一种基于多特征信息融合的水平集红外图像分割方法
文献发布时间:2023-06-19 10:43:23
技术领域
本发明涉及红外目标分割技术领域,特别是一种基于多特征信息融合的水平集红外图像分割方法。
背景技术
图像分割是图像处理过程中的重要一环,在与图像相关的各具体应用领域,如航天工程、地质勘探、安全监控等都需依赖于图像分割技术,图像分割技术的优劣对后期图像处理的准确性有直接影响。近些年来,基于水平集的图像分割方法通过将目标轮廓表示为高维水平集函数的零水平集,求解水平集演化方程的过程即为曲线演化过程,水平集方程收敛时对应的零水平集即为目标分割结果。由于该方法能够获得平滑且闭合的分割轮廓且解决了曲线演化的拓扑问题,引起了大家的广泛关注。红外图像具有对比度低、灰度不均匀、边界模糊等特点,目前的水平集图像分割方法通常只利用了图像的单一特征信息驱动曲线演化,用于处理红外图像时,仍不能得到理想的分割效果,误分割、漏分割的情况时有发生。因此,如何正确分割灰度不均匀的红外图像仍是红外图像处理领域的研究热点。
传统的水平集分割方法主要分为两种:一种是基于边缘信息的分割方法,一种是基于区域信息的分割方法。基于边缘信息的方法利用图像梯度信息建立边缘停止函数,使演化曲线在靠近目标边界时停止演化,获得分割结果,如Caselles等人提出的GAC模型(Caselles V,Kimmel R,Sapiro G.Geodesic active contours[C]//Proceedings ofIEEE international conference on computer vision.IEEE,1995:694-699.),但该方法不能有效分割边界模糊的红外图像且对轮廓的初始化位置敏感。基于区域信息的方法利用轮廓内外的灰度均值信息建立能量函数,通过最小化能量函数驱动曲线靠近目标边缘,如Chan 和Vese等人提出的CV模型(Chan T F,Vese L A.Active contours without edges[J].IEEE Transactions on image processing,2001,10(2):266-277.),但该方法将目标和背景的灰度估计为一个常数,不能有效处理灰度不均匀的图像。Zhang等人结合CV模型和GAC 模型的优势构建了SLGS模型(Zhang K,Zhang L,Song H,et al.Active contourswith selective local or global segmentation:a new formulation and level setmethod[J].Image and Vision computing,2010,28(4):668-676.),能有效分割边界模糊的图像且对轮廓初始位置不敏感,但该模型仍基于灰度均匀的假设,对灰度不均匀的图像不能取得理想的效果。
发明内容
本发明的目的在于提供一种准确率和分割效率高的红外图像分割方法。
实现本发明目的的技术解决方案为:一种基于多特征信息加权融合的水平集图像分割方法,包括以下步骤:
步骤1、输入待分割红外图像,将初始轮廓初始化为二值函数;
步骤2、由输入图像求解得到灰度特征图像、局部熵值特征图像和标准差特征图像;
步骤3、求解轮廓内外的全局特征信息和局部特征信息,构建灰度拟合图像、熵值拟合图像和标准差拟合图像;
步骤4、比较步骤2的特征图像和步骤3的特征拟合图像的相似性差异,分别得到由灰度信息驱动的符号压力函数、由熵值信息驱动的符号压力函数和由标准差信息驱动的符号压力函数,将上述三个函数相加并归一化,获得最终的符号压力函数;
步骤5、将最终的符号压力函数代入水平集演化方程演化,并用高斯滤波器正则化每次的演化结果,直至方程收敛,输出分割结果。
本发明与现有技术相比,其显著优点为:(1)通过计算全局特征拟合值和局部特征拟合值来构建特征拟合图像,全局信息避免曲线演化时陷入局部最小值,局部信息在灰度不均匀区域为曲线提供更多的细节信息,从而提高了红外图像分割的准确性和鲁棒性;(2)符号压力函数由灰度信息、熵值信息和标准差信息三部分构成,包含的特征信息更丰富,可提供更加准确的曲线演化驱动力,从而提高了对图像分割的准确性;(3)将轮廓初始化为二值函数,并在每次迭代结束后用高斯核函数正则化曲线演化结果,避免了演化过程中的重新初始化计算,提高了算法的运算效率。
附图说明
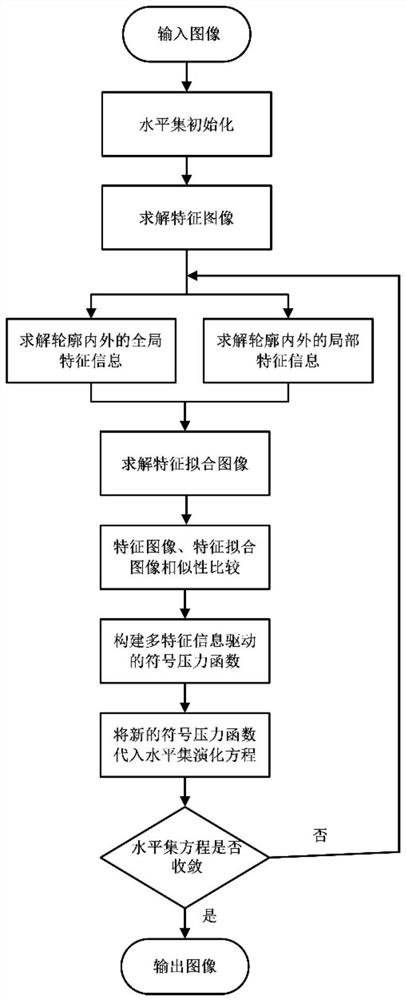
图1是本发明一种基于多特征信息驱动的水平集红外图像分割方法的流程示意图。
图2是本发明实施例中采用本发明方法与现有水平集方法对红外测试图像的分割结果对比图。
图3是本发明实施例中采用本发明方法与现有水平集方法对红外测试图像的二值分割结果对比图。
具体实施方式
下面结合附图和具体实施例对本发明作进一步的详细说明。
结合图1,本发明一种基于多特征信息加权融合的水平集图像分割方法,包括以下步骤:
步骤1、输入待分割红外图像,将轮廓曲线初始化为二值函数,具体如下:。
将水平集方程φ初始化为二值函数,轮廓内外的符号相反,其表达式如下:
其中,Ω表示输入的二维图像,Ω
步骤2、由输入图像求解得到灰度特征图像I、局部熵值特征图像I_en和局部标准差特征图像I_std,具体如下:
步骤2.1、由输入红外图像I的灰度值获得灰度图像I(x,y);
步骤2.2、对于灰度图像I(x,y)中任一像素点(x,y),以像素点(x,y)为中心点设置9×9大小的局部窗口W
式中,L为局部窗口内总的灰度等级数,n
步骤2.3、灰度图像I(x,y)的局部标准差图像为:
式中,μ为局部窗口内所有像素点的灰度均值,其计算公式为
步骤3、求解轮廓内外的全局特征信息和局部特征信息,构建灰度拟合图像I
步骤3.1、求解轮廓内外的全局灰度拟合值和局部灰度拟合值,构建灰度拟合图像:
对于原始灰度特征图像I,轮廓曲线将其分为两个区域,轮廓内外灰度均值常数均值c
其中,c
根据LBF模型,对于图像中任一像素点(x,y),可利用高斯核函数嵌入图像的局部灰度信息,邻域轮廓内外的灰度均值f
其中,f
利用权重系数ω,将全局灰度均值信息和局部灰度信息结合起来,计算轮廓内外的灰度拟合值C1和C2,计算公式为:
C1=ω·c
C2=ω·c
其中,C1为轮廓内灰度拟合值,C2为轮廓外灰度拟合值,ω为调节全局项和局部项权重的常数,设置为0.5。
根据Heaviside函数性质,当φ>0时,H(φ)=1,当φ<0时,H(φ)=0,定义灰度拟合图像为:
I
步骤3.2、求解轮廓内外的全局熵值拟合值和局部熵值拟合值,构建熵值特征拟合图像:
对于熵值特征图像I_en,轮廓曲线将其分为两个区域,轮廓内外熵值均值常数的计算公式为:
其中,en
对于图像中任一像素点(x,y),利用高斯核函数嵌入图像的局部熵值信息,其邻域轮廓内的熵值信息的计算公式为:
其中,std
通过权重系数ω,将全局熵值信息和局部熵值信息结合起来,计算轮廓内外的熵值拟合值E1和E2,计算公式为:
E1=ω·en
E2=ω·en
其中,E1为轮廓内熵值拟合值,E2为轮廓外熵值拟合值,定义熵值拟合图像为:
I_en
步骤3.3、求解轮廓内外的全局标准差拟合值和局部标准差拟合值,构建局部标准差特征拟合图像:
对于局部标准差特征图像I_std,轮廓曲线将其分为两个区域,轮廓内外标准差均值常数的计算公式为:
其中,s
对于图像中任一像素点(x,y),利用高斯核函数嵌入图像的局部标准差信息,其邻域轮廓内的标准差信息的计算公式为:
其中,std
通过权重系数ω,将全局标准差信息和局部标准差信息结合起来,计算轮廓内外的标准差拟合值S1和S2,计算公式为:
S1=ω·s
S2=ω·s
其中,S1为轮廓内标准差拟合值,S2为轮廓外标准差拟合值,定义熵值拟合图像为:
I_std
步骤4、比较步骤2的特征图像和步骤3的特征拟合图像的相似性差异,分别得到由灰度信息驱动的符号压力函数spf
步骤4.1、比较特征图像和特征拟合图像的相似性差异,确定演化曲线上每个像素点的演化方向,计算公式为:
spf
spf
spf
其中spf
步骤4.2、将上述三个函数进行加权结合,得到最终的符号压力函数,计算公式如下:
spf
其中,spf
由上式可以看出,新构建的符号压力函数spf
步骤5、将最终的符号压力函数spf
步骤5.1、将水平集演化方程由最终的符号压力函数改写为:
其中,φ
步骤5.2、为避免在迭代过程中进行重新初始化计算,利用高斯滤波函数对每次演化结果进行正则化,即:
φ
G
步骤5.3、为了使演化过程及时停止,设置收敛阈值δ=10
实施例1
本实施例将本发明与GAC、CV、LPF、LIC四种传统水平集分割方法进行比较。将水平集函数统一设置为二值函数,并在图像中心设置80×80的初始轮廓。在Window10 操作系统下的Matlab 2016a平台上,其运行结果如图2所示。
图2中第1列为输入测试图像原图,图2中第2~6列依次为GAC、CV、LPF、LIC 和本发明提供方法的程序运行结果,图2中第7列为图像分割真值。GAC模型通过图 像梯度信息建立边缘停止函数,使曲线在靠近物体边缘时停止演化,但该方法需将轮廓 初始化在适当的位置,否则不能准确获得分割结果。在本次仿真实验中,轮廓被初始化 在图像中间,没有完整的包含目标边界,故分割效果均不理想。CV模型利用轮廓内外 的灰度均值信息来最小化能量函数,但当图像包含灰度不均匀区域时,往往容易造成过 度分割,如测试图像中的人体腹部、腿部等区域,均有过度分割的情况出现。LPF模型 是经典的利用图像局部灰度信息建立能量函数的分割模型,但由于该模型缺乏全局信息, 所以易陷入局部最小值。从图中LPF模型的分割结果可以看出,曲线在目标内部停止 演化,导致目标被误分割为多个区域,不能得到完整的目标轮廓。LIC模型通过设计聚 类准则函数来估计每个像素邻域的图像灰度,并用估计的偏移场进行灰度校正,但该方 法只适用于背景简单的图像,当背景复杂时,背景轮廓曲线不易收敛,因此从图2第5 列中可以看到许多演化曲线在背景区域不收敛,导致错误分割。此外,LIC模型没有考 虑聚类差异,故对于灰度不均匀区域仍会有误分割情况出现。本发明方法利用灰度、熵 值和标准差三种特征信息驱动曲线演化,考虑全局信息的同时包含了更多局部特征信息, 因此,相比于其他方法,能更有效分割不均匀红外图像。
图3为分割二值分割结果图,图3第1~5列依次为GAC、CV、LPF、LIC和本文方法运行结果,图3第6列为图像真值。为进一步对比不同方法的分割结果,引入F 值作为分割结果的量化评价指标,其计算公式如下:
其中P为准确率,R表示召回率,β通常设置为常数1.0,F值越大,说明分割结果越准确。从表1可以看出,由于GAC模型只有在轮廓初始化在目标边界时,该方法才能准确分割物体,在本实验中不满足其初始条件,故GAC模型的F值在各测试图像都最小。相比于GAC模型,CV模型的F值较为理想,但当物体包含灰度不均匀区域时,易发生边界泄露和过度分割,此时的F值不能满足分割要求。由于LPF模型只利用局部灰度信息构造能量函数,故演化曲线易陷入局部最小从而导致物体被误分割为多个子区域,其F值也偏小。由于LIC模型不能处理背景较为复杂的图像,故其F值在有些测试图像的较大,在有些测试图像上不理想。而我们的方法在各测试图像上都取得了较为理想的F值,且对所有测试图像的平均F值最大。总体来看,本发明方法对于不均匀红外图像分割准确率最高。
表1:F值对比表
表2为各方法的运行时间对比表,GAC模型由于其能量函数的不易收敛性,其运行时间近似于本发明的7倍。CV模型利用全局灰度均值信息来构建能量函数,其运行速度相比于GAC模型有明显提高,但仍低于本发明方法的运行速度。LPF模型和LIC 模型都是通过估计局部灰度值来建立局部能量函数,再通过对局部能量函数进行积分构建总能量泛函,最小化局部能量泛函需较多的运算时间,故其效率仍不够理想。相比于其他方法,本发明方法在各测试图像上的运行时间都位于前列,且总体运行时间最短,效率最高。
表2:运行时间对比表(单位:秒)
综合以上分析,本发明利用多特征信息联合驱动水平集方程演化能够有效分割红外不均匀图像,且分割准确率、分割效率上均高于传统的水平集方法。
- 一种基于多特征信息融合的水平集红外图像分割方法
- 一种基于PCA重构误差水平集的图像分割方法