智能驾驶专用自行车模型
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及智能驾驶测试目标领域,特别涉及一种智能驾驶专用自行车模型。
背景技术
汽车交通安全事故在所有交通工具当中发生频率最高;特别是交通复杂的城市道路系统中,行人、骑自行车人、骑摩托车和骑电瓶车人经常不遵守交通规则而发生各种交通事故,并且造成严重的人身伤害。在智能驾驶AEB测试过程中,需要对骑自行车人及自行车进行识别试验,所以必须要有一个人车模型进行AEB试验。目前试验过程中所使用的模型直接采用真实自行车进行改装,改装后的模型虽然其物理性能更接近真实自行车,但是因为其具有的金属结构,不仅会损坏测试车辆还有可能对驾驶员造成人身伤害。一些改进模型在结构上存在明显的刚度不足的问题;且受到撞击后,自行车模型上覆盖的金属箔容易损坏,在多次测试后其雷达反射性能明显下降。此外,现有的人车模型中,骑车假人也不能模仿出真人骑车时的腿部运动姿态,并产生与真人在骑行自行车一样的微多普勒效应。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种智能驾驶专用自行车模型。
本发明提供一种智能驾驶专用自行车模型,包括:
车体,包括车架、设置在所述车架上的前轮和后轮、与车架转动连接的踏板组件以及连接踏板组件和后轮的传动机构;
假人,包括连接所述踏板组件和车架的腿部组件;
在运动状态下,所述后轮与地面接触并产生转动以驱动踏板组件和腿部组件运动。
优选地,所述车架、前轮和后轮为塑料材质,其外表设置有金属反射膜,所述金属反射膜上还设置有保护层,所述后轮上还设置有橡胶胎。
优选地,所述后轮包括后轮轴、安装座、辐条和轮辋;所述踏板组件包括踏板轴以及设置在踏板轴两端的踏板件。
优选地,所述传动机构包括设置在所述后轮轴和踏板轴之间的传动轴,所述传动机构还包括连接所述传动轴和后轮轴的第一齿轮组以及连接所述传动轴和踏板轴的第二齿轮组。
优选地,所述腿部组件包括设置在所述车架上的安装架、铰接设置在所述安装架两侧的大腿件以及与所述大腿件的自由端铰接的小腿件,所述小腿件的自由端与所述踏板件连接。
本发明的有益效果:
本发明中的自行车模型能够在多方面模拟真实自行车的物理特性,确保了其外观形状易被测试车辆识别。整个模型是纯机械结构而不需要任何电池和电机,结构简单且稳定可靠,不易损坏。组成的部件大部分由耐撞击、弹性性能极佳的材质制作而成,在受到测试车辆的撞击时,产生弹性变形可吸收撞击所传递给自行车模型的能量;由于结构良好的弹性,在撞击过后,产生弹性变形的零件可恢复原来的状态,重新组装即可再次使用。为了与真实自行车具有一样的毫米波雷达反射特性,在自行车模型外部包裹金属箔片,在包覆金属箔片外部再包覆橡胶保护层,确保自行车模型在重复多次使用后任具有与真实自行车一样的毫米波雷达反射特性。智能驾驶专用自行车模型在牵引状态下,后轮与地面接触并产生转动以驱动踏板组件和腿部组件运动产生微多普勒效应,可更加真实地模拟真人骑行时的运动特征。
附图说明
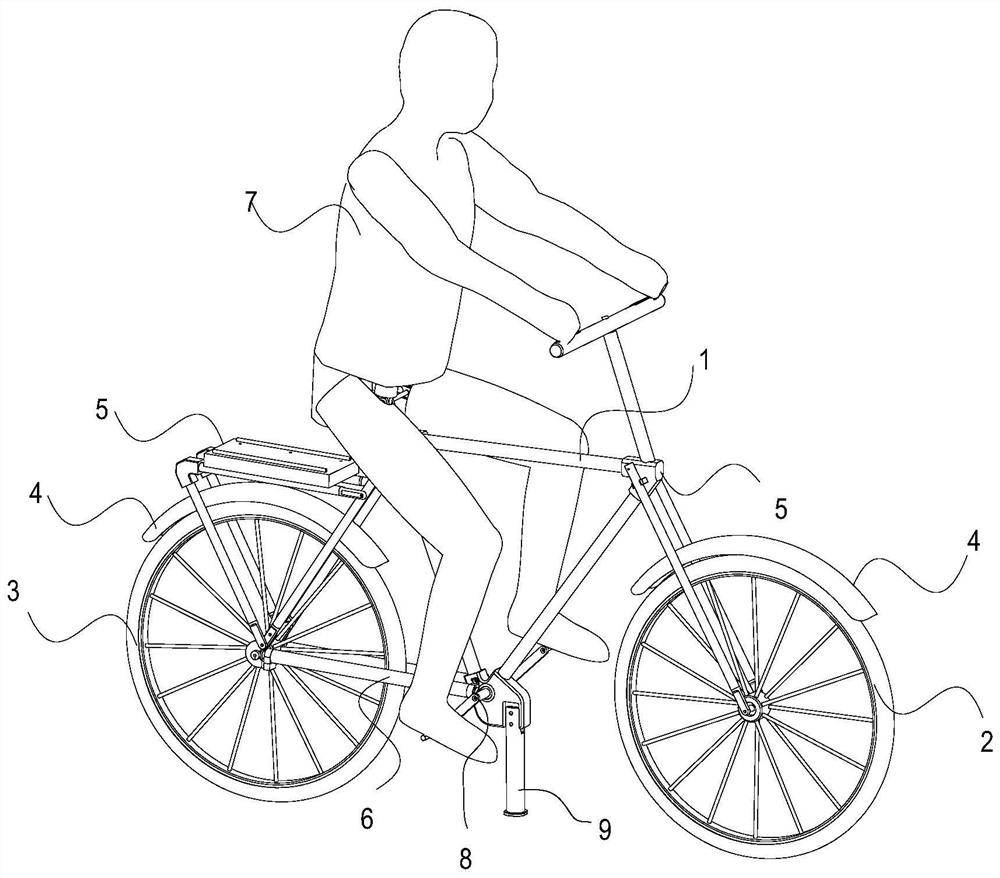
图1为本发明一实施例中智能驾驶专用自行车模型的结构示意图;
图2为图1实施例中后轮的结构示意图;
图3为图1实施例中传动机构的结构示意图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变形和改进。这些都属于本发明的保护范围。
参照图1至图3,在本发明的智能驾驶专用自行车模型中,车体包括车架1、设置在所述车架1上的前轮2和后轮3、与车架1转动连接的踏板组件8以及连接踏板组件8和后轮3的传动机构6;假人7包括连接所述踏板组件8和车架1的腿部组件;在运动状态下,所述后轮3与地面接触并产生转动以驱动踏板组件8和腿部组件运动。
具体的,所述车架1、前轮2和后轮3为塑料材质,其外表设置有金属反射膜,所述金属反射膜上还设置有保护层,所述后轮3上还设置有橡胶胎。所述后轮3包括后轮轴35、安装座33、辐条34和轮辋31;所述踏板组件8包括踏板轴81以及设置在踏板轴81两端的踏板件。所述传动机构6包括设置在所述后轮轴35和踏板轴81之间的传动轴64,所述传动机构6还包括连接所述传动轴64和后轮轴35的第一齿轮组以及连接所述传动轴64和踏板轴81的第二齿轮组。所述腿部组件包括设置在所述车架1上的安装架、铰接设置在所述安装架两侧的大腿件以及与所述大腿件的自由端铰接的小腿件,所述小腿件的自由端与所述踏板件连接。
在本发明中,车架1主要是由韧性良好的塑料制成,不仅价格便宜,材料容易获取,而且具有很好的耐冲击性能,在受到测试车辆撞击时产生弹性变形,车架1外层包覆有毫米波反射增强膜,即金属反射膜,优选金属薄膜;可以360°还原金属车架的毫米波雷达反射特性,特别是RCS值。金属薄膜外层还包覆有橡胶材料即保护层,在受到撞击时可以保护金属薄膜不损坏,以保证多次重复使用后其毫米波雷达反射特性不改变。
前轮2与后轮3与地面接触,会产生摩擦,本发明采用真实自行车橡胶轮胎,橡胶轮胎设置在前轮2和后轮3上。前轮2和后轮3与车架1之间安装有轴承,可以保证前轮2与后轮3在运动过程能够正常转动。由于真实自行车轮辐条34在受到撞击时及其容易损坏,故本发明将按照真实自行车轮胎结构,将真实自行车的钢丝辐条改装为塑料辐条,特别是一种PC材质的辐条34,其韧性良好,不易折断。辐条34按照真实自行车轮胎辐条结构改装,主要是利用辐条与安装座33构成的稳定的三角形结构,使车轮结构具有良好的刚性;以保证自行车模型在运动过程中,特别是速度较快的运行速度下,其轮胎仍可以保持稳定的转动。
如图2所示,辐条34交错对立安装在安装座33上,安装座33上具有2排安装孔,轮辋31与辐条34之间采用螺栓32连接;这种结构形式以及安装连接方式可以很好的保证轮胎在测试过程中稳定转动,而不会发生左右摆动而失去真实性。辐条34和轮辋31的外部包覆有可增强毫米波反射率的材料,特别是一种金属薄膜;在自行车模型运动过程中,辐条34和轮辋31可还原真实自行车辐条34和轮辋31的运动状态,且产生与真实自行车一样的微多普勒效应。
挡泥板4采用真实自行车所用的塑料材质的挡泥板4,其外观尺寸可以得到保证,且因为是塑料材质,在受到撞击摩擦时不会损坏变形。
特别是夜间试验的条件下,车体的外观要保证与真实自行车一样的外观特征;因而前后反光片5采用真实自行车上所使用的反光片5,可以很好的反射测试车辆发出的灯光,并且被测试车辆的车载摄像头识别。前后反光片5采用不干胶或魔术贴与车体连接,不仅安装方便,且受到撞击时,可以从车体上脱落,不至于被损坏,增加自行车模型的重复使用性能。
如图1所示,自行车模型后轮3着地,与地面产生摩擦,自行车由底部连接杆9与可移动滑板连接,在可移动滑板前进时,带动自行车的车架1前进,由于后轮3与车架1以轴承连接,与地面接触产生的摩擦力为后轮3提供了转矩而转动。
参照图3,第一齿轮组包括第一锥齿轮62和第二锥齿轮63,第二齿轮组包括第三锥齿轮65和第四锥齿轮66。后轮3转动并且为后轮轴35提供转矩,带动后轮轴35转动,后轮轴35上安装有第一锥齿轮62,传动轴64的一端安装有第二锥齿轮63,第一锥齿轮62与第二锥齿轮63啮合,进而将转动扭矩从轮胎轴传递到传动传动轴64,传动轴64的另一端安装有第三锥齿轮65,第三锥齿轮65与第四锥齿轮66啮合,将转矩传递给踏板轴81,踏板轴81的左后两端呈180度分布安装有踏板件。由此可将自行车运动过程中后轮3的转矩传递给假人7腿部,为假人7腿部摆动提供驱动。
当后轮3向前转动时,该传动方式可保证踏板与后轮3具有相同的转动方向,很好的替代了真实自行车的链条传动,但又比链条传动更具优势,由于极小的锥齿轮,安装节省空间,更不易被损坏,并且由传动传动轴64进行远距离传动。
具体的,后轮轴35与后轮3轮毂紧配,可以保证后轮3转矩传递到后轮轴35上,且后轮轴35与车架1之间安装有滚动轴承,可以极大的减少扭矩传递的损耗,后轮轴35与第一锥齿轮62之间紧配,且第一锥齿轮62与第二锥齿轮63啮合。传动轴64的两端设置有紧配的锥齿轮连接件67,锥齿轮连接件67与车架1之间安装有滚动轴承,第二锥齿轮63设置在其中一锥齿轮连接件67上;如此,后轮3转矩以极小的损耗传递给传动轴64。管套68与车架1紧配,可保证车架1的刚性,传动轴64与管套68转动连接。第三锥齿轮65设置在另一锥齿轮连接件67上,第三锥齿轮65与第四锥齿轮66啮合,且第四锥齿轮66与踏板轴81紧配,踏板件与车架1之间安装有滚动轴承。踏板件包括设置在踏板轴81两端并呈180度安装的踏板连接杆82,以及设置在踏板连接杆82上的踏板83。踏板轴81与踏板连接杆82之间有防转槽,以确保左右踏板始终呈180度分布。
假人7主体以蓬松多孔非金属材质制成,假人7与自行车模型车架1可分离,腿部组件包括设置在所述车架1上的安装架、铰接设置在所述安装架两侧的大腿件以及与所述大腿件的自由端铰接的小腿件,所述小腿件的自由端与所述踏板件连接。安装架与大腿件的铰接区域构成假人7的髋关节,大腿件与小腿件的铰接区域构成假人7的膝关节,两关节均可转动,保证了在自行车模型运动过程中,其腿部能够自然的摆动,从视觉上看,假人7摆腿动作与真人踩动脚踏板驱动自行车动作高度相似,本发明极大的还原了真实骑自行车人在骑行自行车时的运动状态,骑自行车人的腿部摆动所产生的微多普勒效应与真实骑自行车人的腿部摆动产生的微多普勒效应一致。
本发明的有益效果:
本发明可以解决现有智能驾驶AEB测试用自行车模型外观尺寸与真实骑自行车人及自行车差距大的问题,可以更加真实的还原真实骑自行车人在骑行自行车时的运动状态,还原真实骑自行车人在骑自行车时腿部摆动时所产生的微多普勒效应。
本发明可以解决现有智能驾驶AEB测试用自行车模型很难做到多次重复使用的问题,车架1具有毫米波雷达反射特性的金属薄膜受橡胶层保护,在受到严重撞击摩擦后任具有毫米波雷达反射特性。
本发明可以解决现有自行车模型对测试车辆损坏的风险及避免对驾驶员造成人身伤害,采用材料轻质柔软、结构可分离均对测试车辆起到很好的保护作用。
本发明的车轮、轮辐与轮辋均覆盖有可增强毫米波雷达反射特性的材料,可保证其车轮RCS值与真实自行车轮RCS值一致;还可保证其运动过程中轮子产生的微多普勒效应与真实自行车运动过程中所产生的微多普勒效应一致。
本发明主体由非金属轻质材料组成,整体质量轻,便于运输,使用方便。组成材料具有易获取,抗撞击,韧性好的性能;组成结构简单且稳定可靠,生产成本低,生产周期短。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
以上内容是结合具体的实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换。
- 智能驾驶专用自行车模型
- 智能驾驶专用自行车模型