一种减速器传动误差测试装置及方法
文献发布时间:2023-06-19 11:08:20
技术领域
本申请涉及精密测试技术及机械传动技术领域,具体而言,涉及一种减速器传动误差测试装置及方法。
背景技术
减速器的传动误差是减速器在运动过程中理论输出和实际输出的差值,是一种减速器内部齿与齿啮合优劣的直接表现形式,从本质上反应了减速器的齿形设计和实际加工水平。对减速器的传动误差的检测,即对减速器运动过程中的输入和输出角度的检测。
目前,对减速器的输入端和输出端的转动角度的同步采集,主要采用是在减速器的输入端和输出端安装圆光栅的方式,而圆光栅属于安装要求高的高精度传感器组件,对装配精度的要求高,在减速器的输入端和输出端安装圆光栅时,需要以高稳定性的铸铁或大理石平台为基础,并另设计高精度结构件来安装和保护圆光栅,从而导致了减速器的传动误差的测试过程复杂,难度大,对操作人员的要求很高,测试效率低。此外,还可采用准静态测试方法对减速器的输入端和输出端的转动角度进行采集,准静态测试方法是间歇性的使减速器的输入端旋转一指定角度后停止,测试减速器输出端的转动角度,而采用准静态测试方法,一方面,由于该方法是对传动误差的离散化处理,另一方面,每次测量暂停的瞬间又不可避免的引入了齿隙及微小的弹性形变,从而导致实际的测试结果与传动误差之间存在一定的差异性,测试结果的误差大,对于机器人用减速器这种高精度产品而言,这种误差显然是难以接受的,同时,采用准静态测试方法测试减速器的输出端转角时,也需要借助其他大型高精度的仪器设备,例如三坐标等,导致测量过程复杂,测试效率低,无法得到广泛应用。
因此,目前已有的减速器的传动误差的测试方法的操作复杂,难以在实际应用中广泛使用。
发明内容
本发明的目的在于解决现有技术中减速器的传动误差的测试方法的操作复杂,难以在实际应用中广泛使用的技术问题。
为解决上述技术问题,本发明提供了一种测试装置,包括:底座;测试工装,所述测试工装设置于待测试的减速器的输出端,并在所述输出端的带动下进行同步转动,所述减速器固定于所述底座上;驱动组件,所述驱动组件的输出端与所述减速器的输入端相连,以用于驱动所述减速器的输入端进行转动,确定所述减速器的输入端旋转角度信息;检测组件,所述检测组件包括位于所述减速器的输出端一侧的激光跟踪仪,以及设置于所述测试工装上并对所述激光跟踪仪发射的激光具有反射功能的靶球,所述靶球与所述激光跟踪仪相配合,以用于确定所述靶球的运动轨迹信息;接收组件,所述接收组件的一端与所述驱动组件电连接,另一端与所述检测组件电连接,所述接收组件用于接收所述减速器的输入端旋转角度信息以及所述靶球的运动轨迹信息,并根据所述减速器的输入端旋转角度信息以及所述靶球的运动轨迹信息,确定所述减速器的传动误差。
可选地,所述测试工装包括一具有止口的工装板,所述减速器的输出端上设置有与所述止口配合的输出端止口,所述测试工装通过所述止口与所述输出端止口相配合,并在所述减速器的输出端的带动下进行同步转动。
可选地,所述工装板上对称分布有延伸臂,所述靶球对称设置于所述延伸臂的端部,所述靶球的数量为多个。
可选地,所述测试工装的所述延伸臂上设置有旋转水平仪,所述旋转水平仪用于确定所述靶球的运动起点。
可选地,所述驱动组件包括电机、与所述电连接的编码器以及控制所述电机的驱动器,所述电机位于所述底座一侧,所述电机的输出端的伸出轴与所述减速器的输入端相连,以用于驱动所述减速器的输入端进行转动,并通过所述编码器确定所述减速器的输入端旋转角度信息,所述驱动器的一端与所述电机电连接,另一端与所述接收组件电连接,所述驱动器用于接收所述接收组件的控制指令,对所述电机的转动进行控制,并将所述编码器确定的所述减速器的输入端旋转角度信息发送给所述接收组件。
可选地,所述底座、所述测试工装和固定于所述底座上的待测的所述减速器,以及与所述减速器连接的所述电机为一个或多个,所述底座、所述测试工装和所述电机的数量与待测试的所述减速器的数量相对应。
可选地,所述接收组件包括数据采集仪和显示屏,所述数据采集仪与所述显示屏电连接,所述数据采集仪用于接收所述减速器的输入端旋转角度信息和所述靶球的运动轨迹信息,依据所述减速器的输入端旋转角度信息和所述靶球的运动轨迹信息,确定所述减速器的传动误差,并将所述减速器的传动误差显示于所述显示屏上。
可选地,所述测试装置还包括有控制器,所述控制器用于调整所述电机和所述激光跟踪仪的工作参数。
本发明还提供一种减速器传动误差测试方法,用于对如上所述的减速器传动误差测试装置进行控制,其中,所述方法包括:获取所述减速器的输入端旋转角度信息和所述靶球的运动轨迹信息;根据所述减速器的输入端旋转角度信息,提取所述减速器的输入端旋转角度,并根据所述靶球的运动轨迹信息,提取所述减速器的输出端旋转角度;根据所述减速器的输入端旋转角度和所述减速器的输出端旋转角度,依据公式θ
可选地,根据所述靶球的运动轨迹信息,提取所述减速器的输出端旋转角度的步骤包括:根据所述靶球在空间直角坐标系OXYZ中的坐标值,通过三角公式θ=arctan(y/x),确定所述减速器的输出端的转动角度,其中,x为所述靶球在空间直角坐标系OXYZ中X轴方向上的坐标值,y为所述靶球在空间直角坐标系OXYZ中Y轴方向上的坐标值。
在上述技术方案中,通过靶球和激光跟踪仪的配合使用,得到靶球在随测试工装进行转动过程中的运动轨迹信息,其中,运动轨迹信息可通过空间直角坐标系中的一连串的坐标的进行表示,其后,根据靶球的运动轨迹信息得到减速器的输出端转动角度,本发明采用坐标转换的方式,消除了装配过程对减速器传动误差带来的影响,所采用的测试方法简单,对操作者无需太多技术要求,在对不同规格、型号的减速器进行传动误差的测试时,只需简单的匹配一用以安装靶球的已知形状尺寸的测试工装即可,测试效率高,可在实际应用中广泛使用。
应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
附图说明
此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本申请的实施例,并与说明书一起用于解释本申请的原理。显而易见地,下面描述中的附图仅仅是本申请的一些实施例,对于本领域普通技术者来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。在附图中:
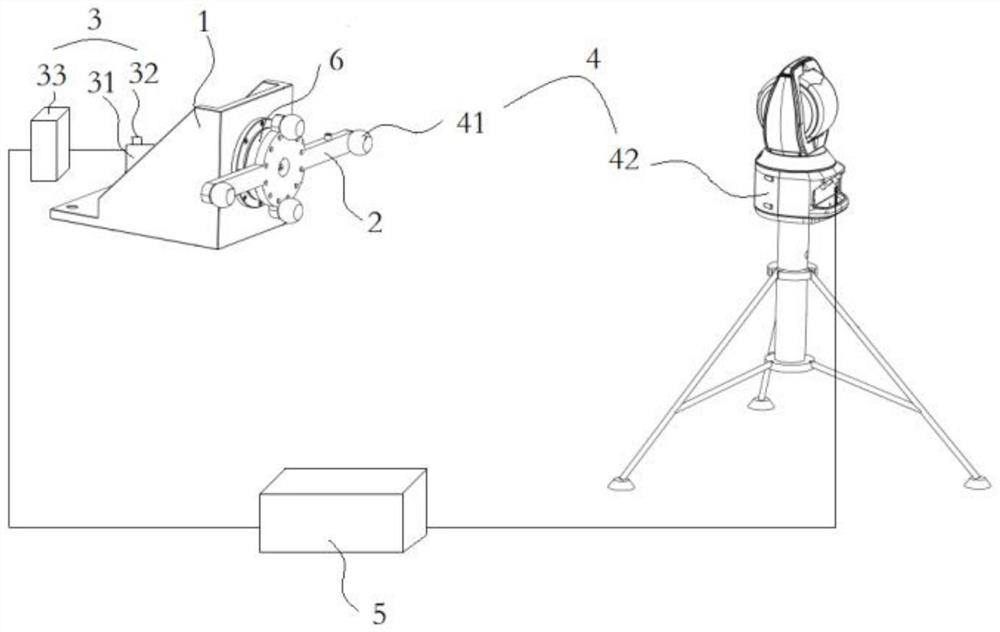
图1是根据一示例性实施例示出的减速器传动误差测试装置的结构的示意图。
图2是根据一示例性实施例示出的减速器传动误差测试装置中固定于底座上的待测试的减速器与驱动组件的连接示意图。
图3是根据一示例性实施例示出的减速器传动误差测试装置中固定于底座上的待测试的减速器与驱动组件的截面示意图。
图4是根据一示例性实施例示出的待测工装的结构示意图。
图5是根据一示例性实施例示出的在减速器传动误差测试装置中空间直角坐标系的示意图。
图6是本发明一种减速器传动误差测试方法的流程示意图。
图7是根据一示例性实施例示出的待测试样品为多个的减速器传动误差测试装置的结构的示意图。
图8为根据一示例性实施例示出的待测样品为多个的减速器传动误差测试结构框图。
图9是根据一示例性实施例示出的待测试样品为多个的减速器传动误差测试方法的流程示意图。
附图标记说明如下:1、底座;2、测试工装;21、止口;22、工装板工装板;221、延伸臂;2211、第一延伸臂;2212、第二延伸臂;2213、第三延伸臂;2214、第四延伸臂;23、旋转水平仪;3、驱动组件;31、电机;311、法兰;32、编码器;33、驱动器;4检测组件;41、靶球;411、第一靶球;412、第二靶球;413、第三靶球;414、第四靶球;42、激光跟踪仪;5、接收组件;6、待测试的减速器。
具体实施方式
体现本发明特征与优点的典型实施方式将在以下的说明中详细叙述。应当理解的是本发明能够在不同的实施方式上具有各种的变化,其皆不脱离本发明的范围,且其中的说明及图示在本质上是当作说明之用,而非用以限制本发明。
为了进一步说明本发明的原理和结构,现结合附图对本发明的优选实施例进行详细说明。
图1是根据一示例性实施例示出的减速器传动误差测试装置的结构示意图,如图1所示,该测试装置包括有底座1,测试工装2,驱动组件3,检测组件4和接收组件5,待测试的减速器6固定于所述底座1上,其中,驱动组件3包括电机31、与电机31电连接的编码器32,以及控制电机31的驱动器33,需说明的是,编码器32可设置于电机31内部,也可设置于电机32的外部,编码器32与电机31的相对位置不进行限定,电机31位于底座1一侧,电机31的输出端的伸出轴与减速器6的输入端通过法兰311连接,电机31用于驱动减速器6的输入端进行转动,并通过电连接的编码器32确定减速器6的输入端旋转角度信息,驱动器33的一端与电机31电连接,另一端与接收组件5电连接,驱动器33用于接收来自接收组件的控制指令,对电机31的转动进行控制,并将编码器32确定的减速器6的输入端旋转角度信息发送给接收组件5。请继续参阅图1,其中,检测组件4包括设置于测试工装2上的靶球41,以及位于减速器6的输出端一侧的激光跟踪仪42,靶球41用于反射激光跟踪仪42发出的激光,激光跟踪仪42与靶球41相配合,可获取靶球41随减速器6的输出端进行同步运转过程中的运动轨迹信息,接收组件5的一端与驱动组件3电连接,另一端与检测组件4电连接,接收组件5用于接收减速器6的输入端旋转角度信息,以及靶球41的运动轨迹信息,并根据接收的减速器6的输入端旋转角度信息以及靶球41的运动轨迹信息,确定减速器6的传动误差。
在本实施例中,减速器6可通过输入端上连接的电机31进行驱动,由于电机31的输出端的伸出轴与减速器6的输入端固定连接,因此,减速器6的输入端的转动角度与电机31的转动角度相同,减速器6的输入端的转动角度与编码器32反馈的转动角度是一致的,通过一与电机31电连接的编码器32,可将电机31的旋转位移转换成数字脉冲信号,所述驱动器33可接收数字脉冲信号并将其作为减速器6的输入端旋转角度信息发送至接收组件5进行下一步的处理。
进一步地,在减速器6的输出端上设置有测试工装2,由于减速器6在电机31的驱动下会不停地进行转动,位于减速器6的输出端上的测试工装2也会发生同步转动,因此,位于测试工装2上的靶球41也会发生同步转动,靶球41的转动角度即为减速器6的转动角度,测试工装2上设置的靶球41与减速器6的输出端一侧的激光跟踪仪42配合使用,可确定靶球41在随测试工装2运转过程中的运动轨迹信息,根据所述运动轨迹信息,可提取出减速器6的输出端转动角度。
示例性的,可通过建立空间直角坐标系OXYZ,对靶球41的运动轨迹采用空间直角坐标系OXYZ中的多个坐标进行表示,方便后续从靶球41的运动轨迹信息中提取出减速器6的输出端转动角度。
示例性的,如图4所示,测试工装2包括一具有止口21的工装板22,止口21为凸止口或凹止口,相对应地,与止口21相配合的位于减速器6的输出端上的输出端止口也为凸止口或凹止口,当止口21为凸止口时,输出端止口为凹止口,而当止口21为凹止口时,输出端止口为凸止口,止口21与输出端止口之间通过螺钉进行固定,从而使得测试工装2在减速器6的输出端的带动下进行同步转动,工装板22包括有对称分布有延伸臂221,延伸臂221的数量为多个,设置于延伸臂221端部的靶球41的数量也为多个,靶球41对称分布于延伸臂221的端部,且靶球41的数量小于或等于延伸臂221的数量。例如,可将延伸臂221的数量设置为4个,将靶球41的数量设置为2个,或将延伸臂221的数量设置为4个,将靶球41的数量设置为4个。需要说明的是,考虑到测试工装2在转动过程中的稳定性,延伸臂221需对称分布于工装板22上,而设置于延伸臂221端部的靶球41在延伸臂221上也为对称分布,从而使得安装有靶球41的测试工装2在转动过程中,具有较高的稳定性。
本实施例中,以靶球41的数量与延伸臂221的数量均为4为例,根据靶球41的运动轨迹信息,获取减速器6的输出端转动角度的步骤进行详细说明。
如图4所示,当靶球41的数量与延伸臂221的数量均为4时,延伸臂221包括对称分布的第一延伸臂2211、第二延伸臂2212、第三延伸臂2213和第四延伸臂2214,靶球41包括有设置于第一延伸臂2211端部的第一靶球411,设置于第二延伸臂2212端部的第二靶球412,设置于第三延伸臂2213端部的第三靶球413以及设置于第四延伸臂2214端部的第四靶球414。
如图5所示,首先,在所述测试工件2所在空间,建立空间直角坐标系O
其次,调整激光跟踪仪42,使其发射的激光至靶球41处后,能被靶球41反射,并在激光跟踪仪42所在空间,建立空间直角坐标系O
得到变换矩阵
其中,依据坐标转换得到变换矩阵
进一步地,可随机选择四个靶球中的一个,例如选择第一靶球411,在减速器6的输出端发生转动的过程中,激光跟踪仪42会连续地发射激光至第一靶球411处,并接收第一靶球411反射的激光,通过靶球41与激光跟踪仪42的相互配合,可得到第一靶球411在空间直角坐标系O
基于第一靶球411在空间直角坐标系O
在本实施例中,得到减速器6的输出端转动角度,以及从减速器6的输入端转动角度信息中提取得到减速器6的输入端转动角度后,依据公式:θ
示例性的,在测试工装2的延伸臂221上还设置有旋转水平仪23,旋转水平仪23用于确定靶球41的运动起点。
如图5所示,通过旋转水平仪23可将第二靶球412和第四靶球414的X向坐标调整为零,而将第一靶球411和第三靶球413的Y向坐标调整为零,从而有利于后续数据的处理。
示例性的,接收组件5包括数据采集仪和显示屏,数据采集仪与显示屏电连接,数据采集仪用于接收减速器6的输入端旋转角度信息,以及靶球41的运动轨迹信息,依据接收的减速器6的输入端旋转角度信息以及靶球41的运动轨迹信息,确定减速器6的传动误差,并将减速器6的传动误差显示于显示屏上。
本实施例中,数据采集仪可对接收减速器6的输入端旋转角度信息,以及靶球41的运动轨迹信息进行实时采集和存储,待确定减速器6的传动误差后,则清除采集和存储的数据,以便于后续数据处理。
示例性的,测试装置5还包括有控制器,控制器用于调整电机31和激光跟踪仪42的工作参数。
在本实施例中,可通过控制器对驱动器33进行设定,从而实现对电机31的调整,例如可在驱动器33上对电机31的旋转速度或运行转速/时间进行设定,使电机31按照设定的旋转速度进行运转,或是对激光跟踪仪42的数据采样频率进行设定。
本发明还提供有一种减速器传动误差测试方法,如图6所示,所述方法包括:
步骤10、获取所述减速器的输入端旋转角度信息和所述靶球的运动轨迹信息。
步骤20、根据所述减速器的输入端旋转角度信息,提取所述减速器的输入端旋转角度,并根据所述靶球的运动轨迹信息,提取所述减速器的输出端旋转角度。
步骤30、根据所述减速器的输入端旋转角度和所述减速器的输出端旋转角度,依据公式θ
进一步地,根据所述靶球的运动轨迹信息,提取所述减速器的输出端旋转角度的步骤包括:
根据所述靶球在空间直角坐标系OXYZ中的坐标值,通过三角公式θ=arctan(y/x),确定所述减速器的输出端的转动角度,其中,x为所述靶球在空间直角坐标系OXYZ中X轴方向上的坐标值,y为所述靶球在空间直角坐标系OXYZ中Y轴方向上的坐标值。
需要说明的是,在大部分的机器人中,对减速器的使用均采用“电机+法兰+减速器”的形式,即先将电机、法兰及减速器三者组成组件,其后,将组成的组件安装至机器人的各关节中,尤其在SCARA(Selective Compliance Assembly Robot Arm,选择顺应性装配机器手臂)机器中应用广泛。
基于现有的减速器在机器人中的应用广泛,而现有的对减速器的传动误差进行测试的方式无法满足机器人中减速器的传动误差测试需求,本发明提供的测试装置可对多个减速器的传动误差进行检测,如图7所示,底座1、测试工装2和固定于底座1上的待测的减速器6,以及与减速器6连接的电机31为一个或多个,底座1、测试工装2和电机31的数量与待测试的减速器6的数量相对应。
在本实施例中,由于激光测试仪42可实现空间内360°可测,待激光测试仪42对其中某一待测试的减速器6完成传动误差检测后,即可对另一待测试的减速器6进行传动误差的检测。其中,待测试的减速器6可为多个,待测试的减速器6分别固定于不同的底座1上,且减速器6的输入端与对应的电机31相连,需要说明的是,一台驱动器可完成对多台电机的控制,因此,不需要将待测试的减速器6均与驱动组件3整体相连。
请继续参阅图8,图8为根据一示例性实施例示出的待测样品为多个的减速器传动误差测试结构框图,本实施例中,待测试的减速器与内设有编码器的伺服电机相连。
另外,对不同型号的减速器进行检测时,所采用的测试工装的形状也需进行调整,从而使得所用的测试工装能够满足减速器的传动误差的测试需求。
图9为根据一示例性实施例示出的对多个减速器进行传动误差的流程图,如图所示,在对多个减速器进行误差检测时,首先,需要建立被测样品库,即待测试的减速器库,以及测试工装库,并对测试工装库内的不同测试工装的形位公差进行测量,通过建立测试工装库,使得不同型号的减速器都具有与其进行匹配的测试工装,其中,形位公差为测试工装与空间直角坐标系之间的夹角,即测试工装在X轴方向上、Y轴方向上或是Z轴方向上,分别与X轴、Y轴或Z轴形成的夹角。
其后,对待测样品进行装配,即将减速器和电机固定于底座上,减速器输入端一侧与电机之间通过法兰连接,同时,在减速器的输出端一侧安装测试工装,将靶球安装于测试工装的延伸臂的端部,所述待测样品为多个。
进一步地,将激光跟踪仪与待测样品的相对位置进行调整,将采集仪器分别于激光跟踪仪与电机电连接,需要说明的是,可采用伺服电机代替电机,伺服电机内设置有编码器,可用于对减速器的输入端转动角度信息进行确定。
进一步地,确定靶球的空间直角坐标系和激光跟踪仪所在空间的空间直角坐标系,依据坐标变换,确定变换矩阵,并将变换矩阵存储至数据处理器中,其后,控制电机的转动速度,进行同步采样,并对采样的数据进行处理,得到减速器的输入端转动角度和减速器的输出端转动角度,计算减速器的传动误差,随后,切换至另一待测样品的输出端一侧,进行后续的传动误差的检测。
相对于现有技术中在减速器的输入端和输出端安装圆光栅,对减速器的输入端和输出端的转动角度进行同步采集的方式,以及采用准静态测试方式,间歇性的使减速器的输入端旋转一指定角度后停止,测试减速器输出端的转动角度的方式。本发明通过靶球和激光跟踪仪的配合使用,得到靶球在随测试工装进行转动过程中的运动轨迹信息,其中,运动轨迹信息可通过空间直角坐标系中的一连串的坐标的进行表示,其后,根据靶球的运动轨迹信息得到减速器的输出端转动角度,本发明采用坐标转换的方式,消除了装配过程对减速器传动误差带来的影响,所采用的测试方法简单,对操作者无需太多技术要求,在对不同规格、型号的减速器进行传动误差的测试时,只需简单的匹配一用以安装靶球的已知形状尺寸的测试工装即可,测试效率高,可在实际应用中广泛使用。
上述内容,仅为本申请的较佳示例性实施例,并非用于限制本申请的实施方案,本领域普通技术人员根据本申请的主要构思和精神,可以十分方便地进行相应的变通或修改,故本申请的保护范围应以权利要求书所要求的保护范围为准。
- 一种减速器传动误差测试装置及方法
- RV减速器传动误差测试装置