一种接地刀闸操作机构
文献发布时间:2023-06-19 11:05:16
技术领域
本发明涉及机械结构领域,尤其涉及一种接地刀闸操作机构。
背景技术
倒闸操作是改变电网设备运行状态的一种操作,是电力系统必不可少的一项作业环节。接地刀闸的操作是柜体在备用与检修状态之间切换的关键一步。10kv开关柜接地刀闸的操作存在操作空间小、操作力矩大、柜体机构卡阻机器人难以判断操作到位等难点。同时开关柜接地刀闸操作孔外侧设置有柜体地刀联锁板压,人工操作过程中需双手协同完成压板下压及手动操作杆的插入。
本发明提供了一种可由机器人实现上述接地刀闸操作的操作机构及操作方法。具备单级浮动多自由度被动适应,插入到位判断,视觉辅助定心,扭转容差等功能。
现阶段已公布的发明专利(CN105914634A)手车开关及接地刀闸操作专用工具,通过电动或手动控制方式实现手车开关或接地刀闸的相应操作,操作使用方便,利于提高工作效率。该专利为手动操作的电动工具,对压板联锁的打开、操作桶的插入容差以及插入识别、接地刀闸的扭转到位判断等未做考虑,无法应用在机器人上。
发明内容
发明目的:本发明针对上述不足,提出了一种接地刀闸操作机构,
技术方案:
一种接地刀闸操作机构,包括:
对接支架;
伸缩压板组件,通过轴承转动安装在所述对接支架上,其上安装有用于下压柜体地刀联锁压板的伸缩压板;
操作头组件,与机器人传动机构对接,并由机器人相关传动机构提供伸缩及回转自由度;其前端设有与所述接地刀闸操作杆配合的对接槽,用于接地刀闸操作;
所述操作头组件与所述对接支架之间通过自适应组件配合连接,并通过所述自适应组件实现所述操作头组件的自适应定位。
还包括微视角相机组件,其设置在所述操作头组件的操作头内,用于实现操作头组件与柜体接地刀闸操作杆的同心定位。
所述微视角相机组件包括固定件、相机杆以及微视角相机,所述固定件与所述机器人传动机构对接,所述相机杆与所述固定件之间通过自调整弹簧连接,在所述相机杆前端固定安装所述微视角相机。
还包括到位检测组件,所述到位检测组件包括:
检测触发筒,其配合设置在所述操作头组件的操作头内,同时套设在所述微视角相机组件的所述相机杆外;
检测安装环,与所述检测触发筒配合安装,并随着所述检测触发筒运动,其与操作头组件端部之间设置有缓冲弹簧;
接近开关,固定安装在所述操作头组件端部侧面,通过检测所述检测安装环的运动判断所述操作头组件是否操作到位。
在所述检测安装环侧面与所述接近开关的检测槽对应位置处设置有轴向的与所述检测槽对应配合的检测条;所述接近开关通过检测所述检测条是否进入其所述检测槽内判断所述操作头组件是否操作到位。
在所述微视角相机组件的所述相机杆与所述检测触发筒之间还设置有塑料轴承。
所述对接支架面向接地刀闸的端面上开设有对接槽,其另一端面与所述机器人传动机构对接;
所述操作头组件的端部与所述自适应组件配合安装;
所述检测安装环内开设有对接槽,所述微视角相机组件的所述固定件两端分别设有与所述对接支架的对接槽和所述检测安装环的对接槽相对应的对接结构,并进行对接;
所述检测触发筒安装在所述检测安装环端面处,其侧面设置有定位键,所述操作头组件的操作头内与所述检测触发筒侧面的所述定位键相对应的设置有滑动限位槽,且在初始状态下,所述定位键位于所述滑动限位槽后端处;二者通过所述限位键与滑动限位槽的配合实现所述检测触发筒与所述操作头之间的相对滑动及限位。
所述滑动限位槽的长度大于机器人利用伸缩自由度将所述操作头组件插入所述柜体地刀操作孔内的行程距离。
所述操作头组件的端部为定心环,在所述对接支架面向所述接地刀闸的端面的周向上设置有至少三个轴向延伸的支撑杆;所述定心环通过限位法兰固定在所述支撑杆末端处。
所述定心环为锥形定心环,所述限位法兰设计有与所述定心环相对应的锥形安装孔,通过二者配合实现所述操作头组件的自定心。
所述对接支架的对接槽和所述检测安装环的对接槽均采用六方槽。
所述对接支架的对接槽和所述检测安装环的对接槽均设计为其对应的两个六方槽相互偏转一定角度形成。
所述对接支架设有直径大于所述机器人传动机构的对接孔;所述自适应组件一端安装在所述对接支架上;
所述微视角相机组件的所述固定件固定安装在穿设在所述对接支架内的所述机器人传动机构内;
所述操作头组件的操作头端部与所述机器人传动机构对接,同时与所述自适应组件固定连接。
在所述操作头的侧壁上开设有轴向的腰型孔,所述检测触发筒侧壁上与操作头侧壁的腰型孔对应位置处开设有销孔,所述检测安装环固定套设在所述操作头后端上,其侧面固定安装所述接近开关;所述缓冲弹簧套设在所述操作头外,其一端被所述检测安装环限制,另一端通过套设在所述操作头外的缓冲套筒压缩;
所述缓冲套筒的外端面上与所述操作头侧壁的腰型孔对应位置处开设有限位孔,在所述缓冲套筒压缩所述缓冲弹簧后,通过定位键分别穿过所述缓冲套筒的限位孔、所述操作头上的腰型孔固定安装在所述检测触发筒侧壁的销孔上,且在初始状态下,所述检测触发筒安装在所述操作头内时,所述定位键位于所述腰型孔后端处;通过所述定位键与所述缓冲套筒的限位孔配合实现所述缓冲套筒的限位及其在所述操作头外的滑动;
在所述缓冲套筒的侧壁上与所述接近开关的检测槽相对应位置处设置有检测条,所述接近开关通过检测所述检测条是否进入其检测槽内判断所述操作头是否操作到位。
所述腰型孔的长度大于所述机器人利用伸缩自由度将所述操作头组件插入所述柜体地刀操作孔内的行程距离。
在所述操作头后端沿周向开设有密封槽,在所述密封槽的周向上开设有若干安装槽,所述自适应组件的末端设在所述密封槽上,并通过安装在所述安装槽内的固定销进行加固。
在所述密封槽上设置有密封圈,以对所述固定销进行加固。
所述接地刀闸操作杆为六方轴,相应的所述操作头组件前端设置的对接槽设计为其对应的两个六方槽相互偏转一定角度形成。
所述自适应组件为自适应弹簧,所述自适应弹簧前端通过隔套固定安装在所述对接支架的端面上。
本发明与现有技术相比,具有如下有益效果:
1、本发明利用单级或双级内外六方间隙对接特征实现5自由度的被动自适应,并直接通过六方连接杆试实现大力矩的传递,自适应能力较强且结构简单。
2、本发明利用弹簧预压实现多自由的被动自适应能力,在机构做同心对准定位时保证操作头与调整自由度之间具备一定的结构刚性让操作头姿态可控,在机构做插入动作时具备被动自适应的自由度提供了一定的容差能力方便插拔。
3、本发明为接地刀闸操作设计浮动的压板及浮动的操作头,通过单一组件完成接地刀闸联锁压板的打开及接地刀闸六方操作头的操作,提高接地刀闸六方操作杆的对准成功率以及流程执行效率。
4、本发明利用操作头内部的微视角相机实现操作头与接地刀闸六方操作杆的同心定位,且微视角相机具备一定的姿态被动自适应能力,避免外部结构变形对相机产生应力提高相机使用寿命,同时保证相机与操作头同心提高算法准确率。
5、本发明利用操作杆内部的触发机构实现操作杆的插入到位判断,利用拾音设备实现接地刀闸扭转到位判断,有效的避免了柜体机构卡阻的影响。
附图说明
图1为本发明实施例一的地刀操作机构压板受压状态总装示意图;
图2为本发明实施例一的地刀操作机构自然状态局部剖切示意图;
图3为本发明实施例一的地刀操作机构爆炸示意图;
图4为本发明实施例一的伸缩压板组件结构示意图;
图5为本发明实施例一的微视角组件结构示意图;
图6为本发明实施例一的操作头组件结构示意图;
图7为本发明实施例一的扭转容差实现示意图;
图8为柜体地刀示意图;其中,图8a为柜体地刀操作前的状态示意图,图8b为柜体地刀操作后的状态示意图;
图9为本发明实施例一的操作机构粗对准示意图;
图10为本发明实施例一的操作机构压板插入示意图;
图11为本发明实施例一的操作机构微视角相机同心定位示意图;
图12为本发明实施例一的操作机构同心压入示意图;
图13为本发明实施例一的操作机构六方轴及套筒认口插入到位示意图。
图14为本发明实施例二的地刀操作机构压板受压状态总装示意图;
图15为本发明实施例二的地刀操作机构自然状态局部剖切示意图;
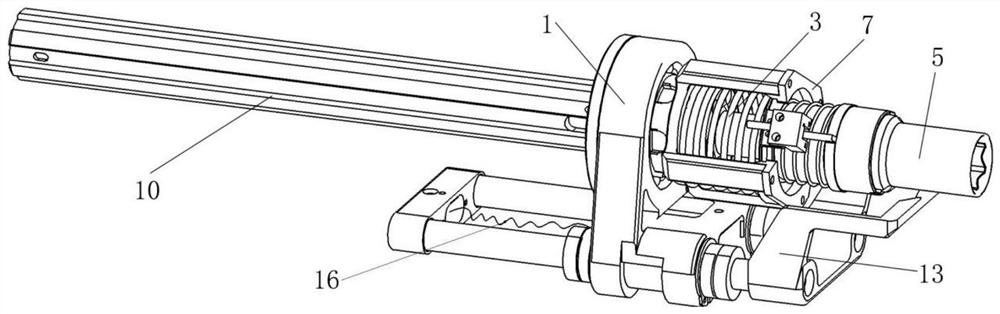
图16为本发明实施例二的爆炸示意图;
图17为本发明实施例二的操作头示意图;
图18为本发明实施例二的接地刀闸操作机构粗对准示意图;
图19为本发明实施例二的接地刀闸操作机构压板插入示意图;
图20为本发明实施例二的接地刀闸操作机构微视角相机同心定位示意图;
图21为本发明实施例二的接地刀闸操作机构同心压入示意图;
图22为本发明实施例二的接地刀闸操作机构六方轴及套筒认口插入到位示意图。
图中,1.伸缩压板组件,11.套环,12.直线轴承,13.压板,14.导杆,15.限位块,16.拉簧,17.轴用弹性挡圈;
2.机构支架组件,21.深沟球轴承,22.轴承隔套,23.支撑杆;
3.自适应组件,31.自适应弹簧,32.弹簧隔套;
4.微视角相机组件,41,固定件,42.自调整弹簧,43.相机杆,44.微视角相机,45.塑料轴承;
5.操作头组件,51.操作头,511.对接槽,512.安装槽,513.密封槽,514.腰型孔,52.缓冲弹簧,53.定心环,54.固定销,55.密封圈;
6.到位检测组件,61.检测触发筒,611.固定孔,612.定位键,613.定位销,62.接近开关,621.检测槽,63.检测安装环,631.检测条;
7.固定件,71.限位法兰,72.缓冲套筒;
8.柜体地刀操作孔,81.地刀联锁压板,82.接地刀闸操作杆;
A.操作头截面,B.接地刀闸操作杆截面;
10.机器人传动机构。
具体实施方式
下面结合附图和具体实施例,进一步阐明本发明。
实施例一:
如图1、2、3所示,本实施例的接地刀闸操作机构包括伸缩压板组件1、机构支架组件2、自适应组件3、微视角相机组件4、操作头组件5以及到位检测组件6;
其中,如图2、3所示,机构支架组件2包括对接支架(图中未示出)及支撑杆23,其中对接支架面向接地刀闸的端面上开设有六方槽,其另一端面通过平键与机器人传动机构10对接,并由机器人相关传动机构提供伸缩及回转自由度;在对接支架面向接地刀闸的端面的周向上均匀设置有至少三个轴向延伸的支撑杆23;在本实施例中,支撑杆23的数量为四个。
如图2、3、4所示,伸缩压板组件1包括套环11、直线轴承12、压板13、导杆14、限位块15以及拉簧16,套环11通过深沟球轴承21套设在机构支架组件2的对接支架外,且深沟球轴承21为并列的两个,在两个深沟球轴承21之间设置有隔套轴承22,以增加轴承间距,进而避免安装在套设在两个深沟球轴承21外的套环11晃动。在套环11下方固定安装有平行于套环11轴线的直线轴承12,在直线轴承12内配合安装有导杆14,在直线轴承12端面处设有轴用弹性挡圈17以进一步固定。在导杆14的后端固定安装有限位块15,在限位块15与套环11之间设置有拉簧16;在导杆14的前端上固定安装有压板13。
如图2、3所示,自适应组件3包括轴向安装的自适应弹簧31,自适应弹簧31的一端通过弹簧隔套32固定安装在对接支架上,并通过对接支架周向上的支撑杆23进行限位,且支撑杆23的长度大于自适应弹簧31极限压缩状态下的长度。
如图2、3、6所示,操作头组件5包括操作头51、缓冲弹簧52及定心环53,其中,操作头51为中空结构,其中空结构形状设计为与接地刀闸操作杆相配合的配合槽511,在本发明中,接地刀闸操作杆形状为六方轴形状,故操作头51的中空结构形状设计为与其相对应配合的配合槽;且在本发明中,操作头51的中空结构形状设计为两个相同的与接地刀闸操作杆相对应配合的六方槽相互偏转一定角度(本发明中,该角度设计为15~60度)形成的配合槽,以实现接地刀闸操作杆及操作头51之间的的3自由度偏转容差,如图7所示。
定心环53为锥形定心环,限位法兰71设计有与定心环53相对应的锥形安装孔,并通过螺钉与机构支架组件2的支撑杆23末端处开设的螺孔配合将定心环53固定在支撑杆23末端处,本实施例通过限位法兰71的锥形安装孔及锥形定心环的配合实现自定心。
缓冲弹簧52固定安装在定心环53的端面上,其末端与操作头51之间设置有到位检测组件6,如图2、6所示,到位检测组件6包括检测触发筒61、检测安装环63、接近开关62以及检测安装环63,其中,接近开关62通过螺钉固定安装在定心环53上,检测安装环63的端面与缓冲弹簧52固定连接,在检测安装环63的侧面上与接近开关62的检测槽621相对应位置处设置有轴向的与检测槽对应配合的检测条631;缓冲弹簧52在自然状态下将检测安装环63预压在其上检测条631位于接近开关62的检测槽621外的所在位置处;接近开关62通过检测检测条631是否进入其检测槽621内判断操作头51是否操作到位。在检测安装环63与缓冲弹簧52连接的端面开设有六方槽。检测触发筒61固定设置在检测安装环63的另一端面上,且在其至少一侧面或相对侧面处设置有轴向的定位键612,检测触发筒61穿设在操作头51内,操作头51内与检测触发筒61侧面的定位键612相对应的设置有滑动限位槽,二者通过定位键612与滑动限位槽的配合实现检测触发筒61与操作头51之间的相对滑动及限位,且滑动限位槽长度大于机器人利用伸缩自由度将操作头组件5插入柜体地刀操作孔8内的行程距离。在初始状态下,定位键612位于滑动限位槽的后端处(即靠近操作头51端部的一端),从而使得操作头51与检测触发筒61之间形成一段行程,该行程长度大于机器人利用伸缩自由度将操作头组件5插入柜体地刀操作孔8内的行程距离,从而使得在机器人利用伸缩自由度将操作头组件5插入柜体地刀操作孔8的行程时,操作头51会与检测触发筒61之间发生相对滑动,待操作头组件5插入柜体地刀操作孔8的行程结束后,操作头51端部套设在检测安装环63外,此时,检测触发筒61并不会发生运动。
微视角相机组件4包括固定件41、自调整弹簧42、相机杆43以及微视角相机44,其中固定件41两端分别设有与对接支架的六方槽相对应和检测安装环63的六方槽相对应的六方形结构,用以分别实现固定件41与对接支架及检测安装环63的对接安装,且实现对接支架与检测安装环63之间的对接,进而传递转矩;进一步地,可以将对接支架的六方槽和检测安装环63的六方槽均设计为其对应的两个六方槽相互偏转一定角度形成,进而可以通过固定件41两侧的两级对应特征六方轴孔配合使套设其外的操作头组件5具备5自由度容差能力;在本发明中,两个六方槽相互偏转的角度设计为15~60度。
自调整弹簧42固定安装在固定件41前端面上,自调整弹簧42的弹性系数小于自适应弹簧31的弹性系数;相机杆43固定安装在自调整弹簧42末端处;自调整弹簧42和相机杆43的直径小于检测触发筒61的内径,且二者均穿设在检测触发筒61内;进一步地,相机杆43与检测触发筒61之间通过塑料轴承45配合安装,以降低二者的滑动摩擦阻力;相机杆43为中空结构,在其中空结构末端处安装微视角相机44,微视角相机44的线束穿过相机杆43及自调整弹簧42连接通电。本实施例中,通过自调整弹簧42为相机杆43内的微视角相机44提供六自由度容差能力,以实现微视角相机44与操作头组件5的同心自适应。
在本实施例中,压板13下端面至操作头51轴心处的距离与柜体地刀操作孔8的半径一致,且在自然状态下导杆14的长度大于套环11至操作头51端部的距离。
本实施例的工作原理如下:
如图8~13所示,执行接地刀闸操作时,先将整个操作机构靠近柜体地刀操作孔8,将柜地刀联锁压板81压下后将操作头51对准并插入接地刀闸操作杆82,扭转操作机构实现接地刀闸操作。
首先在进行操作时,机器人利用自身的视觉定位相机及相关自由度将接地刀闸执行机构移到预设位置,如图9所示。
之后机器人利用伸缩自由度将压板13插入到地刀联锁压板81上方,如图10所示。
然后机器人利用自身自由度将地刀联锁压板81压下并利用内部的微型相机44实现操作头组件5与接地刀闸操作杆82的同心定位,如图11所示。
之后,机器人利用伸缩自由度将操作头组件5插入柜体地刀操作孔8内,此时,由于操作头51内的六方特征并无法保证与接地刀闸操作杆82的外六方角度对齐,因此在该插入的行程中操作头组件5,与检测触发筒61之间发生相对滑动,待操作头组件5插入柜体地刀操作孔8的行程结束后,操作头51端部套设在检测安装环63外,此时,检测触发筒61并不会发生运动;操作头51在此过程中会压缩自适应弹簧31,此时可以使操作头组件5获得六自由被动适应的能力以弥补微型相机44的定位误差从而更方便插入。在插入行程结束后,为进一步调整操作头51内六方特征与接地刀闸操作杆82的外六方的角度偏差,需通过机器人控制执行机构的扭转操作,在扭转过程中,当操作头51内的六方特征与接地刀闸操作杆82的外六方的角度对齐后,操作头51压缩自适应弹簧31的压力释放将操作头51压入接地刀闸操作杆82,同时缓冲弹簧52压力释放后接地刀闸操作杆82会挤压检测触发筒61,检测触发筒61带动检测安装环63压缩缓冲弹簧52,此时,检测安装环63侧面的检测条631插入接近开关62的检测槽621内,实现插入到位判断,如图12所示。
机器人接收到插入到位指令后,减少对扭转驱动电机功率限制,实现接地刀闸操作杆82的扭转,利用机器人自带的拾音器设备拾取接地刀闸操作到位后柜体产生的机构碰撞声实现接地刀闸的操作到位检测。操作到位后反转操作机构释放机构的扭转容差,避免带负载插拔的同时规避了机构反转带动接地刀闸操作杆82转动的情况,如图13所示。
实施例二:
如图14、15所示,本实施例的接地刀闸操作机构也包括伸缩压板组件1、机构支架组件2、自适应组件3、微视角相机组件4、操作头组件5以及到位检测组件6,且其中伸缩压板组件1及自适应组件3结构与实施例一一致。
本实施例中的机构支架组件2也包括对接支架,该对接支架设有直径大于穿设与其内的机器人传动机构10的对接孔;自适应组件3的自适应弹簧31一端通过弹簧隔套32固定安装在对接支架上。
本实施例的微视角相机组件4也包括固定件41、自调整弹簧42、相机杆43以及微视角相机44,但是本实施例的固定件41与实施例一的不同,本实施例的固定件41通过销钉固定安装在穿过对接支架的机器人传动机构10内,其他结构与实施例一一致。
本实施例的操作头组件5包括操作头51及缓冲弹簧52,其中操作头51结构如图17所示,在操作头51的后端沿周向开设有密封槽513,在密封槽513的周向上开设有若干安装槽512,自适应弹簧31的末端绕设在密封槽513上,并通过安装在安装槽512内的固定销54进行加固;在密封槽513上设置有密封圈,进一步对固定销54进行加固。在操作头51的一侧壁或相对侧壁上开设有轴向的腰型孔514。缓冲弹簧52套设在操作头51外;
本实施例的到位检测组件也包括检测触发筒61、接近开关62以及检测安装环63,其中,检测触发筒61一侧壁或相对侧壁上与操作头51侧壁的腰型孔对应位置处开设有销孔,检测触发筒61设置在操作头51内;与实施例一一致的是,自调整弹簧42和相机杆43的直径小于检测触发筒61的内径,且二者均穿设在检测触发筒61内,且相机杆43与检测触发筒61之间通过塑料轴承45配合安装,以降低二者的滑动摩擦阻力。
检测安装环63固定套设在操作头51后端上,其径向向外延伸形成有接近开关安装块,接近开关62通过螺钉固定安装在接近开关安装块上;缓冲弹簧52一端被检测安装环63限制,另一端通过套设在操作头51外的缓冲套筒72压缩;缓冲套筒72的外端面上与操作头51侧壁的腰型孔514对应位置处开设有限位孔,在缓冲套筒72压缩缓冲弹簧52后,定位键612分别穿过缓冲套筒72的限位孔、操作头51上的腰型孔,并通过螺钉固定在检测触发筒61侧壁的销孔上,此时定位键612通过与缓冲套筒72的限位孔配合实现缓冲套筒72的限位及对缓冲弹簧52的压缩。在本实施例中,腰型孔514的长度大于机器人利用伸缩自由度将操作头组件5插入柜体地刀操作孔8内的行程距离。
在本实施例中,在缓冲套筒72的侧壁上与检测安装环63上的接近开关62的检测槽621相对应位置处设置有检测条631,接近开关62通过检测检测条631是否进入其检测槽621内判断操作头51是否操作到位。
在本实施例中,在初始状态下,检测触发筒61安装在操作头51内时,其上的定位键612位于操作头51侧面的腰型孔514后端处,由于腰型孔514的长度大于机器人利用伸缩自由度将操作头组件5插入柜体地刀操作孔8内的行程距离,从而使得在机器人利用伸缩自由度将操作头组件5插入柜体地刀操作孔8的行程时,操作头51会与检测触发筒61之间发生相对滑动,待操作头组件5插入柜体地刀操作孔8的行程结束后,检测触发筒61上的定位键612运动至操作头51侧面的腰型孔514前端处,此时,检测触发筒61并不会发生运动。
本实施例的工作原理如下:
如图18~22所示为该机构执行接地刀闸的操作的主要流程:
如图18所示,首先,机器人利用自身的视觉定位相机及相关自由度将接地刀闸执行机构移到预设位置。
然后,机器人利用伸缩自由度将压板13插入到地刀联锁压板81上方,如图19所示。
之后,机器人利用自身自由度将地刀联锁压板81压下并利用内部微型相机44实现操作头组件5与柜体接地刀闸操作杆82的同心定位,如图20所示。
之后,机器人利用伸缩自由度将操作头组件5插入柜体地刀操作孔8内,此时,由于操作头51内六方特征无法保证与接地刀闸操作杆82的外六方角度对齐,因此在该插入行程中,操作头51与检测触发筒61之间发生相对滑动,待操作头组件5插入柜体地刀操作孔8的行程结束后,检测触发筒61上的定位键612运动至操作头51侧面的腰型孔514前端处,此时,检测触发筒61并不会发生运动;操作头组件5会压缩自适应弹簧31,从而使操作头组件5获得六自由被动适应的能力以弥补微型相机44的定位误差从而更方便其插入。在插入行程结束后,为进一步调整操作头51内六方特征与接地刀闸操作杆82的外六方的角度偏差,需通过机器人控制执行机构的扭转操作,在扭转过程中,当操作头51内的六方特征与接地刀闸操作杆82的外六方的角度对齐后,操作头51压缩自适应弹簧31的预压力释放将操作头51压入接地刀闸操作杆82,同时缓冲弹簧52压力释放后接地刀闸操作杆82会挤压操作头51内的检测触发筒61,此时,检测触发筒61上的定位键612会带动缓冲套筒72在操作头51上的腰型孔514内运动,缓冲套筒72压缩缓冲弹簧52,其侧壁上的检测条631插入接近开关62的检测槽621内,检测安装环63压缩缓冲弹簧52,实现插入到位判断,如图21所示。
机器人接收到插入到位指令后,减少对扭转驱动电机功率限制,实现接地刀闸操作杆82的扭转,利用机器人自带的拾音器设备拾取接地刀闸操作到位后柜体产生的机构碰撞声实现接地刀闸的操作到位检测。操作到位后反转操作机构释放机构的扭转容差,避免带负载插拔的同时规避了机构反转带动接地刀闸操作杆82转动的情况,如图22所示。
以上详细描述了本发明的优选实施方式,但是本发明并不限于上述实施方式中的具体细节,在本发明的技术构思范围内,可以对本发明的技术方案进行多种等同变换(如数量、形状、位置等),这些等同变换均属于本发明的保护范围。
- 一种接地刀闸操作机构
- 浮动接地刀闸操作机构