一种长方形鱼缸喂食设备
文献发布时间:2023-06-19 10:52:42
技术领域
本发明涉及一种喂食设备,尤其涉及一种长方形鱼缸喂食设备。
背景技术
在城市家居生活中,很多人都有在家里养金鱼或热带鱼的习惯,可以美化家居环境,但由于生活节奏的加快,工作压力的不断增大,出差在外的时间越来越多,导致很多人不能按时回家照料喂养的鱼,目前,市面上出现的自动宠物喂食器,能够在较长的一段时间之内定时对宠物提供食物,避免人工喂食的麻烦或是宠物暂时无人照看喂食的问题,但是,现有的自动宠物喂食器通常较难保持定量的供给,且人们对鱼缸表面水的杂质进行清理时,比较费时费力。
因此,鉴于上述问题提供一种能够保持饲料定量供给,且省时省力的长方形鱼缸喂食设备。
发明内容
为了克服较难保持定量的供给,比较费时费力的缺点,要解决的技术问题:提供一种能够保持饲料定量供给,且省时省力的长方形鱼缸喂食设备。
技术方案是:一种长方形鱼缸喂食设备,包括有:
安装架和移动机构,安装架上部设有移动机构;
放料机构,移动机构上设有放料机构;
放料机构包括有:
支撑架,移动机构的某个部件顶部两侧之间均设有支撑架;
装料框,支撑架之间设有装料框;
挡板,装料框下部滑动式设有挡板;
第一齿条,安装架顶部两侧对称设有第一齿条;
第一转轴,支撑架上部均转动式设有第一转轴;
第一齿轮,第一转轴上均设有第一齿轮,第一齿轮与第一齿条配合;
转盘,第一转轴上均设有转盘;
转杆,转盘上均转动式设有转杆,转杆均与挡板转动式连接;
扭簧,支撑架与第一转轴之间均设有扭簧,扭簧套在第一转轴上。
进一步地,移动机构包括有:
导杆,安装架上部设有对称设有导杆;
连接板,导杆两侧之间均设有连接板;
第一支撑板,导杆之间滑动式设有第一支撑板;
第二支撑板,导杆之间滑动式设有第二支撑板。
进一步地,还包括有净化机构,净化机构包括有:
第三支撑板,第一支撑板设有第三支撑板,第三支撑板与导杆滑动式连接;
装料筒,第三支撑板上部设有装料筒;
夹板,装料筒两侧均滑动式设有夹板;
第一弹簧,夹板与装料筒之间均对称设有第一弹簧;
活动架,装料筒下部滑动式设有活动架,活动架上部与夹板配合;
第二弹簧,活动架中部与装料筒下部之间对称设有第二弹簧;
固定块,安装架中部对称设有固定块;
阻框,固定块上部均滑动式设有阻框,阻框与活动架配合;
第三弹簧,阻框与固定块之间均设有第三弹簧。
进一步地,还包括有清理机构,清理机构包括有:
第四支撑板,导杆之间滑动式设有两个第四支撑板,一侧的第四支撑板与第三支撑板连接;
第五支撑板,第四支撑板顶部两侧之间对称设有第五支撑板;
第二转轴,第五支撑板上部均转动式设有第二转轴;
第二齿轮,第二转轴上均设有第二齿轮,第二齿轮与第一齿条配合;
滚轮,第五支撑板下部之间转动式设有滚轮;
第一皮带,滚轮与第二转轴之间均绕有第一皮带;
收集箱,第五支撑板上之间设有收集箱。
进一步地,还包括有防潮机构,防潮机构包括有:
第三转轴,装料框下部转动式设有第三转轴;
第二皮带,第一转轴与第三转轴之间均设有第二皮带;
搅拌轴,第三转轴中部设有搅拌轴,搅拌轴位于装料框内部。
进一步地,还包括有:
动力机构,导杆上设有动力机构。
进一步地,动力机构包括有:
第六支撑板,导杆上滑动式设有第六支撑板,第六支撑板与第二支撑板连接;
伺服电机,第六支撑板顶部设有伺服电机;
第二齿条,安装架上设有第二齿条;
第三齿轮,伺服电机输出轴上设有第三齿轮。
进一步地,装料筒的形状为长方形。
有益效果是:本发明通过设有清理机构,滚轮将水表面的杂质带入至收集箱内,方便人们对水表面的杂质进行清理;通过设有防潮机构,搅拌轴对饲料进行搅拌,放置饲料受潮黏在一起;通过设有动力机构,无需人们手动移动第二支撑板。
附图说明
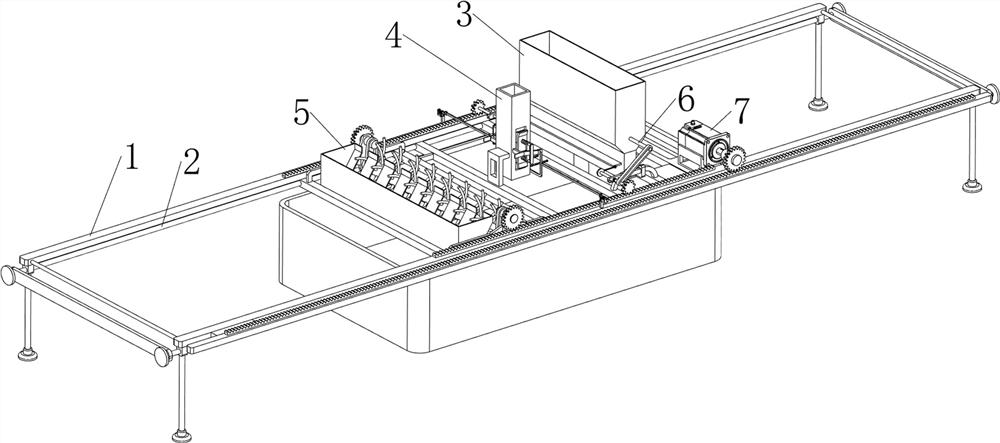
图1为本发明的立体结构示意图。
图2为本发明的移动机构立体结构示意图。
图3为本发明的放料机构立体结构示意图。
图4为本发明的净化机构第一部分立体结构示意图。
图5为本发明的净化机构第二部分立体结构示意图。
图6为本发明的清理机构部分立体结构示意图。
图7为本发明的防潮机构部分立体结构示意图。
图8为本发明的动力机构部分立体结构示意图。
附图标号:1_安装架,2_移动机构,20_导杆,21_连接板,22_第一支撑板,23_第二支撑板,3_放料机构,30_支撑架,31_装料框,32_挡板,33_第一齿条,34_第一转轴,35_第一齿轮,36_转盘,37_转杆,38_扭簧,4_净化机构,40_第三支撑板,41_装料筒,42_夹板,43_第一弹簧,44_活动架,45_第二弹簧,46_固定块,47_阻框,48_第三弹簧,5_清理机构,50_第四支撑板,51_第五支撑板,52_第二转轴,53_第二齿轮,54_第一皮带,55_滚轮,56_收集箱,6_防潮机构,60_第三转轴,61_第二皮带,62_搅拌轴,7_动力机构,70_第六支撑板,71_伺服电机,72_第二齿条,73_第三齿轮。
具体实施方式
下面结合附图所示的实施例对本发明作进一步描述。
实施例1
一种长方形鱼缸喂食设备,如图1、图2和图3所示,包括有安装架1、移动机构2和放料机构3,安装架1上部设有移动机构2,移动机构2上设有放料机构3,放料机构3包括有支撑架30、装料框31、挡板32、第一齿条33、第一转轴34、第一齿轮35、转盘36、转杆37和扭簧38,移动机构2的某个部件顶部前后两侧之间均设有支撑架30,支撑架30之间设有装料框31,装料框31下部滑动式设有挡板32,安装架1中部前后两侧对称设有第一齿条33,支撑架30上部左侧均转动式设有第一转轴34,第一转轴34上均设有第一齿轮35,第一齿轮35与第一齿条33配合,第一转轴34上均设有转盘36,转盘36上均转动式设有转杆37,转杆37均与挡板32转动式连接,支撑架30与第一转轴34之间均设有扭簧38,扭簧38套在第一转轴34上。
当人们需要对鱼进行喂食时,可以使用本设备,将饲料放入装料框31内,当人们向左移动移动机构2的某个部件时,带动支撑架30向左移动,支撑架30带动第一转轴34向左移动,当第一齿轮35与第一齿条33啮合时,进而使得第一齿条33带动第一齿轮35转动,扭簧38变形,第一齿轮35再带动第一转轴34转动,第一转轴34带动转盘36转动,转盘36带动转杆37向左移动,转杆37带动挡板32向左移动,使得挡板32上的开口与装料框31底部开口处重合,饲料掉入鱼缸内,当转盘36带动转杆37向右移动,转杆37带动挡板32向右移动,使得挡板32上的开口与装料框31底部开口处分离,挡板32挡住装料框31底部开口处,避免装料框31内的饲料持续掉入鱼缸内,当第一齿轮35与第一齿条33分离时,扭簧38复位,扭簧38带动第一转轴34复位,第一转轴34带动第一齿轮35与转盘36复位,转盘36带动转杆37复位,转杆37带动挡板32将装料框31底部开口处挡住。
移动机构2包括有导杆20、连接板21、第一支撑板22和第二支撑板23,安装架1上部对称设有导杆20,导杆20左右两侧之间均设有连接板21,导杆20左侧之间滑动式设有第一支撑板22,导杆20右侧之间滑动式设有第二支撑板23,第一支撑板22和第二支撑板23均与支撑架30连接。
人们手动向左移动第一支撑板22与第二支撑板23,使得第一支撑板22与第二支撑板23带动支撑架30向左移动。
实施例2
在实施例1的基础之上,如图4、图5、图6、图7和图8所示,还包括有净化机构4,净化机构4包括有第三支撑板40、装料筒41、夹板42、第一弹簧43、活动架44、第二弹簧45、固定块46、阻框47和第三弹簧48,第一支撑板22左侧设有第三支撑板40,第三支撑板40与导杆20滑动式连接,第三支撑板40上部右侧设有装料筒41,装料筒41前后两侧均滑动式设有夹板42,夹板42与装料筒41之间均对称设有第一弹簧43,装料筒41下部滑动式设有活动架44,活动架44上部与夹板42配合,活动架44中部下侧与装料筒41下部右侧之间对称设有第二弹簧45,安装架1中部对称设有固定块46,固定块46上部均滑动式设有阻框47,阻框47与活动架44配合,阻框47与固定块46之间均设有第三弹簧48。
将活性炭包装好放入装料筒41内,当第一支撑板22向左移动时,第一支撑板22带动第三支撑板40向左移动,第三支撑板40带动装料筒41及装料筒41上的部件向左移动,当装料筒41带动活动架44向左移动至与阻框47接触时,第三弹簧48被压缩,装料筒41带动夹板42与第一弹簧43向左移动,而阻框47会抵住活动架44,活动架44与装料筒41分离,第二弹簧45被压缩,进而使得活性炭掉入鱼缸内,同时活动架44与夹板42分离,第一弹簧43复位,第一弹簧43带动夹板42向内侧移动,使得夹板42夹紧活性炭,避免装料筒41内的活性炭持续掉入鱼缸内,当活动架44与阻框47分离时,第三弹簧48与第二弹簧45复位,第二弹簧45带动活动架44向左移动复位,当活动架44向左移动与夹板42接触时,活动架44带动夹板42向外侧移动,第一弹簧43被压缩,包装的活性炭可以防止鱼误食。
还包括有清理机构5,清理机构5包括有第四支撑板50、第五支撑板51、第二转轴52、第二齿轮53、第一皮带54、滚轮55和收集箱56,导杆20左侧之间滑动式设有两个第四支撑板50,右侧的第四支撑板50与第三支撑板40连接,第四支撑板50顶部前后两侧之间对称设有第五支撑板51,第五支撑板51上部均转动式设有第二转轴52,第二转轴52上均设有第二齿轮53,第二齿轮53与第一齿条33配合,第五支撑板51下部之间转动式设有滚轮55,滚轮55与第二转轴52之间均绕有第一皮带54,第五支撑板51左侧之间设有收集箱56。
当第三支撑板40向右移动时,第三支撑板40带动第四支撑板50移动,第四支撑板50带动第五支撑板51移动,第五支撑板51带动第二转轴52移动,第二转轴52带动第二齿轮53移动,当第二齿轮53与第一齿条33啮合时,第二齿轮53转动带动第二转轴52转动,第二转轴52带动第一皮带54转动,第一皮带54带动滚轮55转动,使得滚轮55将水表面的杂质带入至收集箱56内,当第二齿轮53与第一齿条33分离时,第二齿轮53及第二齿轮53上的部件随之停止转动,人们就可将收集箱56内的杂质进行清理。
还包括有防潮机构6,防潮机构6包括有第三转轴60、第二皮带61和搅拌轴62,装料框31下部转动式设有第三转轴60,第一转轴34与第三转轴60之间均设有第二皮带61,第三转轴60中部设有搅拌轴62,搅拌轴62位于装料框31内部。
当第一转轴34转动时,第一转轴34带动第二皮带61转动,第二皮带61带动第三转轴60转动,第三转轴60带动搅拌轴62转动,使得搅拌轴62对饲料进行搅拌,放置饲料受潮黏在一起。
还包括有动力机构7,导杆上设有动力机构7。
人们启动动力机构7,使得动力机构7带动导杆20上所有的部件移动。
动力机构7包括有第六支撑板70、伺服电机71、第二齿条72和第三齿轮73,导杆20上滑动式设有第六支撑板70,第六支撑板70与第二支撑板23连接,第六支撑板70顶部前侧设有伺服电机71,安装架1顶部前侧设有第二齿条72,伺服电机71输出轴上设有第三齿轮73,第三齿轮73与第二齿条72啮合。
人们启动伺服电机71,伺服电机71输出轴带动第三齿轮73转动,第三齿轮73在第二齿条72上转动,进而使得第三齿轮73带动伺服电机71和第六支撑板70移动,如此就无需人们手动移动第二支撑板23,当人们不再需要对鱼进行喂食时,关闭伺服电机71即可。
上述实施例是提供给熟悉本领域内的人员来实现或使用本发明的,熟悉本领域的人员可在不脱离本发明的发明思想的情况下,对上述实施例做出种种修改或变化,因而本发明的保护范围并不被上述实施例所限,而应该是符合权利要求书提到的创新性特征的最大范围。
- 一种长方形鱼缸喂食设备
- 一种鱼缸补气喂食设备