飞行器的自稳云台及其云台姿态反馈系统
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及飞行器技术领域,特别涉及一种飞行器的自稳云台及其云台姿态反馈系统。
背景技术
目前,旋翼飞行器已经被广泛的运用在电力行业、警用军用行业、公共安全行业、新闻媒体行业以及气象森林防火防灾行业等众多行业,具有目标识别、定位和跟踪的协同运动技术的旋翼飞行器,凭借着其突出的技术优势,始终占据着广阔的应用市场。
时下飞行器在飞行过程中,设置在飞行器上的云台需要适应飞行器的各种姿态变化,从而保证搭载在该云台上的摄像机能够时刻与其拍摄追踪的目标物保持相对稳定状态。如此,如何保证搭载在云台上的摄像机的姿态稳定,来达到所拍摄的目标物图像清晰、画面稳定的目的,也始终是飞行器技术研究中的一个尤为重要的组成部分。
发明内容
本发明的主要目的是提出一种飞行器的自稳云台及其云台姿态反馈系统,旨在基于飞行器上云台的稳定来保证搭载在云台上的摄像机的姿态稳定,从而达到所拍摄的目标物图像清晰、画面稳定的目的。
为实现上述目的,本发明提出一种飞行器的自稳云台,所述自稳云台包括安装在飞行器机身上的底座,所述自稳云台包括:
主控芯片,所述主控芯片与所述飞行器的飞行姿态监控系统连接;
伺服驱动装置,所述伺服驱动装置与所述主控芯片连接;
云台姿态反馈系统,所述云台姿态反馈系统与所述主控芯片和/或者所述伺服驱动装置连接;
所述主控芯片、所述伺服驱动装置和所述云台姿态反馈系统设置在所述底座上。
在一实施例中,所述云台姿态反馈系统包括:
目标物位置预测装置、云台旋转速度控制器和云台旋转位置控制器,所述伺服驱动装置分别与所述目标物位置预测装置、所述云台旋转速度控制器和所述云台旋转位置控制器电性连接。
在一实施例中,所述目标物位置预测装置为卡尔曼滤波器。
在一实施例中,所述飞行器的自稳云台为三轴云台,所述飞行器的自稳云台还包括:
X轴角度调整装置、Y轴角度调整装置以及Z轴角度调整装置,所述伺服驱动装置分别与所述X轴角度调整装置、所述Y轴角度调整装置以及所述Z轴角度调整装置电性连接。
在一实施例中,所述伺服驱动装置控制所述X轴角度调整装置转动第一预设角度范围、并控制所述Y轴角度调整装置转动第二预设角度范围,以及控制所述Z轴角度调整装置转动第三预设角度范围。
在一实施例中,所述第一预设角度范围大于等于0度且小于180度,所述第二预设角度范围与所述第一预设角度范围相同,所述第三预设角度范围大于等于0度且小于360度。
在一实施例中,所述飞行姿态监控系统包括:角速度传感器、加速度传感器以及地磁采集装置。
此外,为实现上述目的,本发明还提出一种如上所述自稳云台的云台姿态反馈系统,所述云台姿态反馈系统设置在所述自稳云台的底座上,且所述云台姿态反馈系统与所述自稳云台的主控芯片和/或者伺服驱动装置连接。
在一实施例中,所述云台姿态反馈系统包括:
目标物位置预测装置、云台旋转速度控制器和云台旋转位置控制器,所述目标物位置预测装置、所述云台旋转速度控制器和所述云台旋转位置控制器分别与所述自稳云台的伺服驱动装置电性连接。
在一实施例中,所述目标物位置预测装置为卡尔曼滤波器。
本发明技术方案通过提出一种飞行器的自稳云台及其云台姿态反馈系统,该飞行器的自稳云台包括安装在飞行器机身上的底座,通过在该飞行器的自稳云台中设置主控芯片,所述主控芯片与所述飞行器的飞行姿态监控系统连接;伺服驱动装置,所述伺服驱动装置与所述主控芯片连接;云台姿态反馈系统,所述云台姿态反馈系统与所述主控芯片和/或者所述伺服驱动装置连接;所述主控芯片、所述伺服驱动装置和所述云台姿态反馈系统设置在所述底座上。
本发明基于自稳云台的主控芯片接收所连接飞行器的飞行姿态监控系统采集到的飞行姿态数据,并针对该飞行姿态数据进行处理得到云台控制信息,并将该云台控制信息输出给所连接的伺服驱动装置,该伺服驱动装置将接收到的云台控制信息转换成为电机组能够执行的驱动信号,以控制该自稳云台形成与飞行器之间的随动系统,此外,在自稳云台的随动过程中,还基于云台姿态反馈系统采集该自稳云台的姿态数据,并将该姿态数据反馈给主控芯片,从而由主控芯片精确稳定的调节自稳云台的随动,使得搭载在该自稳云台上的摄像机与其追踪拍摄到的目标物体达到相对稳定的状态。
本发明实现了以飞行器的飞行姿态数据控制云台与飞行器之间形成随动,并基于云台随动过程中的姿态数据更加精确稳定的针对云台的随动进行调节,以此维持云台自我稳定,进而保证了搭载在云台上的摄像机的姿态稳定,从而达到了摄像机所拍摄的目标物图像清晰、画面稳定的目的。
附图说明
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
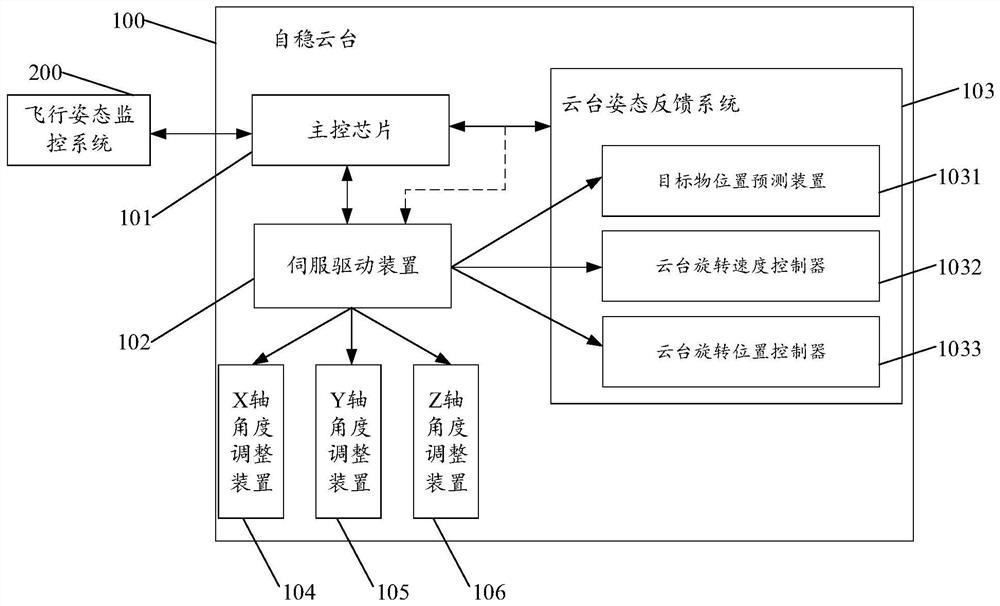
图1为本发明飞行器的自稳云台一实施例的结构示意图;
图2为本发明飞行器的自稳云台一实施例中的应用场景示意图。
附图标号说明:
本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
需要说明的是,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。
本发明提出一种飞行器的自稳云台100,所述自稳云台100包括安装在飞行器机身上的底座。
在本发明一实施例中,请参照如图1所示飞行器的自稳云台100的结构和如图2所示自稳云台100的应用场景,所述飞行器的自稳云台100包括:
主控芯片101,所述主控芯片101与所述飞行器的飞行姿态监控系统200连接;
伺服驱动装置102,所述伺服驱动装置102与所述主控芯片101连接;
云台姿态反馈系统103,所述云台姿态反馈系统103与所述主控芯片101和/或者所述伺服驱动装置102连接;
所述主控芯片101、所述伺服驱动装置102和所述云台姿态反馈系统103设置在所述底座上。
在本实施例中,基于自稳云台100的主控芯片101接收所连接飞行器的飞行姿态监控系统200采集到的飞行姿态数据,并针对该飞行姿态数据进行处理得到云台控制信息,并将该云台控制信息输出给所连接的伺服驱动装置102,该伺服驱动装置102将接收到的云台控制信息转换成为电机组能够执行的驱动信号,以控制该自稳云台100形成与飞行器之间的随动系统,此外,在自稳云台100的随动过程中,还基于云台姿态反馈系统103采集该自稳云台100的姿态数据,并将该姿态数据反馈给主控芯片101,从而由主控芯片101精确稳定的调节自稳云台100的随动,使得搭载在该自稳云台100上的摄像机与其追踪拍摄到的目标物体达到相对稳定的状态。
进一步地,在一种可行的实施例中,所述云台姿态反馈系统103包括:
目标物位置预测装置1031、云台旋转速度控制器1032和云台旋转位置1033控制器,所述伺服驱动装置102分别与所述目标物位置预测装置1031、所述云台旋转速度控制器1032和所述云台旋转位置控制器1033电性连接。
进一步地,在一种可行的实施例中,所述目标物位置预测装置1031为卡尔曼滤波器。
在本实施例中,自稳平台100的云台姿态反馈系统103采用融合均值向量算法(基于特征跟踪偏移)和卡尔曼滤波(基于先验预估)的方法,来实时精确地跟踪搭载在自稳云台上的摄像机所拍摄图像中的目标物。云台姿态反馈系统103先基于目标物位置预测装置1031—卡尔曼滤波器在当前时刻预测出的该处于运动状态的目标物,在下一时刻最有可能出现的位置,并计算出该目标物在图像中的脱靶量(运动的目标物在摄像机所拍摄图像中的位置坐标与该图像的中心位置坐标在水平方向和垂直方向上的偏差),然后,云台姿态反馈系统103将该目标物在下一时刻最有可能出现的位置以及该脱靶量直接反馈给伺服驱动装置102,从而由该伺服驱动装置102来控制驱动自稳云台进行旋转。
进一步地,在另一种可行的实施例中,云台姿态反馈系统103在基于目标物位置预测装置1031—卡尔曼滤波器在当前时刻预测出的该处于运动状态的目标物,在下一时刻最有可能出现的位置,并计算出该目标物在图像中的脱靶量之后,还可以基于与主控芯片101之间的连接,将该目标物在下一时刻最有可能出现的位置以及该脱靶量先反馈主控芯片101,由主控芯片101进行处理后传递控制信息给伺服驱动装置102,进而再由该伺服驱动装置102来控制驱动自稳云台进行旋转。
此外,在本实施例中,自稳平台100还可以根据伺服驱动装置102控制驱动自稳云台100进行旋转的过程中,该伺服驱动装置102控制自稳平台100旋转的速度回路的开环剪切频率和相位裕度,设计水平方向、俯仰方向的云台旋转速度控制器1032,如此,可令自稳云台100在伺服驱动装置102的控制下进行旋转时,基于该云台旋转速度控制器1032实时消除目标物与摄像机光轴之间在水平和俯仰方向上的偏差。
此外,在本实施例中,自稳平台100还可以根据伺服驱动装置102控制驱动自稳云台100进行旋转的过程中,该伺服驱动装置102控制自稳平台100旋转的位置回路的开环剪切频率和相位裕度,设计位置超前、滞后的云台旋转位置控制器1033,如此,可令自稳云台100在伺服驱动装置102的控制下进行旋转时,基于该云台旋转位置控制器1033使运动目标始终保持在摄像机光轴位置或离摄像机视野中心较近的区域。
进一步地,在一种可行的实施例中,所述飞行器的自稳云台100为三轴云台,所述飞行器的自稳云台100还包括:
X轴角度调整装置104、Y轴角度调整装置105以及Z轴角度调整装置106,所述伺服驱动装置102分别与所述X轴角度调整装置104、所述Y轴角度调整装置104以及所述Z轴角度调整装置105电性连接。
在本实施例中,自稳云台100的X轴角度调整装置104、Y轴角度调整装置105以及Z轴角度调整装置106具体可以为空心杯电机。主控芯片101针对飞行器的的飞行姿态数据进行处理得到的云台控制信息包括自稳云台100底座的X轴、Y轴以及Z轴的调整角度。
在本实施例中,主控芯片101在接收到飞行器的的飞行姿态监控系统200采集到的飞行姿态数据之后,主控芯片101针对该飞行姿态数据进行处理从而得到自稳云台100的底座上,X轴、Y轴以及Z轴各自的调整角度,然后,主控芯片101将该X轴、Y轴以及Z轴各自的调整角度下发给伺服驱动装置102,伺服驱动装置102即分别按照该X轴、Y轴以及Z轴各自的调整角度,对应控制所连接的X轴角度调整装置104、Y轴角度调整装置105以及Z轴角度调整装置106,各自调整底座X轴、Y轴以及Z轴相应的角度。
进一步地,在一种可行的实施例中,所述伺服驱动装置102控制所述X轴角度调整装置104转动第一预设角度范围、并控制所述Y轴角度调整装置105转动第二预设角度范围,以及控制所述Z轴角度调整装置106转动第三预设角度范围。
进一步地,在一种可行的实施例中,所述第一预设角度范围大于等于0度且小于180度,所述第二预设角度范围与所述第一预设角度范围相同,所述第三预设角度范围大于等于0度且小于360度。
在本实施例中,伺服驱动装置102在根据主控芯片101下发的底座上X轴、Y轴以及Z轴各自的调整角度,对应控制X轴角度调整装置104、Y轴角度调整装置105以及Z轴角度调整装置106,各自调整底座X轴、Y轴以及Z轴相应角度的过程中,该伺服驱动装置102具体可以控制X轴角度调整装置104调整底座上X轴的角度调整范围为0至180度(不包含180度)、且该伺服驱动装置102具体可以控制Y轴角度调整装置105调整底座上Y轴的角度调整范围也为0至180度(不包含180度),以及,该伺服驱动装置102具体可以控制Z轴角度调整装置106调整底座上Z轴的角度调整范围为0至360度(不包含360度)。
进一步地,在一种可行的实施例中,所述飞行姿态监控系统200包括:角速度传感器201、加速度传感器202以及地磁采集装置203。
在本实施例中,飞行器的飞行姿态数据包括但不限于:角速度、加速度以及地磁数据。飞行器的飞行姿态监控系统200在飞行器的整个飞行过程中,均针对飞行器的飞行姿态进行监控,即,利用角速度传感器201采集角速度、利用加速度传感器202采集加速度,以及,利用地磁采集装置采集地磁数据。
进一步地,在本实施例中,主控芯片101在接收所连接飞行器的飞行姿态监控系统200采集到的飞行姿态数据之后,通过针对该飞行姿态数据进行校正处理、积分处理以及装换处理来得到云台控制信息。
本发明技术方案通过提出一种飞行器的自稳云台,基于自稳云台的主控芯片接收所连接飞行器的飞行姿态监控系统采集到的飞行姿态数据,并针对该飞行姿态数据进行处理得到云台控制信息,并将该云台控制信息输出给所连接的伺服驱动装置,该伺服驱动装置将接收到的云台控制信息转换成为电机组能够执行的驱动信号,以控制该自稳云台形成与飞行器之间的随动系统,此外,在自稳云台的随动过程中,还基于云台姿态反馈系统采集该自稳云台的姿态数据,并将该姿态数据反馈给主控芯片,从而由主控芯片精确稳定的调节自稳云台的随动,使得搭载在该自稳云台上的摄像机与其追踪拍摄到的目标物体达到相对稳定的状态。
本发明实现了以飞行器的飞行姿态数据控制云台与飞行器之间形成随动,并基于云台随动过程中的姿态数据更加精确稳定的针对云台的随动进行调节,以此维持云台自我稳定,进而保证了搭载在云台上的摄像机的姿态稳定,从而达到了摄像机所拍摄的目标物图像清晰、画面稳定的目的。
进一步地,本发明还提供一种应用于上述飞行器的自稳云台中的云台姿态反馈系统,请参照如图1所示飞行器的自稳云台100的结构,所述云台姿态反馈系统103设置在所述自稳云台100的底座上,且所述云台姿态反馈系统103与所述自稳云台100的主控芯片101连接。
在本实施例中,自稳云台100在与飞行器之间的随动过程中,基于云台姿态反馈系统103采集该自稳云台100的姿态数据,并将该姿态数据反馈给主控芯片101,从而由主控芯片101精确稳定的调节自稳云台100的随动,使得搭载在该自稳云台100上的摄像机与其追踪拍摄到的目标物体达到相对稳定的状态。
进一步地,在一种可行的实施例中,所述云台姿态反馈系统103包括:
目标物位置预测装置1031、云台旋转速度控制器1032和云台旋转位置1033控制器,所述伺服驱动装置102分别与所述目标物位置预测装置1031、所述云台旋转速度控制器1032和所述云台旋转位置控制器1033电性连接。
进一步地,在一种可行的实施例中,所述目标物位置预测装置1031为卡尔曼滤波器。
在本实施例中,自稳平台100的云台姿态反馈系统103采用融合均值向量算法(基于特征跟踪偏移)和卡尔曼滤波(基于先验预估)的方法,来实时精确地跟踪搭载在自稳云台上的摄像机所拍摄图像中的目标物。云台姿态反馈系统103先基于目标物位置预测装置1031—卡尔曼滤波器在当前时刻预测出的该处于运动状态的目标物,在下一时刻最有可能出现的位置,并计算出该目标物在图像中的脱靶量(运动的目标物在摄像机所拍摄图像中的位置坐标与该图像的中心位置坐标在水平方向和垂直方向上的偏差),然后,云台姿态反馈系统103将该目标物在下一时刻最有可能出现的位置以及该脱靶量直接反馈给伺服驱动装置102,从而由该伺服驱动装置102来控制驱动自稳云台进行旋转。
进一步地,在另一种可行的实施例中,云台姿态反馈系统103在基于目标物位置预测装置1031—卡尔曼滤波器在当前时刻预测出的该处于运动状态的目标物,在下一时刻最有可能出现的位置,并计算出该目标物在图像中的脱靶量之后,还可以基于与主控芯片101之间的连接,将该目标物在下一时刻最有可能出现的位置以及该脱靶量先反馈主控芯片101,由主控芯片101进行处理后传递控制信息给伺服驱动装置102,进而再由该伺服驱动装置102来控制驱动自稳云台进行旋转。
本发明实现了,在自稳云台以飞行器的飞行姿态数据控制形成与飞行器之间的随动过程中,基于云台随动过程中的姿态数据更加精确稳定的针对云台的随动进行调节,以此维持云台自我稳定,进而保证了搭载在云台上的摄像机的姿态稳定,从而达到了摄像机所拍摄的目标物图像清晰、画面稳定的目的。
需要说明的是,以上所述仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是在本发明的发明构思下,利用本发明说明书及附图内容所作的等效结构变换,或直接/间接运用在其他相关的技术领域均包括在本发明的专利保护范围内。
- 飞行器的自稳云台及其云台姿态反馈系统
- 增稳云台及其控制方法和携带所述增稳云台的无人飞行器