一种基于深度信念网络的复杂管网泄漏定位方法
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及复杂管网泄漏定位技术领域,具体涉及一种基于深度信念网络的复杂管网泄漏定位方法。
背景技术
复杂管网泄漏定位方法种类繁多,总体来说可分为基于硬件与基于软件的定位技术。基于硬件定位技术大多需要在管网中安装大量传感器,具有很高的安装成本,定位精度受限;基于软件定位技术大多数方法虽可以通过管网参数变化定位泄漏,但是并不能准确建立起管网参数变化与泄漏位置之间的非线性模型。近年来不断发展的人工神经网络方法可以逼近任意非线性函数,一旦经过正确的训练,可以给出输入与输出间良好的映射关系,非常适用于管网定位等复杂系统的预测问题。目前应用最广的反向传播(BP)神经网络由于其初始权值由随机初始化的方法得到,使其容易陷入局部最小点,导致网络的预测精度不够高。
而深度学习作为第三代神经网络,具有较强地从大量无标签样本中提取特征的能力;同时由于其多层的复杂结构及逐层训练的稳定性,能够对大数据量样本进行训练,顺应了大数据时代的潮流,具有广阔的应用前景。
鉴于此,为克服不能建立管网参数变化与泄漏位置之间的非线性模型问题,本发明提供了一种基于深度信念网络的复杂管网泄漏定位方法。
发明内容
本发明的目的在于提供一种基于深度信念网络的复杂管网泄漏定位方法,用于克服不能建立管网参数变化与泄漏位置之间的非线性模型问题。
本发明提供的基于深度信念网络的复杂管网泄漏定位方法,具体按照以下步骤实施:步骤1,获取包括监测点压力值和泄漏位置坐标的数据样本,将标准化处理后的样本数据按照设定比例分为训练样本和测试样本;步骤2,构建基于深度信念网络的复杂管网泄漏定位模型;步骤3,根据测试样本采用逐层无监督贪婪学习算法对复杂管网泄漏定位模型进行预训练;步骤4,采用BP算法对预训练之后的复杂管网泄漏定位模型进行参数寻优,得到复杂管网泄漏定位模型;步骤5,采用步骤4得到的复杂管网泄漏定位模型对步骤1中的测试样本进行泄漏定位,输出定位结果;根据输出的定位结果与测试样本的泄漏位置坐标统计模型诊断准确率。
如上所述的基于深度信念网络的复杂管网泄漏定位方法,进一步优选为,所述的步骤1具体为:步骤1.1,根据管网结构图构建复杂管网水力工况数学模型,并基于基本回路分析法编制MATLAB计算程序,得到泄漏特征值样本集;泄漏特征样本集包括监测点压力差和泄漏位置坐标;步骤1.2,对步骤1.1中采集到的数据进行归一化处理;步骤1.3,将标准化后的样本数据按照设定比例分为训练样本和测试样本。
如上所述的基于深度信念网络的复杂管网泄漏定位方法,进一步优选为,所述的步骤1.1中,复杂管网水力工况数学模型为:
A*G=Q,
B
ΔH=S*|G|*G+Z-DH;
其中,A为关联矩阵,B
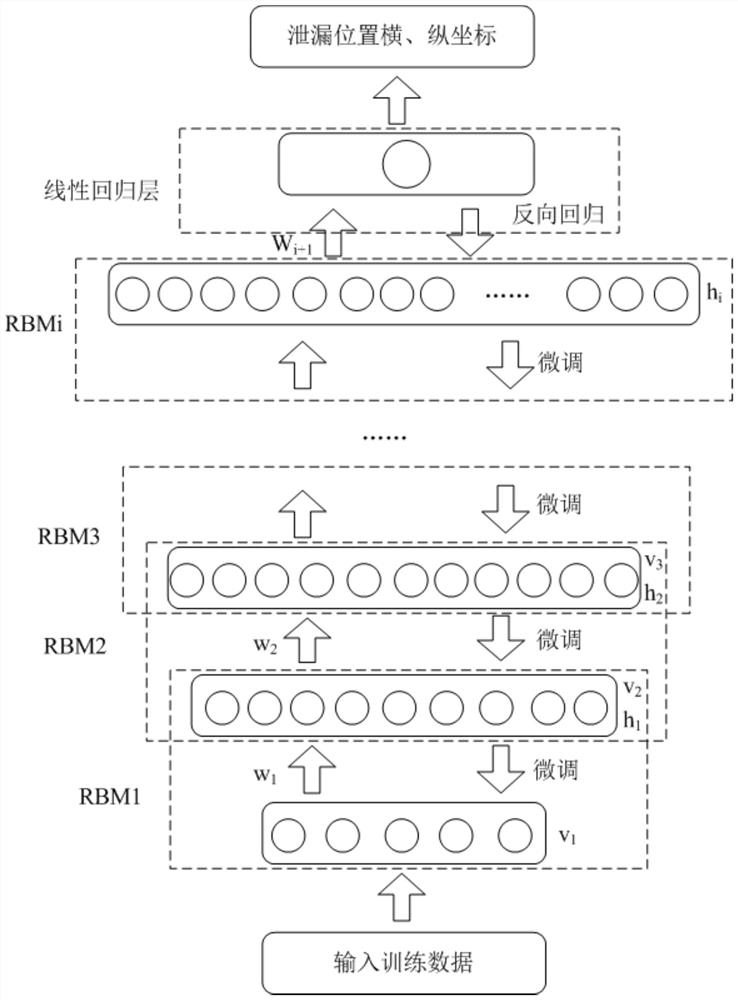
如上所述的基于深度信念网络的复杂管网泄漏定位方法,进一步优选为,所述的步骤2具体为:步骤2.1,构建复杂管网泄漏定位模型的第一层限制玻尔兹曼机单元;步骤2.2,将第一层限制玻尔兹曼机单元的隐藏层作为第二层限制玻尔兹曼机单元的可视层,构建第二层限制玻尔兹曼机单元;步骤2.3,以相同的方式依次构建第i个限制玻尔兹曼机单元;步骤2.4,构建线性回归层,所述线性回归层位于第i个限制玻尔兹曼机单元上方,复杂管网深度信念网络泄漏定位模型构建完成。
如上所述的基于深度信念网络的复杂管网泄漏定位方法,进一步优选为,所述的步骤2.1中,所述的步骤2.1中,每个所述限制玻尔兹曼机单元均包括隐藏层和可视层,所述隐藏层包括n个神经元,为数据输出层;所述可视层包括m个神经元,为数据输入层;所述隐藏层与可视层之间的神经元双向连接,同一隐藏层或可视层的神经元无连接。
如上所述的基于深度信念网络的复杂管网泄漏定位方法,进一步优选为,所述步骤3具体为:步骤3.1,通过交叉验证的方法得到复杂管网泄漏定位模型的隐藏层数、各隐藏层的神经元数、微调迭代步数和学习率;步骤3.2,根据训练样本采用CD算法对第一层限制玻尔兹曼机单元进行训练,直至误差满足条件;步骤3.3,将训练好的第一层限制玻尔兹曼机单元的隐藏层作为输入数据训练下一个限制玻尔兹曼机单元,直至所有的限制玻尔兹曼机单元训练完毕。
如上所述的基于深度信念网络的复杂管网泄漏定位方法,步骤3.2具体包括:步骤3.21,利用训练样本的监测点压力值作为第一层限制玻尔兹曼机单元可视层的输入数据构建隐藏层,公式为:
h=sigmoid(v
其中,h为隐藏层节点值,v为可视层节点值,w为隐藏层与可视层之间的权值,T为微调迭代步数,b为隐藏层的偏置;
步骤3.22,利用步骤3.21中构建的隐藏层重构可视层,公式为:
v'=sigmoid(h
其中,v’为重构可视层节点值,h为隐藏层节点值,w为隐藏层与可视层之间的权值,T为微调迭代步数,a为可视层的偏置;
步骤3.23,再次利用步骤3.22中重构的可视层构建隐藏层,公式为:
h'=sigmoid(v'
其中,h’为重构的隐藏层节点值,v’为重构可视层节点值,v’为重构后的可视层的节点值,b为隐藏层的偏置;
sigmoid函数的公式为:
步骤3.24,更新RBM的参数,具体更新规则如下:
w’=w+ε(vh-v’h’)
a’=a+ε(v-v’)
b’=b+ε(h-h’)
其中,其中ε为学习率,w为隐藏层与可视层之间的权值,a为可视层的偏置,b为隐藏层的偏置;w’为更新后隐藏层与可视层之间的权值,a’为更新后可视层的偏置,b为更新后隐藏层的偏置;v’为可视层节点值,h为隐藏层节点值,v’为重构可视层节点值,h’为重构的隐藏层节点值;
步骤3.25,根据更新后的限制玻尔兹曼机单元参数重新计算可视层节点值与重构可视层节点值的差值;若误差满足结束条件,则完成对限制玻尔兹曼机单元的训练,否则重复以上步骤,直至误差满足条件为止。
如上所述的基于深度信念网络的复杂管网泄漏定位方法,进一步优选为,步骤4具体包括:步骤4.1,将最后一个限制玻尔兹曼机单元的隐藏层作为线性回归层的输入,线性函数作为激活函数,得到最后一层的输出,具体公式如下:
y=w
其中,h
如上所述的基于深度信念网络的复杂管网泄漏定位方法,进一步优选为,步骤5具体包括:步骤5.1,将测试样本的监测点压力值输入复杂管网泄漏定位模型中,得到泄漏位置坐标;步骤5.2,根据步骤5.1得到的泄漏位置坐标与测试样本泄漏位置坐标的误差,计算复杂管网深度信念网络泄漏定位模型的准确率。
如上所述的基于深度信念网络的复杂管网泄漏定位方法,进一步优选为,步骤1.2中,归一化处理公式如下:
其中,X
本发明与现有技术相比具有以下的优点:
本发明提供的基于深度信念网络的复杂管网泄漏定位方法,建立了管网参数变化与泄漏位置之间的非线性模型问题,相比于传统预测方法,在预测准确性上有所提高;并且仅通过建立复杂管网泄漏数据库训练网络就可以完成对整个管网的监测,相比于花费昂贵的设备与耗时较长的寻源,可以极大提高管网泄漏的诊断效率;
相较于直接使用BP算法,本发明通过采用对限制玻尔兹曼机的逐层训练与BP算法参数调优相结合的训练方法,提高了预测精度,具体的,因为经过RBM层的逐层训练后,优化了整个网络的参数,网络的初始值是通过训练RBM得到的,使得深度信念网络相比BP网络具有更好的初始值,并且此时再使用BP算法对整个网络进行微调相当于在已有参数的基础上再进行局部寻优,因此得到的效果也更好。
附图说明
为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明中基于深度信念网络的复杂管网泄漏定位模型的结构示意图图;
图2为图1中限制玻尔兹曼机单元的结构示意图;
图3为复杂管网泄漏定位模型的训练历程图;
图4为本发明中一种具体的复杂管网结构图;
图5为基于深度信念网络的复杂管网泄漏定位模型预测结果与实际结果拟合误差图。
具体实施方式
本实施例公开了基于深度信念网络的复杂管网泄漏定位方法,具体按照以下步骤实施:
步骤1,获取包括监测点压力值和泄漏位置坐标的数据样本,将标准化处理后的样本数据按照设定比例分为训练样本和测试样本;
步骤2,构建基于深度信念网络的复杂管网泄漏定位模型;
步骤3,根据测试样本采用逐层无监督贪婪学习算法对复杂管网泄漏定位模型进行预训练;
步骤4,采用BP算法对预训练之后的复杂管网泄漏定位模型进行参数寻优,得到复杂管网泄漏定位模型;
步骤5,采用步骤4得到的复杂管网泄漏定位模型对步骤1中的测试样本进行泄漏定位,输出定位结果;根据输出的定位结果与测试样本的泄漏位置坐标统计模型诊断准确率。
具体的,所述的步骤1具体为:
步骤1.1,根据管网结构图构建复杂管网水力工况数学模型,并基于基本回路分析法编制MATLAB计算程序,得到泄漏特征值样本集;泄漏特征样本集包括监测点压力差和泄漏位置坐标;
步骤1.2,对步骤1.1中采集到的数据进行归一化处理;
步骤1.3,将标准化后的样本数据按照设定比例分为训练样本和测试样本。
所述的步骤1.1中,复杂管网水力工况数学模型为:
A*G=Q,
B
ΔH=S*|G|*G+Z-DH;
其中,A为关联矩阵,Bf为基本回路矩阵,Q为节点流量列向量,S为阻力特性数矩阵,Z为位能差列向量,DH为水泵扬程,G为段流量列向量,ΔH为管段压差列向量。
具体的,步骤1.2中,归一化处理公式如下:
其中,X
进一步的,所述的步骤2具体为:
步骤2.1,构建复杂管网泄漏定位模型的第一层限制玻尔兹曼机单元;
步骤2.2,将第一层限制玻尔兹曼机单元(RBM)的隐藏层作为第二层限制玻尔兹曼机单元的可视层,构建第二层限制玻尔兹曼机单元;
步骤2.3,以相同的方式依次构建第i个限制玻尔兹曼机单元;
步骤2.4,构建线性回归层,所述线性回归层位于第i个限制玻尔兹曼机单元上方,复杂管网深度信念网络泄漏定位模型构建完成。构建的基于深度信念网络的复杂管网泄漏定位模型的结构如图1所示。
具体的,如图2所示,所述的步骤2.1中,每个所述限制玻尔兹曼机单元均包括隐藏层和可视层,所述隐藏层包括n个神经元,为数据输出层;所述可视层包括m个神经元,为数据输入层;所述隐藏层与可视层之间的神经元双向连接,同一层的隐藏层或可视层的神经元无连接。
进一步的,所述步骤3具体为:
步骤3.1,通过交叉验证的方法得到复杂管网泄漏定位模型的隐藏层数、各隐藏层的神经元数、微调迭代步数和学习率;
步骤3.2,根据训练样本采用CD算法对第一层限制玻尔兹曼机单元进行训练,直至误差满足条件;
步骤3.3,将训练好的第一层限制玻尔兹曼机单元的隐藏层作为输入数据训练下一个限制玻尔兹曼机单元,直至所有的限制玻尔兹曼机单元训练完毕。具体的,其训练过程如图3所示。
具体的,步骤3中,将归一化处理后的训练数据由第一个RBM的可视层输入,对每个RBM都采用对比散度(CD)算法进行训练,当一个RBM训练结束后,固定该RBM的参数不变并训练下一个RBM,即可视层v与隐藏层h,权重w和偏置a,b不变。当所有RBM都训练完成后,即获得深度信念网络参数的初始值。
具体的,步骤3.2具体包括:
步骤3.21,利用训练样本的监测点压力值作为第一层限制玻尔兹曼机单元可视层的输入数据构建隐藏层,公式为:
h=sigmoid(v
其中,h为隐藏层节点值,v为可视层节点值,w为隐藏层与可视层之间的权值,T为微调迭代步数,b为隐藏层的偏置;
步骤3.22,利用步骤3.21中构建的隐藏层重构可视层,公式为:
v'=sigmoid(h
其中,v’为重构可视层节点值,h为隐藏层节点值,w为隐藏层与可视层之间的权值,T为微调迭代步数,a为可视层的偏置;
步骤3.23,再次利用步骤3.22中重构的可视层构建隐藏层,公式为:
h'=sigmoid(v'
其中,h’为重构的隐藏层节点值,v’为重构可视层节点值,v’为重构后的可视层的节点值,b为隐藏层的偏置;
sigmoid函数的公式为:
步骤3.24,更新RBM的参数,具体更新规则如下:
w’=w+ε(vh-v’h’)
a’=a+ε(v-v’)
b’=b+ε(h-h’)
其中,其中ε为学习率,w为隐藏层与可视层之间的权值,a为可视层的偏置,b为隐藏层的偏置;w’为更新后隐藏层与可视层之间的权值,a’为更新后可视层的偏置,b为更新后隐藏层的偏置;v’为可视层节点值,h为隐藏层节点值,v’为重构可视层节点值,h’为重构的隐藏层节点值;
步骤3.25,根据更新后的限制玻尔兹曼机单元参数重新计算可视层节点值与重构可视层节点值的差值;若误差满足结束条件,则完成对限制玻尔兹曼机单元的训练,否则重复以上步骤,直至误差满足条件为止。
进一步的,步骤4具体包括:
步骤4.1,将最后一个限制玻尔兹曼机单元的隐藏层作为线性回归层的输入,线性函数作为激活函数,得到最后一层的输出,具体公式如下:
y=w
其中,hi为最后一个限制玻尔兹曼机单元的隐藏层的节点值,w
步骤4.2,将最后一层网络输出与实际值的误差反向传递,利用BP算法进行有监督的学习再次调整各层权值,得到最终的预测模型。
步骤4以预训练后的各层网络参数为初始值,利用训练样本数据对模型进行有监督的学习,以网络从上而下的各层误差为标准进行微调,具体的,通过采用BP算法将误差逐层向前传递来更新权值,经过一定迭代次数后误差降低到设定的标准值,此时网络训练完成,得到最终的用于预测复杂管网泄漏位置的基于深度信念网络的复杂管网泄漏定位模型。
进一步的,步骤5具体包括:
步骤5.1,将测试样本的监测点压力值输入复杂管网泄漏定位模型中,得到泄漏位置坐标;
步骤5.2,根据步骤5.1得到的泄漏位置坐标与测试样本泄漏位置坐标的误差,计算复杂管网深度信念网络泄漏定位模型的准确率。
本发明还提供了一个具体的复杂管网结构来验证上述基于深度信念网络的复杂管网泄漏定位方法,具体的,复杂管网结构的如图4所示。
首先以图4所示的管网结构图构建复杂管网水力工况数学模型,并基于基本回路分析法编制MATLAB计算程序,得到泄漏特征值数据库,该数据库以复杂管网中设置的监测点的压力变化作为深度信念网络的输入变量,以复杂管网管道泄漏位置横纵坐标作为输出变量,通过模拟改变管网中节点的流量以及每段管道的泄漏位置得到深度信念网络的训练数据。MATLAB为数学建模软件,本实施例中用于根据通过MATLAB软件为复杂管网水力工况数学模型建模,从而得到编程语言。
如图所示,复杂管网结构总共有38个节点,39个管段,其泄漏特征数据库的建立方法为:在管网中除去水泵进水口的恒压点,除去用户和水源处管段,整个管网中设置6个监测点;在每一个节点以及管段的1/4,1/2,3/4处各自模拟泄漏,泄漏量分别为总循环水量的1%、2%、3%、4%、5%,建立起监测点压力变化与泄漏处位置之间的数据对有(37+36)*5*6=2190组;根据每组数据对中已知的关联矩阵、基本回路矩阵、节点流量列向量、阻力特性数矩阵、位能差列向量和水泵扬程,基于基本回路分析法编制MATLAB计算程序得出管段流量列向量和管段压差列向量,得到包括监测点压力值和泄漏位置坐标的泄漏特征值样本集。
对2190组数据进行如下所示的归一化处理,使所有数据都缩放到[0,1]的范围内。将归一化后的数据以4:1的比例随机划分为训练样本和测试样本,其中训练样本用于训练深度信念网络,测试样本用于测试网络性能。
构建基于深度信念网络的复杂管网泄漏定位模型,并通过交叉验证的方法确定深度信念网络的参数。本实施例中,最终确定后的各项超参数为:RBM和微调阶段的学习率均为0.1,微调迭代步数为100步,隐藏层数为2(即由两个RBM堆叠),两个隐藏层的神经元数分别为9和11。
采用BP算法对预训练之后的复杂管网泄漏定位模型进行参数寻优,得到复杂管网泄漏定位模型。
(3)模型性能测试。将需要测试的管网监测点压力差归一化后输入该深度信念网络模型中,即可得到泄漏位置的横纵坐标。图5为复杂管网泄漏定位预测结果与实际结果的误差,结果表明,本发明设计的基于深度信念网络的复杂管网泄漏定位模型预测准确率达到95.11%。
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
- 一种基于深度信念网络的复杂管网泄漏定位方法
- 一种基于深度神经网络模型的给水管网泄漏定位方法