿支撑架1的高度方向移动,并且,支座41对应于第三滑轨333处设置有滑块,滑块与第三滑轨333可滑动地连接。
丝杠42设置有两个螺纹方向相反的螺纹段,两个夹爪43与两个螺纹段一一对应,每个夹爪43的第一端(图4所示的上端)均与对应的螺纹段相螺接,每个夹爪43的第二端均为自由端,两个夹爪43的第二端(图4所示的下端)用于夹取税务UKey。
第四驱动机构与丝杠42和控制装置均相连接,第四驱动机构用于在控制装置的控制下驱动丝杠42转动,使得两个夹爪43相靠近以夹紧税务UKey5,或者使得两个夹爪43相远离以松开税务UKey5。
具体实施时,第四驱动机构可以包括:第四电机46和第四联轴器47。第四电机46设置于支座41,第四电机46的驱动端通过第四联轴器47与丝杠42相连接,第四电机46通过第四联轴器47带动丝杠42转动。
夹取机构4还可以包括:第四滑轨44。其中,第四滑轨44设置于支座41,并且,第四滑轨44与丝杠42并列设置,两个夹爪43的第一端均设置有延伸部,两个延伸部均可滑动地设置于第四滑轨44,以限制两个夹爪43的移动方向。
夹取机构4还可以包括:第四检测装置45。第四检测装置45设置于支座41的预设位置。控制装置与第四检测装置45电性连接,控制装置用于在第四检测装置45检测到夹爪43时控制第四驱动机构停止驱动。具体地,第四检测装置45可以设置在丝杠42的两个螺纹段之间的某个位置处,第四检测装置45可以检测其中一个夹爪43或者同时检测两个夹爪43,这样当控制装置检测到夹爪43时表示两个夹爪43将税务UKey夹紧,则控制第四驱动机构停止驱动,则两个夹爪43停止相对靠近。优选的,每个第四检测装置45均为红外检测开关。
具体实施时,第四检测装置45的设置位置可以根据实际情况来确定,本实施例对此不做任何限制。
可以看出,本实施例中,夹取机构4的结构简单,便于实施,能够通过控制装置实现夹爪43的精确控制。
综上所述,本实施例实现了自动领取税务UKey,无需税务人员分发,减小了税务人员的工作压力,并节省了领取税务UKey的时间,该装置能够为各种形状大小的税务UKey发售提供可靠、稳定地运行,保证顺利完成税务UKey的领取和发售。
方法实施例:
本实施例还提出了一种税务UKey自助发行领取装置的控制方法,参见图12,,税务UKey自助发行领取装置的控制方法包括如下步骤:
步骤S1,接收税务UKey的领取信息。
具体地,税务UKey自助发行领取装置可以包括:控制装置。输入装置输入领取信息,输入装置可与控制装置电性连接,控制装置接收输入装置输入的领取信息。具体实施时,工作人员可以操控输入装置输入领取信息。
步骤S2,根据领取信息控制位置调节装置移动至税务UKey的存放处。
具体地,参见图1,税务UKey自助发行领取装置还可以包括:壳体、支撑架1、储盘仓2、位置调节装置3和夹取机构4。支撑架1设置于壳体的内部,储盘仓2设置于支撑架1,储盘仓2用于存放税务UKey。位置调节装置3设置于支撑架1,控制装置与位置调节装置3相连接,控制装置根据领取信息控制位置调节装置3移动至税务UKey的存放处。
步骤S3,控制夹取机构夹取税务UKey。
具体地,夹取机构4设置于位置调节装置3,控制装置与夹取机构4相连接,控制装置控制夹取机构4夹取税务UKey。
步骤S4,控制位置调节装置移动至出盘口处。
具体地,壳体开设有出盘口,支撑架1对应于出盘口处设置有承载台。在夹取税务UKey后,控制装置控制位置调节装置3移动至出盘口处。
步骤S5,控制夹取机构松开税务UKey以使税务UKey掉落至出盘口处。
具体地,控制装置控制夹取机构松开税务UKey,以使税务UKey掉落至承载台上。由于承载台与出盘口相对应,所以领取人可以从出盘口处取出税务UKey。
其中,税务UKey自助发行领取装置的具体实施过程参见上述说明即可,本实施例在此不再赘述。
由于税务UKey自助发行领取装置具有上述效果,所以税务UKey自助发行领取装置的控制方法也具有相应的技术效果。
需要说明的是,本发明中的税务UKey自助发行领取装置及控制方法的原理相同,相关之处可以相互参照。
显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
- 税务UKey自助发行领取装置及控制方法
- 一种税务UKey自助领取装置