三电平永磁同步电机无位置传感器模型预测电流控制方法
文献发布时间:2023-06-19 11:11:32
技术领域
本发明涉及三电平逆变器供电的永磁同步电机无位置传感器模型预测电流控制方法,属于电机驱动及控制领域。
背景技术
随着稀土永磁材料、电力电子技术、微电子技术以及微处理器控制技术的发展,永磁同步电机(permanent magnet synchronous motor,PMSM)凭借其高效率、小体积、励磁性能优异、稳定性强等优点,在新能源汽车、航空航天、冶金制造等领域得到了广泛关注。传统的PMSM控制方法主要有矢量控制(vector control,VC)和直接转矩控制(direct torquecontrol,DTC)。VC能够获得类似于直流电动机的良好控制特性,但是需要复杂的坐标变化和准确的电机参数,同时双闭环PI控制结构也在一定程度上增加了系统的调控难度;DTC方法虽然结构简单、响应迅速,但是也存在实时性要求高、计算复杂等缺点。因此,为了实现PMSM的高性能控制,一种响应迅速、控制简单、可实现多目标优化的模型预测电流控制(model predictive current control,MPCC)方法受到了国内外研究者们的广泛关注。
为维持PMSM模型预测电流控制系统的稳定运行,要求获得电机转子精确的实时位置和速度。常用的位置检测方法是安装光电编码器、旋转编码器等位置传感器,但是要求PMSM控制系统有额外的编码器安装空间,增加了系统成本和体积。当编码器或连接电缆发生故障时,将会导致整个PMSM调速系统的失控,降低了系统可靠性。基于此,用各种位置观测算法取代位置传感器成为一个研究热点。传统的无位置传感器控制技术主要可分为高频信号注入和反电动势观测两种。高频信号注入的无位置传感器控制算法,将特定的高频电压信号注入电机,通过分析电机在高频信号激励下的响应电流来提取电机的转子位置信息,然而,高速时由于反电势的干扰高频信号的激励难以提取,因此,通常应用于零速和低速条件下转子位置估计,此外,高频注入的方法需要电压调制器来注入高频信号,多应用于矢量控制算法中,而MPCC通过预测模型取代了电流内环,因此没有电压调制器,导致了高频注入的方法难以应用于MPCC中。基于反电势观测的方法,虽然能够实现中高速区域良好的位置估计性能,然而在低速时由于反电动势难以观测,不能获得理想的控制效果。
发明内容
技术问题:针对上述现有技术,提出一种三电平永磁同步电机无位置传感器模型预测电流控制方法,将无位置传感器控制技术和MPCC技术结合,能够实现三电平逆变器供电的PMSM的低中高速无位置传感器运行,同时,兼顾了中点电位的平衡。
技术方案:一种三电平永磁同步电机无位置传感器模型预测电流控制方法,包括如下步骤:
步骤1:通过转速环的PI控制器获取(k+1)时刻q轴电流的参考值i
步骤2:经过电流传感器获取k时刻的三相定子电流i
步骤3:经过电流观测模型计算k时刻dq轴电流的观测值i
步骤4:经过电流预测模型计算(k+1)时刻dq轴的定子电流预测值i
有益效果:本发明基于NPC三电平逆变器供电的永磁同步电动机,通过构建dq轴电流实际值和观测值的误差PI控制器来提取转子位置信息,不需要额外注入高频信号,也不需要反电动势参与运算,能够实现MPCC算法在低中高速的无位置传感器运行。
附图说明
图1为本发明的三电平永磁同步电机无位置传感器模型预测电流控制原理图;
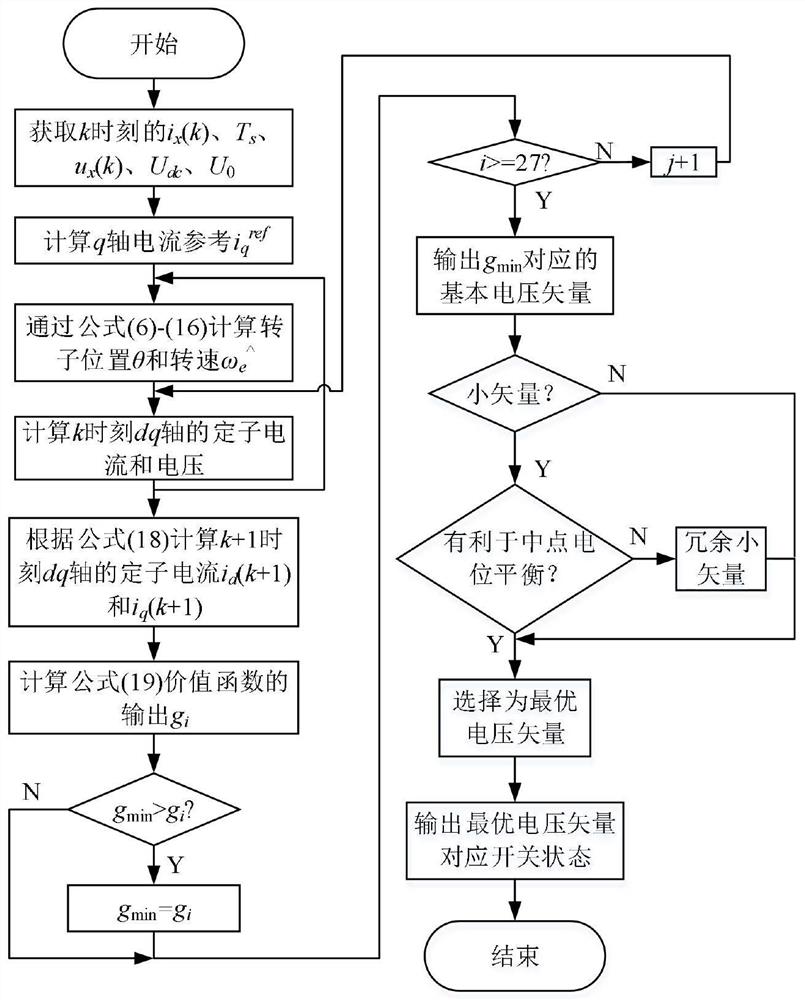
图2为本发明的三电平永磁同步电机无位置传感器模型预测电流控制流程图;
图3为三电平永磁同步电机无位置传感器模型预测电流控制稳态仿真图;
图4为三电平永磁同步电机无位置传感器模型预测电流控制位置跟踪仿真图;
图5为三电平永磁同步电机无位置传感器模型预测电流控制中点电位平衡仿真图。
具体实施方式
下面结合附图并通过实施例对本发明作进一步的详细说明,以下实施例是对本发明的解释而本发明并不局限于以下实施例。
一种三电平永磁同步电机双矢量模型预测磁链控制方法原理图如图1所示,包括转速环PI控制器模块1、最小化价值函数模块2、中点电位平衡模块3、NPC三电平逆变器模块4、永磁同步电机模块5、坐标变换模块6、电流观测模型7、电流预测模型8、转速和位置观测器模块9和转速变换模块10。
如图2所示,本方法包括如下步骤:
步骤1:将参考转速N
其中,k
步骤2:通过电流传感器测量k时刻的三相定子电流i
其中,u
步骤3:电角速度观测值ω
首先,建立公式(6)所示的永磁同步电机的dq轴电流微分方程,并改写为公式(7)所示的电流微分方程,再结合公式(8)得到公式(9)所示的dq轴电流可调模型,并将公式(9)以估计值进行表示,如公式(10)所示;
然后,将公式(9)和公式(10)进行减法运算,得到公式(11)所示的以dq轴实际电流和观测电流之间的偏差为控制量的数学方程;
之后,对公式(11)进行改写,得到公式(12)所示的电流偏差方程①和②,再对公式(12)中的①和②进行减法运算,获得公式(13)所示的实际电角速度和估计电角速度之间的误差方程;
最后,根据公式(13)构建公式(14)所示的dq轴电流误差PI控制器,并经过公式(15)所示的比例运算和公式(16)所示的微分运算获取电角速度的观测值ω
ω
其中,i表示定子电流,L表示定子电感,下标d和q表示dq坐标下的分量;R表示定子电阻;ω
步骤4:(k+1)时刻dq轴电流预测值i
通过公式(17)所示的欧拉方程对公式(6)的电流微分方程的离散化处理得到,如公式(18)所示;
其中,f(k+1)和f(k)表示(k+1)时刻和k时刻函数f的状态;T
步骤5:最小化价值函数和通过中点电位平衡来获最优电压矢量的方法为:
首先将(k+1)时刻dq轴定子电流的参考值i
其中,下标j={1,2,3,...,27}。
本发明方法首先,通过转速环的PI控制器获取(k+1)时刻q轴电流的参考值i
三电平永磁同步电机无位置传感器模型预测电流控制的仿真结果如图3、图4、图5所示。图3分别展示了50r/min和1500r/min两种工况下转速、电流、转矩和中点电位的稳态仿真波形,可以看出无论是低速还是高速,所提出的控制方法均能够获得良好的控制性能;图4展示了50r/min和1500r/min的转子位置跟踪仿真,可以看出两种工况下,观测的转子位置能够准确地跟踪实际的转子位置;最后,图5给出了50r/min和1500r/min的中点电位仿真波形,可以看出对中点电位的抑制效果显著。
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
- 三电平永磁同步电机无位置传感器模型预测电流控制方法
- 一种三电平永磁同步电机无模型预测电流控制方法