一种多反射干涉仪及多反射干涉分光方法
文献发布时间:2023-06-19 10:57:17
技术领域
本发明涉及光谱技术领域,具体涉及一种多反射干涉仪及多反射干涉分光方法。
背景技术
光谱分析是一种灵敏、快速鉴别物质及分析其化学组成和相对含量的方法,是研究物质原子能级以及结构的重要技术手段,在遥感技术、环境科学、农林产业、珠宝鉴定等领域广泛应用。光谱仪器根据其分光原理分为棱镜光谱仪、衍射光栅光谱仪和干涉光谱仪,其中干涉光谱仪应用的干涉型分光原理被称为第三代分光技术,因基于其设计的光谱仪器具有高光通量、高光谱分辨率等优点而逐渐成为当今光谱分析的主要技术手段。
现有技术中的干涉仪测量系统中所使用的干涉仪通常为传统的迈克尔逊干涉仪,其存在以下缺陷:在设置较低的光谱分辨率时,其动镜移动的距离较大,造成光谱移动和扫描的总时间较多,即扫描速度低;此外,迈克尔逊干涉仪的放大倍数低、光谱分辨率低。
发明内容
本发明是为了解决上述问题而进行的,目的在于提供一种多反射干涉仪及多反射干涉分光方法。
本发明提供了一种多反射干涉仪,用于设置在多反射干涉自动测量系统中,具有这样的特征,包括:第一支撑单元;分束器,固定在第一支撑单元上,用于将入射光分成第一光束和第二光束;第一反射单元,固定设置在第一支撑单元上,包括第一长反射镜、第一短反射镜以及第一终端反射镜,第一长反射镜和第一短反射镜互相平行且相对设置,第一终端反射镜与第一短反射镜设置在第一长反射镜的同一侧,第一光束经第一长反射镜和第一短反射镜进行多次反射后,垂直射入第一终端反射镜后原路返回至分束器;以及第二反射单元,设置在第一支撑单元上,包括第二长反射镜、第二短反射镜以及第二终端反射镜,第二长反射镜和第二短反射镜互相平行且相对设置,第二终端反射镜与第二短反射镜设置在第二长反射镜的同一侧,第二光束经第二长反射镜和第二短反射镜进行多次反射后,垂直射入第二终端反射镜后原路返回至分束器,第一光束和第二光束在分束器汇聚后作为出射光输出,其中,第二反射单元还包括移动组件,该移动组件包括滚珠丝杆、滑块、步进电机以及动镜支架,滚珠丝杆安装在第一支撑单元上,与第二短反射镜相垂直,滑块套设在滚珠丝杆上,步进电机的输出轴通过联轴器与滚珠丝杆连接,用于带动滚珠丝杆转动进而带动滑块沿着滚珠丝杆的长度方向移动,动镜支架安装在滑块上,第二长反射镜安装在动镜支架上。
在本发明提供的多反射干涉自动测量系统中,还可以具有这样的特征:其中,第二反射单元还包括与滚珠丝杆相平行设置的光栅尺,光栅尺具有探头,探头通过连接件连接在滑块上,用于随滑块移动从而定位滑块的位置。
在本发明提供的多反射干涉自动测量系统中,还可以具有这样的特征:其中,动镜支架包括竖直设置在滑块上的第二支撑杆,套设在第二支撑杆上的第二固定件以及用于将第二固定件固定在第二支撑杆上的紧固螺栓,第二固定件具有用于安装第二长反射镜的安装卡槽。
在本发明提供的多反射干涉自动测量系统中,还可以具有这样的特征:其中,第一光束为反射光束或透射光束。
在本发明提供的多反射干涉自动测量系统中,还可以具有这样的特征:其中,第一长反射镜、第一短反射镜、第一终端反射镜、第二长反射镜、第二短反射镜以及第二终端反射镜均为平面反射镜。
在本发明提供的多反射干涉自动测量系统中,还可以具有这样的特征:其中,第一长反射镜和第二长反射镜的长度均为105mm,第一短反射镜和第二短反射镜的长度均为68mm,第一长反射镜和第一短反射镜的水平间距为30mm,第二长反射镜和第二短反射镜的水平间距最小为30mm,最大为50mm,第一长反射镜和第二长反射镜上的光束反射次数为2次。
在本发明提供的多反射干涉自动测量系统中,还可以具有这样的特征:第二反射单元和第一反射单元的最大光程差为132.65mm,此时的光程放大倍数为6.63,此时多反射干涉仪的光谱分辨率为0.075cm
在本发明提供的多反射干涉自动测量系统中,还可以具有这样的特征:其中,第一支撑单元具有支撑板和匚形板,支撑板上均匀设置有多个通孔,匚形板倒置在支撑板上,其底部的两端向外侧延伸形成延伸板,延伸板上设置有与通孔相匹配的通槽,通过螺栓穿过通槽和通孔的方式将匚形板固定在支撑板上。
在本发明提供的多反射干涉自动测量系统中,还可以具有这样的特征:其中,匚形板的顶部均匀设置有多个贯穿孔,多反射干涉仪还包括六个第二支撑单元,六个第二支撑单元分别用于固定分束器、第一长反射镜、第一短反射镜、第一终端反射镜、第二短反射镜以及第二终端反射镜,第二支撑单元包括安装件、第一支撑杆以及第一固定件,安装件具有通槽,通过螺栓穿过通槽和贯穿孔的方式将安装件固定在匚形板的顶部,第一支撑杆竖直连接在安装件上,第一固定件套设在第一支撑杆上,并且第一固定件以螺栓固定的方式固定在第二支撑杆上,具有固定卡槽。
本发明还提供一种多反射干涉分光方法,其特征在于,包括以下步骤:步骤一,入射光到达分束器,被分束器分为第一光束和第二光束;步骤二,第一光束进入第一反射单元,并在第一长反射镜和第一短反射镜之间进行多次反射,然后垂直射入第一终端反射镜后返回至分束器;步骤三,第二光束进入第二反射单元,并在第二长反射镜和第二短反射镜之间进行多次反射,然后垂直射入第二终端反射镜后返回至分束器,期间不断移动第二长反射镜使得第二长反射镜和第二短反射镜之间间距逐渐变大;步骤四,返回分束器的第一光束和第二光束,在分束器汇聚后作为出射光输出。
发明的作用与效果
根据本发明所涉及的多反射干涉仪,因为具有分束器,第一反射单元和第二反射单元,第一反射单元具有第一长反射镜、第一短反射镜以及第一终端反射镜,第二反射单元具有第二长反射镜、第二短反射镜、第二终端反射镜以及移动组件,通过移动组件可以移动第二长反射镜,使得第二长反射镜和第二短反射镜间距逐渐变大,入射光经分束器分光后分为第一光束和第二光束,第一光束经第一长反射镜和第一短反射镜进行多次反射后,垂直射入第一终端反射镜后原路返回至分束器,第二光束经第二长反射镜和第二短反射镜进行多次反射后,垂直射入第二终端反射镜后原路返回至分束器,第一光束和第二光束在分束器汇聚后作为出射光输出,所以,该多反射干涉仪与传统迈克尔逊干涉仪相比,在同样的光谱分辨率下,因为拥有高的放大倍数,使得动镜的移动距离变短,进而缩短了干涉场测量时间,其测量时间约为迈克尔逊干涉仪的三分之一;此外,光程差放大倍数可以根据实际需要通过改变第二长反射镜和第二短反射镜之间的间距和光源的入射角度来实现,在工艺与采样率允许的前提下,放大倍数可以调整到实际需要的值,进而得到较高的光谱分辨率。
另外,上述多反射干涉仪降低了对时间调制型干涉仪中的振动影响与控制难度。在放大倍数较低的干涉仪中,如果希望得到较高的光谱分辨率,那么就需要较长的动镜移动距离,因此对动镜移动结构的工艺和控制有很高的要求。而应用了本方案的干涉仪,在获得相同的光谱分辨率时,可以将放大倍数调整到较高的数值来减小动镜移动距离,这样就大大减小了动镜移动过程中结构振动与环境抖动对测量带来的影响。
此外,本发明的多反射干仪拥有紧凑型设计,便于小型化。因为在获得同样的光谱分辨的情况下,第二长反射镜移动距离变短,进而可以设计较短的动镜移动轨道,且整个干涉场自动测量系统可以依照某个比例进行缩放而不影响性能。
根据本发明的多反射干涉分光方法,因为包括以下步骤:首先将入射光分为两束,一束进入第一反射单元,并在第一长反射镜和第一短反射镜之间进行多次反射,然后垂直射入第一终端反射镜后返回至;另一束进入第二反射单元,并在第二长反射镜和第二短反射镜之间进行多次反射,然后垂直射入第二终端反射镜后返回,期间不断移动所述第二长反射镜使得所述第二长反射镜和所述第二短反射镜之间间距逐渐变大;最后两束汇聚后输出,所以能够缩短测量时间,且放大倍数可以调整到实际需要的值,进而得到较高的光谱分辨率。
附图说明
图1是本发明的实施例中多反射干涉自动测量系统的工作流程示意图;
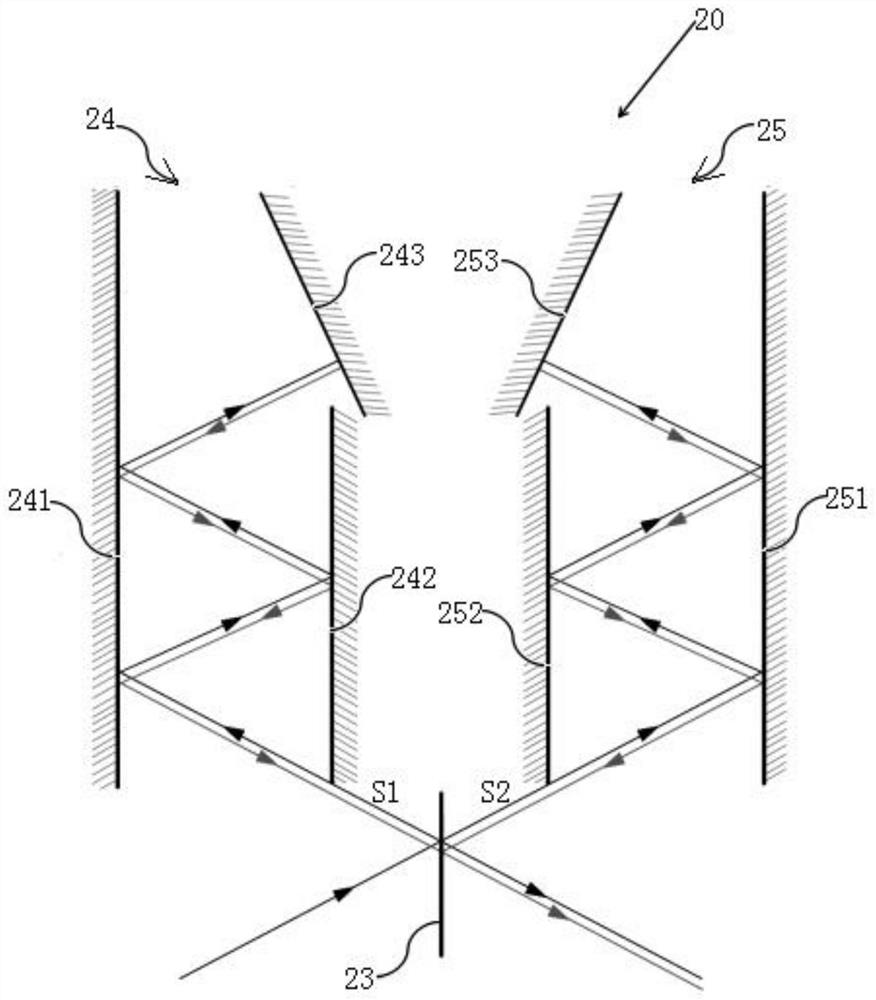
图2是本发明的实施例中多反射干涉仪的工作原理图;
图3是本发明的实施例中多反射干涉仪的结构示意图;
图4是本发明的实施例中移动组件和第二长反射镜的结构示意图;
图5是本发明的实施例中第三支撑单元的结构示意图;
图6是本发明的实施例中单片机控制多反射干涉仪和光传感器的流程示意图;
图7是本发明的实施例中上位机对下位机的控制流程示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,以下实施例结合附图对本发明多反射干涉仪及多反射干涉分光方法作具体阐述。
图1是本发明的实施例中多反射干涉自动测量系统的工作流程示意图。
如图1所示,本实施例中的多反射干涉自动测量系统100包括光源部10、多反射干涉仪20、光传感器40、放大电路50、模数转化部60以及控制部(图中未示出)。
光源部10包括激光光源(图中未示出)、收集器(图中未示出)以及准直器(图中未示出)。激光光源发射激光,该激光经过收集器收集并经过准直器准直处理后,作为入射光发射给多反射干涉仪20。
图2是本发明的实施例中多反射干涉仪的工作原理图;图3是本发明的实施例中多反射干涉仪的结构示意图;图4是本发明的实施例中移动组件和第二长反射镜的结构示意图。
如图2-4所示,多反射干涉仪20包括第一支撑单元21、第二支撑单元22、分束器23、第一反射单元24以及第二反射单元25。
第一支撑单元21具有支撑板211和匚形板212。支撑板211上均匀设置有多个通孔。匚形板212倒置在支撑板211上,其底部的两端向外侧延伸形成延伸板2121。延伸板2121上设置有与通孔相匹配的通槽2122。通过螺栓穿过通槽2122和通孔的方式将匚形板212固定在支撑板211上。匚形板212的顶部为一较大的平面,其表面均匀分布有多个贯穿孔2123。
如图3所示,第二支撑单元22设置在匚形板212上,数目为六个。每个第二支撑单元22均包括安装件221、第一支撑杆222、第一固定件223以及第一紧固螺栓224。
安装件221具有通槽,通过螺栓穿过通槽和贯穿孔2123的方式将安装件221固定在匚形板212的顶部。第一支撑杆222竖直连接在滑块上。第一固定件223套设在第一支撑杆222上,并且通过第一紧固螺栓224以螺栓固定的方式固定在第二支撑杆222上。拧紧该第一紧固螺栓224时,第一固定件223固定于第二支撑杆222上;拧松该第一紧固螺栓224时,可以将该第一固定件223绕第二支撑杆222水平转动,来调节第一固定件223的水平位置。本实施例中,第一固定件223可进行±3°调整水平角度。第一固定件223具有竖直设置的固定卡槽2231上,该固定卡槽2231用于放置对应的反射镜或分光镜。
分束器23设置在一个第二支撑单元22上,并且安装在该第二支撑单元22的固定卡槽2231上。分束器23为分光镜,用于接收入射光并将其分成两束光,分别为第一光束S1和第二光束S2。在本实施例中,入射光与分束器23之间的入射角为34°,入射光的线度为10mm。
第一光束S1为反射光束、第二光束S2为透射光束,或者第一光束S1为透射光束、第二光束S2为反射光束。在本实施例中,第一光束S1为反射光束、第二光束S2为透射光束。
第一反射单元24设置在分束器23的一侧,用于处理第一光束S1,包括第一长反射镜241、第一短反射镜242以及第一终端反射镜243。第一长反射镜241、第一短反射镜242以及第一终端反射镜243分别设置在三个第二支撑单元22上,并且安装在对应的固定卡槽2231上。第一长反射镜241和第一短反射镜242互相平行且相对设置,处于同一高度位置。第一终端反射镜243与第一短反射镜242设置在第一长反射镜241的同一侧。第一长反射镜241比第一短反射镜242更远离分束器23。第一长反射镜241、第一短反射镜242以及第一终端反射镜243均为平面反射镜。
第一光束S1先照射在第一长反射镜241上,然后在第一长反射镜241和第一短反射镜242之间进行多次反射后,垂直射入第一终端反射镜243后原路返回至分束器23。
在本实施例中,第一长反射镜241的长度为105mm,第一短反射镜242的长度为68mm,第一长反射镜241和第一短反射镜242的水平间距为40mm。第一光束S1在第一长反射镜241上的反射次数为2次。
第二反射单元25设置分束器23的另一侧,用于处理第二光束S2,包括第二长反射镜251、第二短反射镜252、第二终端反射镜253、移动组件254以及光栅尺255。第二长反射镜251、第二短反射镜252以及第二终端反射镜253均为平面反射镜。
第二短反射镜252和第二终端反射镜253分别设置在两个第二支撑单元22上。即,六个第二支撑单元22分别安装分束器23、第一长反射镜241、第一短反射镜242以及第一终端反射镜243、第二短反射镜252以及第二终端反射镜253。
如图4所示,移动组件254包括滚珠丝杆2541、滑块2542、步进电机2543以及动镜支架2544。
滚珠丝杆2541安装在支撑板211上,与第二短反射镜252相垂直设置。滑块2542套设在滚珠丝杆2541上并与滚珠丝杆2541形成滚珠-丝杆副。步进电机2543的输出轴通过联轴器与滚珠丝杆2541连接,用于带动滚珠丝杆2541转动进而带动滑块2542沿着滚珠丝杆2541的长度方向移动。本实施例中的滑块5242选用的是75mm行程、1.6kg重量且各方力矩小于0.05N·cm规格的光学滑台,步进电机2543为五相步进马达。
动镜支架2544安装在滑块2542上,包括第二支撑杆25441、第二固定件25442以及第二紧固螺栓25443。第二支撑杆25441竖直设置在滑块5242上。第二固定件25442套设在第二支撑杆25441上,并且通过第二紧固螺栓25443以螺栓固定的方式固定在第二支撑杆222上。本实施例中,第二固定件25442可进行±3°调整水平角度。第二固定件25442具有竖直设置的固定卡槽上,该固定卡槽用于放置第二长反射镜251。
光栅尺255安装在支撑板211上,并且与滚珠丝杆2541相平行设置。光栅尺255具有探头(图中未示出),探头通过连接件2511连接在滑块5242上,用于随滑块5242移动从而定位滑块5242的位置,产生光栅尺数据,进而允许对动镜位置精准调控和限制。光栅尺255选用的是60mm行程,分辨率为1μm且拥有一个零点位的增量式光栅尺。
如图2、3所示,第二长反射镜251,也可叫作动镜251,设置在第二固定件25442的固定卡槽中,并且第二长反射镜251和第二短反射镜252互相平行且相对设置在同一高度位置。第二终端反射镜253与第二短反射镜252设置在第二长反射镜251的同一侧。
第二光束S2先照射在第二长反射镜251上,然后在第二长反射镜251和第二短反射镜252进行多次反射后,垂直射入第二终端反射镜253后原路返回至分束器23。第一光束S1和第二光束S2在分束器23汇聚后作为出射光(激光干涉信号)输出。
在本实施例中,第二长反射镜251的长度为105mm,第二短反射镜252的长度为68mm。当第二长反射镜251位于其初始位置时,第二长反射镜251和第二短反射镜252之间的水平间距最小,为40mm;当第二长反射镜251位于其最终位置时,第二长反射镜251和第二短反射镜252之间的水平间距最大,为60mm。第一光束S1在第一长反射镜241上的反射次数为2次。第二反射单元25和第一反射单元24的最大光程差为132.65mm,此时的光程放大倍数为6.63,此时多反射干涉仪20的光谱分辨率为0.075cm
图5是本发明的实施例中第三支撑单元的结构示意图
第三支撑单元30包括第二匚形板31、探测器定位板32以及光屏定位板33。
第二匚形板31倒置在支撑板211上,并且与光源部10分别位于分束器23的两侧,其底部的两端向外侧延伸形成延伸板,该延伸板上设置有与通孔相匹配的第二通槽311,通过螺栓穿过第二通槽311和通孔的方式将第二匚形板31固定在支撑板211上。第二匚形板31的顶部设置有螺纹孔(图中未示出)。
探测器定位板32为L形板,具有连接在一起的第一水平板体321和第一竖直板体322,第一水平板体321的底部设置有第三通槽3211,通过螺栓穿过第三通槽3211和螺纹孔的方式将探测器定位板32固定在第二匚形板31上。第一竖直板体322用于安装光传感器40。
光屏定位板安33装在探测器定位板32上,为L形板,具有连接在一起的第二水平板体331和第二竖直板体332,第二水平板体331连接在第一水平板体321上,第二竖直板体332与第一竖直板体322相平行。第二竖直板体332具有光屏插槽3321,该光屏插槽3321用于插入光屏来调试干涉光信号。
光传感器40安装在第一竖直板体322,用于接收多反射干涉仪20发出的出射光(激光干涉信号),并将该光信号转化电信号。
放大电路50与光传感器40电连接,用于将电信号进行放大处理。
模数转化部60与放大电路50电连接,用于将放大后的电信号转化为数字信号。
控制部包括通信连接的上位机71和下位机72。下位机72为单片机,上位机71为具有输入显示功能的如电脑、PC端等。下位机72与光栅尺的探头通讯连接,并与模数转化部60通讯连接,用于收集光栅尺数据以及数字信号并传输给上位机71。下位机72还与步进电机2543通信连接,用于直接控制步进电机2543的运行,使得第二长反射镜251以预定的时间间隔从其初始位置沿着滚珠丝杆2541的长度方向逐渐移动至远离第二短反射镜252的最终位置。在每个时间间隔,第二长反射镜251由一个预定位置到另一个预定位置,并且所时间间隔包括移动时间和静止时间。下位机72还用于直接控制步进电机2543使得第二长反射镜251复位至其初始位置。
上位机71用于控制接收工作指令并命令下位机72控制光源部10、多反射干涉仪20、放大电路50以及模数转化部60的运行,并将下位机72发送来的数字信号进行处理从而得到干涉图并进行输出。举例来说,上位机71接收到工作开始指令后命令下位机72控制光源部10打开,多反射干涉仪20开始工作光传感器40打开,放大电路50以及模数转化部60开始工作,使得多反射干涉自动测量系统100工作。
如图1所示,多反射干涉自动测量系统100的工作过程包括以下步骤:
步骤S1,光源部10发射入射光。
步骤S2,入射光进入多反射干涉仪20从而产生出射光以及光栅尺数据。该过程为一种多反射干涉分光方法,包括以下子步骤:
步骤S2-1,入射光到达分束器23,被分束器分为第一光束S1和第二光束S2。
步骤S2-2,第一光束S1进入第一反射单元24,并在第一长反射镜241和第一短反射镜242之间进行多次反射,然后垂直射入第一终端反射镜243后返回至分束器23。
步骤S2-3,第二光束S2进入第二反射单元25,并在第二长反射镜251和第二短反射镜252之间进行多次反射,然后垂直射入第二终端反射镜253后返回至分束器23,期间在下位机72的控制下不断移动第二长反射镜251使得第二长反射镜251和第二短反射镜252之间间距逐渐变大。
步骤S2-4,返回分束器的第一光束S1和第二光束S2,在分束器汇聚后作为出射光输出。
步骤S3,光传感器40将出射光的光信号转换为电信号,并通过放大电路50后达到模数转换模块60,得到数字信号。因为第二长反射镜251逐渐移动,所以第二长反射镜251每移动至一个预定位置,光传感器40就会将出射光的这一光信号转换为电信号。
步骤S4,下位机72对转换好的数字信号以及干涉仪多反射干涉仪20中的光栅尺数据进行采集,之后再同上位机71进行串口通讯以上传数据,上位机对数据进行处理,得到干涉图与第一长反射镜241(动镜)移动距离。
上位机71接收到工作开始指令后命令下位机72进行光栅尺校准工作,然后移动第二长反射镜251到预设位置并开启扫描过程,扫描过程结束后将数据上传至上位机71,由上位机71进行下一步的计算分析。详细过程参见附图6、7。
图6是本发明的实施例中单片机控制多反射干涉仪和光传感器的流程示意图。
如图6所示,下位机72控制多反射干涉仪20和光传感器的过程包括以下步骤:
步骤SA-1,光栅尺寻找零点,然后进入步骤SA-2。
步骤SA-2,第二长反射镜(动镜)251移动至初始位置,然后进入步骤SA-3。
步骤SA-3,下位机72采集数据,该数据包括光栅尺数据和数字信号,然后进入步骤SA-4。
步骤SA-4,下位机72判断所采集的数据对应的采样点的数量是否达到预设数量或超出预设范围,若结果为是,然后进入步骤SA-6;若结果为否,然后进入步骤SA-5。
步骤SA-5,第二长反射镜(动镜)251以预定的时间间隔移动至下一个预定位置,步骤SA-3。
步骤SA-6,下位机72结束采集并将采集数据发送给上位机71。
图7是本发明的实施例中上位机对下位机的控制流程示意图。
如图7所示,上位机71控制下位机72的过程包括以下步骤:
步骤SB-1,上位机71通知下位机72开始工作,然后进入步骤SB-2。
步骤SB-2,上位机71监听下位机72,然后进入步骤SB-3。
步骤SB-3,上位机71判断是否得到来自下位机72的传输开始信号,若结果为是,然后进入步骤SB-4;若结果为否,然后进入步骤SB-2。
步骤SB-4,上位机71接收来自下位机72的采集数据,然后进入步骤SB-5。
步骤SB-5,上位机71判断所接受的采集数据是否为截止数据,若结果为是,表明传输完成,然后进入步骤SB-6;若结果为否,表明传输未完成,然后进入步骤SB-4。
步骤SB-6,上位机71对采集数据进行数据处理,从而生成并输出干涉图以及第一长反射镜241(动镜)移动距离。
实施例的作用与效果
根据本实施例所涉及的多反射干涉仪,因为具有分束器,第一反射单元和第二反射单元,第一反射单元具有第一长反射镜、第一短反射镜以及第一终端反射镜,第二反射单元具有第二长反射镜、第二短反射镜、第二终端反射镜以及移动组件,通过移动组件可以移动第二长反射镜,使得第二长反射镜和第二短反射镜间距逐渐变大,入射光经分束器分光后分为第一光束和第二光束,第一光束经第一长反射镜和第一短反射镜进行多次反射后,垂直射入第一终端反射镜后原路返回至分束器,第二光束经第二长反射镜和第二短反射镜进行多次反射后,垂直射入第二终端反射镜后原路返回至分束器,第一光束和第二光束在分束器汇聚后作为出射光输出,所以,该多反射干涉仪与传统迈克尔逊干涉仪相比,在同样的光谱分辨率下,因为拥有高的放大倍数,使得动镜的移动距离变短,进而缩短了干涉场测量时间,其测量时间约为迈克尔逊干涉仪的三分之一;此外,光程差放大倍数可以根据实际需要通过改变第二长反射镜和第二短反射镜之间的间距和光源的入射角度来实现,在工艺与采样率允许的前提下,放大倍数可以调整到实际需要的值,进而得到较高的光谱分辨率。
另外,上述多反射干涉仪降低了对时间调制型干涉仪中的振动影响与控制难度。在放大倍数较低的干涉仪中,如果希望得到较高的光谱分辨率,那么就需要较长的动镜移动距离,因此对动镜移动结构的工艺和控制有很高的要求。而应用了本方案的干涉仪,在获得相同的光谱分辨率时,可以将放大倍数调整到较高的数值来减小动镜移动距离,这样就大大减小了动镜移动过程中结构振动与环境抖动对测量带来的影响。
此外,本实施例的多反射干仪拥有紧凑型设计,便于小型化。因为在获得同样的光谱分辨的情况下,第二长反射镜移动距离变短,进而可以设计较短的动镜移动轨道,且整个干涉场自动测量系统可以依照某个比例进行缩放而不影响性能。
进一步地,因为第二反射单元还包括具有探头的光栅尺,探头通过连接件连接在滑块,控制部与探头通信连接,能够根据探头的位置信号定位滑块的位置,从而便于实现对第二场反射镜位置的精准控制。
进一步地,第一长反射镜和第二长反射镜的长度均为105mm,第一短反射镜和第二短反射镜的长度均为68mm,第一长反射镜和第一短反射镜的水平间距为40mm,第二长反射镜和第二短反射镜的水平间距最小为40mm,最大为60mm,第一长反射镜和第二长反射镜上的光束反射次数为2次,第二反射单元和第一反射单元的最大光程差为132.65mm,本实施例的系统在上述优化参数下光程放大倍数可达到6.63,为传统迈克尔逊干涉仪的3.315倍,在较短的动镜位移中提供更多的干涉光信息,并且其光谱分辨率可达到0.075cm
进一步地,因为第一支撑单元具有支撑板和方形板,支撑板上设置多个通孔,匚形板具有通槽,通过螺栓穿过通槽和通孔的方式可以非常方便地将匚形板固定在支撑板上。
进一步地,匚形板的顶部设置多个贯穿孔,第二支撑单元包括安装件、第一支撑杆以及第一固定件,安装件具有通槽,通过螺栓穿过通槽和贯穿孔的方式可以非常方便地将安装件固定在匚形板的顶部;第一支撑杆竖直连接在安装件上,第一固定件套设在第一支撑杆上,并且第一固定件以螺栓固定的方式固定在第二支撑杆上,具有固定卡槽,因此便于通过调节螺栓的松紧来调整固定卡槽在水平方向的位置。第二支撑单元的数目为六个,分别固定分束器、第一长反射镜、第一短反射镜、第一终端反射镜、第二短反射镜以及第二终端反射镜,这些结构是固定在对应支撑单元的固定卡槽上的,因此,通过这样的螺栓结构还可以保证第一长反射镜和第一短反射镜互相平行,第一光束经第一长反射镜和第一短反射镜进行多次反射后,能够垂直射入第一终端反射镜。
进一步地,因为匚形板倒置在支撑板上,第一反射单元等结构设置在匚形板上方,所以可以通过将移动组件的一部分设置在匚形板下方的方式来缩小整个多反射干涉仪的体积,并且这样的匚形板也便于安装第一反射单元等结构。
进一步地,因为上述多反射干涉仪的主要元件为六面平面反射镜和一面分束器,而没有其他对加工工艺要求过高的部分,光学元件易得;另一方面,大部分的元件都为固定位置且彼此独立,安放后不需要根据后续操作进行调整,便于装配。
根据实施例的多反射干涉分光方法,因为包括以下步骤:首先将入射光分为两束,一束进入第一反射单元,并在第一长反射镜和第一短反射镜之间进行多次反射,然后垂直射入第一终端反射镜后返回至;另一束进入第二反射单元,并在第二长反射镜和第二短反射镜之间进行多次反射,然后垂直射入第二终端反射镜后返回,期间不断移动所述第二长反射镜使得所述第二长反射镜和所述第二短反射镜之间间距逐渐变大;最后两束汇聚后输出,所以能够缩短测量时间,且放大倍数可以调整到实际需要的值,进而得到较高的光谱分辨率。
上述实施方式为本发明的优选案例,并不用来限制本发明的保护范围。
- 一种多反射干涉仪及多反射干涉分光方法
- 大口径反射镜干涉仪立式检测反射光斑自动定位方法