一种学生体重智能称重设备
文献发布时间:2023-06-19 11:08:20
技术领域
本发明涉及称重技术领域,具体的说是一种学生体重智能称重设备。
背景技术
随着我国经济水平的快速提高,人们对教育事业也愈发的重视,逐渐减越来越多的资源往教育方面倾斜,希望学生能够德智体美劳全面发展,进而人们在重视教育的同时,也希望学生们能够有个健康的身体,进而学校常会定期对学生们进行体质检查,其中体质检查中最基本的一项便是身高体重的测量,但是现有的学生在进行身高体重测量时仍然存在着一定的不足。
现有的学生在进行身高体重测量时常存在着以下的问题:a:现有的学生在进行身高体重测量时,常需要将鞋脱掉,光脚进行测量,进而常会使得体质不好的学生受凉,进而导致感冒,存在着一定的安全隐患;b:现有的学生在机型身高测量时,常因人体站姿不对,导致背部倾斜,从而导致测量数据不准确,进而需要人员进行二次测量,极大的拖慢了测量效率。
为了弥补现有技术的不足,本发明提供了一种学生体重智能称重设备。
发明内容
本发明所要解决其技术问题所采用以下技术方案来实现:一种学生体重智能称重设备,包括支撑套件和辅助套件,支撑套件放置到地面上,支撑套件上安装有辅助套件,其中:
所述支撑套件包括支撑边板、连通杆、连接套、左底板、转动套、右底板、支撑垫板和支撑块,支撑边板对称放置在地面上,支撑边板之间固定安装有连通杆,连通杆为空心结构,连通杆上均匀安装有连接套,连接套上固定安装有左底板,连通杆上对称安装有转动套,转动套上安装有右底板,连接套和转动套上均开设有通孔A,通孔A和连通杆内部连接在一起,左底板和右底板的下端面上交错设置有支撑垫板,支撑垫板外侧设置有支撑块,支撑块固定安装在左底板和右底板的下端面上,工作时,人工将左底板和右底板打开,并平铺在地面上,之后人工根据地面的平整度对支撑垫板进行调节,从而使得设备水平放置,之后被测量人员踩至左底板和右底板上,进行称重,从而达到人员称重的目的。
所述辅助套件包括活动套、转动套杆、伸缩杆、头部压板、滑动螺套、紧固螺栓和背部托板,活动套通过转动连接的方式安装在支撑边板上,活动套上通过转动连接的方式安装有转动套杆,转动套杆上设置有伸缩杆,伸缩杆上安装有头部压板,转动套缸外侧均匀设置有滑动螺套,滑动螺套上设置有螺栓孔D,滑动螺套上螺栓孔D,螺栓孔D的孔径从下到上逐渐减小,滑动螺栓套上螺纹连接的方式安装有有与螺栓孔D相互配合使用的紧固螺栓,滑动螺套上通过螺纹连接的方式安装有背部托板,工作时,测量人员站在支撑套件上,之后人工转动活动套,带动转动套杆转动,之后人工将伸缩杆抽出,并使得头部压板压在测量人员头顶,之后人工驱动滑动螺套沿着伸缩杆进行滑动,使得背部托板将测量人员的背部拖住,之后调节紧固螺栓将滑动螺套固定住,进而固定背部托板,使得背部托板将人体背部拖住,使得测量人员背部挺直,之后人员观察伸缩杆上的刻度,进而达到人体高度测量的目的。
作为本发明的一种优选技术方案,所述左底板和右底板结构一致,左底板上通过滑动连接的方式安装有踩踏板,踩踏板上设置有一块导电区域,其余部分均为绝缘区域,踩踏板和左底板之间连接有复位弹簧,踩踏板上连接有开关板,开关板外侧设置有电源和连通线,电源固定安装在左底板外壁上,连通线和加热板连接在一起,加热板安装在左底板内壁上,踩踏板上固定安装有称重板,称重板的电线穿过连接套和连通杆与显示器连接在一起,显示器固定安装在支撑边板上。
作为本发明的一种优选技术方案,所述支撑垫板上表面为橡胶材料构成,支撑垫板上均匀设置有斜槽C,支撑垫板上让位孔B底部为磁性材料构成,让位孔B外侧设置有驱动转环,驱动转环通过转动连接的方式安装在支撑垫板上,驱动转环表面设置有螺纹,驱动转环外侧均匀设置有相互配合使用的螺纹套杆,螺纹套杆通过滑动连接的方式安装在滑向杆上,滑向杆固定安装在支撑垫板上,螺纹套杆上均匀设置有调节支柱。
作为本发明的一种优选技术方案,所述支撑块为圆台形结构,支撑块上通过回位弹簧安装有受压杆,受压杆外侧均匀抵靠有延伸推板,延伸推板通过滑动连接的方式安装在支撑块上,且和支撑块之间通过第二弹簧连接在一起,延伸推板下端面上通过第三弹簧均匀安装有接触压板,接触压板之间设置有转动辊,转动辊通过转动连接的方式安装在接触压板上。
作为本发明的一种优选技术方案,所述伸缩杆由多个延伸杆组合而成,延伸杆上通过滑动连接的方式安装有卡接块,卡接块表面光滑,卡接块和延伸杆之间连接有弹簧,延伸杆表面均匀设置有与卡接块相互配合使用的让位孔E,延伸杆表面蚀刻有长度尺,延伸杆上均匀设置有与紧固螺栓相互配合使用的的定位螺纹孔F。
作为本发明的一种优选技术方案,所述背部托板为弧形结构,背部托板上通过转动连接的方式均匀安装有辊压柱,辊压柱之间通过第四弹簧连接有推背板。
与现有技术相比,本发明具有以下优点:
1.本发明可以解决现有的学生在进行身高体重测量时常存在以下问题:a:现有的学生在进行身高体重测量时,常需要将鞋脱掉,光脚进行测量,进而常会使得体质不好的学生受凉,进而导致感冒,存在着一定的安全隐患;b:现有的学生在机型身高测量时,常因人体站姿不对,导致背部倾斜,从而导致测量数据不准确,进而需要人员进行二次测量,极大的拖慢了测量效率。
2.本发明中设计了支撑套件,人工驱动左底板和右底板进行转动,使得连接套和转动套在连通杆上进行转动,之后人工将左底板和右底板平铺在地面上,之后人工根据地面的平整度对支撑垫板进行调节,从而使得设备水平放置,人体踩踏到称重板上,称重板感应工作,对人体进行称重,并通过电现在显示器上显示,同时当人体踩踏到称重板上时,因重力作用带动踩踏板往下运动,从而使得开关板和踩踏板上的导电区域连通,进而通过连通线作用使得加热板通电加热,进而提高称重板表面温度,提高了检测人员的舒适性能,极大的避免了检测人员受凉的情况发生。
3.本发明中设计了辅助套件,测量人员站在支撑套件上,之后人工转动活动套,带动转动套杆转动,之后人工将伸缩杆抽出,并使得头部压板压在测量人员头顶,之后人工驱动滑动螺套沿着伸缩杆进行滑动,使得背部托板将测量人员的背部拖住,之后调节紧固螺栓将滑动螺套固定住,进而固定背部托板,使得背部托板将人体背部拖住,使得测量人员背部挺直,之后人员观察伸缩杆上的刻度,进而达到人体高度测量的目的,进而极大的避免了因背部倾斜导致测量数据不准确的情况发生,提高了测量效率。
附图说明
下面结合附图和实施例对本发明进一步说明。
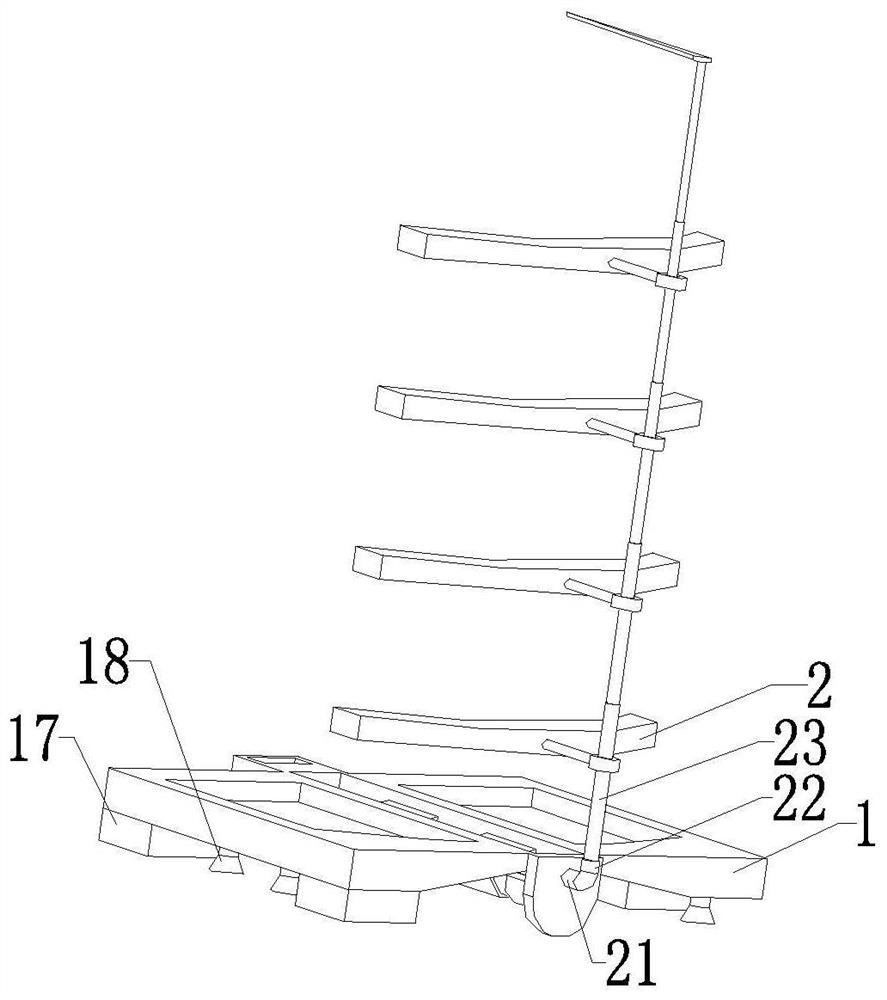
图1是本发明的结构示意图;
图2是本发明的结构示意图的俯视图;
图3是本发明的结构示意图的仰视图;
图4是本发明的图3的A区域的剖面示意图;
图5是本发明的支撑块的结构示意图;
图6是本发明的左底板的结构示意图;
图7是本发明的图6的B-B的截面示意图;
图8是本发明的伸缩杆的结构示意图。
具体实施方式
为了使本发明实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合图1至图8,对本发明进行进一步阐述。
一种学生体重智能称重设备,包括支撑套件1和辅助套件2,支撑套件1放置到地面上,支撑套件1上安装有辅助套件2,其中:
所述支撑套件1包括支撑边板11、连通杆12、连接套13、左底板14、转动套15、右底板16、支撑垫板17和支撑块18,支撑边板11对称放置在地面上,支撑边板11之间固定安装有连通杆12,连通杆12为空心结构,连通杆12上均匀安装有连接套13,连接套13上固定安装有左底板14,连通杆12上对称安装有转动套15,转动套15上安装有右底板16,连接套13和转动套15上均开设有通孔A,通孔A和连通杆12内部连接在一起,左底板14和右底板16的下端面上交错设置有支撑垫板17,支撑垫板17外侧设置有支撑块18,支撑块18固定安装在左底板14和右底板16的下端面上,具体工作时,人工驱动左底板24和右底板16进行转动,使得连接套13和转动套15在连通杆12上进行转动,之后人工将左底板14和右底板16平铺在地面上,之后人工根据地面的平整度对支撑垫板17进行调节,从而使得设备水平放置,之后被测量人员踩至左底板14和右底板16上,进行称重,从而达到人员称重的目的,并且当完成称重时,人工驱动左底板14和右底板16转动并闭合,支撑块18插入至支撑垫板17内部,从而极大的降低了设备的占地面积,便于存放。
所述左底板14和右底板16结构一致,左底板14上通过滑动连接的方式安装有踩踏板141,踩踏板141上设置有一块导电区域,其余部分均为绝缘区域,踩踏板141和左底板14之间连接有复位弹簧142,踩踏板141上连接有开关板143,开关板143外侧设置有电源和连通线144,电源固定安装在左底板14外壁上,连通线144和加热板145连接在一起,加热板145安装在左底板14内壁上,踩踏板141上固定安装有称重板146,称重板146的电线穿过连接套13和连通杆12与显示器147连接在一起,显示器147固定安装在支撑边板11上,具体工作时,人体踩踏到称重板146上,称重板146感应工作,对人体进行称重,并通过电现在显示器147上显示,同时当人体踩踏到称重板146上时,因重力作用带动踩踏板141往下运动,从而使得开关板143和踩踏板141上的导电区域连通,进而通过连通线144作用使得加热板145通电加热,进而提高称重板146表面温度,提高了检测人员的舒适性能,极大的避免了检测人员受凉的情况发生。
所述支撑垫板17上表面为橡胶材料构成,支撑垫板17上均匀设置有斜槽C,支撑垫板17上让位孔B底部为磁性材料构成,让位孔B外侧设置有驱动转环171,驱动转环171通过转动连接的方式安装在支撑垫板17上,驱动转环171表面设置有螺纹,驱动转环171外侧均匀设置有相互配合使用的螺纹套杆172,螺纹套杆172通过滑动连接的方式安装在滑向杆174上,滑向杆174固定安装在支撑垫板17上,螺纹套杆172上均匀设置有调节支柱173,具体工作时,当人工将左底板14和右底板16对折时,支撑块18插入至支撑垫板17的让位孔B中,让位孔B底板的磁性材料将支撑块18吸附住,从而达到折叠设备的目的,极大的减少了占地空间,当人工将设备放置到不平整的地面上去时,人工带动驱动转动环171进行转动,从而通过螺纹配合作用,带动螺纹套杆172沿着滑向杆174进行滑动,从而使得调节支柱173往外侧运动,将支撑底板17撑起,从而达到调节设备平整度的目的。
所述支撑块18为圆台形结构,支撑块18上通过回位弹簧181安装有受压杆182,受压杆182外侧均匀抵靠有延伸推板183,延伸推板183通过滑动连接的方式安装在支撑块18上,且和支撑块18之间通过第二弹簧184连接在一起,延伸推板183下端面上通过第三弹簧185均匀安装有接触压板186,接触压板186之间设置有转动辊187,转动辊187通过转动连接的方式安装在接触压板186上,具体工作时,当设备放置到地面上时,支撑块18上的受压杆182受到挤压作用往上运动,从而带动延伸推板183往外运动,同时延伸推板183上的接触压板186因弹簧作用弹出和地面接触,进而极大的增加了设备和地面的接触面积,增加了设备放置时的稳定性,同时在延伸推板183往外侧运动时,接触压板186上的转动辊187作用,能够避免延伸推板183卡住的情况发生,保证了展开时的顺利性。
所述辅助套件2包括活动套21、转动套杆22、伸缩杆23、头部压板24、滑动螺套25、紧固螺栓26和背部托板27,活动套21通过转动连接的方式安装在支撑边板11上,活动套21上通过转动连接的方式安装有转动套杆22,转动套杆22上设置有伸缩杆23,伸缩杆23上安装有头部压板24,转动套缸外侧均匀设置有滑动螺套25,滑动螺套25上设置有螺栓孔D,滑动螺套25上螺栓孔D,螺栓孔D的孔径从下到上逐渐减小,滑动螺栓套上螺纹连接的方式安装有有与螺栓孔D相互配合使用的紧固螺栓26,滑动螺套25上通过螺纹连接的方式安装有背部托板27,具体工作时,测量人员站在支撑套件1上,之后人工转动活动套21,带动转动套杆22转动,之后人工将伸缩杆23抽出,并使得头部压板24压在测量人员头顶,之后人工驱动滑动螺套25沿着伸缩杆23进行滑动,使得背部托板27将测量人员的背部拖住,之后调节紧固螺栓26将滑动螺套25固定住,进而固定背部托板27,使得背部托板27将人体背部拖住,使得测量人员背部挺直,之后人员观察伸缩杆23上的刻度,进而达到人体高度测量的目的。
所述伸缩杆23由多个延伸杆231组合而成,延伸杆231上通过滑动连接的方式安装有卡接块232,卡接块232表面光滑,卡接块232和延伸杆231之间连接有弹簧,延伸杆231表面均匀设置有与卡接块232相互配合使用的让位孔E,延伸杆231表面蚀刻有长度尺,延伸杆231上均匀设置有与紧固螺栓26相互配合使用的的定位螺纹孔F,具体工作时,当人工将伸缩杆23上的延伸杆231抽出时,卡接块232因弹簧作用卡入至让位孔E中,同时人工观测延伸杆231上的长度,对各个延伸杆的尺寸相加,从而达到人体高度测量的目的。
所述背部托板27为弧形结构,背部托板27上通过转动连接的方式均匀安装有辊压柱271,辊压柱271之间通过第四弹簧272连接有推背板273,具体工作时,当人工进行高度测量时,背部托板27上的推背板273因第四弹簧272作用,抵靠着人体的背部,从而在进行人体高度车辆时,人体背部有一个站立的支撑,使得驼背的测量人员能依靠此背部托板27进行短暂的挺直,进而在进行测量时,能够保证数据的准确性。
工作时:
S1.设备展开:人工驱动左底板24和右底板16进行转动,使得连接套13和转动套15在连通杆12上进行转动,之后人工将左底板14和右底板16平铺在地面上,从而达到设备展开的目的;
S2.水平调节:完成设备展开之后,人工带动驱动转动环171进行转动,从而通过螺纹配合作用,带动螺纹套杆172沿着滑向杆174进行滑动,从而使得调节支柱173往外侧运动,将支撑底板17撑起,从而达到水平的目的;
S3.体重检测:完成水平调节作业之后,人体踩踏到称重板146上,称重板146感应工作,对人体进行称重,并通过电现在显示器147上显示,同时当人体踩踏到称重板146上时,因重力作用带动踩踏板141往下运动,从而使得开关板143和踩踏板141上的导电区域连通,进而通过连通线144作用使得加热板145通电加热,进而提高称重板146表面温度,提高了检测人员的舒适性能,极大的避免了检测人员受凉的情况发生;
S4.身高检测:完成体重检测之后,人工转动活动套21,带动转动套杆22转动,之后人工将伸缩杆23抽出,并使得头部压板24压在测量人员头顶,之后人工驱动滑动螺套25沿着伸缩杆23进行滑动,使得背部托板27将测量人员的背部拖住,之后调节紧固螺栓26将滑动螺套25固定住,进而固定背部托板27,使得背部托板27将人体背部拖住,使得测量人员背部挺直,之后人员观察伸缩杆23上的刻度,进而达到人体高度测量的目的;
S5.重复步骤S1-S4,连续进行人体身高体重测量作业。
以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中的描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种学生体重智能称重设备
- 智能体重秤及智能体重秤控制系统