一种控制无人驾驶车辆的方法和装置
文献发布时间:2023-06-19 10:46:31
技术领域
本发明实施例涉及无人驾驶技术领域,特别是涉及一种控制无人驾驶车辆的方法和装置。
背景技术
无人驾驶汽车是智能汽车的一种,也称为轮式移动机器人,主要依靠车内的以计算机系统为主的智能驾驶仪来实现无人驾驶的目的,无人驾驶汽车是通过车载传感系统感知道路环境,自动规划行车路线并控制车辆到达预定目标的智能汽车,其中车载传感系统包括激光雷达。
但是,本发明的发明人在实现本发明的过程中,发现:目前,无人驾驶车辆的激光雷达常置于无人驾驶车辆的车顶上,并且直接暴露,而在激光雷达长期暴露时,空气中的灰尘或者其它异物容易积聚于激光雷达的外表面,使得激光雷达无法正常工作。
发明内容
鉴于上述问题,本发明实施例提供了一种控制无人驾驶车辆的方法和装置,克服了上述问题或者至少部分地解决了上述问题。
根据本发明实施例的一个方面,提供了一种控制无人驾驶车辆的方法,所述无人驾驶车辆包括车体、激光雷达、升降装置和清洁装置,所述车体的车顶设置有收容槽,所述激光雷达包括透明外壳和雷达本体,所述透明外壳收容于所述收容槽,并且所述透明外壳可相对于所述收容槽运动,以使所述激光雷达收缩于所述收容槽内或者从所述收容槽伸出,所述升降装置设置于所述收容槽内,所述升降装置与所述透明外壳连接,所述升降装置用于驱动所述透明外壳相对于所述收容槽运动,所述清洁装置设置于所述收容槽内,所述清洁装置用于对所述激光雷达进行清洁,其特征在于,所述方法包括:
获取所述雷达本体所探测得到的第一探测数据;根据所述第一探测数据,确定所述透明外壳是否满条预设清洗条件;若满足所述预设清洗条件,获取所述无人驾驶车辆的当前行驶数据;根据所述当前行驶数据,确定所述无人驾驶车辆当前是否满足预设清洗环境;若满足所述预设清洗环境,控制所述清洁装置对所述透明外壳进行清洁。
在一种可选的方式中,所述根据所述第一探测数据,确定所述透明外壳是否满条预设清洗条件的步骤,进一步包括:
根据所述第一探测数据,确定所述无人驾驶车辆周边的障碍物,并且获取各所述障碍物与所述雷达本体之间的距离;
判断是否存在距离小于预设阈值的障碍物;
若存在,则确定所述透明外壳满足预设清洗条件;
若不存在,则确定所述透明外壳不满足预设清洗条件。
在一种可选的方式中,所述根据所述当前行驶数据,确定所述无人驾驶车辆当前是否满足预设清洗环境的步骤,进一步包括:
根据所述当前行驶数据,判断所述无人驾驶车辆是否处于泊车状态;
若处于所述泊车状态,则确定所述无人驾驶车辆当前满足预设清洗环境;
若不处于所述泊车状态,则确定所述无人驾驶车辆当前不满足预设清洗环境。
在一种可选的方式中,所述方法还包括:
若不满足所述预设清洗环境,向地图服务器发送地图请求指令;
接收所述地图服务器根据地图请求指令返回的电子地图;
在所述电子地图中定位距离所述无人驾驶车辆最近的泊车点;
控制所述无人驾驶车辆行驶至所述泊车点;
在所述无人驾驶车辆停泊至所述泊车点后,返回所述根据所述当前行驶数据,确定所述无人驾驶车辆当前是否满足预设清洗环境的步骤。
在一种可选的方式中,所述方法还包括:在控制所述无人驾驶车辆行驶至所述泊车点的过程中,控制所述无人驾驶车辆的报警灯亮起。
在一种可选的方式中,所述方法还包括:在控制所述无人驾驶车辆行驶至所述泊车点的过程中,向周边的车辆广播数据请求;接收周边的车辆根据所述数据请求,返回的用于探测障碍物的第二探测数据;根据所述第二探测数据,对所述雷达本体所探测得到的第一探测数据进行修正;根据修正后的第一探测数据,控制所述无人驾驶车辆行驶。
根据本发明实施例的另一个方面,提供了一种控制无人驾驶车辆的装置,包括第一获取模块,用于获取所述雷达本体所探测得到的第一探测数据;
第一分析模块,用于根据所述第一探测数据,所述第一分析模块确定所述透明外壳是否满条预设清洗条件;
第二获取模块,用于若满足所述预设清洗条件,所述第二获取模块获取所述无人驾驶车辆的当前行驶数据;
第二分析模块,用于根据所述当前行驶数据,所述第二分析模块确定所述无人驾驶车辆当前是否满足预设清洗环境;
控制模块,用于若满足所述预设清洗环境,所述控制模块控制所述清洁装置对所述透明外壳进行清洁。
根据本发明实施例的另一个方面,提供了一种无人驾驶车辆,包括:车体,所述车体的车顶设置有收容槽;
激光雷达,包括透明壳体和雷达本体,所述雷达本体收容于所述透明壳体内,所述透明壳体收容于所述收容槽,并且所述透明壳体可相对于所述收容槽运动,以使所述激光雷达收缩于所述收容槽内或者从所述收容槽伸出;
升降装置,设置于所述收容槽内,所述升降装置与所述透明壳体连接,所述升降装置用于驱动所述透明壳体相对于所述收容槽运动;
清洁装置,设置于所述收容槽内,所述清洁装置用于对所述透明壳体进行清洁;以及,
控制器,包括至少一个处理器以及存储器,所述至少一个处理器分别与存储器、雷达本体、升降装置和清洁装置通信连接,其中,所述存储器存储有可被所述至少一个处理器执行的指令程序,所述指令程序被所述至少一个处理器执行,以使所述至少一个处理器能够执行如上所述的控制无人驾驶车辆的方法。
在一种可选的方式中,所述清洁装置包括升降机构、转动机构、锥齿、驱动轴承和胶圈;所述升降机构设置于所述收容槽内,所述升降机构分别与转动机构和驱动轴承的外圈固定,所述升降机构用于驱动所述转动机构和驱动轴承上升或者下降,所述转动机构的输出轴与所述锥齿固定,所述驱动轴承的内圈设置有环状的从动齿,所述从动齿与所述锥齿齿合,所述胶圈固定于所述内圈的内表面,并且所述胶圈套设于所述透明壳体上,当所述转动机构驱动所述锥齿转动时,所述锥齿带动所述驱动轴承的内圈转动,所述驱动轴承的内圈带动所述胶圈转动,以使所述胶圈对所述透明壳体进行清洁。
在一种可选的方式中,所述驱动轴承的内圈的内表面设置有环形凹槽,所述胶圈固定于所述环形凹槽,并且所述胶圈部分从所述环形凹槽伸出。
本发明实施例的有益效果是:区别于现有技术的情况,本发明实施例首先获取雷达本体所探测得到的第一探测数据,之后根据所述第一探测数据,确定所述透明外壳是否满条预设清洗条件,若满足所述预设清洗条件,获取所述无人驾驶车辆的当前行驶数据,然后根据所述当前行驶数据,确定所述无人驾驶车辆当前是否满足预设清洗环境,最后,若满足所述预设清洗环境,控制所述清洁装置对所述透明外壳进行清洁,实现对透明外壳进行自动清洁,有利于避免透明外壳上积聚的灰尘或者异物,影响到激光雷达探测无人驾驶车辆四周的障碍物,从而影响无人驾驶车辆行车安全。
附图说明
为了更清楚地说明本发明具体实施例或现有技术中的技术方案,下面将对具体实施例或现有技术描述中所需要使用的附图作简单地介绍。在所有附图中,类似的元件或部分一般由类似的附图标记标识。附图中,各元件或部分并不一定按照实际的比例绘制。
图1是本发明另一实施例无人驾驶车辆的一工作状态示意图;
图2是本发明另一实施例无人驾驶车辆的控制器连接模块图;
图3是本发明另一实施例无人驾驶车辆的另一工作状态示意图;
图4是本发明另一实施例无人驾驶车辆的整体结构示意图;
图5是本发明另一实施例无人驾驶车辆的部分结构示意图;
图6是本发明另一实施例无人驾驶车辆的升降装置爆炸示意图;
图7是本发明另一实施例无人驾驶车辆的部分结构爆炸另一角度图;
图8是本发明另一实施例无人驾驶车辆的清洁装置爆炸示意图;
图9是本发明实施例控制无人驾驶车辆的方法的流程图;
图10是本发明实施例控制无人驾驶车辆的方法的一具体步骤的流程图;
图11是本发明实施例控制无人驾驶车辆的方法的另一实施例流程图;
图12是本发明实施例控制无人驾驶车辆的方法的步骤S40的一实施例流程图;
图13是本发明实施例控制无人驾驶车辆的方法的步骤S404的一实施例流程图;
图14是本发明实施例控制无人驾驶车辆的方法的一实施例流程图;
图15是本发明一实施例控制无人驾驶车辆的装置的模块图;
附图说明:10、车体;101、收容槽;;20、激光雷达;201、透明壳体;202、雷达本体;30、升降装置;301、丝杆;302、套接组件;3021、上环盖;3021a、第一滑槽;3022、下环盖;3022a、第三滑槽;3023、环形侧板;3023a、开口;3024、环形套;3024a、第二滑槽;3024b、第四滑槽;3024c、外齿环;3025、第一滚珠;3026、第二滚珠;303、升降轴承;304、驱动机构;3041、电机;3042、转动齿轮;40、清洁装置;401、升降机构;402、转动机构;403、锥齿;404、驱动轴承;4041、环形凹槽;405、胶圈;406、连杆;407、环形喷头;50、控制器;501、处理器;502、存储器。
具体实施方式
为了便于理解本发明,下面结合附图和具体实施例,对本发明进行更详细的说明。需要说明的是,当元件被表述“固定于”另一个元件,它可以直接在另一个元件上、或者其间可以存在一个或多个居中的元件。当一个元件被表述“连接”另一个元件,它可以是直接连接到另一个元件、或者其间可以存在一个或多个居中的元件。本说明书所使用的术语“垂直的”、“水平的”、“左”、“右”以及类似的表述只是为了说明的目的。
除非另有定义,本说明书所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本说明书中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是用于限制本发明。本说明书所使用的术语“和/或”包括一个或多个相关的所列项目的任意的和所有的组合。
本发明还提供了一种无人驾驶车辆的实施例,请参阅图1和图2,无人驾驶车辆包括:车体10、激光雷达20、升降装置30、清洁装置40和控制器50。激光雷达20、升降装置30和清洁装置40均设置于车体10上,其中,升降装置30一端连接车体10,另一端连接激光雷达20,可实现对激光雷达20的升降控制,清洁装置40可对激光雷达20外表面进行清洗,控制器可用于控制升降装置30和清洁装置40。
具体的,对于上述车体10和激光雷达20,如图1-4所示,所述车体10的车顶设置有收容槽101和与所述收容槽101连通的滑孔(图未示),所述滑孔位于所述收容槽101的槽底,所述收容槽101用于收容所述激光雷达20,所述滑孔用于连接所述升降装置30。
进一步的,如图5和图6所示,所述激光雷达20包括透明壳体201和雷达本体202,所述雷达本体202收容于所述透明壳体201内,所述透明壳体201收容于所述收容槽101,并且所述透明壳体201可沿所述收容槽101的中轴线往复运动,以使所述激光雷达20收缩于所述收容槽101内或者从所述收容槽101伸出。
在一些实施例中,所述车体设置有与收容槽连通的出液通道(图未示),所述出液通道的一端的端口位于所述收容槽的侧壁,出液通道用于导出所述清洁装置清洗完透明壳体的清洁液。
对于上述升降装置30,如图4、图6和图7所示,升降装置30包括丝杆301、套接组件302、升降轴承303和驱动机构304。所述升降轴承303固定于所述透明壳体201面向所述收容槽101的槽底的一表面,并且所述升降轴承303套接于所述丝杆301的一端,所述丝杆301的另一端收容于所述滑孔,所述套接组件302套接所述丝杆301,并且所述套接组件302与所述丝杆301螺接,所述驱动机构304与所述套接组件302连接,所述驱动机构304用于驱动套接组件302转动,在所述套接组件302转动时,所述丝杆301推动所述透明壳体201沿所述收容槽101的中轴线往复运动。升降装置30用于对激光雷达20进行升降控制,当不需要使用激光雷达20时,升降装置30控制激光雷达20下降至收容槽101内,当需要使用激光雷达20时,升降装置30控制激光雷达20上升并伸出收容槽101,激光雷达20可正常工作。
在一些实施例中,所述套接组件302包括上环盖3021、下环盖3022、环形侧板3023和环形套3024,所述环形侧板3023的两端分别与所述上环盖3021和下环盖3022固定,并且所述环形侧板3023、上环盖3021和下环盖3022围合有环形槽(未标示),所述环形套3024收容于所述环形槽内,并且所述环形套3024可在所述环形槽内转动,所述环形套3024的内表面设置有内齿环(未标示),所述下环盖3022固定于所述收容槽101内,所述丝杆301依次穿过所述上环盖3021、下环盖3022和环形套3024,所述环形套3024的内齿环与所述丝杆301啮合,所述驱动机构304与所述环形套3024连接,所述驱动机构304用于驱动所述环形套3024相对于所述环形槽转动。其中,驱动机构304驱动环形套3024相对环形槽转动,由于转动的环形套3024的内齿与丝杆301啮合,所述环形套3024带动所述丝杆301转动,所述丝杆301在滑孔内转动并同时进行升降运动,升降轴承303固定在激光雷达20上,与丝杆301一端连接的升降轴承303和激光雷达20在丝杆301的带动下进行升降运动。
在一些实施例中,所述套接组件302还包括第一滚珠3025和第二滚珠3026,所述第一滚珠3025安装于上环盖3021和环形套3024之间,可减少上环盖3021与环形套3024之间接触的摩擦力,第二滚珠3026安装于下环盖3022合环形套3024之间,可减少下环盖3022与环形套3024之间接触的摩擦力。
在一些实施例中,所述上环盖3021面向所述环形套3024的一表面设置有第一滑槽3021a,所述环形套3024面向所述上环盖3021一表面设置有第二滑槽3024a,所述第一滚珠3025部分收容于所述第一滑槽3021a,部分收容于所述第二滑槽3024a,第一滑槽3021a和第二滑槽3024a方便第一滚珠3025滚动,可减少上环盖3021和环形套3024的磨损,所述下环盖3022面向所述环形套3024的一表面设置有第三滑槽3022a,所述环形套3024面向所述下环盖3022另一表面设置有第四滑槽3024b,所述第二滚珠3026部分收容于所述第三滑槽3022a,部分收容于所述第四滑槽3024b,第三滑槽3022a和第四滑槽3024b方便第二滚珠3026滚动,可减少下环盖3022和环形套3024的磨损。
在一些实施例中,所述环形侧板3023设置有连通所述环形槽的开口3023a,所述环形套3024的外表面设置有外齿环3024c,所述外齿环3024c,外齿环3024c至少部分裸露于开口3023a,驱动机构304通过开口3023a与外齿环3024c连接。
在一些实施例中,所述驱动机构304包括电机3041和转动齿轮3042,所述电机3041的输出轴与所述转动齿轮3042固定,所述转动齿轮3042通过所述开口3023a与所述外齿环3024c啮合,当电机3041的输出轴转动时,带动转动齿轮3042转动,转动齿轮3042带动环形套3024转动。
对于上述清洁装置40,如图4和图8所示,所述清洁装置40设置于所述收容槽101内,所述清洁装置40用于对所述透明壳体201进行清洁。
进一步的,所述清洁装置40包括升降机构401、转动机构402、锥齿403、驱动轴承404、胶圈405、若干弹性件(图未示)、连杆406、环形喷头407、供水机构(图未示)和导液漏斗(图未示)。所述升降机构401设置于所述收容槽101内,所述升降机构401分别与转动机构402和驱动轴承404的外圈固定,所述升降机构401用于驱动所述转动机构402和驱动轴承404上升或者下降,所述转动机构402的输出轴与所述锥齿403固定,所述驱动轴承404的内圈设置有环状的从动齿(未标示),所述从动齿与所述锥齿403啮合,所述胶圈405固定于所述内圈的内表面,并且所述胶圈405套设于所述透明壳体201上,当所述转动机构402驱动所述锥齿403转动时,所述锥齿403带动所述驱动轴承404的内圈转动,所述驱动轴承404的内圈带动所述胶圈405转动,以使所述胶圈405对所述透明壳体201进行清洁,其中,若干弹性件设置于驱动轴承404的内圈中,可使得胶圈405与透明壳体201保持接触,有效去除透明壳体201上的灰尘。所述连杆406的一端与所述升降机构401固定,所述连杆406的另一端与所述环形喷头407固定,所述环形喷头407环绕所述透明壳体201,所述供水机构与所述环形喷头407连接,所述供水机构用于向所述环形喷头407提供清洁液,所述环形喷头407用于向所述透明壳体201喷洒清洁液。
对于上述的导液漏斗,所述导液漏斗安装于所述收容槽101内,并且所述导液漏斗位于所述激光雷达20的下方,所述导液漏斗的喇叭口朝向所述激光雷达20,所述导液漏斗的出液口与所述出液通道的一端的端口连通,所述导液漏斗用于将清洗完透明壳体的清洁液导向出液通道,再由出液通道导出无人驾驶车辆。
在一些实施例中,为了避免从透明壳体流出的液体沿着丝杆流动,透明外壳面向导液漏斗一端的外表面也可以设置环形导流片(图未示),环形导流片远离透明外壳的一端朝外弯起,并且环形导流片环绕丝杆,环形导流用于将清洁液导导液漏斗。
为了避免导液漏斗影响丝杆,导液漏斗设置开孔,开孔用于供丝杆穿过,并且丝杆可相对于导液漏斗转动。同样的,为了避免导液漏斗内的液体从开孔进入丝杆,导液漏斗还设置有环形凸台(图未示),环形凸台环绕开孔。
在一些实施例中,滑孔位于收容槽的槽底的中部,收容槽的槽底的两侧倾斜设置,以使导液漏斗收集不到的,散落至收容槽的槽底的清洁液流动至收容槽的两侧。进一步的,收容槽的槽底的两侧还设置有连通出液通道的导液孔(图未示),导液孔用于导液漏斗收集不到的,散落至收容槽的槽底的清洁液导入出液通道。
在一些实施例中,所述驱动轴承404的内圈的内表面设置有环形凹槽4041,所述胶圈405固定于所述环形凹槽4041,并且所述胶圈405部分从所述环形凹槽4041伸出。环形凹槽4041用于安装胶圈405。
在一些实施例中,所述胶圈405面向所述收容槽101的槽底的一表面设置有若干斜齿(未标示),当胶圈405转动时,胶圈405上的斜齿会产生流向收容槽101槽底的风,风力可使得清洗完透明壳体的清洁液快速向收容槽101槽底流动。
在一些实施例中,所述环形凹槽4041的槽底有若干第一挡块(图未示),所述若干第一挡块间隔设置,所述第一挡块防止胶圈405打滑,用于固定胶圈405。
在一些实施例中,所述胶圈405面向所述环形凹槽4041的槽底的一表面设置有若干第二挡块(图未示),所述若干第二挡块间隔设置,并且一所述第二挡块抵接一所述第一挡块。由于一第一挡块和一第二挡块抵接,驱动轴承404的内圈在转动过程中,一第一挡块推动一第二挡块转动,可有效防止胶圈405出现打滑的现象。
在一些实施例中,所述若干弹性件均匀设置于所述环形凹槽4041内,并且所述弹性件的一端固定于所述环形凹槽4041的槽底,所述弹性件的另一端与所述胶圈405固定,可使得胶圈405与透明壳体201保持接触,有效去除透明壳体201上的灰尘。
在一些实施例中,所述升降机构401包括第一气缸(未标示)和第二气缸(未标示),所述第一气缸和第二气缸固定于所述收容槽101内,所述第一气缸和第二气缸分别位于所述驱动轴承404的两侧,所述第一气缸分别与所述驱动轴承404的外圈和转动机构402固定,所述第二气缸分别与所述驱动轴承404的外圈和转动机构402固定。
对于上述控制器50,如图2所示,包括至少一个处理器501(图未示)以及存储器502(图未示),所述至少一个处理器501分别与存储器502、雷达本体202、升降装置30和清洁装置40通信连接,其中,所述存储器502存储有可被所述至少一个处理器501执行的指令程序,所述指令程序被所述至少一个处理器501执行,以使所述至少一个处理器501能够执行如下所述的控制无人驾驶车辆的方法。
其中,处理器501和存储器502可以通过总线或者其他方式连接,存储器502作为一种非易失性计算机可读存储介质,可用于存储非易失性软件程序、非易失性计算机可执行程序以及模块,如本发明实施例中的控制无人驾驶车辆的方法对应的程序指令/模块。处理器501通过运行存储在存储器502中的非易失性软件程序、指令以及模块,从而执行控制无人驾驶车辆的方法的装置的各种功能应用以及数据处理,即实现下述方法实施例的控制无人驾驶车辆的方法。
存储器502可以包括存储程序区和存储数据区,其中,存储程序区可存储操作系统、至少一个功能所需要的应用程序;存储数据区可存储根据控制无人驾驶车辆的装置的使用所创建的数据等。此外,存储器502可以包括高速随机存取存储器502,还可以包括非易失性存储器502,例如至少一个磁盘存储器件、闪存器件、或其他非易失性固态存储器件。在一些实施例中,存储器502可选包括相对于处理器501远程设置的存储器502,这些远程存储器502可以通过网络连接至控制无人驾驶车辆的装置。上述网络的实例包括但不限于互联网、企业内部网、局域网、移动通信网及其组合。
所述一个或者多个模块存储在所述存储器502中,当被所述一个或者多个处理器501执行时,执行下述任意方法实施例中的控制无人驾驶车辆的方法,例如,执行以下描述的图9中的方法步骤S10至步骤S50,图10中的方法步骤S21至步骤S22以及图11中的方法步骤S41至步骤S48。
在本发明实施例中,通过在车体的车顶设置有收容槽101,激光雷达20包括透明壳体201和雷达本体202,雷达本体202收容于透明壳体201内,透明壳体201收容于收容槽101,并且透明壳体201可相对于收容槽101运动,以使激光雷达20收缩于收容槽101内或者从收容槽101伸出,其中,升降装置30设置于收容槽101内,升降装置30与透明壳体201连接,升降装置30用于驱动透明壳体201相对于收容槽101运动,此外,清洁装置40设置于收容槽101内,清洁装置40用于对透明壳体201进行清洁,这样设置,用户可在不使用激光雷达20时,利用升降装置30将激光雷达20收容于收容槽101内,避免激光雷达20长时间暴露于空气中,空气中的灰尘沉积在透明壳体201上,并且激光雷达20收容于收容槽101内时,可利用清洁装置40对激光雷达20的透明壳体201进行清洁,非常方便,当需要使用激光雷达20时,再利用升降装置30将激光雷达20伸出收容槽101,激光雷达20正常工作。
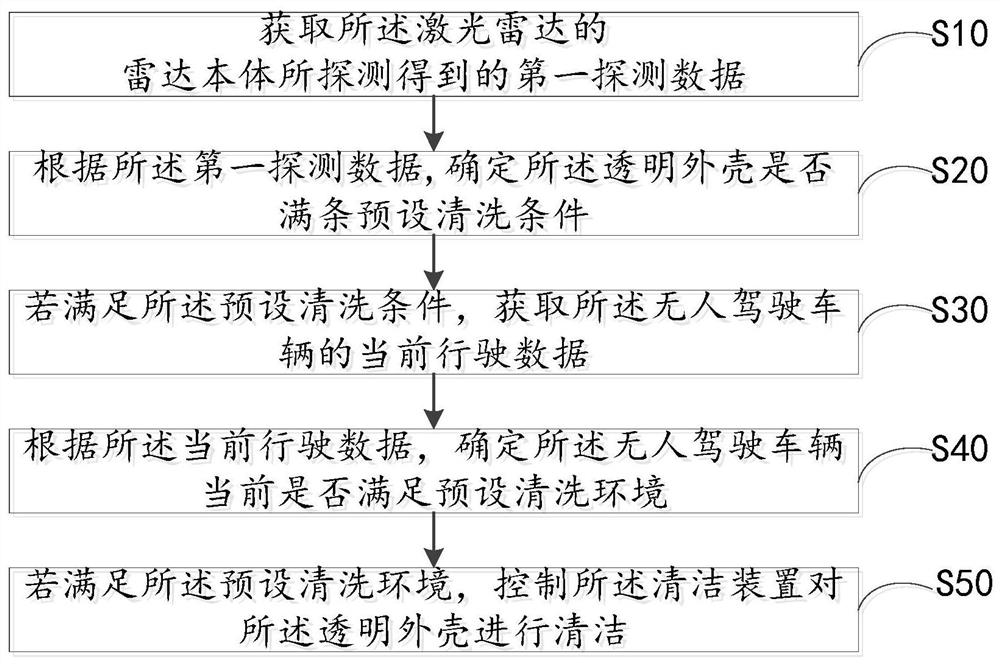
本发明还提供一种控制无人驾驶车辆的方法实施例,该控制无人驾驶车辆的方法应用于上述的无人驾驶车辆,如图9所述,该方法包括以下步骤:
步骤S10,获取所述雷达本体所探测得到的第一探测数据;
第一探测数据包括雷达本体透过透明外壳探测外界的障碍物的数据,其包括障碍物的大小、位置、形状、距离等等信息。
步骤S20,根据所述第一探测数据,确定所述透明外壳是否满条预设清洗条件;
雷达本体是通过发射特定光线以及接收特定光线的反射来探测障碍物,当透明外壳积聚的灰尘严重,或者,其它异物积聚于所述透明外壳时,则积聚的灰尘或者其它异物会反射该特定光线,使得该特定光线无法打到无人驾驶车辆的四周,从而使得激光雷达会检测到灰尘或者异物,而无法完整检测无人驾驶车辆的四周的障碍物的情况,从而影响无人驾驶车辆的安全行驶。
由于积聚于透明外壳的灰尘和异物距离雷达本体的距离都会比无人驾驶车辆四周的正常障碍物近,因此,在一些实施例中,通过雷达本体检测的障碍物与雷达本体的距离来确定透明外壳是否积聚灰尘或者异物,进而确定是否满足预设清洗条件,请参阅图10,根据所述第一探测数据,确定所述透明外壳是否满条预设清洗条件的步骤,包括:
步骤S21,根据所述第一探测数据,确定所述无人驾驶车辆周边的障碍物,并且获取各所述障碍物与所述雷达本体之间的距离;
步骤S22,判断是否存在距离小于预设阈值的障碍物;
预设阈值的具体数值可以根据透明外壳的外表面与雷达本体之间的距离确定。
步骤S23,若存在,则确定所述透明外壳满足预设清洗条件;
步骤S24,若不存在,则确定所述透明外壳不满足预设清洗条件。
当障碍物与所述雷达本体之间的距离小于预设阈值时,则说明此时存在障碍物贴附于透明外壳上,不存在与所述雷达本体之间的距离大于或者等于预设阈值的障碍物,则说明此时不存在障碍物贴附于透明外壳上。而当存在障碍物贴附于激光雷达的透明外壳时,则需要对透明外壳进行清洁。
在一些实施例中,还可设置持续时间,即:当检测到距离小于预设阈值的障碍物时,确定持续检测到该障碍物的持续时间,当持续时间大于预设时间,则确定该障碍物为贴附于透明外壳的障碍物,需要进行对该障碍物进行清洁,即确定满足预设清洗条件。
当然,在一些实施例中,还可以确定距离小于预设阈值的障碍物的面积大小,在面积较小,不影响正常行驶时,可以认定没有满足预设清洁条件,在面积较大影响到正常行驶时,才认定满足预设清洁条件,换而言之,在透明外壳外表面沉积的灰尘量较多,才达到清洗条件,在透明外壳外表面沉积的灰尘量较少,则不满足清洗条件。
步骤S30,若满足所述预设清洗条件,获取所述无人驾驶车辆的当前行驶数据;
其中无人驾驶车辆的当前行驶数据指的是无人驾驶车辆的状态,例如:行驶状态、泊车状态。
步骤S40,根据所述当前行驶数据,确定所述无人驾驶车辆当前是否满足预设清洗环境;
满足预设清洗环境指的是清洗不会无人驾驶车辆的安全造成影响,例如:处于行驶状态的车辆,此时进行清洁,会对激光雷达造成更大的影响,进一步影响无人驾驶车辆的安全行驶。
步骤S50,若满足所述预设清洗环境,控制所述清洁装置对所述透明外壳进行清洁。
当满足预设清洗环境时,便可控制清洁装置对透明外壳进行清洁,有利于保障无人驾驶车辆的安全。
在一些实施例中,如图11所示,根据所述当前行驶数据,确定所述无人驾驶车辆当前是否满足预设清洗环境的步骤,包括:
步骤S41,根据所述当前行驶数据,判断所述无人驾驶车辆是否处于泊车状态;
步骤S42,若处于所述泊车状态,则确定所述无人驾驶车辆当前满足预设清洗环境;
步骤S43,若不处于所述泊车状态,则确定所述无人驾驶车辆当前不满足预设清洗环境。
当无人驾驶车辆处于泊车状态,无人驾驶车辆处于停止状态时,即使对透明外壳进行清洁,影响到激光雷准确探测无人驾驶车辆四周的障碍物,也不会影响无人驾驶车辆的安全。此外,通常当无人驾驶车辆处于泊车状态时,无人驾驶车辆无需要使用激光雷达的数据,通常也会将激光雷达关闭,因此,清洗激光雷达,也不会对激光雷达造成任何影响。
请参阅图11,图11是本发明控制无人驾驶车辆的方法第二实施例的流程图,本实施例与其它实施例不同之处在于,方法还包括:
步骤S44,若不满足所述预设清洗环境,向地图服务器发送地图请求指令;
步骤S45,接收所述地图服务器根据地图请求指令返回的电子地图;
步骤S46,在所述电子地图中定位距离所述无人驾驶车辆最近的泊车点;
步骤S47,控制所述无人驾驶车辆行驶至所述泊车点;
步骤S48,在所述无人驾驶车辆停泊至所述泊车点后,返回所述根据所述当前行驶数据,确定所述无人驾驶车辆当前是否满足预设清洗环境的步骤。
当不满足预设清洁环境时,无人驾驶车辆寻找条件满足预设清洁环境,通过向地图服务器发送地图请求指令,可获得电子地图,根据无人驾驶车辆在电子地图中的位置,定位与无人驾驶车辆距离最近的泊车点,控制无人驾驶车辆行驶至泊车点,在无人驾驶车辆停泊至泊车点后,再确定是否满足预设清洗环境。
在一些实施例中,如图11所示,在控制所述无人驾驶车辆行驶至所述泊车点的过程中,方法还包括:
步骤S471,控制所述无人驾驶车辆的报警灯亮起。
报警灯亮起用于提示周围车辆本车的探测装置不完整,提示周围车辆尽量避免靠近本车辆,以免造成安全事故。
在一些实施例中,如图11所示,在控制所述无人驾驶车辆行驶至所述泊车点的过程中,方法还包括:
步骤S472,向周边的车辆广播数据请求;
步骤S473,接收周边的车辆根据所述数据请求,返回的用于探测障碍物的第二探测数据;
步骤S474,根据所述第二探测数据,对所述雷达本体所探测得到的第一探测数据进行修正;
步骤S475,根据修正后的第一探测数据,控制所述无人驾驶车辆行驶。
其中,根据接收周边车辆的数据请求,获得无人驾驶车辆与周边障碍物距离的第二探测数据,根据第二探测数据对第一探测数据进行修正,之后,根据修正后的第一探测数据,可以提高第一探测数据的完整性,从而有利于保障无人驾驶车辆可以安全行驶至泊车点,避免无人驾驶车辆与周边障碍物发生事故。
在一些实施例中上,如图12所示,根据所述当前行驶数据,确定所述无人驾驶车辆当前是否满足预设清洗环境的步骤,包括:
步骤S401,根据所述当前行驶数据,判断所述无人驾驶车辆是否处于停车状态;
步骤S402,若是,获取所述无人驾驶车辆的行驶路线,并且根据所述行驶路线确定所述无人驾驶车辆的前方是否存在交通灯;
无人驾驶车辆停车可能是拥堵停车,又或者,等待交通灯停车,而拥堵停车时,道路疏通的时间是不确定的,无人驾驶车辆会随时启动,而清洁对激光雷达的干扰会比平时的干扰要严重,如果无人驾驶车辆在清洁中,道路疏通,无人驾驶车辆启动行驶的话,安全性会更差,不启动行驶的话,又会造成交通拥堵。而等待交通造成的停车,等待时间是可以获取的,无人驾驶车辆选择在等待交通灯时,其清洁时间是可控的。
步骤S403,若存在所述交通灯,则获取所述交通灯的信息;
步骤S404,根据所述交通灯的信息,确定所述无人驾驶车辆当前是否满足预设清洗环境。
步骤S405,若是,则所述无人驾驶车辆当前满足预设清洁环境;
步骤S406,若否,则所述无人驾驶车辆当前不满足预设清洁环境。
由于无人驾驶车辆在进行清洁的时侯,需要一定的时间,如果无人驾驶车辆等待的时间过短,无人驾驶车辆还没有来得及完成清洁的话,无人驾驶车辆只能在原地等待,会造成交通拥堵,因此,无人驾驶车辆在等待交通灯时还需要考虑等待交通灯的时间是否满足,具体的,如图13所示,所述根据所述交通灯的信息,确定所述无人驾驶车辆当前是否满足预设清洗环境的步骤,进一步,包括:
步骤S4041,判断所述交通灯的指示信号是否为禁止通行信号;
禁止通行信号是指交通灯呈现为红色或者黄色,允许通行信号是指交通灯呈现为绿色。
当无人驾驶车辆停止,并且前方的交通灯是禁止通行信号,则说明无人驾驶车辆是在等待交通灯。当然,在一些实施例中,还可以验证自无人驾驶车辆当前位置至交通灯的位置之间的路段,是否都是仍次排布车辆或者处于拥堵状态,若是,则说明当前是在等待交通灯。
步骤S4042,若是,则获取所述交通灯的指示信号由禁止通行信号转换为允许通行信号所需要的转换时间;
对于交通灯的指示信号和转换时间等信息,可以从管理交通灯的服务中心获取。
步骤S4043,若否,所述车辆直接通行;
步骤S4044,判断所述转换时间是否大于或者等于预设时间;
预设时间的具体数值不作限定,可以根据实际情况设置,例如:设置成30秒,15秒等。当然,在一些实施例中,也可以建立预设时间和激光雷达的污染程度的模型,预设时间根据检测到激光雷达的污染程度而变化。
步骤S4045,若大于所述预设时间,则确定所述无人驾驶车辆当前满足预设清洗环境;
步骤S4046,若否,所述无人驾驶车辆不满足预设清洁环境。
通过在无人驾驶车辆在等待所述交通灯的允许通行信号,并且所述交通灯的指示信号由禁止通行信号转换为允许通行信号所需要的转换时间大于或者等于预设时间,才执行清洁,避免清洁时间不足,影响清洁效果,或者,影响交通的正常通行。
在一些实施例中,如图14所示,在所述控制所述清洁装置对所述透明外壳进行清洁的步骤之后,所述方法还包括:
步骤S60,检测所述透明外壳的清洁程度;
步骤S61,判断所述清洁程度是否大于或等于预设阈值;
步骤S62,若大于或等于所述预设阈值,则确定所述透明外壳清洁完成。
其中,透明外壳的清洁程度可通过雷达本体发射特定光线以及接收特定光线的反射来来判断,例如:当清洁装置清洁完成过后,透明外壳上仍具有较多灰尘时,此时,雷达本体发射出的特定数量的特定光线会被灰尘遮挡反射回雷达本体,若雷达本体接收的特定光线的数量与发射出的特定光线的数量接近或在接近范围内,说明透明外壳的清洁程度较低,若雷达本体发射出的特定光线的数量与接收的特定光线的数量差别较大,说明透明外壳的清洁程度较高。或者,通过设置摄像头,由摄像头拍摄激光雷达的透明外壳的图像,并且根据图像来识别清洁程度。
本发明实施例的有益效果是:区别于现有技术的情况,本发明实施例首先获取雷达本体所探测得到的第一探测数据,之后根据所述第一探测数据,确定所述透明外壳是否满条预设清洗条件,若满足所述预设清洗条件,获取所述无人驾驶车辆的当前行驶数据,然后根据所述当前行驶数据,确定所述无人驾驶车辆当前是否满足预设清洗环境,最后,若满足所述预设清洗环境,控制所述清洁装置对所述透明外壳进行清洁,有利于避免透明外壳上积聚的灰尘或者异物,影响到激光雷达探测无人驾驶车辆四周的障碍物,从而影响无人驾驶车辆行车安全。
本发明还提供了一种控制无人驾驶车辆的装置的实施例,如图15所示,控制无人驾驶车辆的装置70包括:第一获取模块71、第一分析模块72、第二获取模块73、第二分析模块74以及控制模块75。其中,第一获取模块用于获取雷达本体所探测得到的第一探测数据;第一分析模块,用于根据第一探测数据,第一分析模块确定透明外壳是否满足预设清洗条件;第二获取模块,用于若满足预设清洗条件,第二获取模块获取无人驾驶车辆的当前行驶数据;第二分析模块,根据当前行驶数据,第二分析模块用于确定无人驾驶车辆当前是否满足预设清洗环境;控制模块,若满足预设清洗环境,控制模块用于控制清洁装置对透明外壳清洁。
以上所述仅为本发明的实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
- 无人驾驶车辆的控制方法及控制装置、无人驾驶车辆
- 无人驾驶车辆的控制方法及控制装置、无人驾驶车辆