一种焊接机器人运行与维护的数字孪生系统
文献发布时间:2023-06-19 10:44:55
技术领域
本发明涉及一种焊接机器人运行与维护的数字孪生系统。
背景技术
现有的焊接机器人系统的维护策略往往是进行定期维护,即是根据焊接机器人或非标设备的运行时间进行保养和重新标定等。这个策略的弊端在于,处于恶劣工作加工环境下的设备可能会在定期保养时间前就已经出现各种磨损等异常。而且,现有市面上的绝大多数本地运维软件或者网页版软件只是对设备数据进行简单的处理,根据误差大小来设置报警是最常用的方式。而且两次保养之间,焊接机器人的加工精度是非线性或者非其他已知函数的方式下降,下降情况根本无法预判。应用在精细化加工的时候,其精度不可估不可控的情况是无法接受的。
发明内容
本发明目的在于提供一种焊接机器人运行与维护的数字孪生系统,以解决上述现有技术存在的问题。
本发明所述焊接机器人运行与维护的数字孪生系统,包括云端服务器、工控机、PLC和焊接机器人;所述的云端服务器与工控机网络通讯连接,工控机与PLC总线通讯连接,PLC与焊接机器人有线或无线通讯连接;
所述的PLC获取焊接机器人的所有运行参数作为输入量矩阵X
所述的工控机用于通过PLC控制焊接机器人工作以及将所述健康状态Y
所述的云端服务器收到所述健康状态Y
S1、对决策值Y
S2、单个输入变量x
根据相关性系数ρ
利用式子PPVar
根据修正值PPVar
利用赋值后的输入变量x
S3、对步骤S2中有标签的变量PVar
对变量PVar
利用式子
S4、分别计算第二诊断结果Y’
本发明所述焊接机器人运行与维护的数字孪生系统,其优点在于,实时调整决策值输出结果,无需考虑两次保养之间的磨损变化是否线性或者是否可控。提高了焊接机器人的诊断准确率,有效地保证了焊接机器人运行状况的安全,从而避免了焊接机器人意外停机造成的经济损失。
附图说明
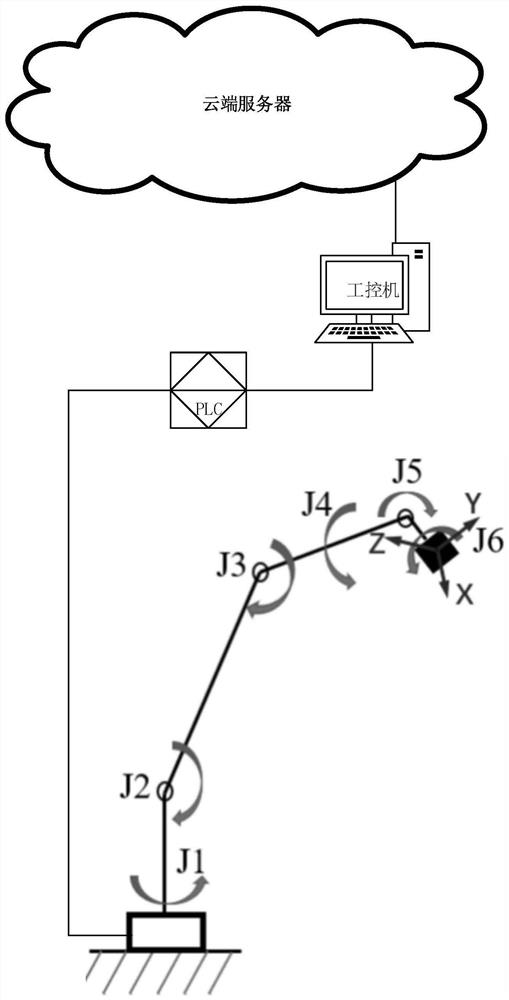
图1是本发明所述焊接机器人运行与维护的数字孪生系统的结构示意图。
附图标记:J1至J6是焊接机器人的第一至第六轴。
具体实施方式
如图1所示,本发明所述焊接机器人运行与维护的数字孪生系统包括云端服务器、工控机、PLC和焊接机器人。所述的云端服务器与工控机网络通讯连接,工控机与PLC总线通讯连接,PLC与焊接机器人有线或无线通讯连接。
云端服务平台实时调用本地运维软件采集的数据,并把数据仓储在云端服务器。本地运维软件安装在工控机上,根据现场设备的情况,设定数据分析时间间隔T,以及给定的同类型变量用于分析的数量总量N。
所有影响变量的组合为输入量矩阵X
焊接机器人的第五轴为重力轴,第五轴的惯量比最大,为焊接机器人最薄弱的环节,是影响焊接机器人末端振动的最大因素,相对来说第四轴和第六轴影响较小。此外,第二轴和第三轴也有影响,但第二轴的影响因素更为明显。因此,赋予各个轴不一样的权重K={K
此外,影响焊接机器人加工性能的因素有很多,例如电流I,负载重量M,运行速度V,外部的焊头长度H等,不同类型变量之间的权重系数K’={K’
焊接机器人部件的健康状况会反映在不同的时间尺度上,分别有日、月、年,相应时间的权重系数为K”={K”
为进一步筛选出有用的变量用于分析,对同类型的变量进行相关性分析,第i个输入变量采集的数值按照大小顺序排列为{Var
对得到的各个相关性系数ρ
针对同类型的变量,运行过程中出现的最大值为Var
经过相关性筛选后的某个具体变量为PVar
PPVar
对得到的修正数值进行归一化处理,用于加快数据计算时间。MAXPPVar
x
焊接机器人系数的初始矩阵R由厂家提供,因此,可以基于公式(1)计算出第二诊断结果Y’
同时,对进行相关性分析后的有标签的数据和结果进行有监督的神经网络学习,用于验证和修正上述步骤得到的初步诊断结果。从而对上述的相关性系数进行有效的调整。经过对相关性筛选后的变量PVar
使用公式(5)得到的数值结合相对应的焊接机器人真实状态的标签,一起代入经典的卷积神经网络处理模块得到测试的新样本的预测结果值,同时也可以得到理想的拟合结果Y”
令初始值Y
可得到准确的焊接机器人状况诊断结果,大大方便控制后台的管理者进行设备的维护决策。
初步的实验结果显示,现有传统的误差分析方法得到的实验结果精度为78%,本发明方法的准确率达97%,大大提高了设备的诊断准确率,有效地保证了设备运行状况的安全,从而避免了设备意外停机造成的经济损失。
对于本领域的技术人员来说,可根据以上描述的技术方案以及构思,做出其它各种相应的改变以及形变,而所有的这些改变以及形变都应该属于本发明权利要求的保护范围之内。
- 一种焊接机器人运行与维护的数字孪生系统
- 一种结合智能视觉的工业机器人数字孪生系统及其运行方法