一种适用于抓手定位机构
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及汽车白车身焊接技术领域,具体而言,涉及一种适用于抓手定位机构。
背景技术
汽车白车身焊接过程中,与其产品直接接触的夹具设计极其重要。夹具设计的优劣是评价一台设备优劣的重要指标。
夹具的产品定位是在静态下完成定位销定位,而机器人抓手取放产品进行焊接时,机器人抓手一直处于运动状态。机器人抓手与产品之间存在位置偏差,从而影响机器人抓手的取放件的准确度,且抓手和夹具之间的误差容易对产品造成损坏,影响焊件的效率和质量,增加生产成本。
鉴于此,本公司设计了一种适用于抓手定位机构,以解决此问题。
发明内容
本发明针对现有技术的缺点,提供了一种适用于抓手定位机构,解决了上述技术的缺陷。
为了实现上述目的,本发明采用了如下技术方案:
一种适用于抓手定位机构,与夹具和机器人抓手相对应,其特征在于:包括设置在夹具上的下连接件和设置在机器人抓手上的上连接件;所述上连接件的下端面上固定安装有定位销;所述下连接件的上端面上安装有竖向的套筒,定位销插接到套筒内。
优化的方案,所述下连接件包括通过螺栓安装在夹具上的下底板,下底板上安装有下底座,下底座上安装有竖向套筒。
优化的方案,所述上连接件包括贯穿机器人抓手的上连接座,上连接座的下端安装有安装座,安装座上安装有销座,销座的下端固定安装定位销。
优化的方案,所述套筒的上端开口处设置有托板,托板上安装有托架座;所述定位销贯穿托架座和托板,最后进入到套筒内。
优化的方案,所述托架座的一侧设置有椭圆形通孔,椭圆形通孔内安装有螺栓;所述定位销上设置有凹槽,螺栓的内端与凹槽配合实现定位。
由于采用了上述技术,与现有技术相比较,本发明的有益效果是:
本发明利用定位销和套筒实现机器人抓手和夹具之间的快速精准定位,可以消除误差,节约成本,提高生产效率,满足生产质量及节拍的要求。
附图说明
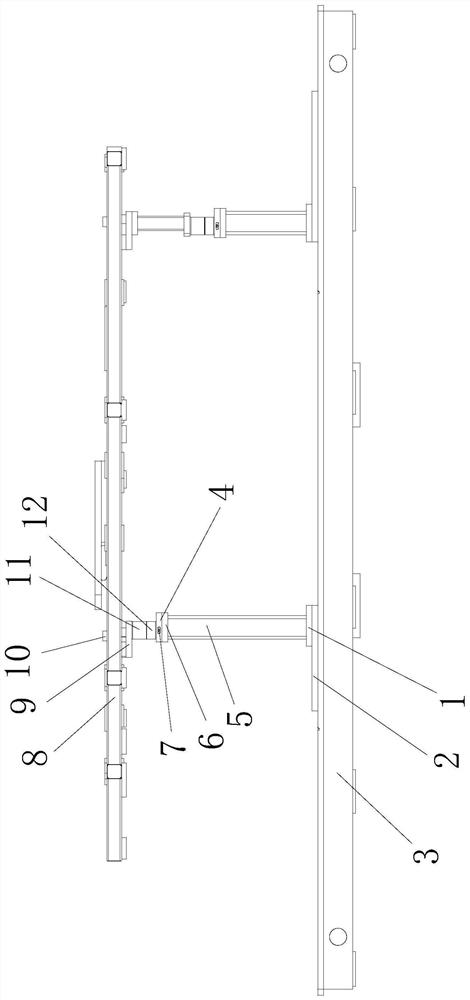
图1为本发明一种实施例的结构示意图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
如图1所示,一种适用于抓手定位机构,与夹具3和机器人抓手8相对应,包括设置在夹具3上的下连接件和设置在机器人抓手上的上连接件。所述下连接件包括通过螺栓安装在夹具上的下底板2,下底板2上安装有下底座1,下底座1上安装有竖向套筒5。所述上连接件包括贯穿机器人抓手的上连接座10,上连接座10的下端安装有安装座9,安装座9上安装有销座11,销座11的下端固定安装定位销12。
所述下连接件的上端面上安装有竖向的套筒,定位12销插接到套筒5内。
所述套筒的上端开口处设置有托板6,托板6上安装有托架座4。所述定位销贯穿托架座和托板,最后进入到套筒内。
所述托架座的一侧设置有椭圆形通孔,椭圆形通孔内安装有螺栓7。所述定位销上设置有凹槽,螺栓的内端与凹槽配合实现定位。
工作的时候,定位销一直滑动在套筒内,且通过螺栓和凹槽实现定位,保证定位销正上正下运动。套筒和定位销也可以保证正上正下运动。
本发明利用定位销和套筒实现机器人抓手和夹具之间的快速精准定位,可以消除误差,节约成本,提高生产效率,满足生产质量及节拍的要求。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种适用于抓手定位机构
- 一种抓手定位装置及构成件定位机构