闭环反馈系统和电子器件
文献发布时间:2023-06-19 10:57:17
技术领域
本公开涉及传感器技术领域,具体地,涉及一种闭环反馈系统和电子器件。
背景技术
磁场传感器是可以将各种磁场及其变化的量转变成电信号输出的电子器件,由磁场传感器和磁体形成的闭环反馈系统可以根据磁场传感器在磁场中的不同位置反馈出电子器件不同的位移信息,受力信息或速度信息等。这种闭环反馈系统通常应用在短行程的位置检测,一方面电子器件的内部空间有限,另一方面因为基于磁性原理,磁场传感器在磁场中的敏感度往往伴随距离变大而降低。当磁场传感器与磁场的相对位移不断变大,磁场传感器可能无法正常工作,不能满足长行程的检测要求。
发明内容
本公开的目的是提供一种闭环反馈系统以及应用该闭环反馈系统的电子器件,以实现磁场传感器的较长行程位置检测。
为了实现上述目的,本公开提供一种闭环反馈系统,包括磁体和与所述磁体相对移动的磁场传感器,
所述磁体具有由分界线分成N极区和S极区的矩形的感测面;所述磁场传感器配置为平行于所述感测面移动,且移动方向与所述分界线成锐角。
可选地,所述分界线等分所述N极区和所述S极区。
可选地,所述感测面的背侧形成有与所述感测面的磁极分区相同的磁面。
可选地,所述分界线垂直于所述感测面的一对边;并且
所述磁场传感器配置为从所述感测面的一角向其对角方向移动。
可选地,所述分界线倾斜于所述感测面的边部;并且
所述磁场传感器配置为沿平行于所述感测面的一边的方向移动。
可选地,所述感测面的背侧形成有与所述感测面的磁极分区相反的磁面,其中,
所述磁体配置为由一个第一磁块分区充磁形成,或者
所述磁体配置为由两个第二磁块拼接形成,所述N极区和所述S极区分设在不同的第二磁块上,所述分界线形成在两个所述第二磁块的拼接处。
可选地,所述N极区和所述S极区分别形成为矩形,并且所述矩形的相对接的边部位置形成为所述分界线;并且
所述磁场传感器配置为从所述感测面的一角向其对角方向移动。
可选地,所述N极区和所述S极区分别形成为直角梯形,并且所述直角梯形的斜腰位置形成为所述分界线;并且
所述磁场传感器配置为沿平行于所述感测面的一边的方向移动。
可选地,所述磁场传感器为霍尔传感器。
根据本公开的第二个方面,提供一种电子器件,所述电子器件包括根据以上所述的闭环反馈系统。
通过上述技术方案,由于磁场传感器的移动方向与分隔N极区和S极区的分界线成锐角,而非垂直于该分界线,因此磁场传感器可以充分利用感测面的空间,即,在不影响检测功能的情况下,能够使磁场传感器在矩形的感测面内实现较大行程的位移,从而满足电子器件的长行程检测需求。
本公开的其他特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
附图是用来提供对本公开的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本公开,但并不构成对本公开的限制。在附图中:
图1是相关技术中一种闭环反馈系统的示意图;
图2是图1的正视图;
图3是相关技术中另一种闭环反馈系统的示意图;
图4是图3的正视图;
图5是根据本公开实施例的一种闭环反馈系统中磁体的磁力线分布图;
图6是根据本公开一种实施方式的闭环反馈系统的示意图;
图7是图6的正视图;
图8是图7的另一个角度的正视图;
图9是根据本公开另一种实施方式的闭环反馈系统的示意图;
图10是图9的正视图;
图11是根据本公开实施例的另一种闭环反馈系统中磁体的磁力线分布图;
图12是根据本公开另一种实施方式的闭环反馈系统的示意图;
图13是根据本公开另一种实施方式的闭环反馈系统的示意图;
图14是根据本公开另一种实施方式的闭环反馈系统的示意图;
图15是图14的正视图;
图16是图14的另一个角度的正视图;
图17是根据本公开另一种实施方式的闭环反馈系统的示意图;
图18是图17的正视图。
附图标记说明
10 磁体 101 分界线
102 N极区 103 S极区
11 第一磁块 12 第二磁块
20 磁场传感器 L11 第一路径
L21 第二路径 L12 第三路径
L13 第四路径 L22 第五路径
L23 第六路径
具体实施方式
以下结合附图对本公开的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本公开,并不用于限制本公开。
在本公开中,在未作相反说明的情况下,使用的方位词如“上”“下”是针对相应的正投影视图的图面方向而言的。
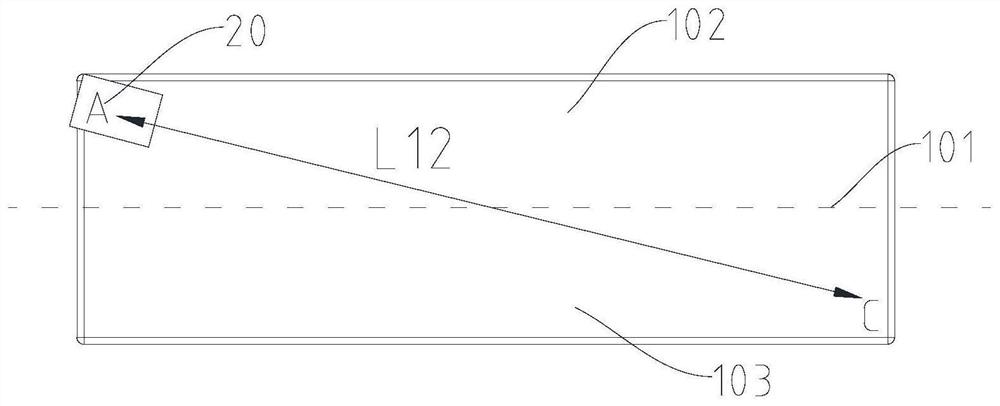
本公开实施例提供的闭环反馈系统为磁差式闭环反馈系统,磁场传感器在磁体产生的磁场中运动时,根据磁场强度的变化,可以反馈该磁场传感器的位置。需要说明的是,为体现本公开实施例的有益效果,相关技术与本公开实施例中构造相似的磁体具有相同尺寸的外轮廓,具体地,图2、图7、图8、图10的矩形的感测面具有相同的尺寸,图4、图15、图16、图18的矩形的感测面具有相同的尺寸。
参照图1-图4,本公开实施例涉及的闭环反馈系统包括磁体10和与磁体10相对移动的磁场传感器20。其中,磁体10具有由分界线101分成N极区102和S极区103的矩形的感测面。这里,感测面为图2和图4中垂直于图面方向面向外侧的表面。图1-图4示出了两种磁体10的配置形式,其中,在图1和图2的示例中,磁体10配置为由一个第一磁块11形成,N极区102和S极区103上下分布,分界线101横向分隔N极区102和S极区103,分界线101可以在磁体10的充磁过程形成,这里不做展开说明。磁场传感器20沿图示的第一路径L11垂直于分界线101移动,其最大行程为第一路径L11的长度。在图3和图4的示例中,磁体10配置为由两个第二磁块12上下拼接形成,其感测面与图1的示例类似,N极区102和S极区103上下分布,分界线101为两个第二磁块12的对接线,横向分隔N极区102和S极区103。磁场传感器20沿图示的第四路径L21垂直于分界线101移动,其最大行程为第二路径L21的长度。
参照图5-图18,本公开实施例提供的闭环反馈系统中,磁场传感器20配置为平行于感测面移动,且移动方向与分界线101成锐角,从而可以选择性地调整磁场传感器20的行程。需要说明的是,本公开实施例只限制磁场传感器20和磁体10的相对移动方向,并不限制在实际使用中哪一者移动、哪一者固定。在图7中,磁场传感器20沿图示的第三路径L12倾斜于分界线101移动。对比图2,由于相关技术中磁场传感器20配置为垂直于分界线101移动,如上所述,其最大行程为第一路径L11的长度,也即大体为图中A、B两点的距离;而图7中,磁场传感器20的最大行程为第三路径L12的长度,也即大体为图中A、C两点的距离,显然第三路径L12的长度大于第一路径L11的长度。另外,在磁体10构造相同的情况下,图2中的B位置与图7中的C位置磁场强度相同,也就是说,本公开实施例中,磁场传感器20从A位置出发,到达相同磁场强度位置(到达C位置)的行程相较于相关技术(到达B位置)得到了显著提升。类似地,再如图15,磁场传感器20沿图示的第五路径L22倾斜于分界线101移动。对比图4,由于相关技术中磁场传感器20配置为垂直于分界线101移动,如上所述,其最大行程为第二路径L21的长度,也即大体为图中X、Y两点的距离;而图15中,磁场传感器20的最大行程为第五路径L22的长度,也即大体为图中X、Z两点的距离,显然第五路径L22的长度大于第二路径L21的长度。另外,在磁体10构造相同的情况下,图4中的Y位置与图15中的Z位置磁场强度相同,也就是说,本公开实施例中,磁场传感器20从X位置出发,到达相同磁场强度位置(到达Z位置)的行程相较于相关技术(到达Y位置)得到了显著提升。
通过上述技术方案,由于磁场传感器20的移动方向与分隔N极区102和S极区103的分界线101成锐角,而非垂直于该分界线101,因此磁场传感器20可以充分利用感测面的空间,即,在不影响检测功能的情况下,能够使磁场传感器20在矩形的感测面内实现较大行程的位移,从而满足电子器件的长行程检测需求。
进一步地,分界线101可以配置为等分N极区102和S极区103,即N极区102和S极区103的尺寸相同,使得整个磁体10可以形成对称的磁力线分布,方便布置电子器件中磁场传感器20的位置与位移的对应关系,提高感测精度,具体在图7中,A位置和C位置的磁场强度相同,只是磁力线方向相反。例如当磁体10由一个第一磁块11形成时,N极区102和S极区103均分感测面,当磁体10由两个第二磁块12拼接形成时,两个磁块12的尺寸相同。当然本公开实施例对N极区102和S极区103的大小不做限定,二者也可以具有不同的尺寸。
根据本公开的第一种实施例,感测面的背侧形成有与感测面的磁极分区相同的磁面,具体参照图5,图中磁体的下表面作为感测面,上表面作为感测面的背侧,以图中虚线为分界线,感测面及其背面的N极均对应虚线左侧,S极均对应虚线右侧。
在这种情况下,磁体10配置为由一个第一磁块11经过充磁形成,根据一种实施例,参照图7,分界线101可以垂直于感测面的一对边,沿图面方向左右延伸,磁场传感器20配置为从感测面的一角向其对角方向移动,以最大化其行程。由于本公开实施例只限制磁场传感器20和磁体10的相对移动,而不限制二者的实际放置形式以及实际由哪一者移动,因此,该闭环反馈系统在实际应用时可以适当调整各部件摆放方向。以图7和图8为例,仅参照附图而言,二者仅仅是摆放角度不同,假定图示位置为实际使用时的方向和摆放角度,那么图7示出的示例更节省空间,而图8示出的示例可以使磁场传感器20沿水平方向移动。
根据另一种实施例,参照图9和图10,分界线101可以倾斜于感测面的边部,沿图面的左上和右下方向延伸,磁场传感器20配置为沿平行于感测面的一边的方向移动,即沿图面的左右方向(第四路径L13)移动。这样,与上述的图7和图8两种情况相比,图10示出的示例既可以节省空间,又可以使磁场传感器20沿水平方向移动。当然磁场传感器20也可以沿其他方向移动,这里不做展开说明。
根据本公开的第二种实施例,感测面的背侧形成有与所述感测面的磁极分区相反的磁面,具体参照图11,图中磁体的下表面作为感测面,上表面作为感测面的背侧,以图中虚线为分界线,感测面的N极区102在虚线左侧,S极区103在虚线右侧,其背侧与之相反。
在这种情况下,磁体10可以配置为由一个第一磁块11分区充磁形成,或者磁体10可以配置为由两个第二磁块12拼接形成,此时N极区102和S极区103分设在不同的第二磁块12上,分界线101形成在两个第二磁块12的拼接处。其中,在磁体10配置为由一个第一磁块11形成的情况下,第一磁块11如图12和图13所示,其中图12示出的示例所对应的正视图可参照图7和图8,图13示出的示例所对应的正视图可参照图10。
下面的描述以磁体10配置为由两个第二磁块12形成的情况为例进行说明,而磁体由一个第一磁块11形成的情况与之类似,不再展开赘述。
根据一种实施例,参照图14-图16,N极区102和S极区103分别形成为矩形,并且矩形的相对接的边部位置形成为分界线101,磁场传感器20配置为从感测面的一角向其对角方向移动,以最大化其行程。与上述图7和图8的所示出的情况类似地,根据图15和图16,闭环反馈系统在实际应用时可以适当调整各部件摆放方向。
根据另一种实施例,参照图17和图18,N极区102和S极区103分别形成为直角梯形,并且直角梯形的斜腰位置形成为分界线101,磁场传感器20配置为沿平行于感测面的一边的方向移动(第六路径L23)。或者N极区102和S极区103分别形成为直角三角形,并且直角三角形的斜边位置形成为分界线101。图18示出的示例与上述的图10示出的示例类似,具有相似的有益效果和配置方式,这里也不再说明。
本公开实施例提供的磁场传感器20可以为霍尔传感器。霍尔器件具有体积小、重量轻、功耗小、等优点,广泛地用作位置检测的传感器,可以很好地适应检测精度要求较高的电子器件,能够反馈电子器件中移动部件的位移,或通过该位移进一步反馈电子器件的受力信息或速度信息等。
本公开实施例还提供一种电子器件,该电子器件具有上述的闭环反馈系统并具有该闭环反馈系统的全部有益效果。该电子器件例如可以为应用于光学模组的光学驱动器,用于检测光学模组中部件的位移。
以上结合附图详细描述了本公开的优选实施方式,但是,本公开并不限于上述实施方式中的具体细节,在本公开的技术构思范围内,可以对本公开的技术方案进行多种简单变型,这些简单变型均属于本公开的保护范围。
另外需要说明的是,在上述具体实施方式中所描述的各个具体技术特征,在不矛盾的情况下,可以通过任何合适的方式进行组合,为了避免不必要的重复,本公开对各种可能的组合方式不再另行说明。
此外,本公开的各种不同的实施方式之间也可以进行任意组合,只要其不违背本公开的思想,其同样应当视为本公开所公开的内容。
- 闭环反馈系统和电子器件
- 一种控制光缆护套偏心及厚度的闭环反馈系统