一种果蔬采摘机器人用目标识别系统
文献发布时间:2023-06-19 11:00:24
技术领域
本发明涉及果蔬采摘技术领域,具体为一种果蔬采摘机器人用目标识别系统。
背景技术
随着我国膳食结构的优化,人们对果蔬的需求逐渐多样化,需求规模也逐渐增长,因此促进了我国果蔬种植业的发展,在果蔬种植业快速发展、优化的同时,与之相关的其他产业也被迫进行相应的优化整改,以适应果蔬种植业的发展需求,其中果蔬成熟后需要及时将其采摘、加工并销售,避免成熟期过后留在种植园内过度成熟甚至发生腐烂,鉴于果蔬通常为单片集中成熟,采摘工作量较大,单纯依靠人工采摘,无法满足采摘需求,因此采摘机器人的出现就很好的解决了采摘劳动力不足的问题。
现有的存在的缺陷是:
1、对比文件CN109729320A公开了一种实时对象识别监测平台,“包括:鼾声检测设备,设置在门诊楼走廊位置,用于对门诊楼走廊位置处的声音进行鼾声信号提取,以基于鼾声信号的最大幅值确定对应的鼾声等级;摄像触发设备,分别与鼾声检测设备和走廊摄像设备连接,用于在接收到的鼾声等级大于等于预设等级阈值时,触发所述走廊摄像设备对门诊楼走廊位置处进行拍摄操作以获得走廊现场图像。本发明的实时对象识别监测平台监控方便、操作简单。由于在门诊楼走廊位置中鼾声过高时,执行对所述位置的床体识别操作,以采用自动化模式有效维持门诊楼走廊秩序,从而能够在减少人力成本的情况下,有效维持门诊楼的走廊秩序”,但是该种目标识别方式对仪器的精准度要求较高,且需要对声音进行判断,容易受到其他声音的干扰,导致装置的成本较高且准确度不足,不便推广使用;
2、对比文件CN210298571U公开了一种番茄采摘机器人的机械手机构,“包括机械手臂和采摘手;所述采摘手包括手爪和收纳斗;所述手爪通过安装座固定连接固定板,所述安装座内设有空腔且空腔内设有夹持结构,所述夹持结构包括第一夹持块、第二夹持块、第一齿条、第二齿条和夹持齿轮;所述手爪包括第一夹臂和第二夹臂,所述第一夹臂连接第一夹持块的前端,所述第二夹臂连接第二夹持块的前端;所述第一夹臂的前端设有缺口,所述缺口内设有刀片,所述第二夹臂的前端设有与刀片相对应的刀槽。本实用新型提供一种番茄采摘机器人的机械手机构,配套番茄采摘机器人,协助采摘机器人共同完成番茄的采摘工作”,但是缺乏相应的分类筛选装置,导致装置采摘的果蔬混合在一起,加大了后续的筛选工作量,延长了后续的加工工序,降低了加工效率;
3、对比文件CN209709047U公开了一种带机器识别功能锂电工具电池包,“包括外壳,所述外壳的顶部固定连接有顶盖,所述顶盖的顶部活动连接有拉架,所述顶盖的底部且位于外壳的内部固定连接有对接架,两个所述对接架的相对侧之间均固定连接有抵盘。该带机器识别功能锂电工具电池包,通过设置电池包与下安装架为固定结构,且下安装架通过外抵架、内抵架和弹簧抵消外部给予的横向冲力,而下安装架的外部由对接架和抵盘抵住并进行限位,进而防止因意外掉落导致电池包受到损伤,达到了保护性好的效果,从而有效的解决了锂电工具电池包一般使用时因无防护装置可能导致其安全性较差的问题”,在实现对装置提供限位保护的基础上,没有提供相应的便于获取的结构,导致装置的取用更换较为不便。
发明内容
本发明的目的在于提供一种果蔬采摘机器人用目标识别系统,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种果蔬采摘机器人用目标识别系统,包括移动底座、筛选箱、果蔬识别室、接料盒和承接板,所述移动底座的顶部安装有筛选箱,所述移动底座的顶部焊接有液压升降杆,且液压升降杆位于筛选箱的一侧,所述液压升降杆的顶部滑动安装有延伸杆,所述延伸杆的表面对称安装有两组横杆,所述横杆远离延伸杆的一端通过贯穿的螺栓安装有剪切采摘箱,所述剪切采摘箱的一侧表面安装有控制板,所述剪切采摘箱的内部安装有果蔬识别室,且果蔬识别室的底部设有延伸至剪切采摘箱外部的出气管,所述剪切采摘箱的底部通过贯穿的螺栓安装有接料盒,且接料盒的正面凸出剪切采摘箱的正面,所述筛选箱的内部安装有传送筛选管,所述传送筛选管的表面连接有三组引料板,且引料板的一端延伸进传送筛选管的内部,所述筛选箱的内壁安装有三组上下布置的隔板,所述三组隔板的顶部表面滑动安装有一号收集抽屉、二号收集抽屉和三号收集抽屉,所述一号收集抽屉、二号收集抽屉和三号收集抽屉的正面均安装有把手,且把手位于筛选箱的外部,所述一号收集抽屉、二号收集抽屉和三号收集抽屉的背面均设有四组圆形的传送口,所述一号收集抽屉、二号收集抽屉和三号收集抽屉的内部均放置有承接板。
优选的,所述果蔬识别室的内部安装有微型负压风机,果蔬识别室的正面安装有输气管,输气管延伸至剪切采摘箱的外部,输气管远离微型负压风机的一端密封连接有吸气漏斗,吸气漏斗固定在剪切采摘箱的正面,吸气漏斗位于接料盒的上方,吸气漏斗的内壁安装有滤板,剪切采摘箱的内部底部安装有反应瓶,反应瓶的内部盛放有高锰酸钾溶液,输气管的底部密封安装有传送软管,传送软管的底部延伸至反应瓶的内部,传送软管的底部靠近反应瓶的底壁,反应瓶的内部安装有单向输气管,且单向输气管的内部安装有单向阀,单向输气管的输入端靠近反应瓶的顶壁位置,单向输气管的输出端延伸至剪切采摘箱的底部。
优选的,所述传送筛选管的内壁安装有一号筛选盘和二号筛选盘,二号筛选盘位于一号筛选盘的下方,传送筛选管的内壁安装有三号筛选盘,三号筛选盘位于二号筛选盘的下方,一号筛选盘、二号筛选盘和三号筛选盘的内部均安装有圆形的筛选孔,筛选孔的直径依次减小,筛选孔的内壁安装有弹性塑料条。
优选的,所述承接板的顶部安装有U型的限位框,限位框为海绵制成,承接板的两侧表面均安装有拉绳。
优选的,所述剪切采摘箱的两侧内壁顶部位置均安装有电磁继电器,剪切采摘箱的内部安装有两组交叉叠放的剪刀刀柄,剪刀刀柄的正面延伸出剪切采摘箱的内部,剪刀刀柄位于吸气漏斗的上方,剪刀刀柄的表面装有刀片,剪刀刀柄的表面安装有连接弹簧,且连接弹簧位于刀片的后方,剪刀刀柄的表面环绕安装有磁铁环,且磁铁环位于连接弹簧的后方。
优选的,所述移动底座的底部四角均安装有移动轮。
优选的,所述控制板的内部安装有透视窗和控制按钮,控制按钮位于透视窗的后方,控制按钮通过导线与液压升降杆、电磁继电器、微型负压风机电性连接,透视窗的位置与反应瓶的安装位置对应。
优选的,所述接料盒的顶部设有进料口,接料盒的底部设有出料口,接料盒的两侧内壁均安装有轴件,接料盒的两侧内壁通过轴件均安装有倾斜的导料板,导料板为泡沫板制成,接料盒的内部底壁安装有两组压缩弹簧,压缩弹簧分别位于导料板的下方以及出料口的两侧。
优选的,所述引料板的内部安装有四组引料管,且引料管的尾端与传送口一一对应。
优选的,该装置的公布步骤如下:
S1、使用本装置进行相应的果蔬采摘工作时,通过将装置移动至指定采摘点后,启动液压升降杆,将延伸杆抬升至采摘高度后,旋转延伸杆,从而带动横杆发生水平面的偏移,使得横杆底部的剪切采摘箱靠近待采摘的果蔬附近,随后启动微型负压风机,利用其产生的负压风力通过输气管将果蔬表面附近的气体通过吸气漏斗吸收,并将该气体送进反应瓶的内部,鉴于果蔬成熟后回释放烯烃类气体,且烯烃类物质具有一定的还原性,而反应瓶内部存放的高锰酸钾溶液具有较强的氧化性,因此二者会在反应瓶内部发生氧化还原反应进而使得紫色的高锰酸钾溶液褪色,从而辅助判断果蔬否成熟,实现目标识别的目的,避免采摘了尚未成熟正在发育的果蔬;
S2、之后通过透视窗观察到反应瓶内部溶液褪色得到果蔬成熟肯定的答案后,启动控制按钮,使得电磁继电器通电后形成人为制造的磁铁,具有一定的磁引力作用,而磁铁环表面磁极发出的磁感线的方向与与电磁继电器通电后磁感线的方向镜像分布,因此二者相斥,因而两组剪刀刀柄之间相互靠近,随之通过靠近的剪刀刀柄表面的刀片对果蔬的柄梗部位进行剪切隔断操作,完成果蔬的采摘操作;
S3、完成采摘后,果蔬通过接料盒实现短暂的储存,随后转动延伸杆,使得接料盒转动至传送筛选管的正上方后通过出料口落进传送筛选管的内部,之后通三层直径依次减小的筛选盘后,可将较大尺寸的果蔬通过引料管传送进一号收集抽屉内,将尺寸相对次之的果蔬通过引料管传送至二号收集抽屉内部,将尺寸最小的果蔬通过引料管传送至三号收集抽屉内部,实现采摘后的初步筛选,减少后期筛选的工作量;
S4、不同尺寸的果蔬进入相应的收集抽屉内部后落在承接板的表面,通过U型限位框的引导和分隔作用,可使得进入限位框内部的果蔬能够分列、独立排放保存,既能够避免转运过程中的相互碰撞,保护果蔬表皮完整性,也可实现果蔬的有序摆放,便于后续的拿取包装,待承接板表面果蔬承接满后,将拉绳拽起并将承接板抽离收集抽屉的内部,以便将空置的承接板重新放置进去,进行下一轮的承接摆放工作
与现有技术相比,本发明的有益效果是:
1、本发明通过安装有果蔬识别室,当需要对待采摘的果蔬进行目标判断时,将吸气漏斗对准果蔬的表面,随后启动微型负压风机,利用其产生的负压风力可将果蔬表面的气体抽取至输气管内部,并通过传送软管分流至反应瓶的内部,滤板则可将空气中的固体杂质以及其他异物进行拦截处理,避免管道的堵塞,由于传送软管的尾端端口位置靠下,抽取得到的气体会在反应瓶内部自下而上运动,因此具有较为充足的反应时间,得到的检测结果也会相对准确,鉴于空气中的成分主要为氧气、二氧化碳等不具备还原性的气体,而果蔬成熟后会向外释放具有还原性的烯烃类气体,因此当抽取来的气体中含有烯烃类气体时,会与反应瓶内具有强氧化性的高锰酸钾溶液发生氧化还原反应并使其从紫色的溶液褪色成无色的溶液,因此通过观察反应瓶内部溶液颜色的变化即可判断待采摘的果蔬是否成熟,以免将未成熟和尚在生长发育的果蔬采摘,造成采摘失误,之后反应瓶内部的其他气体以及氧化还原反应过程中生成的二氧化碳气体会通过单向输气管转移至反应瓶的外部,避免反应瓶内部气体填充过度造成瓶体的炸裂,其中高锰酸钾溶液的成本较低且通过颜色褪色与否即可实现目标识别判断,装置的使用成本和识别准确度得到了保证,方便推广使用。
2、本发明通过安装有筛选箱,将采摘后的果蔬送进传送筛选管内后,果蔬在重力作用下沿着传送筛选管运动,依次通过三层直径依次减小的筛选盘,可将较大尺寸的果蔬通过引料管传送进一号收集抽屉内,将尺寸相对次之的果蔬通过引料管传送至二号收集抽屉内部,将尺寸最小的果蔬通过引料管传送至三号收集抽屉内部,实现采摘后的初步筛选,减少后期筛选的工作量,在此过程中,筛选盘内筛选孔中的弹性塑料条在容纳尺寸较小的果蔬通过后,会迅速弹起,对后续的果蔬提供柔性依托作用的同时阻止果蔬表面的附着枝叶进入下一层筛选空间内部,从而实现了果蔬表面初步清洁的作用,通过三组收集抽屉辅助装置进行相应的分类收集后,方便工作人员针对性的进行加工处理,进而提高果蔬的经济价值。
3、本发明通过安装有承接板,通过U型限位框的引导和分隔作用,可使得进入限位框内部的果蔬能够分列、独立排放保存,待承接板表面的果蔬承接满后,将拉绳拽起并将承接板抽离收集抽屉的内部,以便将空置的承接板重新放置进去,进行下一轮的承接摆放工作,方便了装置的使用。
附图说明
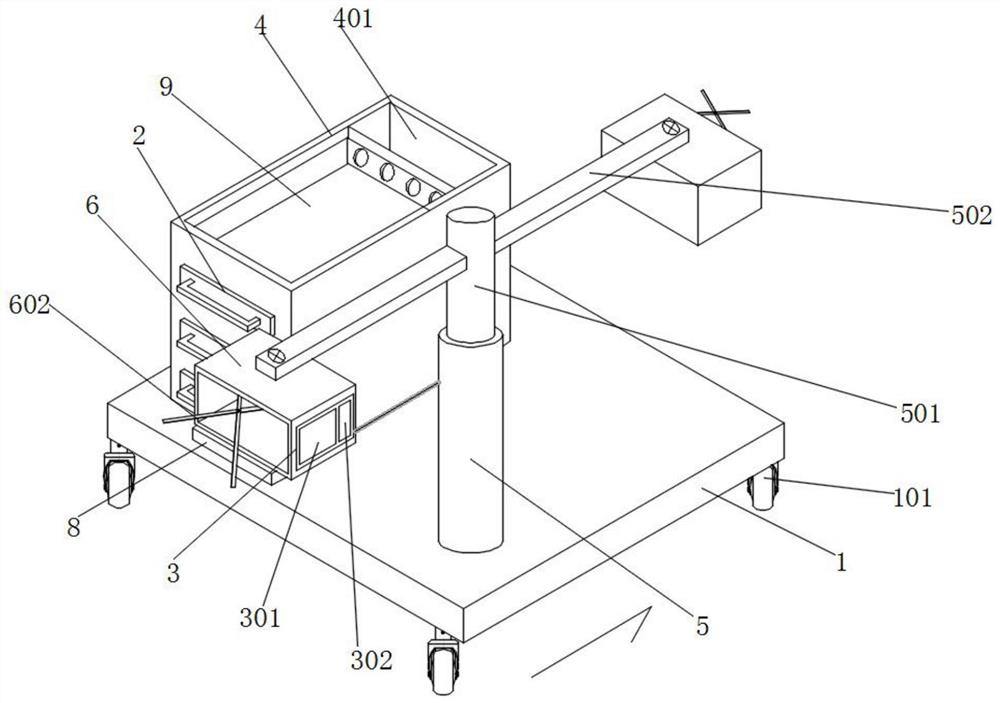
图1为本发明的整体结构示意图;
图2为本发明的一号收集抽屉结构示意图;
图3为本发明的筛选箱剖面结构示意图;
图4为本发明的一号筛选盘、二号筛选盘和三号筛选盘结构示意图;
图5为本发明的剪切采摘箱剖面结构示意图;
图6为本发明的剪切采摘箱俯视结构示意图;
图7为本发明的结构承接板示意图;
图8为本发明的引料板剖面结构示意图。
图中:1、移动底座;101、移动轮;2、把手;3、控制板;301、透视窗;302、控制按钮;4、筛选箱;401、传送筛选管;402、一号筛选盘;403、二号筛选盘;404、三号筛选盘;405、一号收集抽屉;406、二号收集抽屉;407、三号收集抽屉;5、液压升降杆;501、延伸杆;502、横杆;6、剪切采摘箱;601、电磁继电器;602、剪刀刀柄;603、刀片;604、连接弹簧;605、磁铁环;7、果蔬识别室;701、微型负压风机;702、输气管;703、传送软管;704、吸气漏斗;705、滤板;706、反应瓶;707、单向输气管;8、接料盒;801、进料口;802、压缩弹簧;803、导料板;804、出料口;9、承接板;901、限位框;902、拉绳;10、传送口;11、引料板;1101、引料管。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-图8,本发明提供的一种实施例:一种果蔬采摘机器人用目标识别系统,包括移动底座1、筛选箱4、果蔬识别室7、接料盒8和承接板9,移动底座1的顶部安装有筛选箱4,移动底座1通过移动可辅助装置实现不同采摘点的转移,扩大采摘范围,筛选箱4可对剪切后的果蔬进行分类筛选并实现分类收集,方便工作人员针对性的进行加工处理,进而提高果蔬的经济价值,移动底座1的顶部焊接有液压升降杆5,且液压升降杆5位于筛选箱4的一侧,液压升降杆5的顶部滑动安装有延伸杆501,通过液压升降杆5的升降变化带动延伸杆501进行采摘高度的调整,方便装置进行相应的采摘操作,延伸杆501的表面对称安装有两组横杆502,可为剪切采摘箱6的安装提供支撑作用,横杆502远离延伸杆501的一端通过贯穿的螺栓安装有剪切采摘箱6,可通过内部电磁继电器601的通电与断电来实现刀片603的靠拢与远离,进而实现对果蔬的切割处理,剪切采摘箱6的一侧表面安装有控制板3,可使得装置的操作控制更加便捷简单,剪切采摘箱6的内部安装有果蔬识别室7,且果蔬识别室7的底部设有延伸至剪切采摘箱6外部的出气管,通过对果蔬周围空气中是否存在烯烃类气体来判断识别果蔬是否成熟,避免采摘错误,造成果蔬的浪费,剪切采摘箱6的底部通过贯穿的螺栓安装有接料盒8,且接料盒8的正面凸出剪切采摘箱6的正面,可将剪切后的果蔬短暂储存,避免单次剪切后就将果蔬转移输送,减少剪切时间的浪费,提高了剪切效率,筛选箱4的内部安装有传送筛选管401,通过内部设置的三组筛选孔径依次减小的筛选盘,可对剪切后的果蔬按照尺寸进行分类筛选,从而减少了后续工人的筛选操作,缩短了果蔬加工的工序,进而提高了果蔬加工的效率,传送筛选管401的表面连接有三组引料板11,且引料板11的一端延伸进传送筛选管401的内部,可将经过筛选盘筛选拦截后的果蔬转移输送至相对应的收集抽屉内部,方便果蔬的分类收集,筛选箱4的内壁安装有三组上下布置的隔板,可为一号收集抽屉405、二号收集抽屉406和三号收集抽屉407的安装提供支撑作用,三组隔板的顶部表面滑动安装有一号收集抽屉405、二号收集抽屉406和三号收集抽屉407,一号收集抽屉405、二号收集抽屉406和三号收集抽屉407分别用于收集尺寸规格较大、次之和最小的果蔬,从而实现分类收集,避免筛选后的果蔬混合在一起,影响分类销售,一号收集抽屉405、二号收集抽屉406和三号收集抽屉407的正面均安装有把手2,且把手2位于筛选箱4的外部,把手2的设置方便工作人员将一号收集抽屉405、二号收集抽屉406和三号收集抽屉407拉开,并从中取出承接板9及其内部的果蔬,以便放进新的、空置的承接板9进行下一轮的果蔬承接工作,一号收集抽屉405、二号收集抽屉406和三号收集抽屉407的背面均设有四组圆形的传送口10,通过传送口10可将引料管1101内的果蔬贯穿引进一号收集抽屉405、二号收集抽屉406和三号收集抽屉407的内部,以便进行后续的分列保存,一号收集抽屉405、二号收集抽屉406和三号收集抽屉407的内部均放置有承接板9,可对筛选后的果蔬进行分列摆放保存,避免果蔬之间发生碰撞,造成表皮破损,影响果蔬后续的销售和保存。
果蔬识别室7的内部安装有微型负压风机701,果蔬识别室7的正面安装有输气管702,输气管702延伸至剪切采摘箱6的外部,输气管702远离微型负压风机701的一端密封连接有吸气漏斗704,吸气漏斗704固定在剪切采摘箱6的正面,吸气漏斗704位于接料盒8的上方,吸气漏斗704的内壁安装有滤板705,剪切采摘箱6的内部底部安装有反应瓶706,反应瓶706的内部盛放有高锰酸钾溶液,输气管702的底部密封安装有传送软管703,传送软管703的底部延伸至反应瓶706的内部,传送软管703的底部靠近反应瓶706的底壁,反应瓶706的内部安装有单向输气管707,且单向输气管707的内部安装有单向阀,单向输气管707的输入端靠近反应瓶706的顶壁位置,单向输气管707的输出端延伸至剪切采摘箱6的底部,当需要对待采摘的果蔬进行目标判断时,将吸气漏斗704对准果蔬的表面,随后启动微型负压风机701,利用其产生的负压风力可将果蔬表面的气体抽取至输气管702内部,并通过传送软管703分流至反应瓶706的内部,滤板705则可将空气中的固体杂质以及其他异物进行拦截处理,避免管道的堵塞,由于传送软管703的尾端端口位置靠下,抽取得到的气体会在反应瓶706内部自下而上运动,因此具有较为充足的反应时间,得到的检测结果也会相对准确,鉴于空气中的成分主要为氧气、二氧化碳等不具备还原性的气体,而果蔬成熟后会向外释放具有还原性的烯烃类气体,因此当抽取来的气体中含有烯烃类气体时,会与反应瓶706内具有强氧化性的高锰酸钾溶液发生氧化还原反应并使其从紫色的溶液褪色成无色的溶液,因此通过观察反应瓶706内部溶液颜色的变化即可判断待采摘的果蔬是否成熟,以免将未成熟和尚在生长发育的果蔬采摘,造成采摘失误,之后反应瓶706内部的其他气体以及氧化还原反应过程中生成的二氧化碳气体会通过单向输气管707转移至反应瓶706的外部,避免反应瓶706内部气体填充过度造成瓶体的炸裂。
传送筛选管401的内壁安装有一号筛选盘402和二号筛选盘403,二号筛选盘403位于一号筛选盘402的下方,传送筛选管401的内壁安装有三号筛选盘404,三号筛选盘404位于二号筛选盘403的下方,一号筛选盘402、二号筛选盘403和三号筛选盘404的内部均安装有圆形的筛选孔,筛选孔的直径依次减小,筛选孔的内壁安装有弹性塑料条,将采摘后的果蔬送进传送筛选管401内后,果蔬在重力作用下沿着传送筛选管401运动,依次通过三层直径依次减小的筛选盘,可将较大尺寸的果蔬通过引料管1101传送进一号收集抽屉405内,将尺寸相对次之的果蔬通过引料管1101传送至二号收集抽屉406内部,将尺寸最小的果蔬通过引料管1101传送至三号收集抽屉407内部,实现采摘后的初步筛选,减少后期筛选的工作量,在此过程中,筛选盘内筛选孔中的弹性塑料条在容纳尺寸较小的果蔬通过后,会迅速弹起,对后续的果蔬提供柔性依托作用的同时阻止果蔬表面的附着枝叶进入下一层筛选空间内部,从而实现了果蔬表面初步清洁的作用。
承接板9的顶部安装有U型的限位框901,限位框901为海绵制成,承接板9的两侧表面均安装有拉绳902,通过U型限位框901的引导和分隔作用,可使得进入限位框901内部的果蔬能够分列、独立排放保存,待承接板9表面的果蔬承接满后,将拉绳902拽起并将承接板9抽离收集抽屉的内部,以便将空置的承接板9重新放置进去,进行下一轮的承接摆放工作。
剪切采摘箱6的两侧内壁顶部位置均安装有电磁继电器601,剪切采摘箱6的内部安装有两组交叉叠放的剪刀刀柄602,剪刀刀柄602的正面延伸出剪切采摘箱6的内部,剪刀刀柄602位于吸气漏斗704的上方,剪刀刀柄602的表面装有刀片603,剪刀刀柄602的表面安装有连接弹簧604,且连接弹簧604位于刀片603的后方,剪刀刀柄602的表面环绕安装有磁铁环605,且磁铁环605位于连接弹簧604的后方,电磁继电器601通电后形成人为制造的磁铁,具有一定的磁引力作用,可向外释放磁感线,而此时磁铁环605表面磁极发出的磁感线的方向与与电磁继电器601通电后磁感线的方向相同,呈现镜像分布,因此二者相斥,因而两组剪刀刀柄602之间相互靠近,随之通过靠近的剪刀刀柄602表面的刀片603对果蔬的柄梗部位进行剪切隔断操作,完成果蔬的采摘操作,在剪切结束后,对电磁继电器601进行断电处理,使其失去磁引力,进而磁铁环605失去排斥力后会在连接弹簧604的作用下相互远离,进而带动剪刀刀柄602以及表面的刀片603相互远离,以便进行下一轮的剪切操作。
移动底座1的底部四角均安装有移动轮101,可辅助装置进行采摘点的转移,以便实现范围更广的果蔬采摘工作。
控制板3的内部安装有透视窗301和控制按钮302,控制按钮302位于透视窗301的后方,控制按钮302通过导线与液压升降杆5、电磁继电器601、微型负压风机701电性连接,透视窗301的位置与反应瓶706的安装位置对应,通过透视窗301可对反应瓶706内部的溶液颜色进行查看,以判断待采摘的果蔬是否成熟,而控制按钮302的设置,方便工作人员对液压升降杆5、电磁继电器601、微型负压风机701的工作状态进行便捷的操控。
接料盒8的顶部设有进料口801,接料盒8的底部设有出料口804,接料盒8的两侧内壁均安装有轴件,接料盒8的两侧内壁通过轴件均安装有倾斜的导料板803,导料板803为泡沫板制成,接料盒8的内部底壁安装有两组压缩弹簧802,压缩弹簧802分别位于导料板803的下方以及出料口804的两侧,当果蔬被剪切后,会在重力作用力垂直降落,通过进料口801落在导料板803的表面,当导料板803表面的果蔬积累到一定数量时,转动延伸杆501使得接料盒8转动至传送筛选管401的上方,此时果蔬的重量带动导料板803下滑,并对压缩弹簧802进行挤压使其收缩,从而使得两组导料板803之间的开口加大,进而使得导料板803表面的果蔬通过出料口804转移至传送筛选管401的内部,完成后续的筛选操作,而此时导料板803表面的果蔬全部转移处接料盒8内部后,导料板803会在压缩弹簧802的复位作用下上升,重新进行果蔬导料操作。
引料板11的内部安装有四组引料管1101,且引料管1101的尾端与传送口10一一对应,通过引料管1101,可将经过传送筛选管401筛选后的果蔬分流转移至承接板9的表面,既加速了果蔬的传递效率,也可避免果蔬传送过程中发生的相互碰撞,保护果蔬表面。
该装置的公布步骤如下:
S1、使用本装置进行相应的果蔬采摘工作时,通过将装置移动至指定采摘点后,启动液压升降杆5,将延伸杆501抬升至采摘高度后,旋转延伸杆501,从而带动横杆502发生水平面的偏移,使得横杆502底部的剪切采摘箱6靠近待采摘的果蔬附近,随后启动微型负压风机701,利用其产生的负压风力通过输气管702将果蔬表面附近的气体通过吸气漏斗704吸收,并将该气体送进反应瓶706的内部,鉴于果蔬成熟后回释放烯烃类气体,且烯烃类物质具有一定的还原性,而反应瓶706内部存放的高锰酸钾溶液具有较强的氧化性,因此二者会在反应瓶706内部发生氧化还原反应进而使得紫色的高锰酸钾溶液褪色,从而辅助判断果蔬否成熟,实现目标识别的目的,避免采摘了尚未成熟正在发育的果蔬;
S2、之后通过透视窗301观察到反应瓶706内部溶液褪色得到果蔬成熟肯定的答案后,启动控制按钮302,使得电磁继电器601通电后形成人为制造的磁铁,具有一定的磁引力作用,而磁铁环605表面磁极发出的磁感线的方向与与电磁继电器601通电后磁感线的方向镜像分布,因此二者相斥,因而两组剪刀刀柄602之间相互靠近,随之通过靠近的剪刀刀柄602表面的刀片603对果蔬的柄梗部位进行剪切隔断操作,完成果蔬的采摘操作;
S3、完成采摘后,果蔬通过接料盒8实现短暂的储存,随后转动延伸杆501,使得接料盒8转动至传送筛选管401的正上方后通过出料口804落进传送筛选管401的内部,之后通三层直径依次减小的筛选盘后,可将较大尺寸的果蔬通过引料管1101传送进一号收集抽屉405内,将尺寸相对次之的果蔬通过引料管1101传送至二号收集抽屉406内部,将尺寸最小的果蔬通过引料管1101传送至三号收集抽屉407内部,实现采摘后的初步筛选,减少后期筛选的工作量;
S4、不同尺寸的果蔬进入相应的收集抽屉内部后落在承接板9的表面,通过U型限位框901的引导和分隔作用,可使得进入限位框901内部的果蔬能够分列、独立排放保存,既能够避免转运过程中的相互碰撞,保护果蔬表皮完整性,也可实现果蔬的有序摆放,便于后续的拿取包装,待承接板9表面果蔬承接满后,将拉绳902拽起并将承接板9抽离收集抽屉的内部,以便将空置的承接板9重新放置进去,进行下一轮的承接摆放工作。
工作原理:使用本装置进行相应的果蔬采摘工作时,通过将装置移动至指定采摘点后,启动液压升降杆5,将延伸杆501抬升至采摘高度后,旋转延伸杆501,从而带动横杆502发生水平面的偏移,使得横杆502底部的剪切采摘箱6靠近待采摘的果蔬附近,将吸气漏斗704靠近待采摘的果蔬附近,随后启动微型负压风机701,利用其产生的负压风力通过输气管702将果蔬表面附近的气体通过吸气漏斗704吸收,并将该气体送进反应瓶706的内部,通过观察反应瓶706内部紫色的高锰酸钾溶液是否褪色,从而辅助判断果蔬否成熟,实现目标识别的目的,在得到肯定答案后启动控制按钮302,使得电磁继电器601通电后具有一定的磁引力作用,借助电磁继电器601与磁铁环605相互排斥的磁力作用,两组剪刀刀柄602和刀片603之间相互靠近,完成采摘后,落入接料盒8实现短暂的储存,随后转动延伸杆501,使得接料盒8转动至传送筛选管401的正上方后通过出料口804落进传送筛选管401的内部,之后通三层直径依次减小的筛选盘后,可将较大尺寸的果蔬通过引料管1101传送进一号收集抽屉405内,将尺寸相对次之的果蔬通过引料管1101传送至二号收集抽屉406内部,将尺寸最小的果蔬通过引料管1101传送至三号收集抽屉407内部,当不同尺寸的果蔬进入相应的收集抽屉内部后落在承接板9的表面,通过U型限位框901的引导和分隔作用,可使得进入限位框901内部的果蔬能够分列、独立排放保存,待承接板9表面果蔬承接满后,将拉绳902拽起并将承接板9抽离收集抽屉的内部,以便将空置的承接板9重新放置进去,进行下一轮的承接摆放工作。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的具体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
- 一种果蔬采摘机器人用目标识别系统
- 适应光照度突变的采摘机器人目标自主识别系统及其方法