一种阻滞式拖地机器人
文献发布时间:2023-06-19 11:03:41
技术领域
本发明涉及智能自动拖地机器人技术领域,尤其涉及一种阻滞式拖地机器人。
背景技术
随着科学技术发展以智能家居为代表的智能设备广泛进入寻常百姓家中,拖地机器人作为其中重要的一部分得到了广泛的应用。
拖地机器人主要应用于家居、酒店等室内环境中,其清扫作业主要针对室内环境中的粉尘、皮屑等污染物,其清洁作业能有效降低螨虫、细菌等微生物滋生,从而有效降低室内人员皮肤过敏、哮喘等灰尘致病性疾病的发生。同时自动化小型化拖地机器人的引入,能够有效减小劳动人员工作强度。此外相对于人工清洁,拖地机器人往往具有较小的体积使其能够进入狭窄的床底、桌底等空间内进行清洁,清洁效率更高。
然而现有的拖地机器人仍存在各种缺陷,现有的拖地机器人主要依靠移动机器人底盘底部挂载的带水抹布进行清扫,该种方式清洁效果不佳,清洁程度很大程度上取决于使用前抹布的清洁程度以及抹布清洁时给予地面的擦拭力大小,这两种影响通常随清洁时间增长而恶化。另外,单一的出水方式很容易造成抹布吸水饱和后的污水泄露问题,导致拖机机器人从清洁环境变为污染环境。为此,在这里提出一种能够进行污水回收循环,高擦拭力的自主移动拖地机器人。
发明内容
基于背景技术存在的技术问题,本发明提出一种阻滞式拖地机器人,应用于室内环境下的拖地机器人,旨在更高效的对地面进行拖地清洁,提高清扫工作的自动化程度,减少人工成本。
一种阻滞式拖地机器人,包括壳体和设置在壳体内部的清水箱,所述壳体底面的一侧中间部并排设有两个驱动马达,两个所述驱动马达的输出端固定连接前驱动清洁轮的一端,所述前驱动清洁轮内部为空腔结构,所述前驱动清洁轮的另一端通过清水导管与所述清水箱连通,所述前驱动清洁轮的壳体上设有过水结构,所述壳体底面与所述驱动马达相对的另一侧中间部固定设置后支撑架,所述后支撑架通过无刷电机活动连接阻滞后轮,所述前驱动清洁轮的转动在提供机器人向前的动力的同时完成机器人对地面清洁作业,所述阻滞后轮的转动方向与所述前驱动清洁轮的转动方向相反,用于增大前驱动清洁轮摩擦力。
优选地,所述阻滞后轮的外壳套设有清洁布,所述阻滞后轮的一端通过旋转摆臂活动连接污水回收轮,所述后支撑架上设有旋转电机,所述旋转电机控制所述旋转摆臂水平转动从而实现所述污水回收轮贴紧或远离所述阻滞后轮。地面的水渍被阻滞后轮外壳上的清洁布吸收并随着阻滞后轮转动,因为阻滞后轮上的清洁布需要定时更换,所以污水回收轮必须是可以活动的,以方便更换阻滞后轮上的清洁布。
优选地,所述阻滞后轮和污水回收轮的内部均为空腔结构,所述阻滞后轮靠近所述旋转摆臂的一端设有后轮进水口、远离所述旋转摆臂的一端设有后轮出水口,所述污水回收轮的一端设有回收轮出水孔,所述污水回收轮的壳体上设有进水结构,所述旋转摆臂为中空结构,所述旋转摆臂的一端通过进水软管与所述后轮进水口连通、另一端与所述回收轮出水孔连通。阻滞后轮转动在清洁地面的同时可以回收前驱动清洁轮作业后残留在地面上的水渍。
优选地,所述污水回收轮的进水结构包括回收轮外壳和设置在内部的回收轮内壳,所述回收轮外壳上设有若干外层过水孔,所述外层过水孔内可活动的设有钟型铜帽,所述回收轮内壳上间隔设置若干内层过水孔和弹片,所述弹片与所述外层过水孔的位置相匹配,所述弹片用于支撑所述钟型铜帽,所述回收轮内壳的内部固定设置螺旋送水板。
优选地,所述旋转摆臂包括旋转横臂和旋转竖臂,所述旋转横臂远离所述旋转竖臂的一端设有连接孔,所述旋转横臂的内部设有中空管道,所述旋转竖臂的中间部设有卡台,所述旋转竖臂的顶部设有旋转摆臂齿轮。
阻滞后轮上的清洁布对地面上的水渍被吸收饱和后必然难以继续吸收水渍,所以需要污水回收轮来吸收存储清洁后的污水。调整旋转摆臂使得污水回收轮压紧贴于阻滞后轮上,污水回收轮与旋转摆臂是活动连接的,当阻滞后轮旋转时带动污水回收轮转动。运动过程中污水回收轮挤压阻滞后轮上的清洁布并将挤压出的污水通过污水回收轮上的过水孔吸收进入污水回收轮内的腔体中,污水回收轮的腔体与阻滞后轮的腔体通过旋转摆臂中空管道连接在一起。
优选地,所述阻滞后轮的后轮出水口通过齿轮泵进水管道连接齿轮泵,所述齿轮泵设置于所述壳体内,所述齿轮泵的齿轮泵出水管道与所述清水箱连通。
阻滞后轮能够储存的污水量是一定的,超过阻滞后轮的储水量后拖地机器人将难以继续回收污水,所以需要将回收的污水过滤后重新泵入清水箱进行储存并利用,故在阻滞后轮空腔内设置污水过滤结构,齿轮泵产生负压环境,污水经污水回收轮被吸入阻滞后轮的空腔内,最后经齿轮泵流回至清水箱中从而完成一次清洁与循环。
优选地,所述壳体底面的中间部设有两组刮水组件,用于将所述前驱动清洁轮所渗出的水集中到所述阻滞后轮。
优选地,所述刮水组件包括刮水板,所述刮水板通过刮水板支杆以及刮水板推杆与所述壳体的底部活动连接。
前驱动清洁轮清洁地面后会在地面上残存一些水渍,阻滞后轮负责吸收这部分水渍,但阻滞后轮的行走路径只有前驱动清洁轮的一半宽度,所以需要在前驱动清洁轮和阻滞后轮的中间加装刮水组件,通过刮水板上的橡胶条将水渍刮到阻滞后轮所能吸收的清扫面上。
优选地,所述前驱动清洁轮包括清洁轮外壳和清洁轮内壳,所述清洁轮外壳和清洁轮内壳上均设有过水槽,所述清洁轮外壳和清洁轮内壳之间设有高密度无纺布,所述清洁轮外壳的外部套设有清洁布,所述前驱动清洁轮远离所述驱动马达的一端设有清洁轮进水孔,所述清洁轮进水孔与所述清水导管连通。
优选地,所述壳体上与所述前驱动清洁轮相同的一侧壁上设有充电凸起和可视孔,所述壳体的两个侧壁上均设有侧边测距传感器,所述壳体与所述前驱动清洁轮相同的一侧内壁上设有视觉模块,所述视觉模块通过可视孔探测前方障碍物,所述壳体内还设有主控电脑。
本发明中的有益效果:
本发明提出一种阻滞式拖地机器人,三个拖地滚轮采取三角型分布方式布置,前进方向竖直布置两拖地滚轮用于控制机器人的运动,每个拖地滚轮内置旋转马达,可实现两轮的差速控制。该拖地机器人是通过前驱动清洁轮与阻滞后轮共同控制实现,前驱动清洁轮的转动在提供机器人向前的动力的同时完成机器人对地面清洁作业,阻滞后轮转动方向与机器人的主运动方向相反,其作用为在增大前驱动清洁轮摩擦力的同时清洁地面并回收前驱动清洁轮作业后残留在地面上的水渍。
本发明提出一种阻滞式拖地机器人,该装置中的前驱动清洁轮、污水回收轮的形状均为圆柱型,只用拖地滚轮就实现机器人的运动,无其它滚轮辅助,减少了滚轮污染清洁后地面的可能,清洁后不会留下轮印;通过阻滞后轮增加前进阻力得方法提高清洁布清洁时的擦拭力,能够有效擦出地面顽固污渍。利用拖布滚轮进行地面清洁,清洁过程中清水不断从滚轮内部渗入清洁布,能在清洁时对清洁布上水溶性污渍进行去污操作,提高了拖地清洁布利用效率,减少了清洁布的更换频率。
本发明内置一套污水回收过滤系统,能够有效提高自备清水利用率,延长其工作时间,减少换水频率;该装置充分利用拖地滚轮与污水回收轮内部的空腔体积,将污水过滤,水量控制以及污水收集放置腔内的方式能够有效减小机器人体积,使其能够做的更小,能进入更小的空间进行清扫。
附图说明
附图用来提供对本发明的进一步理解,并且构成说明书的一部分,与本发明的实施例一起用于解释本发明,并不构成对本发明的限制。在附图中:
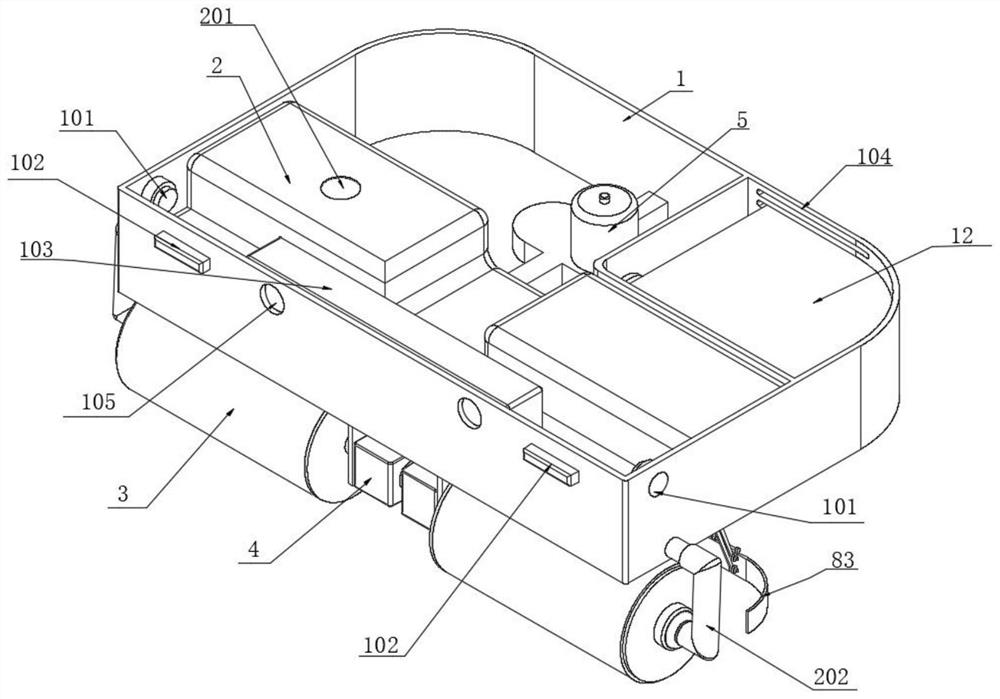
图1为一种阻滞式拖地机器人的整体示意图;
图2为一种阻滞式拖地机器人的侧视图;
图3为前驱动清洁轮的内部结构图;
图4为阻滞后轮的内部结构图;
图5为污水回收轮的内部结构图;
图6为阻滞后轮和污水回收轮的展开结构示意图;
图7为旋转摆臂的结构示意图;
图8为刮水组件的结构示意图;
图9为一种阻滞式拖地机器人的水循环结构图。
图中:1-壳体、101-侧边测距传感器、102-充电凸起、103-视觉模块、104-散热栅栏、105-可视孔、2-清水箱、201-注水口、202-清水导管、3-前驱动清洁轮、301-清洁轮外壳、302-清洁轮内壳、303-过水槽、304-高密度无纺布、305-清洁轮进水孔、4-驱动马达、5-齿轮泵、501-齿轮泵进水管道、502-齿轮泵出水管道、6-阻滞后轮、601-进水软管、602-过滤栏、603-无刷电机、604-后轮出水口、605-后轮进水口、7-污水回收轮、701-回收轮外壳、702-外层过水孔、703-回收轮内壳、704-内层过水孔、705-弹片、706-螺旋送水板、707-回收轮出水孔、708-钟型铜帽、8-刮水组件、81-刮水板推杆、82-刮水板支杆、83-刮水板、8301-外壳耳部、9-旋转电机、901-旋转电机蜗杆、10-旋转摆臂、1001-旋转摆臂齿轮、1002-连接孔、1003-中空管道、1004-旋转横臂、1005-旋转竖臂、1006-卡台、11-后支撑架、1101-固定板、12-主控电脑。
具体实施方式
下面结合具体实施例对本发明作进一步解说。
参照图1-9,一种阻滞式拖地机器人,包括壳体1和设置在壳体1内部的清水箱2,壳体1底面的一侧中间部并排设有两个驱动马达4,驱动马达4通过支架与壳体1固定连接,两个驱动马达4的输出端固定连接前驱动清洁轮3的一端,前驱动清洁轮3内部为空腔结构,前驱动清洁轮3的另一端通过清水导管202与清水箱2连通,清水箱2的顶部开设注水口201,前驱动清洁轮3的壳体上设有过水结构303,壳体1底面与驱动马达4相对的另一侧中间部固定设置后支撑架11,后支撑架11通过无刷电机603活动连接阻滞后轮6,前驱动清洁轮3的转动在提供机器人向前的动力的同时完成机器人对地面清洁作业,阻滞后轮6的转动方向与前驱动清洁轮3的转动方向相反,用于增大前驱动清洁轮3摩擦力。
阻滞后轮6靠近旋转摆臂10的一端设有一无刷电机603,无刷电机603与阻滞后轮6同轴,无刷电机603的线圈部分与后支撑架11固连,线圈部分中心开孔与阻滞后轮6的后轮进水口605相匹配,使进水软管601能够从线圈部分中心开孔中穿过与后轮进水口605连通,在三相电的驱动下,无刷电机603转子部分将带动阻滞后轮6绕其轴线旋转。
前驱动清洁轮3远离驱动马达4的一端设有清洁轮进水孔305,清洁轮进水孔305与清水导管202连通。前驱动清洁轮3包括清洁轮外壳301和清洁轮内壳302,清洁轮外壳301和清洁轮内壳302上均设有过水槽303,清洁轮外壳301和清洁轮内壳302之间设有高密度无纺布304,高密度无纺布304增大清水流出阻力可控制水流的排出速度。清洁轮外壳301的外部套设有清洁布,实现前驱动清洁轮3的清洁功能,该清洁布可用通过拔出清水箱2与前驱动清洁轮3之间的清水导管202后实现其更换清洗。
阻滞后轮6的外壳套设有清洁布,阻滞后轮6的一端通过旋转摆臂10活动连接污水回收轮7;旋转摆臂10包括旋转横臂1004和旋转竖臂1005,旋转横臂1004远离旋转竖臂1005的一端设有连接孔1002,旋转横臂1004的内部设有中空管道1003,旋转竖臂1005的中间部设有卡台1006,旋转竖臂1005的顶部设有旋转摆臂齿轮1001。
旋转摆臂10通过卡台1006固定在后支撑架11上的固定板1101上;固定板1101上还设有旋转电机9,旋转电机9的旋转电机蜗杆901与旋转摆臂10上的旋转摆臂齿轮1001啮合,通过旋转电机9转动带动旋转电机蜗杆901转动,旋转电机蜗杆901驱动旋转摆臂齿轮1001旋转从而带动整个旋转摆臂10水平旋转,进而带动污水回收轮7贴紧或远离阻滞后轮6。
阻滞后轮6和污水回收轮7的内部均为空腔结构,阻滞后轮6靠近旋转摆臂10的一端设有后轮进水口605、远离旋转摆臂10的一端设有后轮出水口604,污水回收轮7的一端设有回收轮出水孔707,污水回收轮7的壳体上设有进水结构,旋转摆臂10为中空结构,旋转摆臂10的一端通过进水软管601与后轮进水口605连通、另一端与回收轮出水孔707连通。污水回收轮7上设有回收轮出水孔707的一端活动连接在旋转摆臂10的连接孔1002处。旋转摆臂10采用特氟龙材质,既保证了连接处的密封性又保证了污水回收轮7相对于连接孔1002转动时的润滑性。
污水回收轮7的进水结构包括回收轮外壳701和设置在内部的回收轮内壳703,回收轮外壳701上设有若干外层过水孔702,外层过水孔702内可活动的设有钟型铜帽708,回收轮内壳703上间隔设置若干内层过水孔704和弹片705,弹片705与外层过水孔702的位置相匹配,弹片705用于支撑钟型铜帽708,回收轮内壳703的内部固定设置螺旋送水板706。
外层过水孔702被直径与孔直径相同的钟型铜帽708密封,钟型铜帽708被污水回收轮7的回收轮内壳703支撑,回收轮内壳703上设置弹片705,弹片705在支撑钟型铜帽708的同时还能给钟型铜帽708提供一定的弹性,在清洁时,污水回收轮7随阻滞后轮6转动,钟型铜帽708未与阻滞后轮6接触时,在弹片705的作用下钟型铜帽708密封住污水回收轮7上的外层过水孔702,在钟型铜帽708旋转至与阻滞后轮6接触面时,钟型铜帽708被挤压缩入污水回收轮7内,此时阻滞后轮6上的清洁布所吸收的污水也被挤压出并被流入污水回收轮7内腔中。随着转动继续,钟型铜帽708脱离接触,外层过水孔702又被密封住。以上结构实现的了污水的回收。
污水进入污水回收轮7内,然后经过内层过水孔704进入到螺旋送水板706位置处,螺旋送水板706随污水回收轮7转动从而推动污水向回收轮出水孔707处流动。回收轮出水孔707与旋转摆臂10的中空管道1003相连通,污水流经中空管道1003、进水软管601流入阻滞后轮6的腔体内。
阻滞后轮6的后轮出水口604通过齿轮泵进水管道501连接齿轮泵5,齿轮泵5设置于壳体1内,齿轮泵5的齿轮泵出水管道501与清水箱2连通。阻滞后轮6内设有过滤栏602,用于将污水过滤后进入清水箱。齿轮泵5产生负压环境,污水经污水回收轮7被吸入阻滞后轮6的空腔内,最后经齿轮泵5流回至清水箱2中完成一次清洁与循环;此外齿轮泵5提供的负压环境也保证了污水回收通路的密封性。
壳体1底面的中间部设有两组刮水组件8,用于将前驱动清洁轮3所渗出的水集中到阻滞后轮6。刮水组件8包括刮水板83,刮水板83通过两根刮水板支杆82以及一根刮水板推杆81与壳体1的底部活动连接。刮水板83为S型,刮水板83底部嵌有橡胶条,刮水板83通过橡胶条与地面接触。刮水板83与壳体1通过刮水板支杆82以及刮水板推杆81连接在一起,刮水板支杆82一端固连在壳体1下表面的外壳耳部8301,另一端固定在刮水板83的耳上,两根刮水板支杆82与外壳耳部8301以及刮水板83耳部构成以可活动的平行四边形结构,该结构能够保证刮水板83立面始终与所述机器人外壳底面相垂直。固定在刮水板83上的刮水板推杆81始终对刮水板82提供一向下的推力,使刮水板83始终与地面保持良好接触。
壳体1上与前驱动清洁轮3相同的一侧壁上设有充电凸起102和可视孔105,壳体1的两个侧壁上均设有侧边测距传感器101,壳体1与前驱动清洁轮3相同的一侧内壁上设有视觉模块103,视觉模块103通过可视孔105探测前方障碍物,壳体1内还设有主控电脑12,主控电脑12的下方设置有蓄电池(图中未示出),壳体1上靠近主控电脑12和蓄电池的侧壁设有散热栅栏104。本发明中充电凸起102、视觉模块103、驱动马达4、无刷电机603、旋转电机9、主控电脑12以及蓄电池之间均电性连接。
本发明提出的拖地机器人利用视觉模块103实现车体的定位与避障,外壳上设有两个充电凸起102,充电凸起102与壳体内部的蓄电池电连接,充电时两充电凸起102分别外部电源正负极相连,用以给所述机器人充电。外壳侧边安装的侧边测距传感器101能够实时采集外壳侧边与侧边障碍物的距离,用于所述机器人的安全防护。
工作原理
本发明提出的拖地机器人的污水循环系统由清水箱2、前驱动清洁轮3、阻滞后轮6、污水回收轮7、旋转摆臂10、齿轮泵5等结构或部件构成。拖地机器人所用清水最开始由注水口201加入清水箱2中储存,清水箱2与前驱动清洁轮3通过清水导管3连接,清水箱2中清水在重力作用下流入前驱动清洁轮3内部;前驱动清洁轮3的壳体上设有过水结构,清水可以渗出至地面。
拖地机器人清洁前,旋转摆臂旋10转将污水回收轮7压紧贴于阻滞后轮6上,阻滞后轮6旋转时带动污水回收轮7转动;运动过程中阻滞后轮6上的清洁布吸收前驱动清洁轮3渗出的水渍,污水回收轮7挤压阻滞后轮6上的清洁布并将挤压出的污水通过污水回收轮7上的过水孔吸收进污水回收轮内6的腔体中,污水回收轮7的腔体与阻滞后轮6的腔体通过旋转摆臂10中的中空管道1003连接在一起。污水经过阻滞后轮6内的过滤机构后通过齿轮泵5进入清水箱,从而完成了一次工作循环。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种阻滞式拖地机器人
- 一种具有自动脱水功能的可拖地式清洁机器人