一种菊花采摘方法
文献发布时间:2023-06-19 10:58:46
技术领域
本发明涉及农业机械技术领域,具体涉及一种菊花采摘方法。
背景技术
近年来目前我国菊花的种植面积快速增长,仅在江苏省现有的种植面积已超百万亩。除了用于观赏和供应花卉市场外,有大量的菊花种植是为了给食品、药品和保健品生产提供原料。作为食品、药品和保健品用途的菊花品种包括杭白菊、北京菊、晚菊、金丝菊等,这些品种菊花在采摘期的生长高度一般为350-550mm,茎直立,,头状花序单生或数个集生于茎枝的顶端,直径32-46mm,大小不一,与头状花序相连茎枝的直径约为1.5-2.5mm,采摘时头状花序与茎枝连接处的平均断裂强度平均约为2.5-7.5N。
经检索,目前未见机械化采摘菊花方法技术的报道。目前菊花是人工用手或使用简易工具向上拽拉头状花序,使其与茎枝连接处断开而完成采摘。由于即使在同一块地里生长、相同的菊花品种,在采摘期菊花的生长高度也有较大的差异,(一般高度相差约为200mm),加之头状花序分布疏密不均,依靠人工采摘会带来劳动强度大、效率低和成本高等问题。因此,采用机械化采摘菊花是市场的迫切需求。
发明内容
本发明目的在于提供一种菊花全自动化采摘方法,以解决上述问题。
为实现上述目的,本发明公开了一种菊花采摘方法,采用一菊花采摘机采摘,所述菊花采摘机包括行走动力底盘和安装在所述行走动力底盘上的采摘输送台,采摘高度调节装置以及收集装置,所述采摘输送台包括支架和安装在所述支架上的链式采摘输送机构,所述采摘高度调节装置的一端与所述支架的前端铰接,另一端与所述行走动力底盘铰接,所述支架的后端与所述行走动力底盘铰接,所述链式采摘输送机构包括沿输送方向设置的多排梳齿板条,所述梳齿板条沿着所述链式采摘输送机构的宽度方向布设有多个用于采摘菊花的梳齿,所述链式采摘输送机构的输送方向的后端与所述收集装置连接,包括如下步骤:
S1:通过采摘高度调节装置控制链式采摘输送机构的前端下降至菊花的花层下方,控制梳齿板条沿输送方向运动;
S2:控制行走动力底盘向前运动,通过实时检测行走动力底盘的运动速度和链式采摘输送机构的倾角以控制梳齿的运动速度,确保梳齿以垂直或者以向后倾斜的轨迹向上运动;
S3:梳齿采摘完菊花后输送到收集装置内,直至菊花采摘完成。
进一步的,沿着输送方向前后相邻的所述梳齿的间距大于沿着输送方向前后相邻的梳齿的轨迹线的水平间隔距离。
进一步的,在所述步骤S2中,控制V
进一步的,所述链式采摘输送机构还包括驱动电机、主动链轮、从动链轮、套筒滚子链和平面板条,所述多排梳齿板条和平面板条的底部均与所述套筒滚子链铰接并形成一菊花输送面,所述驱动电机与所述主动链轮传动连接,所述套筒滚子链的两端分别与所述主动链轮和从动链轮传动连接。
进一步的,还包括芯轴,相邻所述梳齿板条和平面板条以及相邻所述平面板条均前后嵌套并与所述芯轴铰接,且所述芯轴的两端与所述套筒滚子链的滚子套筒铰接。
进一步的,所述梳齿板条包括多个与所述芯轴铰接的梳齿板条单元,所述平面板条包括与所述芯轴铰接的平面板条单元,所述梳齿板条单元和所述平面板条单元均采用工程塑料注塑而成。
进一步的,所述支架包括左侧板、右侧板和支撑架,所述支撑架的两端与所述左侧板和右侧板固接,所述支撑架与采摘高度调节装置铰接,与所述主动链轮枢接的主动轴和与所述从动链轮枢接的从动轴的两端均与所述左侧板和右侧板枢接,所述旋转驱动件安装在所述左侧板或右侧板上。
进一步的,所述梳齿板条上相邻所述梳齿的间隔距离为4-8mm,且所述梳齿的端部向所述链式采摘输送机构的输送方向的后端弯曲。
进一步的,所述梳齿为由数段相切的弧线和直线组成的弓形结构,所述梳齿的上下两端的距离大于45mm;且相对于所述梳齿的上下两端点的连线,所述梳齿的最大下凹深度不小于15mm,所述梳齿前端轮廓线的上部为一向上翘起的直线,所述直线与梳齿板条的底部平面的夹角小于10度。
进一步的,所述收集装置包括横向带式输送装置、纵向带式输送装置和收集箱,所述横向带式输送装置的输送带位于所述链式采摘输送机构的输出端的下方,所述纵向带式输送装置的输送带的输入端位于所述横向带式输送装置的输送带的输出端的下方,所述纵向带式输送装置的输送带的输出端位于所述收集箱的上方。
与现有技术相比,本发明的优点在于:
本发明的采摘方法可以根据菊花的生长高度由采摘高度调节装置将采摘输送台的前端调节到合适的高度,从而提高了采摘机的适应性;梳齿向前运动时相邻的梳齿会插在头状花序下方茎枝的两侧,向上运动时会使头状花序与茎枝分离,向上和向后运动时可托住采摘下的头状花序并抛送到采摘输送台上,当头状花序被输送到采摘输送台的后方时,被抛离落入到收集装置中,从而完成菊花的采摘和收集的全自动化过程;进一步控制梳齿的轨迹线向向上和向后运动,避免将未进入梳齿的菊花向前推移而导致后续梳齿不能正常作业。
下面将参照附图,对本发明作进一步详细的说明。
附图说明
构成本申请的一部分的附图用来提供对本发明的进一步理解,本发明的示意性实施例及其说明用于解释本发明,并不构成对本发明的不当限定。在附图中:
图1是本发明优选实施例公开的菊花采摘方法的过程示意图;
图2是本发明优选实施例公开的菊花采摘方法的控制示意图;
图3是本发明优选实施例公开的链式梳齿菊花采摘机的主视示意图;
图4是本发明优选实施例公开的链式梳齿菊花采摘机的俯视示意图;
图5是本发明优选实施例公开的采摘输送台的结构示意图;
图6是本发明优选实施例公开的采摘输送台的右视示意图;
图7是本发明优选实施例公开的采摘输送台的左视示意图;
图8是本发明优选实施例公开的梳齿板条与芯轴的装配轴测示意图;
图9是本发明优选实施例公开的梳齿板条与芯轴的装配主视示意图;
图10是本发明优选实施例公开的平面板条与芯轴的装配主视示意图;
图11是本发明优选实施例公开的平面板条与芯轴的装配主视示意图;
图12是本发明优选实施例公开的梳齿板条单元的轴测示意图;
图13是本发明优选实施例公开的梳齿板条单元的侧视示意图。
图例说明:
1、采摘输送台;11、支架;111、左侧板;112、右侧板;113、支撑架;12、链式采摘输送机构;121、梳齿板条;1211、梳齿;1212、连线;1213、梳齿板条单元;122、主动链轮;123、从动链轮;124、套筒滚子链;125、驱动电机;126、平面板条;1261、平面板条单元;127、芯轴;128、主动轴;129、从动轴;
2、行走动力底盘;
3、采摘高度调节装置;
4、收集装置;41、横向带式输送装置;42、纵向带式输送装置;43、收集箱。
5、B轨迹线;6、B齿;7、A轨迹线;8、A齿。
具体实施方式
以下结合附图对本发明的实施例进行详细说明,但是本发明可以由权利要求限定和覆盖的多种不同方式实施。
如图3-13所示,本发明实施例首先公开了一种链式梳齿菊花采摘机,包括行走动力底盘2和安装在行走动力底盘2上的采摘输送台1、采摘高度调节装置3以及收集装置4,行走动力底盘2可以为轮胎行走或者履带行走方式,采摘高度调节装置3采用液压油缸或者电动推杆,在采摘作业状态下,采摘输送台1与水平面的倾角为15-60度。采摘输送台1包括支架11和安装在支架11上的链式采摘输送机构12,采摘高度调节装置3的一端与支架11的前端铰接,另一端与行走动力底盘2铰接,具体根据菊花的生长高度由采摘高度调节装置3将采摘输送台1的前端调节到合适的高度,支架11的后端与行走动力底盘2铰接,链式采摘输送机构12包括沿输送方向设置的多排梳齿板条121,梳齿板条121沿着链式采摘输送机构12的宽度方向布设有多个用于采摘菊花的梳齿1211,从而,通过采摘高度调节装置3和行走动力底盘2的联动,从而实现梳齿板条121的向前、向上和向后的复合运动,具体的,梳齿1211向前运动时相邻的梳齿1211会插在头状花序下方茎枝的两侧,向上运动时会使头状花序与茎枝分离,向上和向后运动时可托住采摘下的头状花序并抛送到采摘输送台1上。由于链式采摘输送机构12的输送方向的后端与收集装置4连接,所以,采摘后的菊花会自动输送到收集装置4内,从而实现菊花采摘和收集的全自动化。
在本实施例中,链式采摘输送机构12还包括驱动电机125、主动链轮122、从动链轮123、套筒滚子链124和平面板条126,多排梳齿板条121和平面板条126的底部均与套筒滚子链124铰接并形成一菊花输送面,具体的,相邻梳齿板条121之间的距离为2个链节距,且相邻梳齿板条121之间铰接2个平面板条126,菊花输送面可以防止菊花输送到收集装置4前坠落,驱动电机125为电机,与主动链轮122传动连接,套筒滚子链124的两端分别与主动链轮122和从动链轮123传动连接,从而实现一边采摘一边输送的功能。
在本实施例中,为了实现梳齿板条121、平面板条126和套筒滚子链124的连接,还包括芯轴127,相邻梳齿板条121和平面板条126以及相邻平面板条126均前后嵌套并且与芯轴127铰接,即芯轴127穿过相邻梳齿板条121和平面板条126侧面的孔,同时芯轴127穿过邻平面板条126一侧的孔(当相邻梳齿板条121之间设置两个平面板条126时),且芯轴127的两端与套筒滚子链124的滚子套筒铰接,巧妙地将梳齿板条121、平面板条126和套筒滚子链124结合,进而简化了整体的结构,避免类似焊接变形和焊接工作量的增加。
在本实施例中,梳齿板条121包括多个与芯轴127铰接的梳齿板条单元1213,平面板条126包括与芯轴127铰接的平面板条单元1261,梳齿板条单元1213和平面板条单元1261均采用工程塑料注塑而成,通过分体式注塑成形的工艺,从而显著降低了梳齿板条121和平面板条126的制造成本。
在本实施例中,支架11包括左侧板111、右侧板112和支撑架113,支撑架113的两端与左侧板111和右侧板112固接,左侧板111和右侧板112同时起到左右挡板的作用,防止菊花从两侧滑落。支撑架113与采摘高度调节装置3铰接,与主动链轮122铰接的主动轴128和与从动链轮123铰接的从动轴129的两端均与左侧板111和右侧板112铰接,驱动电机125安装在左侧板111或右侧板112上。
在本实施例中,在具体设置时,梳齿板条121上相邻梳齿1211的间隔距离为4-8mm,该距离大于菊花花茎直径而小于菊花的外径,便于采摘。且梳齿1211的端部向链式采摘输送机构12的输送方向的后端弯曲,从而菊花采摘脱离花茎后,防止菊花从梳齿1211的端部脱出。具体的,经过反复实验,梳齿1211为由数段相切的弧线和直线组成的弓形结构,梳齿1211的上下两端的距离大于45mm;且相对于梳齿1211的上下两端点的连线1212,梳齿1211的最大下凹深度不小于15mm,梳齿1211前端轮廓线的上部为一向上翘起的直线,直线与梳齿板条121的底部平面的夹角小于10度,在该尺寸结构下,菊花的采摘效果最佳。
在本实施例中,在本实施例中,收集装置4包括横向带式输送装置41、纵向带式输送装置42和收集箱43,横向带式输送装置41的输送带位于链式采摘输送机构12的输出端的下方,从而链式采摘输送机构12落下的花朵会掉入到横向带式输送装置41的输送带上,纵向带式输送装置42的输送带的输入端位于横向带式输送装置41的输送带的输出端的下方,进而横向带式输送装置41的输送带上的花朵会掉入到纵向带式输送装置42的输送带上,纵向带式输送装置42的输送带的输出端位于收集箱43的上方,同样的,纵向带式输送装置42的输送带上的花朵会落入到收集箱43内。其中,收集箱43为可替换式的安装,一旦装满,即可更换空箱子或者将其转倒入其他容器。
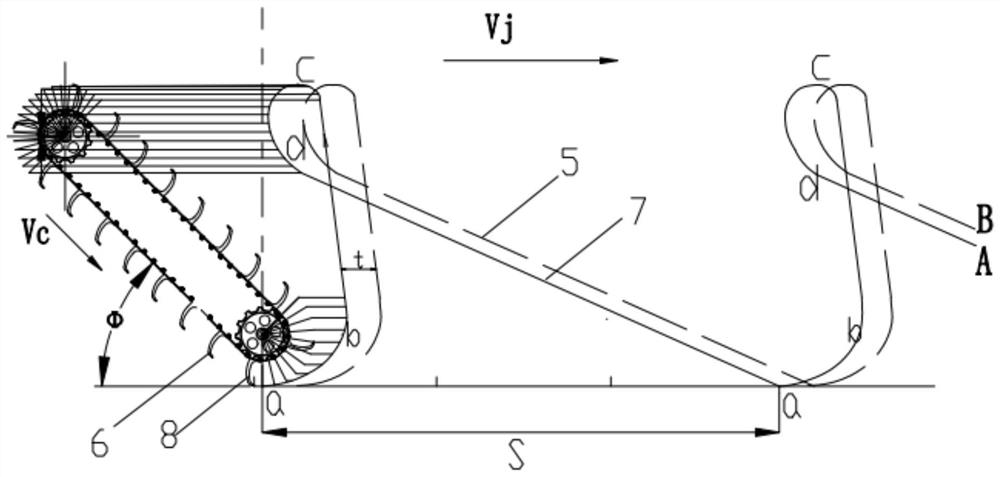
然后,本发明公开了一种菊花采摘方法,如图1-2所示,采用上述菊花采摘机,其中,参见图1,为了模拟人工采摘运动过程,通过采摘机底盘的向前直线运动和梳齿运转产生的(两段直线和两段圆弧)链传动特征运动的两个运动的叠加成一条适合于菊花采摘的采摘运动轨迹来完成菊花采摘过程的插入抓取(对应ab段)、上提采摘和输送(对应bc段)、花朵投放(对应cd段)以及回程(对应da段)共四个工作环节。具体的,包括如下步骤:
S1:通过采摘高度调节装置3控制链式采摘输送机构12的前端下降至菊花的花朵层下方,控制梳齿板条121沿输送方向运动,可以看作对应图1的ab段,梳齿1211插入抓取段,在此段梳齿1211右下而上、由后而前伸入花丛并将花柄卡进梳齿1211的齿间,花朵位于梳齿1211上方,梳齿1211完成采摘前的抓取过程;
S2:控制行走动力底盘2向前运动,通过实时检测行走动力底盘2的运动速度V
其在水平方向上的速度:
为了满足梳齿1211在进入摘取阶段的运动(即bc段轨迹)为一垂直向上运动的直线,即在水平方向的运动速度为“0”:
在数值上,V
当V
当V
当V
S3:待梳齿采摘完菊花后,采摘下的花朵被输送到采摘链顶端时,在输送速度惯量和重力的作用下花朵被抛入链式采摘输送机构12内,此为cd段,然后通过采摘高度调节装置3控制链式采摘输送机构12的前端下降至菊花的花朵的下方,对应da段,为回程段。
其中,沿着输送方向前后相邻的梳齿1211的间距大于沿着输送方向前后相邻的梳齿1211的轨迹线的水平间隔距离,具体的,参见图1,A齿的运动轨迹为A轨迹线7,B齿6的运动轨迹为B轨迹线5,B轨迹线5是与A齿8紧邻的B齿6的采摘轨迹线,A轨迹线7和B轨迹线5间的水平间隔距离t称为单个梳齿1211的有效采摘距离。为了防止漏采现象发生,显然应该满足单个梳齿1211的有效采摘距离t小于梳齿开口长度l,即:t<l,否则会产生漏采现象。
实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 内吸式空心轴旋转菊花采摘机及其采摘方法
- 一种种植菊花用的菊花采摘装置