车辆调度系统、服务器装置以及存储介质
文献发布时间:2023-06-19 10:55:46
技术领域
本公开涉及车辆调度系统、服务器装置以及存储介质。
背景技术
在专利文献1中,记载有通过本人认证和使用许可认证这2阶段认证来进行自动驾驶车辆的基于无人驾驶的车辆调度服务的系统。
现有技术文献
专利文献
专利文献1:日本特开2016-115364号公报
发明内容
期待能够提供进一步提高用户的便利性的自动驾驶车辆的基于无人驾驶的车辆调度服务的系统。
本公开是鉴于上述完成的,其目的在于提供一种能够提供进一步提高用户的便利性的自动驾驶车辆的基于无人驾驶的车辆调度服务的车辆调度系统、服务器装置、以及车辆调度程序。
本公开所涉及的车辆调度系统具备:自动驾驶车辆;便携终端装置,发送至少包括与自动驾驶车辆的车辆调度场所有关的信息的车辆调度请求信号;以及服务器装置,响应于接收到车辆调度请求信号,将所述自动驾驶车辆调度到所述车辆调度场所,所述服务器装置响应于所述自动驾驶车辆到达离所述车辆调度场所的预定距离范围内,通知所述便携终端装置,在基于响应于所述通知从所述便携终端装置发送的认证信息认证了所述便携终端装置的用户的情况下,许可所述自动驾驶车辆的利用。
本公开所涉及的服务器装置具备具有硬件的处理器,所述处理器响应于接收到从便携终端装置发送的至少包括与自动驾驶车辆的车辆调度场所有关的信息的车辆调度请求信号,将所述自动驾驶车辆调度到所述车辆调度场所,响应于所述自动驾驶车辆到达离所述车辆调度场所的预定距离范围内,向所述便携终端装置通知所述自动驾驶车辆到达,在基于响应于所述通知从所述便携终端装置发送的认证信息认证了所述便携终端装置的用户的情况下,许可所述自动驾驶车辆的利用。
本公开所涉及的车辆调度程序使具有硬件的处理器执行:响应于接收到从便携终端装置发送的至少包括与自动驾驶车辆的车辆调度场所有关的信息的车辆调度请求信号,将所述自动驾驶车辆调度到所述车辆调度场所,响应于所述自动驾驶车辆到达离所述车辆调度场所的预定距离范围内,向所述便携终端装置通知所述自动驾驶车辆到达,在基于响应于所述通知从所述便携终端装置发送的认证信息认证了所述便携终端装置的用户的情况下,许可所述自动驾驶车辆的利用。
根据本公开,能够提供进一步提高用户的便利性的自动驾驶车辆的基于无人驾驶的车辆调度服务。
附图说明
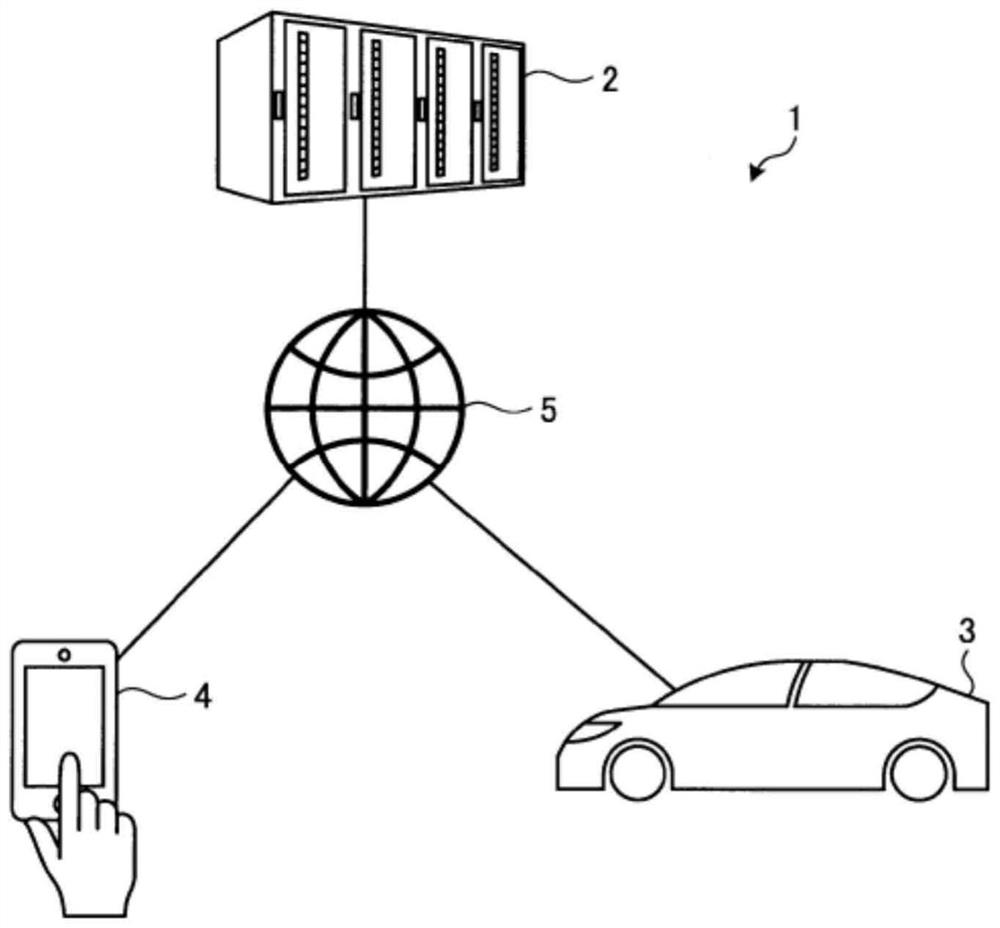
图1是示出作为本公开的一个实施方式的车辆调度系统的结构的示意图。
图2是示出图1所示的服务器装置的结构的框图。
图3是示出图1所示的自动驾驶车辆的结构的框图。
图4是示出图1所示的便携终端装置的结构的框图。
图5是示出作为本公开的一个实施方式的车辆调度处理的流程的时序图。
图6是示出图1所示的车辆调度处理的变形例的流程的时序图。
(符号说明)
1:车辆调度系统;2:服务器装置;3:自动驾驶车辆;4:便携终端装置;5:电气通信线路;21:通信控制部;22:控制部;23:车辆调度数据库;24:认证信息数据库;31:通信控制部;32:位置信息获取部;33:车辆控制部;34:地图信息数据库;41:操作输入部;42:通信控制部;43:控制部。
具体实施方式
以下,参照附图,说明作为本公开的一个实施方式的车辆调度系统。
〔结构〕
首先,参照图1~图4,说明作为本公开的一个实施方式的车辆调度系统的结构。图1是示出作为本公开的一个实施方式的车辆调度系统的结构的示意图。图2是示出图1所示的服务器装置2的结构的框图。图3是示出图1所示的自动驾驶车辆3的结构的框图。图4是示出图1所示的便携终端装置4的结构的框图。
如图1所示,作为本公开的一个实施方式的车辆调度系统1是提供自动驾驶车辆的基于无人驾驶的车辆调度服务的系统,具备服务器装置2、自动驾驶车辆3以及便携终端装置4。而且,服务器装置2、自动驾驶车辆3以及便携终端装置4构成为能够经由因特网线路网、便携电话线路网等电气通信线路5相互进行信息通信。
如图2所示,服务器装置2由能够利用云计算技术、边缘计算技术执行各种信息处理的信息处理装置构成,具备通信控制部21、控制部22、车辆调度数据库23以及认证信息数据库24。
通信控制部21是控制经由电气通信线路5的与自动驾驶车辆3以及便携终端装置4之间的信息通信的装置。具体而言,通信控制部21经由电气通信线路5接收从自动驾驶车辆3以及便携终端装置4发送的各种信息,并且经由电气通信线路5向自动驾驶车辆3以及便携终端装置4发送各种信息。作为通信控制部21,能够采用DCM(Data Communication Module,数据通信模块)用的通信单元、利用移动体无线通信网进行信息通信的通信单元。
控制部22具备具有CPU(Central Processing Unit,中央处理单元)、DSP(DigitalSignal Processor,数字信号处理器)、FPGA(Field-Programmable Gate Array,现场可编程门阵列)等硬件的处理器以及RAM(Random Access Memory,随机存取存储器)、ROM(ReadOnly Memory,只读存储器)等存储部。控制部22通过将保存于存储部的车辆调度程序等计算机程序载入到存储部的作业区域并执行计算机程序,控制服务器装置2的各部。
存储部也可以是固定于计算机等的记录介质、可从计算机等拆下的记录介质。作为固定于计算机等的记录介质,可以例示EPROM(Erasable Programmable ROM,可擦可编程ROM)、硬盘驱动器(HDD、Hard Disk Drive)。作为可从计算机等拆下的记录介质,可以例示USB(Universal Serial Bus,通用串行总线)存储器、软盘、光磁盘、CD-ROM(Compact Disc-Read Only Memory,压缩盘只读存储器)、CD-RW(Compact Disc-Rewritable,可重复读写压缩盘)、DVD(Digital Versatile Disc,数字多功能盘)、BD(Blu-ray(注册商标)Disc)、DAT(Digital Audio Tape,数字录音带)、8mm带、存储卡等。SSD(Solid State Drive,固态硬盘)既能够用作可从计算机等拆下的记录介质,也能够用作固定于计算机等的记录介质。
车辆调度数据库23保存有希望自动驾驶车辆3的车辆调度的用户的识别信息、自动驾驶车辆3的车辆调度日期时间以及车辆调度场所、自动驾驶车辆3的目的地、自动驾驶车辆3的识别信息等车辆调度计划信息。
认证信息数据库24保存有希望自动驾驶车辆3的车辆调度的用户固有的认证信息。作为认证信息,可以例示在车辆调度时生成的用户固有的识别信息、在调度给用户的自动驾驶车辆3处提示的固有的识别信息、调度给用户的自动驾驶车辆3可报告的声音、用户的生物体认证信息(指纹、脸、声音等)、赋予给用户拥有的便携终端装置4的固有的识别信息等。
自动驾驶车辆3是EV(Electric Vehicle,电动汽车)、HV(Hybrid Vehicle,混合动力汽车)、FCEV(Fuel Cell Electric Vehicle,燃料电池电动汽车)等公知的车辆,构成为能够进行无人自动驾驶(无人驾驶)。在此,无人驾驶是指,不依赖于自动驾驶车辆3的驾驶员的驾驶操作而执行自动驾驶车辆3的加速、减速、停止以及转向等驾驶操作的控制。
如图3所示,自动驾驶车辆3具备通信控制部31、位置信息获取部32、车辆控制部33以及地图信息数据库34。
通信控制部31是控制经由电气通信线路5的与服务器装置2之间的信息通信的装置。具体而言,通信控制部31经由电气通信线路5接收从服务器装置2发送的各种信息,并且经由电气通信线路5向服务器装置2发送各种信息。作为通信控制部31,能够采用DCM用的通信单元、利用移动体无线通信网来进行信息通信的通信单元。
位置信息获取部32是通过接收来自GPS(Global Positioning System,全球定位系统)卫星的电波来检测自动驾驶车辆3的位置信息的装置。作为检测自动驾驶车辆3的位置信息的方法,还能够采用组合LiDAR(Light Detection and Ranging(光检测和测距)、Laser Imaging Detection and Ranging(激光成像检测与测距))和三维数字地图的方法。
车辆控制部33具备具有CPU、DSP、FPGA等硬件的处理器以及RAM、ROM等存储部。车辆控制部33通过将保存于存储部的计算机程序载入到存储部的作业区域并执行计算机程序,控制自动驾驶车辆3的各部。存储部也可以是固定于计算机等的记录介质、可从计算机等拆下的记录介质。
地图信息数据库34保存有地图信息。在此,地图信息是指,道路、道路构造物、设施等的位置的确定所需的信息,包括例如与设定于道路上的各节点有关的数据(例如节点ID、坐标等)、与设定于道路上的各链路有关的数据(例如链路ID、链路名、连接节点ID、道路坐标、道路类别(收费道路、一般道路等)、行车道数等)、以及地物数据(例如信号灯、道路标识、护栏、设施等)等。
如图4所示,便携终端装置4由智能手机等能够进行信息通信的信息处理装置构成,具备操作输入部41、通信控制部42以及控制部43。
操作输入部41由键盘、触摸面板、开关、麦克风等输入装置构成,输出表示用户的操作输入信息的电信号。
通信控制部42是控制经由电气通信线路5的与服务器装置2之间的信息通信的装置。具体而言,通信控制部42经由电气通信线路5接收从服务器装置2发送的各种信息,并且经由电气通信线路5向服务器装置2发送各种信息。作为通信控制部42,能够采用DCM用的通信单元、利用移动体无线通信网来进行信息通信的通信单元。
控制部43具备具有CPU、DSP、FPGA等硬件的处理器以及RAM、ROM等存储部。控制部43通过将保存于存储部的计算机程序载入到存储部的作业区域并执行计算机程序,控制便携终端装置4的各部。存储部也可以是固定到计算机等的记录介质、可从计算机等拆下的记录介质。
具有这样的结构的车辆调度系统1通过执行以下所示的车辆调度处理,用户的便利性良好地提供自动驾驶车辆3的基于无人驾驶的车辆调度服务。以下,参照图5以及图6,说明执行车辆调度处理时的车辆调度系统1的动作。
〔车辆调度处理〕
图5是示出作为本公开的一个实施方式的车辆调度处理的流程的时序图。图5所示的车辆调度处理是在通过便携终端装置4的用户操作操作输入部41来经由电气通信线路5连接服务器装置2和便携终端装置4的定时开始,车辆调度处理进入到步骤S1的处理。
在步骤S1的处理中,便携终端装置4的用户通过操作操作输入部41,输入用户的识别信息、与希望自动驾驶车辆3的车辆调度的日期时间以及场所、以及目的地有关的信息,之后,输入车辆调度请求的发送指示。在被输入车辆调度请求的发送指示时,控制部43通过控制通信控制部42,经由电气通信线路5将包括用户输入的信息的车辆调度请求信号发送给服务器装置2。由此,步骤S1的处理完成,车辆调度处理进入到步骤S2的处理。
在步骤S2的处理中,服务器装置2的控制部22根据包含于车辆调度请求信号的信息,制作自动驾驶车辆3的车辆调度计划,将车辆调度计划信息保存到车辆调度数据库23。由此,步骤S2的处理完成,车辆调度处理进入到步骤S3的处理。
在步骤S3的处理中,服务器装置2的控制部22通过控制通信控制部21,经由电气通信线路5将表示用户的认证方法的信息发送给便携终端装置4。具体而言,在用户认证中使用的认证信息是用户固有的识别信息的情况下,控制部22发送在用户认证时请输入以下的识别信息这样的消息数据。另外,在用户认证中使用的认证信息是自动驾驶车辆3的车室内记载的识别信息的情况下,控制部22发送在用户认证时请输入车室内记载的识别信息这样的消息数据。另外,在用户认证中使用的认证信息是用户的生物体认证信息的情况下,控制部22发送在用户认证时请输入用户的生物体认证信息这样的消息数据。另外,在用户认证中使用的认证信息是赋予给便携终端装置4的固有的识别信息的情况下,控制部22发送在用户认证时请输入赋予给便携终端装置4的固有的识别信息这样的消息数据。由此,步骤S3的处理完成,车辆调度处理进入到步骤S4的处理。
在步骤S4的处理中,便携终端装置4的用户通过操作操作输入部41,输入在步骤S3的处理中服务器装置2发送的信息的确认信号的发送指示。在被输入确认信号的发送指示时,控制部43通过控制通信控制部42,经由电气通信线路5将确认信号发送给服务器装置2。由此,步骤S4的处理完成,车辆调度处理进入到步骤S5的处理。
在步骤S5的处理中,服务器装置2的控制部22根据保存于车辆调度数据库23的车辆调度计划信息,向以在用户希望的日期时间移动到车辆调度场所的方式被指定车辆调度的自动驾驶车辆3发送车辆控制信号。由此,步骤S5的处理完成,车辆调度处理进入到步骤S6的处理。
在步骤S6的处理中,自动驾驶车辆3的车辆控制部33依照从服务器装置2发送的车辆控制信号,使用位置信息获取部32以及地图信息数据库34,通过无人驾驶移动到用户希望的车辆调度场所。由此,步骤S6的处理完成,车辆调度处理进入到步骤S7的处理。
在步骤S7的处理中,自动驾驶车辆3的车辆控制部33通过控制通信控制部31,经由电气通信线路5将位置信息获取部32获取的自动驾驶车辆3的位置信息发送给服务器装置2。由此,步骤S7的处理完成,车辆调度处理进入到步骤S8的处理。
在步骤S8的处理中,服务器装置2的控制部22根据在步骤S7的处理中从自动驾驶车辆3发送的位置信息,判别自动驾驶车辆3是否到达了离车辆调度场所的预定距离范围内。然后,控制部22响应于自动驾驶车辆3到达离车辆调度场所的预定距离范围内,将自动驾驶车辆3到达了车辆调度场所的意思的通知发送给用户的便携终端装置4。此外,也可以在自动驾驶车辆3侧判别自动驾驶车辆3是否到达了离车辆调度场所的预定距离范围内,在自动驾驶车辆3到达了离车辆调度场所的预定距离范围内的定时,自动驾驶车辆3通知服务器装置2、便携终端装置4。由此,步骤S8的处理完成,车辆调度处理进入到步骤S9的处理。
在步骤S9的处理中,便携终端装置4的用户通过操作操作输入部41来输入在步骤S3的处理中指示的认证信息之后,输入认证信息的发送指示。在被输入认证信息的发送指示时,控制部43通过控制通信控制部42,经由电气通信线路5将认证信息发送给服务器装置2。由此,步骤S9的处理完成,车辆调度处理进入到步骤S10的处理。
在步骤S10的处理中,服务器装置2的控制部22通过判别在步骤S9的处理中发送的认证信息是否与保存于认证信息数据库24的认证信息一致来认证用户。然后,在用户认证后,控制部22使车辆调度处理进入到步骤S11的处理。另一方面,在用户未得到认证的情况下,控制部22在向便携终端装置4发送错误消息等之后,结束车辆调度处理。
在步骤S11的处理中,服务器装置2的控制部22根据保存于车辆调度数据库23的车辆调度计划信息,以移动到用户希望的目的地的方式向自动驾驶车辆3发送车辆控制信号。由此,步骤S11的处理完成,车辆调度处理进入到步骤S12的处理。
在步骤S12的处理中,自动驾驶车辆3的车辆控制部33依照从服务器装置2发送的车辆控制信号,使用位置信息获取部32以及地图信息数据库34,通过无人驾驶移动到用户希望的目的地。由此,步骤S12的处理完成,一连串的车辆调度处理结束。
如从以上的说明可知,在作为本公开的一个实施方式的车辆调度系统中,服务器装置2响应于自动驾驶车辆3到达离车辆调度场所的预定距离范围内而通知便携终端装置4,在基于响应于通知从便携终端装置4发送的认证信息认证了便携终端装置4的用户的情况下,许可自动驾驶车辆3的利用。由此,即使在车辆调度场所存在很多人、车的情况下,用户也能够容易地判断为了自身而调度的自动驾驶车辆是哪个车辆。另外,能够抑制有恶意的用户利用被调度的自动驾驶车辆3。其结果,能够提供进一步提高用户的便利性的自动驾驶车辆的基于无人驾驶的车辆调度服务。
〔变形例〕
图6是示出图1所示的车辆调度处理的变形例的流程的时序图。图6所示的车辆调度处理是在通过便携终端装置4的用户操作操作输入部41而经由电气通信线路5连接服务器装置2和便携终端装置4的定时开始,车辆调度处理进入到步骤S21的处理。此外,步骤S21、S22的处理是与上述步骤S1、S2的处理相同的内容,所以以下省略其说明,从步骤S23的处理开始说明。
在步骤S23的处理中,服务器装置2的控制部22通过控制通信控制部21,经由电气通信线路5将表示用户的认证方法的信息发送给便携终端装置4。具体而言,控制部22发送请发送自动驾驶车辆3的报告音这样的消息数据。由此,步骤S23的处理完成,车辆调度处理进入到步骤S24的处理。
在步骤S24的处理中,便携终端装置4的用户通过操作操作输入部41来输入在步骤S23的处理中服务器装置2发送的信息的确认信号的发送指示。在被输入确认信号的发送指示时,控制部43通过控制通信控制部42,经由电气通信线路5将确认信号发送给服务器装置2。由此,步骤S24的处理完成,车辆调度处理进入到步骤S25的处理。
在步骤S25的处理中,服务器装置2的控制部22根据保存于车辆调度数据库23的车辆调度计划信息,以在用户希望的日期时间移动到车辆调度场所的方式向自动驾驶车辆3发送车辆控制信号。由此,步骤S25的处理完成,车辆调度处理进入到步骤S26的处理。
在步骤S26的处理中,自动驾驶车辆3的车辆控制部33依照从服务器装置2发送的车辆控制信号,使用位置信息获取部32以及地图信息数据库34,通过无人驾驶移动到用户希望的车辆调度场所。由此,步骤S26的处理完成,车辆调度处理进入到步骤S27的处理。
在步骤S27的处理中,自动驾驶车辆3的车辆控制部33通过控制通信控制部31,经由电气通信线路5将位置信息获取部32获取的自动驾驶车辆3的位置信息发送给服务器装置2。由此,步骤S27的处理完成,车辆调度处理进入到步骤S28的处理。
在步骤S28的处理中,服务器装置2的控制部22根据在步骤S27的处理中从自动驾驶车辆3发送的位置信息,判别自动驾驶车辆3是否到达离车辆调度场所的预定距离范围内。然后,控制部22响应于自动驾驶车辆3到达离车辆调度场所的预定距离范围内,将指示输出报告音的控制信号发送给自动驾驶车辆3。自动驾驶车辆3的车辆控制部33依照来自服务器装置2的控制信号,输出报告音。由此,步骤S28的处理完成,车辆调度处理进入到步骤S29的处理。
在步骤S29的处理中,服务器装置2的控制部22通过控制通信控制部21,在与便携终端装置4之间建立通话线路。由此,步骤S29的处理完成,车辆调度处理进入到步骤S30的处理。
在步骤S30的处理中,服务器装置2的控制部22通过判别从便携终端装置4发送的自动驾驶车辆3的报告音是否与保存于认证信息数据库24的自动驾驶车辆3的报告音一致来认证用户。然后,在用户认证后,控制部22使车辆调度处理进入到步骤S31的处理。另一方面,在用户未得到认证的情况下,控制部22在向便携终端装置4发送差错消息等之后,结束车辆调度处理。
在步骤S31的处理中,服务器装置2的控制部22根据保存于车辆调度数据库23的车辆调度计划信息,以移动到用户希望的目的地的方式向自动驾驶车辆3发送车辆控制信号。由此,步骤S31的处理完成,车辆调度处理进入到步骤S32的处理。
在步骤S32的处理中,自动驾驶车辆3的车辆控制部33依照从服务器装置2发送的车辆控制信号,使用位置信息获取部32以及地图信息数据库34,通过无人驾驶移动到用户希望的目的地。由此,步骤S32的处理完成,一连串的车辆调度处理结束。
本领域技术人员能够容易地导出进一步的效果、变形例。本公开的更广泛的方式不限定于如以上所述表示并且记述的特定的详细以及代表性的实施方式。因此,能够不脱离通过所附的权利要求及其均等物定义的总括的公开的概念的精神或者范围而进行各种变更。
- 车辆调度系统、服务器装置以及存储介质
- 垃圾运输车辆调度方法、装置、可读存储介质及服务器