一种液压转向系统闭环控制系统及控制方法
文献发布时间:2023-06-19 10:49:34
技术领域
本发明涉及一种自动驾驶车辆与无人自动搬运车的转向控制,尤其是涉及一种液压转向系统闭环控制系统及控制方法。
背景技术
自动驾驶与AGV(无人自动搬运车)领域对车辆转向系统要求精度很高,通常在1度以内,而有人驾驶车辆的液压转向机构精度通常不高,在不同的工况下方向盘打到同样的角度,车轮转角通常误差很大而且转向响应速度慢,最大能达到5度左右。对于这种车辆,传统的自动驾驶改造策略为加装转角绝对值编码器,并且用ECU直接控制转向液压阀,但控制精度低、响应慢,无法满足使用要求。
发明内容
本发明提供了一种液压转向系统闭环控制系统及控制方法,解决液压转向系统自动化改造后转向精度低、响应慢的问题,其技术方案如下所述:
一种液压转向系统闭环控制系统,所述液压转向系统包括方向盘、液压转向机构和车轮,方向盘通过转向节与液压转向机构相连接,所述液压转向机构通过车轮的转向轮轴与车轮相连接,所述液压转向系统闭环控制系统包括控制装置、ECU、编码器、转向伺服电机,所述ECU分别与控制装置、编码器、转向伺服电机相连接,所述编码器安装在原车车轮的转向轮轴上,所述转向伺服电机安装在原车方向盘的转轴。
所述控制装置采用自动驾驶车辆的自动驾驶控制系统,或采用接受自动驾驶控制系统控制的数据处理芯片。
所述ECU采用单片机,通过CAN总线与转向伺服电机和编码器连接。
所述编码器采用转角编码器,安装时标定转向编码器的零点。
所述编码器采用博斯特绝对值编码器。
所述ECU采用飞思卡尔S12系列单片机。
一种液压转向系统闭环控制方法,包括以下步骤:
S1:ECU获取转角编码器提供的反馈转角数据;
S2:ECU计算车轮当前转角的数据;
S3:所述控制装置发送第一期望车轮转角指令给ECU,ECU收到第一期望转角数据;
S4:ECU计算第一期望转角数据与车轮当前的转角数据的转角差值;
S5:ECU把转角差值代入内置的PID控制器,获得期望的车轮转速数据和期望的车轮转角数据;
S6:ECU计算转向伺服电机期望转速数据和转向伺服电机期望转角数据;
S7:ECU将转向伺服电机期望转速数据和期望转角数据下发给转向伺服电机;
S8:转向伺服电机执行动作,进而通过车辆的液压转向系统带动车轮进行动作;
S9:车轮的转向轮轴安装的转角编码器将数据返回给ECU,返回步骤S1。
进一步的,步骤S2中,所述车轮转角的数据为编码器的反馈转角数据*a,所述a表示编码器数据与车轮角度的对应关系。
进一步的,步骤S6中,所述转向伺服电机期望转速数据为期望的车轮转速数据*b,所述转向伺服电机期望转角数据为期望的车轮转角数据*b,b表示转向电机角度变化与车轮角度变化关系,根据(方向盘转角最大值-方向盘转角最小值)/(车轮转角最大值-车轮转角最小值)获得。
所述液压转向系统闭环控制系统及控制方法使得液压转向系统的车轮转向角度精准,响应速度快,绕过了直接控制液压阀的方式,采用转向电机进行精度的转角控制,通过进行实时闭环控制,使得车轮达到理想的转向角度。
附图说明
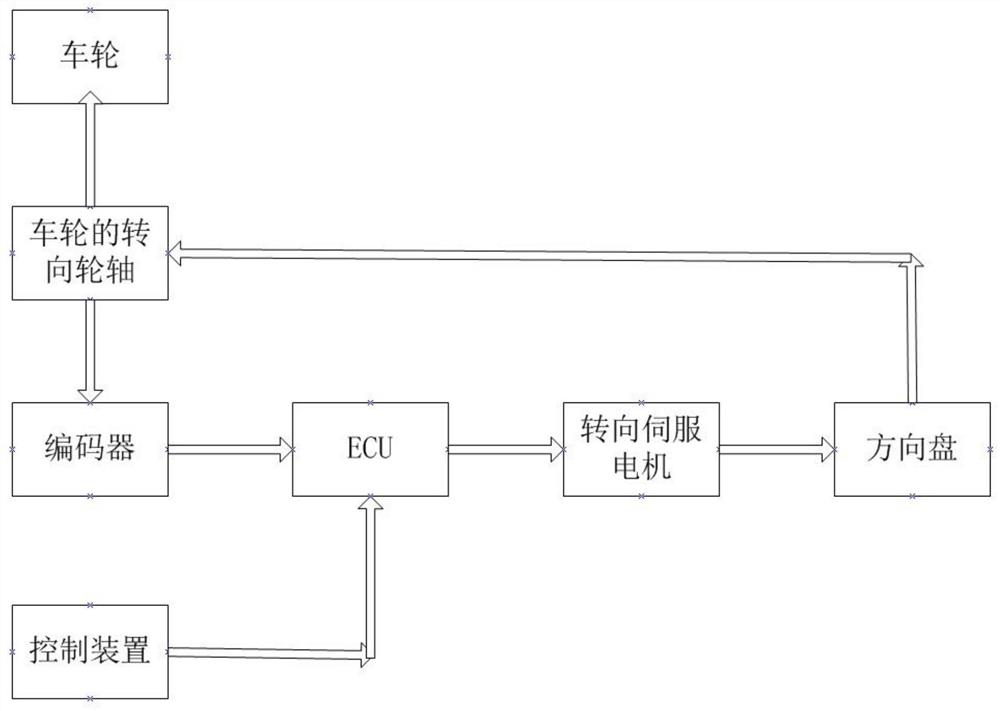
图1是所述液压转向系统闭环控制系统的电路示意图;
图2是所述液压转向系统闭环控制系统的安装结构示意图;
图3是所述液压转向系统闭环控制方法的流程示意图。
具体实施方式
如图1所示,所述液压转向系统闭环控制系统包括控制装置、ECU、编码器、转向伺服电机,所述ECU分别与控制装置、编码器、转向伺服电机相连接。
所述控制装置可以采用自动驾驶车辆的自动驾驶控制系统,也可以单独采用自动驾驶控制系统控制的数据处理芯片实现,其主要功能是接收自动驾驶控制系统的转角数据指令,并向ECU发出转角数据指令。
所述ECU采用单片机,通过CAN总线与转向伺服电机和转角编码器连接,通过采集编码器的数据向转向伺服电机发出转动调整的信号。
所述编码器采用转角编码器,安装在原车车轮的转向轮轴上,用于实时测量车轮转角。
所述转向伺服电机安装在原车方向盘的转轴上,通过转动带动原车方向盘顺时针或者逆时针旋转。
如图2所示,本系统可以在不更改原车的液压转向系统的基础上,通过增加编码器4、转向伺服电机2、ECU进行加装。具体来说,原车的液压转向系统包括方向盘1、液压转向机构、车轮3,所述方向盘1通过转向节10与液压转向机构相连接,所述液压转向机构包括换向阀6、液压泵7、储液罐8、转向缸9,该机构为现有技术,不再赘述。所述液压转向机构的转向缸9通过车轮的转向轮轴5与车轮3相连接。
所述编码器4采用博斯特绝对值编码器,安装在车轮的转向轮轴5处,用于实时采集转向车轮的当前角度;所述转向伺服电机2安装在原车方向盘1的转轴上,负责带动原车液压转向机构旋转使得车轮旋转;所述ECU可以采用飞思卡尔S12系列单片机,通过信号线连接编码器4、转向伺服电机2,负责对转向进行实时闭环控制,使得转向车轮达到理想的转向角度。
安装后,需要标定转向编码器4的零点,计算编码器数据与车轮3的角度关系;以及标定转向伺服电机2的转速与车轮3的角速度关系,且上述关系呈线性关系,对应数据保存在ECU。这样在使用时,控制装置发送期望的车轮转角数据指令,ECU根据指令,首先采集转角编码器反馈的当前车轮角度,然后向转向伺服电机发出转动信号,进而带动方向盘旋转,所述方向盘旋转通过液压转向机构带动车轮转向,所述转角编码器进而反馈给ECU当前车轮角度,实现闭环控制车轮转角,直至调整到位。
如图3所示,所述液压转向系统闭环控制系统对应的控制方法,在加装硬件时包括以下步骤:
S1:在原车方向盘轴上加装转向伺服电机;
S2:在原车车轮处的转向轮轴上安装转角编码器,用于测量车轮转角;
S3:加装ECU,通过CAN总线与转向电机和转角编码器连接。
所述控制方法需要对初始数据进行处理,包括以下步骤:
S1:标定转向编码器零点,计算编码器数据与车轮角度关系,此关系一般为线性关系,如果是非线性关系需要通过多次采样进行曲线拟合获得较为准确的对应关系,记为a;
S2:标定转向电机角度变化与车轮角度变化关系,此关系为粗略的大概关系,可根据(方向盘转角最大值-方向盘转角最小值)/(车轮转角最大值-车轮转角最小值)获得,记为b。对应液压转向系统来说,实际是获取不到精确的关系的,因为即使车轮转角到达左右机械限位时,方向盘仍然能够缓慢的转动。
在硬件和数据测试无误后,所述液压转向系统闭环控制方法包括以下操作步骤:
S1:ECU获取转角编码器提供的反馈转角数据;
S2:ECU计算车轮当前转角的数据,所述车轮转角的数据为编码器的反馈转角数据*a;
S3:所述控制装置发送第一期望车轮转角指令给ECU,ECU收到第一期望转角数据;
S4:ECU计算第一期望转角数据与车轮当前的转角数据的转角差值;
S5:ECU把转角差值代入内置的PID控制器,获得期望的车轮转速数据和期望的车轮转角数据;
S6:ECU计算转向伺服电机期望转速数据和转向伺服电机期望转角数据,所述转向伺服电机期望转速数据为期望的车轮转速数据*b,所述转向伺服电机期望转角数据为期望的车轮转角数据*b;
S7:ECU将转向伺服电机期望转速数据和期望转角数据下发给转向伺服电机;
S8:转向伺服电机执行动作,进而通过车辆的液压转向系统带动车轮进行动作;
S9:车轮的转向轮轴安装的转角编码器将数据返回给ECU,返回步骤S1。
可见,通过循环执行,在调整过程中本方法进行了闭环操作,能够有效的精准的完成车轮转角控制,所有的调整动作最终实现步骤S3中,控制装置要求的期望车轮转角。
应用控制方法时,控制装置发送不同的期望转角进行测试,如果效果不理想可以调整PID控制器参数进行优化,如此反复直到控制精度足够高、响应足够快。PID控制器为自动控制领域常规控制器原理不再赘述,该控制器具有很好的鲁棒性能够解决步骤5所述的液压转向系统所具有的非线性问题。
所述液压转向系统闭环控制系统及控制方法,能够根据自动驾驶控制系统的转角指令,实现精准的车轮转角,使液压转向系统的车轮转向角度精准,响应速度快,绕过了直接控制液压阀的方式,采用转向电机进行精度的转角控制,通过进行实时闭环控制,使得车轮达到理想的转向角度。
- 一种液压转向系统闭环控制系统及控制方法
- 一种堆取料机俯仰液压系统、闭环控制系统及控制方法