便携式图像形成装置和便携式图像形成装置主体
文献发布时间:2023-06-19 10:46:31
技术领域
本发明涉及便携式图像形成装置和便携式图像形成装置主体。
背景技术
已知一种便携式图像形成装置,该便携式图像形成装置包括:将图像记录在记录材料上的记录部;用于检测装置位置的位置检测器和用于检测是否存在记录材料的记录材料检测器中的至少一个;以及具有图像形成材料容纳部的容纳单元。例如,JP-2001-315385-A公开了一种便携式图像形成装置,其包括位置检测器(旋转检测传感器),记录材料检测器(打印物体检测传感器)和容纳单元(头盒)。
引文列表
专利文献
【专利文献1】JP-2001-315385-A
发明内容
技术问题
在JP-2001-315385-A中公开的便携式图像形成装置中,位置检测器和记录材料检测器配置在容纳单元的宽度方向的外侧。因此,宽度方向的尺寸增加,这导致便携式图像形成装置的安装空间的尺寸增加。
解决问题的方案
便携式图像形成装置包括记录部,位置检测装置和记录材料检测装置的至少一个,以及容纳单元。记录部配置为将图像记录在记录材料上。位置检测装置配置为检测便携式图像形成装置的位置。记录材料检测装置配置为检测记录材料的有无。容纳单元包括图像形成材料容纳部。所述位置检测装置和所述记录材料检测装置中的至少一个相对平行于与所述记录材料对向的记录面的虚拟平面的投影区域,与所述容纳单元相对所述虚拟平面的投影区域至少部分地重叠。
本发明的效果
根据本发明,显表示能够减小便携式图像形成装置的安装空间的显着效果。
附图说明
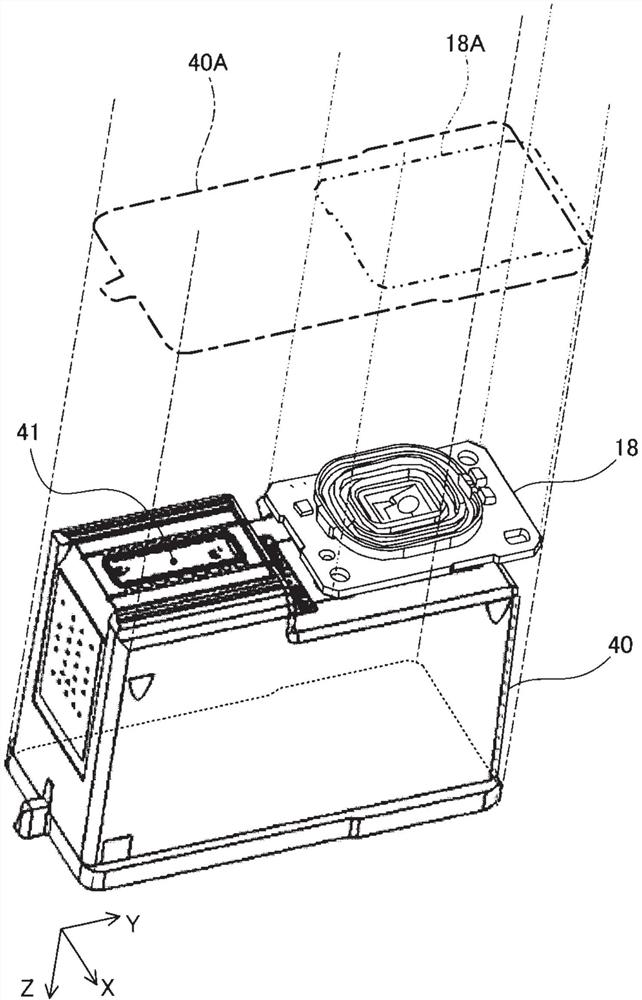
图1是表示盒投影区域和传感器投影区域的图。
图2是从背面的左斜上方观察的HMP的外观立体图。
图3是HMP的仰视图。
图4是当从左侧观察HMP时的示意性截面图。
图5是表示当操作HMP时用户的手和HMP之间的位置关系的视图。
图6是表示通过HMP在记录纸上形成图像的状态的图。
图7是表示HMP的电路的一部分的框图。
图8是从前表面的左斜上方观察时的HMP的外观立体图。
图9是其中上部单元设置为打开状态的HMP的外观立体图。
图10是在弹出墨盒的状态下的HMP的立体图。
图11A和图11B是当从斜下方观察时的HMP的立体图。图11A是整体的外观立体图,图11B是仅墨盒和位置检测传感器的立体图。
图12是表示确定HMP中的Y轴方向和Z轴方向的位置的配置的示意性截面图。
图13是墨盒的下端附近的放大立体图。
图14是通过图3的A-A截取的HMP的下端附近的截面图。
图15是当从左侧看时的变形示例1的HMP的示意性截面图。
图16是表示作用在图12所示的HMP的墨盒上的力的示意性截面图。
图17A至图17C是加压板的俯视图,图17A是表示矩形加压板的视图,图17B是表示椭圆形加压板的视图,图17C是表示长圆型(oval-shaped)加压板的视图。
图18是当从左侧观察时的变形示例2的HMP的示意性截面图。
图19是表示变形例2的HMP的压板倾斜的状态的图。
图20是在上部单元关闭的状态下的HMP的示意性截面图。
图21是在开放上部单元中途的HMP的示意性截面图。
图22是在上部单元打开的状态下的HMP的示意性截面图。
图23是通过图12的E-E截取的HMP的示意性截面图。
图24是从斜下方观察时的墨盒的外观立体图。
图25是表示传感器投影区域的整体配置成位于盒投影区域内侧的构造的视图。
具体实施方式
在下文中,将给出对第一实施例的描述,在第一实施例中,本发明应用于作为便携式图像形成装置的便携式移动打印机(在下文中,称为“HMP 1”)。首先,将描述根据实施例的HMP 1的基本配置。
图2是从背面的左斜上方观察的HMP1的外观立体图。图3是HMP1的仰视图。如图2所示,HMP1主要包括上部单元2和下部单元3。HMP1整体上具有大致长方体的形状,并且HMP1在扫描方向(=打印方向:图中的X轴方向)的长度设置为用户用手能握持的程度。
如图2所示,将HMP1的主体的左右方向(短边方向)设定为X轴方向,将与该X轴正交的主体的长边方向设定为Y轴方向。在使用HMP1的打印操作中,在线性打印字符、图案等的情况下,HMP1沿X轴方向(扫描方向)移动。另外,HMP1向Y轴方向移动使其改行。但是,使用HMP1的打印操作不限于上述操作。在考虑设计来配置字符、图案等的情况下,可以通过使得HMP1沿除X轴方向以外的倾斜方向或沿着曲线移动执行打印。另外,可以通过使得HMP1移动到Y轴方向以外的方向来改行。
图4是当从左侧观察HMP1时的示意性截面图。如图4所示,上部单元2具有L形,该L形包括在Y轴方向上延伸的水平延伸部2a和在Z轴方向上延伸的垂直延伸部2b。作为向HMP1的各设备供电的电源,电池15设置在上部单元2的垂直延伸部2b的内部。控制基板14配置在水平延伸部2a中,控制基板14连接有打印键5a和电源键5b。电源键5b是用于切换HMP1的电源开/关的按钮,打印键5a是用于操作墨水排出时间的按钮。
下部单元3包括可旋转地支撑上部单元2的上部单元旋转轴3a,位置检测传感器18,柔性印刷电路(FPC)端子13,上部单元锁定爪11,以及保持上述各部分的壳体80等。位置检测传感器18是检测位置坐标和打印对象的有无的光学传感器(反射型)。另外,一体地包括记录部41(图像形成部)和墨罐的墨罐一体型的墨盒40(喷墨头)相对于下部单元3的壳体80以可拆卸的方式容纳在下部单元3的壳体80内。墨盒40通过从记录部41排出墨水的液滴形成图像,当墨盒40安装到HMP1的状态下使用时,排出墨水液滴的记录部41向着垂直方向下方。
上部单元2相对下部单元3,以上部单元旋转轴3a为中心旋转自如地嵌合。当上部单元2相对下部单元3沿图4中的箭头“B”方向旋转时,下部单元3的壳体80的上部开口暴露,能卸下配置在壳体80内部的墨盒40。
在本实施例的HMP1中,电池15设置在上部单元2的垂直延伸部2b中,该垂直延伸部2b位于覆盖下部单元3的正面侧(图4中的右侧),使得电池15位于墨盒40的正面35侧。因此,与使得重量大的电池15位于墨盒40的上方的构造相比,HMP1的高度设置得较低。因此,可以降低HMP1的重心位置,可以抑制在移动时HMP1的倾覆。
HMP1在扫描方向(X轴方向)的尺寸(装置宽度)比墨盒40的宽度稍宽。当装置宽度设置得尽可能小时,在记录纸P的表面上,能扩大使得HMP1在扫描方向移动操作的范围,能尽可能扩大记录纸P的表面上的可记录范围。
HMP1包括作为相对面的记录面30(下表面),所述相对面使得墨盒40的记录部41面对诸如纸的记录材料。另外,HMP1包括与该记录面30相对的上表面31和在与扫描面正交的方向即扫描正交方向(图中的Y轴方向)延伸的左侧面32。HMP1还包括在扫描正交方向(图中的Y轴方向)延伸的右侧面33,在扫描方向(图中的X轴方向)延伸的背面34,以及在扫描方向延伸的正面35等。HMP1以记录面30向着垂直方向下方、上表面31向着垂直方向上方的姿势使用。
打印键5a和电源键5b设置在上表面31的外边缘内(在框架中)。此外,通用串行总线(USB)连接端口9设置在上部单元2的左侧面32。USB连接端口9用于连接USB电缆。电力通过连接到USB连接端口9的USB电缆从外部电源供给安装在HMP1中的充电型电池15,以对电池15充电。
如图2和图4所示,L形的上部单元2配置为覆盖下部单元3的上表面31侧和正面35侧,上部单元2成为比下部单元3宽度(X轴方向的长度)宽的形状。图5是表示当用户操作HMP1时用户的手H与HMP1之间的位置关系的视图。
如图5所示,当在记录纸P的表面上沿扫描方向(图中的X轴方向以及图5的左右方向)移动HMP1以形成图像时,用户握持上部单元2的同时移动HMP1。上部单元2的宽度大于下部单元3的宽度。因此,成为用户易用手握持的形状,并且能将垂直延伸部2b作为电池15的容纳部。另外,如图2所示,在下部单元3的左侧面32和右侧面33分别形成凹状的握持部39。握持部39形成在当用户握持HMP1使用时握持上部单元2的手H的手指所碰到的位置(通常是拇指和中指或无名指分别碰到的位置)。当用户将手指放在左侧面32和右侧面33的各握持部39,HMP1夹于握持部39之间,夹持HMP1,用户可以稳定地握持HMP1。
在HMP1中,用户可以通过长时间按下电源键5b来打开/关闭电源。在接通电源的状态下,可以通过使用与智能手机等的外部装置的蓝牙(注册商标)之类的无线通信,对于设置在HMP1的上部单元2内的控制基板14获取图像信息。
图6是表示通过HMP1在记录纸P上形成图像的状态的图。在使控制基板14获取图像信息之后,以使得记录面30与记录纸P的表面对向的姿势,将HMP1放置在记录纸P的表面上。此后,在按压一次打印键5a之后,如图6所示,HMP1沿扫描方向(X轴方向)移动,以在记录纸P的表面上形成图像。如图6所示,在使用HMP1的图像形成中,可以在一边确认打印的打印部W1和将要打印的打印预定部W2,一边进行打印。
HMP1可以通过用户的移动操作(手动扫描)当朝扫描方向(图中的X轴方向)的一侧(图6中的右方向)向前移动时以及朝另一侧(图6中的左方向)返回移动时,在记录纸P的表面形成图像。从墨盒40排出墨水可以在按压一次打印键5a离开之后连续进行,也可以仅仅在用户按压打印键5a期间进行。作为记录材料,不限于诸如记录纸P的纸,记录材料的示例包括高射投影片(OHP),布,纸板,包装容器,玻璃,基板等。
如图3所示,在形成下部单元3的记录面30的面(壳体80的下表面),设置有排出开口部30a,该排出开口部30a用于使得安装在下部单元3内的墨盒40的记录部41露出到外部。墨盒40的记录部41包括多个排出口41a,通过驱动压电元件,从各排出口41a个别地排出墨滴。记录部41的图像记录区域的宽度(与扫描方向正交的方向(Y轴方向)的图像长度)与多个排出口41a的位于Y轴方向两端的排出口41a之间的距离相对应。从记录部41的排出口41a排出的墨通过排出开口部30a到达记录纸P,进行图像形成。
在墨盒40中,作为用于排出墨水的驱动源,可以使用层压型压电元件、薄膜型压电元件等的机电转换元件(压电致动器等)。另外,作为驱动源的另一种结构,可以使用诸如发热电阻体的电热转换元件、由振动板和对电极构成的静电致动器等。
作为从墨盒40排出诸如墨水的液体或液滴执行记录的所谓喷墨机构,可以采用公知的构造。另外,作为喷墨机构,只要能够将喷墨机构安装在HMP1中,就可以适当地采用任意的喷墨机构。在本实施方式的HMP1中,喷墨机构相当于在记录纸P记录图像的记录部41,该记录部41容纳在下部单元3的壳体80内。
从记录部41的排出口41a排出的墨水(液体)只要是具有能够从排出口41a排出的粘度或表面张力的液体即可,没有特别限定。但是,优选在常温常压下通过加热或冷却使粘度为30[mPa·s]以下。更具体地说,墨水(液体)的实例包括含有溶剂(例如水或有机溶剂)、着色剂(例如染料和颜料)、聚合性化合物、树脂、赋予功能的材料(例如表面活性剂)、生物适合材料(例如脱氧核糖核酸(DNA),氨基酸,蛋白质,和钙)、可食用材料(例如天然色素)等的溶液,悬浮液,乳液等。它们可以用于诸如喷墨用墨水、表面处理液、电子元件或发光元件的构成要素或电子电路抗蚀剂图案的形成用液、以及三维成型用材料液等的用途使用。
如图3所示,在记录面30的外缘的内侧,设有作为位置检测装置的位置检测传感器18,该位置检测传感器18以非接触方式检测HMP1在记录纸P上的位置。在形成记录面30的壳体80的下表面形成检测开口302,位置检测传感器18的检测器通过该检测开口302暴露。在使用旋转编码器等的接触型传感器中,需要使传感器与打印面接触,因此,很可能由于接触状态引起检测误差。具体地说,当接触型传感器的检测器相对打印面离开或在打印面上滑动时,实际移动方向和实际移动距离与基于检测结果计算的移动方向和移动距离不同,因此,发生检测误差。相反,当通过使用光学型传感器作为位置检测传感器18,以非接触方式检测打印面时,可以高精度地检测移动方向和移动距离。
另外,如图3所示,第一左辊37a,第二左辊37b,第一右辊38a和第二右辊38b形成为能够相对于壳体80旋转,设在记录面30的外缘内。第一左辊37a和第二左辊37b固定到左旋转轴37c,左旋转轴37c保持为可相对于壳体80旋转。类似地,第一右辊38a和第二右辊38b固定到右旋转轴38c,右旋转轴38c保持为相对于壳体80可旋转。
当用户沿扫描方向移动HMP1时,与记录纸P的表面接触的四个辊(37a,37b,38a和38b)像轮胎一样旋转。当设置有辊时,用户可以使HMP1沿着HMP1的扫描方向直进。另外,当使HMP1沿着扫描方向直进时,与记录纸P的表面或放置记录纸P的平台的表面接触的仅仅是设在HMP1的四个辊(37a,37b,38a和38b),不使得记录面30与记录纸P的表面接触。因此,用户可以一边使HMP1沿着扫描方向直进,一边将墨盒40的记录部41和记录纸P的表面之间的距离保持一定,因此,可以形成期望的高图像质量的图像。即,四个辊用作移动辅助装置,该移动辅助装置引导HMP1在扫描方向上的移动,辅助在扫描方向上的直进移动。
位置检测传感器18是检测直到记录纸P的表面为止的距离或表面状态(例如,凹凸)或检测HMP1的移动距离的传感器。例如,可以利用在个人计算机的光学型鼠标(指示装置)中使用的同样者。位置检测传感器18用光照射放置场所(记录纸P),将该部分的状态读取为“图案”。并且,位置检测传感器18连续检测“图案”相对于位置检测传感器18的动作如何移动,计算移动量。作为位置检测传感器18,可以使用任意的传感器,只要该传感器能够以非接触方式检测相对于记录纸P的位置的变化,则也可以使用超声波传感器等的光学传感器以外的传感器。另外,作为可适用本发明的诸如HMP1的便携式图像形成装置设有的位置检测装置,不限于诸如位置检测传感器18那样的非接触式传感器,也可以使用旋转编码器等的接触式传感器。
图7是表示HMP1的电路的一部分的框图。控制基板14包括执行各种操作处理或程序执行的中央处理单元(CPU)55,使用蓝牙(注册商标)的近距离无线通信用的Bt基板52,临时存储数据的随机存取存储器(RAM)53,只读存储器(ROM)54,记录控制器56等。控制基板14在上部单元2的中空内,固定在USB连接端口9的内侧的位置。
Bt基板52通过与诸如智能手机或平板终端的外部设备的近距离无线通信执行数据通信。另外,ROM54存储执行HMP1的硬件控制的固件、墨盒40的驱动波形数据等。另外,记录控制器56执行用于驱动墨盒40的数据处理,或者生成驱动波形。
陀螺仪传感器58,位置检测传感器18,温度传感器19,发光二极管(LED)灯59,墨盒40,打印键5a,电源键5b,电池15等与控制基板14电连接。陀螺传感器58通过已知技术检测HMP1的倾斜或旋转角度,将结果传送到控制基板14。LED灯59设置在打印键5a中的由透光材料构成的外装罩的内部,使打印键5a发光。
当按下电源键5b,接入HMP1的电源时,电力提供给各模块,CPU55基于存储在ROM54中的程序启动激活操作,将程序或各数据展开到RAM53。当通过近距离无线电通信从外部设备接收要形成图像的图像数据时,记录控制器56生成与接收到的图像数据相对应的驱动波形。另外,记录控制器56控制从墨盒40排出墨水,从而形成与位置检测传感器18检测到的记录纸P的表面上位置相对应的图像。
通过位置检测传感器18检测HMP1的移动方向、移动速度、和移动距离,基于该检测结果调整墨水的排出量和排出位置,打印目标图像。另外,可以通过使用设置在壳体80的左侧面32和右侧面33的副扫描引导件7以及设置在壳体80的背面34的主扫描引导件10调节排出开始位置。详细地说,可以通过使用主扫描引导件10将HMP1相对于记录纸P的位置在主扫描方向(图中的X轴方向)对齐,通过使用副扫描引导件7使HMP1相对于记录纸P的位置在副扫描方向(图中的Y轴方向)对齐,调节排出开始位置。
另外,当通过与外部设备的近距离无线电通信获取图像数据时,控制基板14使LED灯59闪烁,以使具有透光性的打印键5a发光闪烁。看到闪烁的用户可以知道HMP1终止了图像数据的获取,将HMP1放置在记录纸P上,按下打印键5a。
另一方面,当启动LED灯59的闪烁控制时,控制基板14等待按下打印键5a。并且,当按下打印键5a时,控制基板14连续点亮LED灯59,以使打印键5a连续发光。看到连续发光的用户开始在HMP1的扫描方向的移动操作(手动扫描)。
终止HMP1的移动操作(手动扫描)的用户再次按下打印键5a。由此,控制基板14关闭LED灯59,停止打印键5a的发光。另外,有时可以不按下打印键5a,将HMP1从记录纸P提起,原样放置在桌子等上,或者可以安装到覆盖记录面30的盖构件而放置。上述场合,当从记录纸P上提起HMP1时,位置检测传感器18无法检测到位置。控制基板14在位置检测传感器18未检测到位置时,使得LED灯59熄灯,停止打印键5a发光。看到停止发光的用户可以把握HMP1的打印处理已终止。
在该实施例的HMP1中,在移动操作(手动扫描)期间,用户没有必要连续按压打印键5a。当在移动操作之前按下打印键5a离开,直到预定时间为止持续打印处理。作为预定时间,可以列举例如基于位置检测传感器18的检测结果的图像形成结束的时间,再次按下打印键5a的时间,或者不能由位置检测传感器18进行位置检测的时间。
当图像形成终止后等不执行图像形成时,将作为覆盖HMP1的记录面30的盖部件的加盖单元安装到HMP1。由此,可以防止墨水排出口41a中的墨水干燥。
接下来,将给出本实施例的HMP1的上部单元2的形状的描述。HMP1包括下部单元3和上部单元2。下部单元3是具有记录部41的装置主体。记录部配置面(壳体80的下表面)配置下部单元3中的记录部41,上部单元2是打开或关闭上述记录部配置面的相反侧的记录部相反面(壳体80的上部的开口)的盖部件。
如图2和图4所示,上部单元2为具有水平延伸部2a和垂直延伸部2b的L形。水平延伸部2a覆盖壳体80的上侧,该上侧成为下部单元3中的配置记录部41的壳体80的下表面的相反侧。此外,垂直延伸部2b从水平延伸部2a向记录部配置面侧(下侧)延伸,覆盖下部单元3中的下表面和上表面的侧面(左侧面32,右侧面33,背面34和正面35)的至少一部分。
在本实施例的HMP1中,作为盖部件的上部单元2具有L形,包括从水平延伸部2a延伸到记录面侧(朝下侧)的垂直延伸部2b。由于设置了垂直延伸部2b,因此,不仅水平延伸部2a,而且垂直延伸部2b也可以用作在打开或闭合操作期间与手接触提供打开或闭合力的部位。因此,可以握持HMP1中的记录面30的相反侧的水平延伸部2a和相对记录面30成为侧方的垂直延伸部2b的一方或两方的、易于给与开闭力处,进行开闭操作,能提高上部单元2的开闭操作的操作性。
如图4所示,在本实施例的HMP1中,电池15配置在上部单元2的L字型中的HMP1的作为上下方向延伸部分的垂直延伸部2b。由此,能使得重量较重的电池15不是配置在下部单元3的上方,而是配置在下部单元3的侧方。另外,可以将比重较大的电池15的长边方向配置在HMP1的高度方向。因此,可以降低装置整体的重心,因此,HMP1不太可能翻倒。结果,能实现提高用户的操作性的构成。以这种方式,改善用户的可操作性,可以防止由于HMP1的可操作性的劣化而导致的打印图像的劣化。
与记录纸P的表面平行的X-Y平面中的头的位置(打印位置),从用户操作性的观点考虑,优选配置在HMP1的长度方向(Y轴方向)的背面34侧。其原因在于,当将打印位置配置在HMP1的长度方向的背面34侧时,当使得印刷物的下部成为用户的前侧进行打印时,可以减小印刷物上部的空白。通常,印刷物大多按顶部对齐书写,因此,与印刷物的下部相比,优选使印刷物上部的页边空白较小。由此,头的位置(打印位置)优选配置在HMP1的长度方向中的背面34侧。
作为便携式图像形成装置,优选具备将盖部件相对装置主体固定的锁定机构(本实施方式的上部单元锁定爪11),使得在执行图像形成的操作中不开闭盖部件。然而,当将盖部件仅仅配置在装置主体的上侧时,成为锁定机构的操作部配置在装置主体的侧面(右侧面,左侧面,正面,和背面)或装置主体的上表面的结构。在该结构中,在将装置放置在纸面上的状态下,使用者可能会与锁定机构的操作部接触,因此,担心使用者可能在图像形成操作过程中错误地操作锁定机构而导致盖部件开放。
在本实施例的HMP1中,垂直延伸部2b的下端部形成HMP1的记录面30的一部分,从垂直延伸部2b的下端部的上表面31侧向着记录面30侧的方向(下方)的位置成为与壳体80的下表面相同的位置。排出开口部30a设置在壳体80的下表面,在HMP1中的设有排出开口部30a的面、即记录面30,配置作为锁定机构的上部单元锁定爪11。上部单元锁定爪11爪是用于解除上部单元2相对下部单元3的固定的操作的操作部。
设置有排出开口部30a的记录面30是HMP1的下表面,在将HMP1放置在记录纸P上的状态下,记录面30面对纸表面,因此,可以防止用户与设置在记录面30的上部单元锁定爪11接触。由此,可以防止用户在图像形成期间(打印操作中)错误地操作上部单元锁定爪11。因此,可以防止由于错误操作而引起的上部单元2开放。
另外,当将上部单元锁定爪11设置在HMP1的下表面时,并不局限于打印操作中,能防止用户在用户手尚未握持时等、不希望的时间与上部单元锁定爪11接触。由此,可以减少发生在用户不希望的时间开放上部单元2的不良状况的可能性。
作为能够防止用户在图像形成操作期间错误地操作锁定机构的构造,并不局限于垂直延伸部2b的下端部成为与壳体80的下表面相同位置的构造。如果是设有垂直延伸部2b的形状,通过在成为垂直延伸部2b的下端部的下表面或与该下表面相邻的壳体80的侧面配置锁定机构,由于垂直延伸部2b,可以防止使用者与锁定机构接触。通过防止与锁定机构的接触,可以防止用户在图像形成操作期间错误地操作锁定机构。
本实施例的HMP1在左侧面32和右侧面33的每一个中设有握持部39。作为握持部39,优选设置在成为HMP1的Y-Z平面中的重心的位置。详细地说,配置使得HMP1的Y-Z平面中的重心位于Y-Z平面中的握持部39的内侧。用户握持HMP1时将手指放在握持部39,通过将握持部39设置在HMP1的重心位置,能使得用户握持HMP1的重心附近,进行操作,由此,能实现用户的平稳操作。
接下来,将给出本实施例的HMP1的墨盒40的取出操作的描述。图8是从左正面侧上方观察HMP1的外观立体图,图9是从图8所示状态相对下部单元3使得上部单元2朝图4中箭头“B”方向旋转状态的HMP1的立体图。如图3和图4所示,上部单元锁定爪11设置在HMP1的记录面30中的下部单元3(外壳80的下表面)和上部单元2(垂直延伸部2b的下表面)之间的边界附近。通过操作使得上部单元锁定爪11沿图4中的箭头“C”方向移动,解除上部单元2相对下部单元3的固定。在解除固定的状态下,如图9所示,通过使得上部单元2相对下部单元3以上部单元旋转轴3a为中心沿图4中的箭头“B”方向旋转,上部单元2相对下部单元3成为开状态。
如图9所示,通过将上部单元2设为开状态,墨盒40和盒装卸机构12露出。另外,如图9所示,在上部单元2的内面,固定盒推压部件21,用于推压安装在下部单元3内的墨盒40并卡定。
图10是操作图9所示状态的HMP1的盒装卸机构12的装卸操作部12a、使得墨盒40弹出状态的HMP1的立体图。在该状态下,操作处于图9所示状态的HMP1的盒装卸机构12的装卸操作部12a使得墨盒40弹出。如图10中的箭头“D”所示,当将盒装卸机构12的装卸操作部12a拉向正面侧时,墨盒40从图9所示的状态弹出到上方,成为图10所示状态。由此,成为可以取出墨盒40的状态。
接下来,将描述HMP1中的墨盒40和位置检测传感器18之间的位置关系。图11A和图11B是当从斜下方观察时的HMP的立体图。图11A是还包括上部单元2和下部单元3的结构体的HMP1整体的外观立体图,图11B是对于图11A所示的外观立体图省略上部单元2和下部单元3的结构体,仅表示墨盒40和位置检测传感器18状态的立体图。
将图11B所示的墨盒40和位置检测传感器18以平行于Z轴的投影线投影到作为与记录面30平行的虚拟平面的任意的X-Y平面,图1是表示盒投影区域40A和传感器投影区域18A的说明图。
本实施例的HMP1包括:记录部41,其将图像记录在作为记录材料的记录纸P上;位置检测传感器18;以及作为容纳单元的墨盒40,其具有作为图像形成物质容纳部的墨罐。位置检测传感器18兼有检测装置位置的位置检测装置的功能,以及检测记录纸P的有无的记录材料检测装置的功能。并且,在HMP1中,如图1所示,传感器投影区域18A和盒投影区域40A至少部分地重叠。
作为诸如HMP1的便携式图像形成装置,在以往的喷墨打印机中,用于向不能印刷的书或笔记本进行打印,已知手动扫描型打印机。
在JP-2001-315385-A中描述的便携式图像形成装置中,构成为将墨罐和头部设为一体的头盒部安装在主体部。在该便携式图像形成装置中,在线头没有面对打印对象物的情况下,不执行打印。因此,提供一种检测在面对线头的打印区域中具有打印对象物的的打印对象物检测传感器。并且,仅当该打印对象检测传感器检测到打印对象物时,才驱动线头。
在JP-2001-315385-A中描述的便携式图像形成装置中,旋转检测传感器和打印对象物检测传感器配置为与头盒部的墨排出部同一平面状。并且,为了回避头盒部的安装空间,构成为以与纸面正交的投影线投影的旋转检测传感器和打印对象物检测传感器的投影区域位于头盒部的投影区域的外侧。在该配置中,关于与纸面平行的方向,便携式图像形成装置的整体尺寸增大,便携式图像形成装置的占用面积(安装空间)增大。
另一方面,在本实施例的HMP1中,传感器投影区域18A和盒投影区域40A至少部分地彼此重叠。由此,关于平行于X-Y平面的方向,能使HMP1的尺寸减小,可以使HMP1的占用面积(安装空间)减小。
如图1所示,在墨盒40中,与设有记录部41的下侧相比,上侧宽(X轴方向的尺寸大),投影该宽度宽部分者成为盒投影区域40A。并且,记录部41配置为位于盒投影区域40A的内侧。
另外,如图1所示,关于作为X-Y平面中的一方向的X轴方向(宽度方向),传感器投影区域18A位于X轴方向的盒投影区域40A的内侧。即,X轴方向中的位置检测传感器18位置的范围成为X轴方向中的墨盒40位置的范围的内侧。由此,关于HMP1的宽度方向,能实现在墨盒40的宽度方向外侧不存在位置检测传感器18突出的部分的结构。因此,如上所述,可以将HMP1在扫描方向(X轴方向)的尺寸(装置宽度)设为比墨盒40的宽度稍宽的程度。通过使得装置宽度尽可能小,在记录纸P的表面上,能扩大使得HMP1在扫描方向能移动操作的范围,因此,可以尽可能扩大记录纸P的表面上的记录可能范围。
另外,如图1和图4所示,从横方向(平行于X轴的方向)看墨盒40时,墨盒40成为长方形的一部分被切掉的L字形。并且,位置检测传感器18配置在该切口部分的空间中,在该空间中,上表面31侧和背面34侧的两方向被墨盒40围绕。即,由于墨盒40的特征形状(L形),将位置检测传感器18配置在作为装置主体的壳体的壳体80的下内壁和墨盒40的下外壁之间的死空间中。由此,能实现与墨盒40相比,在上侧或下侧不存在位置检测传感器18突出的部分的结构,能够实现容纳墨盒40的HMP1的上下方向小型化。
另外,作为墨盒40,使用侧面形状为矩形那样的长方体的情况下,在将位置检测传感器18配置在长方体的下方的情况下,在长方体下表面设置的记录部41从记录纸P的表面离开,打印性能劣化。与此相反,当墨盒40的侧面形状设为L形时,能在确保将位置检测传感器18配置在墨盒40下方的空间的同时,使记录部41靠近记录纸P的表面,从而可以改善打印性能。
另外,如上所述,在本实施例的HMP1中,位置检测传感器18兼有检测装置位置的位置检测装置的功能以及检测记录纸P有无的记录材料检测装置的功能。由此,可以用一个传感器同时执行HMP1的装置主体的位置检测,以及作为打印对象物的记录纸P的有无的检测。因此,部件数量减少,实现HMP1的小型化。
作为位置检测传感器18,使用包括发光单元和光接收单元的反射型光学传感器。作为光学传感器,可以使用红色LED型、蓝色LED型、激光型、红外(IR)LED型等。作为反射型传感器,可以采用发出诸如超声波之类的声波或无线电波并接收其反射波以检测装置位置或记录材料的有无的构造,但不限于光学传感器。然而,当采用通常使用的反射型光学传感器时,可以实现装置尺寸减小和成本降低。
图12是当从左侧观察HMP1时的示意性截面图,表示确定墨盒40相对HMP1主体的Y轴方向和Z轴方向的位置的配置。图13是墨盒40的下端附近的放大立体图,图14是图3的A-A截面中的HMP1的下端附近的截面图。如图12和图13所示,在墨盒40的背面侧的外壁面上,配置盒端子40b。
当墨盒40安装在下部单元3,FPC端子13和盒端子40b接触时,FPC端子13和盒端子40b电连接。由此,从电源(电池)15向墨盒40提供驱动力,控制基板14与墨盒40连接。因此,用于控制墨盒40的电信号传送至墨盒40。
如图12所示,柔性扁平电缆25配置在上部单元旋转轴3a的背面34侧,因此,连接上部单元2内的控制基板14和下部单元3内的FPC端子13。柔性扁平电缆25可以根据上部单元2的打开或闭合操作而变形,即使重复上部单元2的打开和闭合操作,控制基板14和FPC端子13之间的连接状态也能维持。
另外,如图12所示,在FPC端子13的背面34侧,配置由硅橡胶等形成的变形量较小的弹性部件28。当安装墨盒40时,由于该弹性部件28,能容许受盒端子40b推压的FPC端子13朝背面34侧移动,同时,安装墨盒40后能固定FPC端子13的位置。
如图13所示,在设置记录部41的墨盒40的下端,设有作为“垂直方向定位部”的上下方向定位部65,该上下方向定位部65与壳体80抵接,决定墨盒40相对于下部单元3的上下方向位置。上下方向定位部65设置在宽度方向的两个位置处,两个上下方向定位部65在宽度方向配置为夹着记录部41。
墨盒40受作为“垂直方向赋能装置”的上下弹簧62以及作为“水平方向赋能装置”的前后弹簧64加压。如图12中的箭头“F3”所示,由上下弹簧62施加向下的力,如图12中的箭头“F1”所示,由前后弹簧64施加朝背面34侧的方向的力。上下弹簧62系止于上部单元2,前后弹簧64系止于下部单元3的壳体80。
如图12所示,上下弹簧62通过加压板63将墨盒40向下方加压,如图14所示,墨盒40的上下方向定位部65与壳体80的开口边缘内壁面85抵接。由此,确定墨盒40相对于HMP1的装置主体的上下方向(Z轴方向)位置。另外,如图13所示,墨盒40的上下方向定位部65设置在记录部41的排出口41a的附近。因此,可以相对于排出口41a高精度地设置上下方向定位部65,能使得具有记录部41的墨盒40相对于作为打印对象物的记录纸P的表面高精度地定位。由图12中的上下弹簧62以及加压板63构成图9和图10所示的盒推压部件21。
通常,排出口41a优选位于距打印对象物大约“1.5×0.2[mm]”的距离。这是由于以下理由:具体地说,因排出口41a与打印对象物之间的距离不同,对墨滴的形状或位置、雾产生影响等,可能在期望的位置不能使得期望的适当量的墨滴着墨。即,当排出口41a与打印对象物之间的距离过近或过远时,担心无法将期望量的墨水排出到期望位置。
另一方面,在光学型位置检测传感器18中,需要将位置检测传感器18的透镜与打印对象物之间的距离设置为至少“2.2[mm]”。这是由于以下原因:当透镜和打印对象物在该距离或更短距离内彼此接近时,难以接收反射光,因此,难以检测准确的位置。因此,即使为了减小HMP1的占地面积(占用面积),配置为传感器投影区域18A的至少一部分位于盒投影区域40A内的场合,也使排出口41a接近于打印对象物。与此相反,在本实施方式的HMP1中,在从侧面观察墨盒40时未切取的部分设置排出口41a,在切出部设置有位置检测传感器18。
因此,可以在将排出口41a与打印对象物之间的距离设定为适当距离的同时,将打印对象物与位置检测传感器18之间的距离维持在能够合适地检测的距离。由于排出口41a和打印对象物之间的距离设定为合适的距离,因此,可以将期望量的墨水排出到期望位置。另外,由于将打印对象物与位置检测传感器18之间的距离保持为能够实现合适检测的距离,因此,提高位置检测传感器18的位置检测精度。由于合适的墨排出和高精度的位置检测,可以改善由手动移动以形成图像的HMP1打印的图像的图像质量。
当由前后弹簧64加压的墨盒40的盒端子40b抵接装置主体侧的FPC端子13时,确定墨盒40相对于装置主体在前后方向(Y轴方向)的定位。即,盒端子40b还具有作为确定前后方向的位置的“平行方向定位部”的功能。如图13所示,排出口41a和盒端子40b配置在互相接近的位置。因此,可以高精度地保持排出口41a和盒端子40b之间的相对位置关系,可以进行墨盒40相对于装置主体的在前后方向(Y轴方向)的定位。
另外,提供为前后方向定位部的高精度设置的部分兼作为盒端子40b和FPC端子13之间的连接部,因此,可以合适地管理盒端子40b和FPC端子13之间的接触压力。因此,由于合适地管理压接型端子部的接触压力,因此,端子部的接触压力的精度得以提高,可以合适地连接HMP1的装置主体的电气部和墨盒40的电气部。
变形例1
图15是在执行电连接的端子部以外的部位进行前后方向定位的变形例1的从左侧观察HMP1的示意性截面图。如图15所示,变形例1的HMP1在墨盒40的背面34侧的外表面,设有起着作为“平行方向定位部”功能的盒侧凸部42,在壳体80的背面34侧的壁的内壁面,设有壳体侧凸部82。变形例1的HMP1在设有盒侧凸部42和壳体侧凸部82这一点上与图12所示实施例的HMP1不同。
在变形例1的HMP1中,由前后弹簧64加压的墨盒40的盒侧凸部42与装置主体侧的壳体侧凸部82抵接,确定墨盒40相对于装置主体在前后方向的位置。即,盒侧凸部42是配置在容纳单元中的单元端子部附近的“平行方向定位部”。在变形例1的HMP1中,盒侧凸部42设置在盒端子40b的附近,壳体侧凸部82设置在FPC端子13的附近。这样,作为压接型端子部的盒端子40b位于墨盒40的前后方向(副扫描方向,Y轴方向)的定位部附近,因此,能够合适地管理盒端子40b相对于FPC端子13的接触压力。由于合适地管理压接型端子部的接触压力,因此,在端子部的接触压力的精度提高,能使得HMP1的装置主体的电气部与墨盒40的电气部合适地连接。
图16是表示作用在如图12所示的实施例的HMP1的墨盒40的力的示意性截面图,是从与记录面30正交的作为装置侧面的左侧面32侧(左侧)观察时的示意性截面图。图16中的“F1”表示由前后弹簧64施加的力,“F2”表示作为对抗“F1”的反作用力、由FPC端子施加的力。图16中的“F3”表示由上下弹簧62施加的力,“F4”表示墨盒40的自重,“F5”表示作为对抗“F3”及“F4”的反作用力、从开口边缘内壁面85朝上下方向定位部65施加的力。在图12和图16中由“α”表示的范围表示前后方向(Y轴方向)中的上下方向定位部65的位置范围。
图16中的“F1”~“F5”满足以下式(1)和(2):
F1+F2=0 (1)
F3+F4+F5=0 (2)
此时,图16中的“F1”施加的部位,即,由系止在上部单元2的上下弹簧62赋能的加压板63与墨盒40的上表面接触的部位位于上下方向定位部65的上方。即,如图16所示,关于前后方向(Y轴方向)的、加压板63相对墨盒40的接触部位的位置范围与上下方向定位部65的位置范围(用“α”表示的范围)至少部分地互相重叠。当以这种方式设置加压板63与上下方向定位部65之间的位置关系时,容易取得作用在墨盒40的力之间的平衡(用上述式(1)和(2)表示的关系)和作用在墨盒40的力矩的平衡。
即使作用在墨盒40的力满足用上述式(1)和(2)表示的关系,达到平衡,若加压板63的接触部位与上下方向定位部65在前后方向偏离,则相对墨盒40作用旋转力矩。在这种情况下,需要将对墨盒40的前后方向定位起作用的、使得图16中的“F1”和“F2”作用的部位配置为抵消因上下方向的力而产生的旋转力矩,难以实现力矩的平衡。与此相反,在本实施例的HMP1中,如图12和图16所示,关于前后方向(Y轴方向),加压板63的接触部位和上下方向定位部65的位置范围(用“α”表示的范围)至少一部分重叠。由此,由于上下方向的力,难以产生作用在墨盒40的旋转力矩,易于实现力矩的平衡。
在HMP1中,如图16所示,关于前后方向(Y轴方向),加压板63的接触部位的位置范围的中央部(图16中的“63a”)构成为与上下方向定位部65的位置范围(图16中用“α”所示的范围)重叠。由此,由于上下方向的力,难以产生作用在墨盒40的旋转力矩,易于实现力矩的平衡。
在本实施例的HMP1中,如图16所示,关于前后方向(Y轴方向),加压板63的接触部位与上下方向定位部65配置为至少一部分互相重叠。由此,介有加压板63的上下弹簧62的加压力(图16中的“F3”加压力)增大,能实现作用在墨盒40的力和力矩的平衡。
作为加压板63与墨盒40的上表面接触的接触部的形状,优选从Z轴方向观察时的平面形状不是正方形或圆形,而是如长方形或椭圆那样、具有长边和比长边短的短边的形状。另外,优选接触部的长度方向与墨盒40的长度方向一致。图17A至图17C是加压板63的三个示例的俯视图。图17A是表示平面形状为长方形的加压板63的视图,图17B是表示平面形状为椭圆的加压板63的视图。图17C是表示平面形状为长圆的加压板63的视图。
配置使得平面形状具有长边和短边的加压板63的相对墨盒40的接触部的长度方向与墨盒40的长度方向一致,能够抑制旋转力矩作用在墨盒40。由此,能够使墨盒40相对于HMP1的主体的位置进一步稳定。
变形例2
图18是从左侧看变形例2的HMP1的示意性截面图,其中,将上下弹簧62设为具有相同弹簧系数的两个弹簧(第一上下弹簧62a以及第二上下弹簧62b)。图18所示的变形例2的HMP1与图12所示的实施方式的HMP1的不同之处在于,设有二个上下弹簧62。图19是表示在变型例2的HMP1中由上下弹簧62赋能的加压板63倾斜状态的图。
如变形例2那样,配置多个上下弹簧62,当加压板63相对装置主体倾斜时,欲使加压板63成为与装置主体的记录面平行的回复力起作用。由此,可以保持使加压板63相对记录面30平行的状态,可以稳定地保持墨盒40。
回复力作用在加压板63的过程如下(1~4项):
1.由于用户的操作或诸如施加到HMP1的冲击之类的外力,墨盒40相对于HMP1的装置主体(壳体80)倾斜。
2.追随墨盒40的倾斜,加压板63倾斜。
3.根据加压板63的倾斜,两个上下弹簧62(62a和62b)引起的加压力(图19中的“F3a”和“F3b”)变化。
4.在图19所示状态下,与第一上下弹簧62a相比,第二上下弹簧62b进一步压缩,因此,第二上下弹簧62b侧的加压力大。因此,成为“F3a<F3b”的关系,对加压板63作用朝图19中顺时针方向旋转的力矩(回复力)。
如变形例2的HMP1那样,垂直方向赋能装置具有作为多个赋能部件的第一上下弹簧62a和第二上下弹簧62b。由此,即使墨盒40相对于装置主体倾斜,加压板63倾斜,回复力也作用在加压板63,使得倾斜解消方向的回复力也作用于受加压板63加压的墨盒40。由于这样的回复力,可以提高墨盒40相对于HMP1的装置主体的安装位置的稳定性。
图20至图22是表示作为打开或关闭下部单元3的上表面的盖部件的上部单元2以上部单元旋转轴3a为中心旋转进行开闭动作的视图。图20是在上部单元2关闭的状态下的HMP1的示意性截面图,图21是在上部单元2开放中途的HMP1的示意性截面图,图22是在上部单元2为打开状态下的HMP1的示意性截面图。
在本实施方式的HMP1如图12和图16所示,作为使得“F3”的力起作用的垂直方向赋能装置的上下弹簧62以及加压板63配置在作为旋转部件的上部单元2中的上部单元旋转轴3a的附近。由此,可以减小上部单元2的开闭动作所需的力,可以改善开闭操作上部单元2的使用者的可操作性。
即使上下弹簧62的加压力相同,若上下弹簧62和加压板63离开上部单元旋转轴3a,则因上下弹簧62的赋能力使得上部单元2开放地旋转的旋转力矩增大。若该旋转力矩增大,则将处于打开状态的上部单元2设为关闭状态的操作所需的力增加。另外,即使在关闭状态下,为了保持成为大的旋转力矩作用状态的上部单元2的闭合状态,也需要增大上部单元锁定爪11固定上部单元2的力。并且,解除固定力大的上部单元锁定爪11的固定的操作也需要大的力,因此,即使将关闭状态的上部单元2设为打开状态的操作,所需要的力也变大。
另一方面,在本实施例的HMP1中,将上下弹簧62和加压板63设置在上部单元旋转轴3a的附近,因此,可以减小上部单元2的开闭动作所需要的力,可以提高打开或关闭上部单元2的用户的可操作性。
接下来,将描述墨盒40相对于本实施例的HMP1的装置主体在宽度方向(手动扫描方向,X轴方向)的定位。图23是图12的E-E截面的HMP1的示意性截面图。图24是从斜下方观察墨盒40时的外观立体图。如图24所示,在墨盒40的右侧面,三个部位设有盒侧宽度方向抵接部71a。
如图23所示,在下部单元3的壳体80的左侧面32侧的壁的内壁面设有宽度方向加压弹簧70,在壳体80的右侧面33侧的壁的内壁面设有壳体侧宽度方向抵接部71。当由宽度方向加压弹簧70将墨盒40朝宽度方向的右侧面33侧加压时,墨盒40的盒侧宽度方向抵接部71a与壳体侧宽度方向抵接部71压接而定位。
如图23所示,两个宽度方向加压弹簧70配置成在上下方向排列,但是,可以将一个宽度方向加压弹簧70配置在面对墨盒40在上下方向的中央附近的位置。另外,也可以使得多个宽度方向加压弹簧70排列配置在墨盒40的前后方向(图23中与纸面正交的方向)。图23中由“β”表示的范围表示由宽度方向的上下方向定位部65所夹的范围。在宽度方向,将上下弹簧62配置在用“β”表示的范围内,可以防止因上下弹簧62的赋能力而作用的旋转力矩,因此,可以防止墨盒40倾斜。
如图12所示,将从HMP1的背面34侧的端部到记录部41的前后方向的中心位置的距离设为“X1”,将从记录部41的中心位置到位置检测传感器18的检测位置的距离设为“X2”。并且,若将从HMP1的背面34侧的端部到位置检测传感器18的检测位置的距离设为“X0”,则成为“X0=X1+X2”的关系。
距离“X0”通过将位置检测传感器18安装在HMP1的壳体80而固定,但是距离“X1”因HMP1的各装置的部件及组装误差或安装墨盒40时的误差多少发生变化。然而,若一旦将墨盒40安装在装置主体,则墨盒40由前后弹簧64加压而定位,因此,可以防止安装后距离“X1”变化。距离“X0”固定,可以防止安装后距离“X1”变动,因此,也可以防止距离“X2”在安装后变动。由此,可以防止在形成图像时记录部41的墨排出位置与位置检测传感器18的检测位置之间的距离变动,可以执行稳定的图像形成。
另外,在本实施例的HMP1中,关于墨盒40相对于装置主体的定位,通过上下弹簧62在上下方向(Z轴方向)进行定位,通过宽度方向加压弹簧70进行宽度方向(Y轴方向)的定位。这样,将安装后的墨盒40相对于装置主体在三个轴的任意方向上定位。因此,在形成图像时,防止记录部41的墨水排出位置与位置检测传感器18的检测位置之间的相对位置发生变动,从而可以进行稳定的图像形成。
在上述实施例中,在宽度方向(X轴方向),传感器投影区域18A位于盒投影区域40A的内侧,但是,关于前后方向(Y轴方向),传感器投影区域18A的一部分位于盒投影区域40A的外侧。作为位置检测传感器18与墨盒40之间的位置关系,即使关于前后方向(Y轴方向),也优选传感器投影区域18A位于盒投影区域40A的内侧。
图25是表示传感器投影区域18A的整体配置成位于盒投影区域40A内侧的构造的视图。在如图25所示的配置中,关于与X-Y平面平行的方向,可以使HMP1的大小进一步减小,可以进一步减小HMP1的占用面积。
在上述实施方式中,作为一个传感器的位置检测传感器18具有检测装置位置的位置检测装置的功能和检测记录纸P的有无的记录材料检测装置的功能。但是,本发明也适用于个别设置位置检测装置和记录材料检测装置的结构,或者仅设置位置检测装置和记录材料检测装置中的任何一个的结构。
在上述实施例中,说明了将本发明适用于喷墨型HMP1的示例,但是,本发明的配置也可以适用于其他图像形成方法实现的装置。例如,本发明适用于诸如感热式或热转印式的适当类型的记录装置。
上述配置仅是说明性的,对于下面描述的各方面均获得特定效果。
方面(Aspect)1
根据本发明的一个方面,提供一种便携式图像形成装置,例如HMP1,包括:诸如记录部41的记录部,配置为将图像记录在诸如记录纸P的记录材料上;配置为检测便携式图像形成装置的位置的位置检测装置和配置为检测记录材料的有无的记录材料检测装置中的至少一个(位置检测传感器18等);以及诸如墨盒40的容纳单元,包括诸如墨罐的图像形成材料容纳部。所述位置检测装置和所述记录材料检测装置中的至少一个相对平行于与所述记录材料对向的诸如记录面30之类的记录面的虚拟平面的投影区域,与所述容纳单元相对所述虚拟平面的投影区域至少部分地重叠。由此,可以减小便携式图像形成装置在沿着记录面的方向的尺寸,可以减小便携式图像形成装置的安装空间。
方面2
在根据方面1的便携式图像形成装置中,与记录面平行方向的至少一方向(X轴方向,宽度方向等)的位置检测装置或记录材料检测装置的位置范围为一方向的容纳单元的位置范围的内侧。由此,可以将便携式图像形成装置在一方向的大小设为比容纳单元在一方向的大小稍大程度。
方面3
在根据方面1或方面2的便携式图像形成装置中,位置检测装置和记录材料检测装置中的至少一方相对于虚拟平面的投影区域位于容纳单元相对于虚拟平面的投影区域的内侧。由此,如上述图25所示的构造,可以进一步减小便携式图像形成装置在沿着记录面的方向的大小,可以进一步减小便携式图像形成装置的安装空间。
方面4
在根据方面1至方面3中任一项的便携式图像形成装置中,容纳单元包括记录部。由此,作为将记录部和图像形成物质容纳部设为一体的容纳单元,能够实现相对装置主体装卸的构造。
方面5
在根据方面4的便携式图像形成装置中,在容纳单元中的记录部的附近,设有盒端子40b或盒侧凸部42等的平行方向定位部,其确定关于与记录面平行方向(前后方向,Y轴方向等)的容纳单元相对壳体80等的装置主体的位置。由此,可以提高记录部相对于装置主体的位置的精度。
方面6
在根据方面1至方面5中任一项的便携式图像形成装置中,容纳单元包括形成L形的平行部和垂直部。平行部在平行于记录面的方向(前后方向,Y轴方向)延伸,垂直部在垂直于记录面的方向(上下方向,Z轴方向)延伸。由此,可以实现使用容纳单元的构造,该容纳单元包括相对于平行部朝垂直于记录面的方向突出的竖直部。
方面7
在根据方面6的便携式图像形成装置中,位置检测装置和记录材料检测装置中的至少一方的至少一部分配置在由L形的容纳单元的上表面31侧和背面34侧等的两方向围住的空间中。由此,可以将位置检测装置和记录材料检测装置中的至少一方的至少一部分配置在诸如壳体80的装置主体的壳体与容纳单元之间形成的死空间,因此,可以实现装置尺寸的减小。
方面8
在根据方面6或方面7的便携式图像形成装置中,垂直部与平行部相比,朝着记录面侧(向下侧)突出,在垂直部的记录面侧的端部(下端),具有上下方向定位部65等的垂直方向定位部,以及记录部,所述垂直方向定位部确定关于与记录面垂直方向(上下方向)的容纳单元相对于装置主体的位置。由此,可以将记录部相对记录材料的距离设定为合适的距离,可以改善图像质量。另外,由于记录部设置在L形的突出部分,因此,可以实现装置整体尺寸的减小。
方面9
在根据方面1至方面8中任一项的便携式图像形成装置中,容纳单元包括与装置主体电连接的诸如盒端子40b的单元端子部,在容纳单元的单元端子部的附近,具有诸如盒侧凸部42的平行方向定位部,所述平行方向定位部确定关于与记录面平行方向(前后方向,Y轴方向)的容纳单元相对于装置主体的位置。由此,提高单元端子部的接触压力的精度,可以合适地连接容纳单元的电气部和装置主体的电气部。
方面10
在根据方面1至方面8中任一项的便携式图像形成装置中,容纳单元包括与装置主体电连接的诸如盒端子40b的单元端子部,确定关于与记录面平行方向(前后方向,Y轴方向)的容纳单元相对于装置主体的位置的平行方向定位部是诸如盒端子40b的单元端子部。由此,高精度地设置使得成为平行方向定位部的部分兼作为单元端子部与诸如FPC端子13的主体侧端子部之间的连接部,能合适地管理单元端子部与主体端子部之间的接触压力。由此,提高单元端子部的接触压力的精度,可以合适地连接容纳单元的电气部和装置主体的电气部。
方面11
在根据方面1至方面10中的任一项所述的便携式图像形成装置中,进一步包括诸如前后弹簧64的水平方向赋能装置,该水平方向赋能装置对设有诸如盒端子40b或盒侧凸部42之类的平行方向定位部的面的相反侧的面朝平行方向定位部侧赋能,所述平行方向定位部确定关于与容纳单元的表面中的记录面平行的方向(前后方向,Y轴方向)的容纳单元相对于装置主体的位置。由此,可以进行关于与记录面平行的方向的容纳单元相对于装置主体的定位。另外,特别地,在根据方面8或方面9的方面中,提高单元端子部的接触压力的精度,可以合适地连接容纳单元的电气部和装置主体的电气部。
方面12
在根据方面1至方面11中的任一项所述的便携式图像形成装置中,进一步包括诸如上下弹簧62的垂直方向赋能装置,该垂直方向赋能装置对设有诸如上下方向定位部65之类的垂直方向定位部的面(下表面)的相反侧的面(上表面等)朝垂直方向定位部侧赋能,所述垂直方向定位部确定关于与容纳单元的表面中的记录面垂直方向的容纳单元相对于装置主体的位置。由此,可以在与记录面垂直的方向上进行容纳单元相对于装置主体的定位。
方面13
在根据方面12的便携式图像形成装置中,从与记录面正交的装置侧面(左侧等)观察时,关于与记录面平行的方向,垂直方向赋能装置与容纳单元接触的垂直赋能接触部(诸如加压板63的下表面)的位置范围与垂直方向定位部的位置范围的至少一部分重叠。由此,可以容易地获得作用在容纳单元的力的平衡和作用在容纳单元的力矩的平衡。
方面14
在根据方面13的便携式图像形成装置中,从与记录面正交的装置侧面侧观察时,关于与记录面平行的方向,垂直赋能接触部的位置范围的中央部(图16中的“63a”等)与垂直方向定位部的位置范围重叠。由此,可以更容易地获得作用在容纳单元的力的平衡和作用在容纳单元的力矩的平衡。
方面15
在根据方面13或方面14的便携式图像形成装置中,垂直赋能接触部为这样的形状:从与记录面正交的方向看,平面形状具有长边和比长边短的短边。由此,可以进一步稳定容纳单元相对于装置主体的位置。
方面16
在根据方面12至方面15中任一项的便携式图像形成装置中,垂直方向赋能装置包括多个赋能部件,例如第一上下弹簧62a和第二上下弹簧62b。由此,当容纳单元相对于装置主体倾斜时,可以使得回复力起作用,可以提高容纳单元相对于装置主体的安装位置的稳定性。
方面17
在根据方面12至方面16中任一项所述的便携式图像形成装置中,进一步包括旋转部件,例如上部单元2,其保持在装置主体,以诸如上部单元旋转轴3a的旋转轴为中心自由旋转,垂直方向赋能装置配置在旋转部件的旋转轴附近。由此,能够提高使得旋转部件旋转的操作时的操作性。
方面18
在根据方面1至方面17中的任一项所述的便携式图像形成装置中,进一步包括兼有位置检测装置的功能和记录材料检测装置的功能的记录材料检测器。由此,可以减少部件的数量,可以实现便携式图像形成装置的尺寸的减小。
方面19
在根据方面18的便携式图像形成装置中,记录材料检测器是反射型传感器。由此,由于使用通常使用的反射型传感器,因此,能够实现装置的小型化和低成本化。
方面20
在根据方面18或方面19的便携式图像形成装置中,记录材料检测器是光学型传感器。由此,由于使用通常使用的光学型传感器,因此,能够实现装置的小型化和低成本化。
方面21
根据本发明的另一方面,提供一种便携式图像形成装置主体,例如HMP1的装置主体,包括配置为检测装置主体位置的位置检测装置和配置为检测记录材料的有无的记录材料检测装置中的至少一个(位置检测传感器18等)。诸如墨盒40之类的容纳单元包括诸如记录图像的记录部41之类的记录部,以及诸如墨罐之类的图像形成材料容纳部,所述容纳单元相对图像形成装置主体装卸。所述位置检测装置主体和所述记录材料检测装置中的至少一个相对平行于与诸如记录纸P之类的记录材料对向的诸如记录面30之类的记录面的虚拟平面的投影区域,与安装状态的容纳单元相对所述虚拟平面的投影区域的至少一部分重叠。由此,如上述方面1中一样,可以减小便携式图像形成装置在沿着记录面的方向的尺寸,可以减小便携式图像形成装置的安装空间。
本专利申请基于并要求于2018年9月28日在日本专利局提交的日本专利申请No.2018-185169的优先权,其全部公开内容通过引用作为参考。
附图标记列表
1 HMP
2 上部单元
2b 垂直延伸部
2a 水平延伸部
3 下部单元
3a 上部单元旋转轴
5a 打印键
5b 电源键
7 副扫描引导件
9 连接端口
10 主扫描引导件
11 上部单元锁定爪
12 盒装卸机构
12a 装卸操作部
13 FPC端子
14 控制基板
15 电池
18 位置检测传感器
18A 传感器投影区域
19 温度传感器
21 盒推压部件
25 柔性扁平电缆
28 弹性部件
30 记录面
30a 排出开口部
31 上表面
32 左侧面
33 右侧面
34 背面
35 正面
37a 第一左辊
37b 第二左辊
37c 左旋转轴
38a 第一右辊
38b 第二右辊
38c 右旋转轴
39 握持部
40 墨盒
40A 盒投影区域
40b 盒端子
41 记录部
41a 排出口
42 盒侧凸部
52 Bt基板
56 记录控制器
58 陀螺仪传感器
59 LED灯
62 上下弹簧
62a 第一上下弹簧
62b 第二上下弹簧
63 加压板
64 前后弹簧
65 上下方向定位部
70 宽度方向加压弹簧
71 壳体侧宽度方向抵接部
71a 盒侧宽度方向抵接部
80 壳体
82 壳体侧凸部
85 开口边缘内壁面
302 检测开口
H 手
P 记录纸
W1 打印部
W2 打印预定部
- 便携式图像形成装置和便携式图像形成装置主体
- 图像形成系统、便携式通信终端、图像形成装置