一种高柔性机器人自动压套枪
文献发布时间:2023-06-19 10:40:10
技术领域
本发明涉及自动压套技术领域,具体为一种高柔性机器人自动压套枪。
背景技术
在自动化压套领域,一般采用压套专机的型式来进行自动化压套生产,通常是一种产品对应开发一种压套专机,此专机包含工装定位夹具和压套模块,如需生产另一种类似产品需要重新开发一套专机,倘若一种产品多个衬套就需要对应多个压套伺服压套单元,同时在抽检压出力-位移数据是否合格时,需要人工通过螺栓拆装的形式把压入的上下工装换下来,费时费力。
例如,在汽车零部件压套生产中,需开发一套带定位和压套功能的专机来进行压套生产,如图1所示,专机上的定位系统将汽车零部件定位好(类似工装夹具的原理),然后压套,压套完成定位系统打开,最后将压套完成的产品取走。
由此可见,常规压套专机的方式来进行压套生产,一般设备比较庞大繁杂,且功能固定柔性不好,通常一种零件对应一个专机设备,要对多种产品要求切换生产需要整套设备切换(旧设备不用,换新设备来生产)使生产不够灵活无法实现一机多产的效果,另外专机成本也相对较高,与周边相关设备的对接以及维护与保养也比较麻烦。
发明内容
本发明的目的在于提供一种高柔性机器人自动压套枪,以解决上述背景技术中提出的问题。
为了解决上述技术问题,本发明提供如下技术方案:一种高柔性机器人自动压套枪,包括:压套专机夹具,压套工件,压套专机的核心压套单元,所述压套工件包括机器人快换支座,所述机器人快换支座的底部一侧设置有浮动直线导轨,所述浮动直线导轨的底部一侧设置有压套枪原点插销锁定装置,所述压套枪原点插销锁定装置的底部设置有压套枪气平衡装置,所述压套枪气平衡装置的侧壁设置有带力位移反馈的伺服电缸,所述带力位移反馈的伺服电缸的底部设置有C型支架,所述C型支架的一侧设置有压出工装自动切换机构与压入工装自动切换机构,所述压入工装自动切换机构置于所述压出工装自动切换机构的底部。
进一步的,所述压出工装自动切换机构包括第一气缸,所述第一气缸的一侧设置有第一连杆轴,所述第一连杆轴的一侧设置有第一铰链轴,所述第一铰链轴的一端设置有第一连杆,所述第一连杆的一端设置有第二铰链轴,所述第二铰链轴的下方设置有压出顶块。
进一步的,所述压入工装自动切换机构包括第二气缸,所述第二气缸的一侧设置有第二连杆轴,所述第二连杆轴的一端设置有第三铰链轴,所述第三铰链轴的一端设置有第二连杆,所述第二连杆的一端设置有第四铰链轴,所述第四铰链轴的顶部设置有压入顶块。使用的时候,第一步,机器人将处于打开且工装自动切换为压入状态的压套枪送到车桥要压套的部位,第二步,压套枪原点锁定装置打开,然后压套枪的气平衡装置气缸通调定好一定气压的平衡气体,接着压套枪在伺服电缸的作用下上下工装对夹压套,压套过程分为两个阶段:第一阶段,压套枪夹紧到一定程度上工装和下工装会在浮动直线导轨上相向同时贴合车桥压套部位套管两端平面;第二阶段,压套枪压紧到位,此时衬套完全压入到车身套管的所需位置,整个过程伺服电缸的力-位移传感器会实时输出数据以监控压套质量,并拟合成压入力-位移曲线呈现在触摸屏上;第三步,压套枪打开,打开分两个阶段,第一阶段,压套枪在伺服电缸的作用下完全打开,第二阶段,压套枪的气平衡装置气缸反向通气,使整个压套枪本体提留在初始位置的同时也拔出衬套的定位销,然后压套枪原点锁定装置到位;第四步,机器人将压套枪移开,此时车桥完成一个衬套的压入过程,其它部位的衬套按此过程循环进行。衬套压出过程只是机器人将处于打开且工装自动切换为压出状态的压套枪送到车桥要压套的部位其他动作一样,只是会输出压出力-位移曲线。
进一步的,所述C型支架的一侧开设有多个安装孔,所述压入工装自动切换机构与所述压出工装自动切换机构螺栓连接。
进一步的,所述机器人快换支座的侧壁开设有多个螺栓孔,所述机器人快换支座与所述带力位移反馈的伺服电缸连接。
进一步的,所述C型支架采用金属材质。
进一步的,所述C型支架的外表面涂覆有防腐蚀层。
进一步的,所述压套专机夹具采用三臂机器人。
进一步的,所述浮动直线导轨采用金属材质,所述浮动直线导轨的侧壁开设有固定孔。
与现有技术相比,本发明所达到的有益效果是:
(1)本发明通过机器人将处于打开且工装自动切换为压入状态的压套枪送到车桥要压套的部位,压套枪原点锁定装置打开,然后压套枪的气平衡装置气缸通调定好一定气压的平衡气体,接着压套枪在伺服电缸的作用下上下工装对夹压套,压套过程分为两个阶段:第一阶段,压套枪夹紧到一定程度上工装和下工装会在浮动直线导轨上相向同时贴合车桥压套部位套管两端平面;第二阶段,压套枪压紧到位,此时衬套完全压入到车身套管的所需位置,整个过程伺服电缸的力-位移传感器会实时输出数据以监控压套质量。
(2)本发明高柔性机器人自动压套枪进行压套的结构,并整体是由机器人来移动到位的,所以一把压套枪可以用在多种不同产品上,只要要衬套相同甚至不同都可以用一把压套枪来进行生产,可见本发明实施例的压套枪比常规压套专机功能更全面多变柔性更好,自动切换压入和压出工装的自锁机械机构,以便于通过机器人设定好想要的计数压入次数来自动切换衬套压出模式抽检,从而实现压套工位的全自动,高柔性机器人自动压套枪是由机器人来移动到位的,所以一把压套枪可以用在多种不同产品上,或者一种产品多个位置进行压套。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
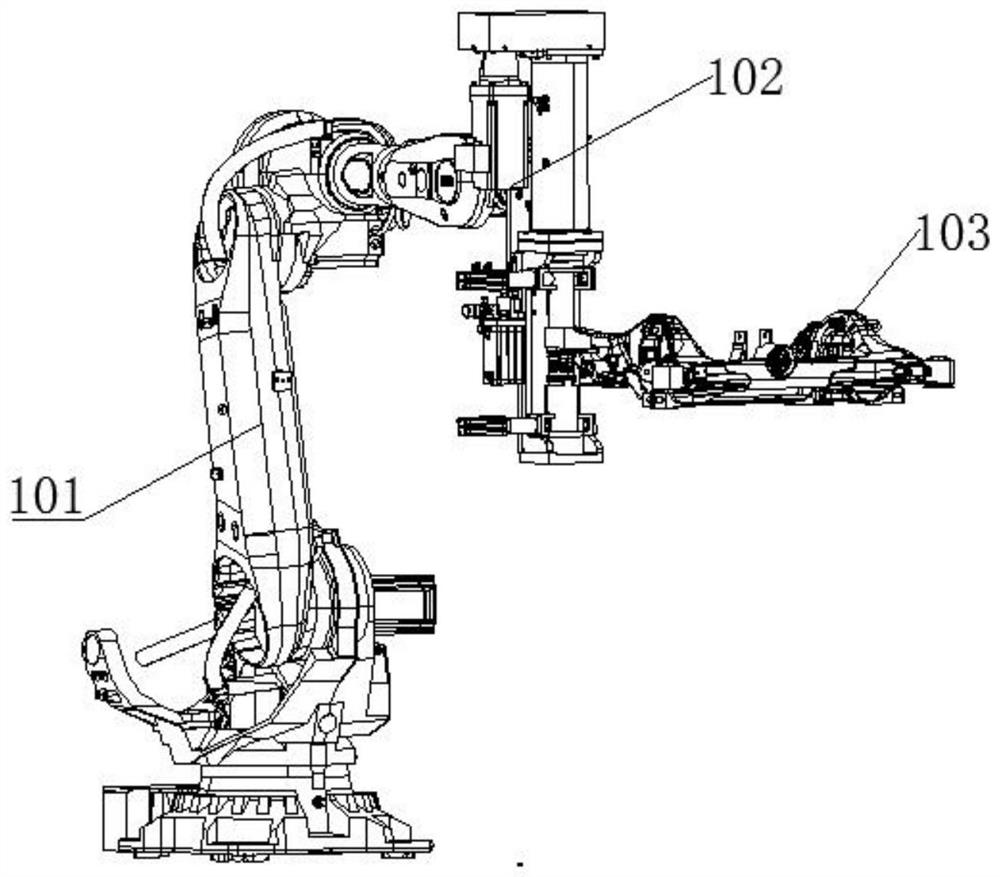
图1为本发明的整体的结构示意图;
图2为本发明的压套工件结构示意图;
图3为本发明的压出工装自动切换机构示意图;
图4为本发明的压入工装自动切换机构示意图。
图中:101、压套专机夹具;102、压套工件;103、压套专机的核心压套单元;301、第一气缸;302、第一连杆轴;303、第一铰链轴;304、第一连杆;305、第二铰链轴;306、压出顶块;401、第二气缸;402、第二连杆轴;403、第三铰链轴;404、第二连杆;405、第四铰链轴;406、压入顶块;505、带力位移反馈的伺服电缸;506、C型支架;507、压出工装自动切换机构;508、压入工装自动切换机构。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-4,本发明提供技术方案:一种高柔性机器人自动压套枪,包括:压套专机夹具101,压套工件102,压套专机的核心压套单元103,所述压套工件102包括机器人快换支座501,所述机器人快换支座501的底部一侧设置有浮动直线导轨502,所述浮动直线导轨502的底部一侧设置有压套枪原点插销锁定装置503,所述压套枪原点插销锁定装置503的底部设置有压套枪气平衡装置504,所述压套枪气平衡装置504的侧壁设置有带力位移反馈的伺服电缸505,所述带力位移反馈的伺服电缸505的底部设置有C型支架506,所述C型支架506的一侧设置有压出工装自动切换机构507与压入工装自动切换机构508,所述压入工装自动切换机构508置于所述压出工装自动切换机构507的底部;
所述压出工装自动切换机构507包括第一气缸301,所述第一气缸301的一侧设置有第一连杆轴302,所述第一连杆轴302的一侧设置有第一铰链轴303,所述第一铰链轴303的一端设置有第一连杆304,所述第一连杆304的一端设置有第二铰链轴305,所述第二铰链轴305的下方设置有压出顶块306;
所述压入工装自动切换机构508包括第二气缸401,所述第二气缸401的一侧设置有第二连杆轴402,所述第二连杆轴402的一端设置有第三铰链轴403,所述第三铰链轴403的一端设置有第二连杆404,所述第二连杆404的一端设置有第四铰链轴405,所述第四铰链轴405的顶部设置有压入顶块406。
所述C型支架506的一侧开设有多个安装孔,所述压入工装自动切换机构508与所述压出工装自动切换机构507螺栓连接;
所述机器人快换支座501的侧壁开设有多个螺栓孔,所述机器人快换支座501与所述带力位移反馈的伺服电缸505连接;
所述C型支架506采用金属材质,所述C型支架506的外表面涂覆有防腐蚀层;
所述压套专机夹具101采用三臂机器人;
所述浮动直线导轨502采用金属材质,所述浮动直线导轨502的侧壁开设有固定孔。
本发明的工作原理:在使用时,第一步,机器人将处于打开且工装自动切换为压入状态的压套枪送到车桥要压套的部位,第二步,压套枪原点锁定装置打开,然后压套枪的气平衡装置气缸通调定好一定气压的平衡气体,接着压套枪在伺服电缸的作用下上下工装对夹压套,压套过程分为两个阶段:第一阶段,压套枪夹紧到一定程度上工装和下工装会在浮动直线导轨上相向同时贴合车桥压套部位套管两端平面;第二阶段,压套枪压紧到位,此时衬套完全压入到车身套管的所需位置,整个过程伺服电缸的力-位移传感器会实时输出数据以监控压套质量,并拟合成压入力-位移曲线呈现在触摸屏上;第三步,压套枪打开,打开分两个阶段,第一阶段,压套枪在伺服电缸的作用下完全打开,第二阶段,压套枪的气平衡装置气缸反向通气,使整个压套枪本体提留在初始位置的同时也拔出衬套的定位销,然后压套枪原点锁定装置到位;第四步,机器人将压套枪移开,此时车桥完成一个衬套的压入过程,其它部位的衬套按此过程循环进行。衬套压出过程只是机器人将处于打开且工装自动切换为压出状态的压套枪送到车桥要压套的部位其他动作一样,只是会输出压出力-位移曲线。
由此可见,高柔性机器人自动压套枪进行压套的结构,并整体是由机器人来移动到位的,所以一把压套枪可以用在多种不同产品上,只要要衬套相同甚至不同都可以用一把压套枪来进行生产,可见本发明实施例的压套枪比常规压套专机功能更全面多变柔性更好,自动切换压入和压出工装的自锁机械机构,以便于通过机器人设定好想要的计数压入次数来自动切换衬套压出模式抽检,从而实现压套工位的全自动,高柔性机器人自动压套枪是由机器人来移动到位的,所以一把压套枪可以用在多种不同产品上,或者一种产品多个位置进行压套。只要衬套相同甚至有些不同差不多都可以用一把枪实现压套生产从而实现一机多用,不管生产几种产品都不用切换本压套设备(压套枪),更没有切换不便一说了,只要将要生产的产品简单定位放到压套站就行了,高柔性机器人自动压套枪可以用在一种产品多个衬套以及不同产品压衬套生产项目上,一次成本投入可以生产多种产品,所以压套成本由多种产品生产项目共同分担,从而相对常规专机压套大大减少了成本,高柔性机器人自动压套枪自身只有压套功能的结构,而且结构相对也比较简洁,而且也仅仅是跟机器人有关联,跟其它设备几乎不用考虑对接问题,相对与常规专机设备就简单多了,由于压套枪自身结构简洁功能鲜明没有过多的累赘功能模块,维护与保养起来也很方便,保留并改进优化压套功能模块,将压套功能做到更专业可靠,去除针对性太强没有互换性的工件定位结构。这样能在让自身结构简洁体积更小的同时还能将压套功能做到更专业可靠,而且对空间和周边设备的要求也降低,对各种工况的适应性也大大提高,高柔性机器人自动压套枪通过气平衡装置的方式来实现消除压套枪本身自重加载在压入或者压出力上带来相应力-位移数据失真问题,从而更加精准的实时采集对应数据为生产质量提供可靠的保证,高柔性机器人自动压套枪气通过浮动直线导轨装置来实现压套时上下工装自适应套管端面消除需要压套的套管端面面轮廓度对压套质量的影响,这个质量影响包括衬套没压到位以及由于压套时起支撑作用的面没贴实从而拉伤产品。本发明专利中的浮动导轨机构可以使在压套时工装与支撑面自适应贴实,从而有效可靠地保证产品质量。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 一种高柔性机器人自动压套枪
- 一种高柔性机器人自动压套枪