控制电负载组
文献发布时间:2023-06-19 11:14:36
相关申请的交叉引用
本申请要求2018年8月21日提交的美国临时专利申请号62/720,674和2018年10月23日提交的美国临时专利申请号62/749,481的优先权,所述专利申请全文在此以引用方式并入。
背景技术
用户环境(诸如住宅或办公楼)例如可使用各种类型的负载控制系统来配置。照明控制系统可用于控制用户环境中的照明负载。照明控制系统可包括能够经由射频(RF)通信进行通信的各种装置,诸如输入装置和负载控制装置。例如,远程控制装置可用于与负载控制系统中的照明装置(例如,灯泡)通信,以控制照明装置的强度水平(例如,照明水平)。所述装置可使用RF通信(诸如
用户环境中的照明装置可由能够对照明装置组进行调光或将照明装置组切换为开和关的公共照明控制装置共同地控制。系统中的照明装置中的一个或多个可由另一个照明控制装置独立地控制。这种对照明装置的子集的独立控制可能致使照明装置中的一些变得与该组中的其余者不同步,使得照明控制装置中的一些“打开”,而其他则“关闭”。当公共照明控制装置被用户致动以切换整个照明装置组(例如,从开到关,或反之亦然)时,与其他不同步的照明装置将保持不同步。照明装置中的每一个将接收致使照明装置从开切换到关或反之亦然的多播消息,使得处于“开”的照明装置将被“关闭”并且处于“关”的照明装置将被“打开”。为了使整个组中的照明装置恢复同步,可能会要求用户独立地控制不同步的照明装置。
用于控制照明装置的控制装置还会能够控制用户环境中的其他类型的电负载和/或负载控制装置。可以非常不同的方式控制不同类型的电负载和负载控制装置。例如,照明装置可进行调光,HVAC系统可控制温度,电动窗帘可升高和降低等。由于在用户环境中可控制许多不同类型的电负载和/或负载控制装置,因此这些电负载和/或负载控制装置的状态可有助于在用户环境内执行用户控制。电负载和/或负载控制装置的状态可能不容易从对于各种类型的电负载通用的单个状态指示器确定。因此,默认指示器可致使最终用户对由此控制的电负载或负载控制装置的实际状态感到困惑。
发明内容
如本文所述,一种远程控制装置可与负载控制装置通信以用于使用技术来控制电负载(例如,照明装置,诸如可控制灯),以确保以快速且有组织的方式控制电负载。远程控制装置可被配置为传输无线信号以用于使多个照明装置的状态(例如,开/关状态)和/或强度水平同步。远程控制装置可包括状态指示器,所述状态指示器包括多个光源。另外,远程控制装置可包括致动部分和旋转部分。远程控制装置可例如经由致动部分或旋转部分接收用户交互事件。用户交互可对应于命令(例如,开命令、关命令、升高命令、降低命令等)。远程控制装置可接收关于对远程控制装置作出响应的照明装置的装置信息。例如,装置信息可包括对远程控制装置作出响应的照明装置的当前强度水平。
远程控制装置可经由状态指示器提供反馈。例如,反馈可基于命令或命令类型来指示对远程控制装置作出响应的照明装置的当前强度水平。例如,远程控制装置可提供反馈,以在命令是第一命令类型时指示第一照明装置的第一当前强度水平,并且在命令是第二命令类型时指示第二照明装置的第二当前强度水平。当第一命令类型是升高命令(例如,旋转部分的顺时针旋转)并且第二命令类型是降低命令(例如,旋转部分的逆时针旋转)时,第一当前强度水平可小于第二当前强度水平。另外,第一照明装置可为对远程控制装置作出响应的具有最低当前强度水平的照明装置,并且第二照明装置可为对远程控制装置作出响应的具有最高当前强度水平的照明装置。
可调整经由状态指示器提供的反馈以指示对远程控制装置作出响应的照明装置的当前强度水平。例如,可在当前强度水平响应于升高命令而升高时调整经由状态指示器提供的反馈以指示第一照明装置的当前强度水平。类似地,可在当前强度水平响应于降低命令而降低时调整经由状态指示器提供的反馈以指示第二照明装置的当前强度水平。
远程控制装置可包括状态指示器,所述状态指示器包括多个光源、旋转部分和致动部分。远程控制装置可接收用户交互事件以用于控制对远程控制装置作出响应的照明装置。例如,用户交互事件可为致动部分的致动。远程控制装置可接收关于对远程控制装置作出响应的多个装置的装置信息。装置信息可包括对远程控制装置作出响应的照明装置的当前强度水平和未来强度水平。远程控制装置可响应于用户交互事件而经由状态指示器提供反馈。例如,反馈可使状态指示器照亮至开始强度水平并且随时间而调整经由状态指示器提供的反馈,以使状态指示器照亮至结束强度水平。当例如命令是开命令时,结束强度水平可为多个装置中的具有最高未来强度水平的装置的未来强度水平,并且开始强度水平可为多个装置中的具有最低当前强度水平的装置的当前强度水平。而且,或者可选地,当命令为关命令时,结束强度水平可为多个装置中的具有最低未来强度水平的装置的未来强度水平,并且开始强度水平可为多个装置中的具有最高当前强度水平的装置的当前强度水平。
远程控制装置可包括状态指示器,所述状态指示器包括多个光源、旋转部分和致动部分。远程控制装置可接收用户交互事件以用于控制对远程控制装置作出响应的照明装置。例如,用户交互事件可为致动部分的致动。远程控制装置可接收关于对远程控制装置作出响应的多个装置的装置信息。装置信息可包括对远程控制装置作出响应的照明装置的当前强度水平和未来强度水平,以及转变时间。远程控制装置可基于命令和装置信息来选择要经由状态指示器提供的相对反馈类型。例如,相对反馈类型可包括下转变动画、上转变动画和响应动画。当命令是开命令时,上转变动画可为选定的反馈类型。当命令是关命令时,下转变动画可为选定的反馈类型。当命令是升高命令或降低命令时,响应动画可为选定的反馈类型。远程控制装置可经由状态指示器使用选定的反馈类型来提供反馈。
主装置可与远程控制装置和对远程控制装置作出响应的一个或多个照明装置通信。主装置可从远程控制接收指示用户交互的第一消息(例如,按钮按下消息、两次按下消息、开始旋转消息、结束旋转消息和更新旋转消息)。主装置可检索对远程控制装置作出响应的一个或多个照明装置中的每一个的强度水平。主装置可基于第一消息以及对远程控制装置作出响应的一个或多个照明装置中的每一个的强度水平来确定命令。主装置可向远程控制装置传输第二消息(例如,转变水平信息消息和/或旋转水平信息消息)。例如,第二消息可包括对远程控制装置作出响应的照明装置的当前强度水平以及转变时间,远程装置可使用所述第二消息来提供反馈。主装置可向对远程控制装置作出响应的一个或多个照明装置传输命令,这可致使一个或多个照明装置转变其相应的强度水平(例如,基于命令)。
附图说明
图1A和图1B描绘了可实现一个或多个消息类型以用于传达数字消息的负载控制系统的示例。
图2A至图2D是具有可被照亮以提供反馈(例如,视觉反馈)的状态指示器(例如,视觉指示器)的远程控制装置的前视图。
图3是示出状态指示器的强度水平的示例曲线的曲线图,以便生成动画。
图4示出了具有可被照亮以提供反馈的状态指示器的远程控制装置的前视图。
图5A和图5B示出了响应于致动器的用于打开照明装置的致动而在远程控制装置的状态指示器上提供反馈的示例场景。
图6A和图6B示出了响应于致动器的用于关闭照明装置的致动而在远程控制装置的状态指示器上提供反馈的示例场景。
图7A和图7B示出了响应于致动器的用于将照明装置打开至最大强度水平的致动而在远程控制装置的状态指示器上提供反馈的示例场景。
图8示出了响应于致动器的用于升高照明装置的强度水平的致动而在远程控制装置的状态指示器上提供反馈的示例场景。
图9示出了响应于致动器的用于降低照明装置的强度水平的致动而在远程控制装置的状态指示器上提供反馈的示例场景。
图10A和图10B示出了响应于致动器的用于升高和降低照明装置的强度水平的致动而在远程控制装置的状态指示器上提供反馈的示例场景。
图11A示出了响应于在致动器的用于升高照明装置的强度水平的致动之后的致动器的用于打开照明装置的致动而在远程控制装置的状态指示器上提供反馈的示例场景。
图11B示出了响应于在致动器的用于降低照明装置的强度水平的致动之后的致动器的用于打开照明装置的致动而在远程控制装置的状态指示器上提供反馈的示例场景。
图12A至图12C是描绘用于查询照明装置的当前状态并响应于识别的状态而生成照明控制命令的示例消息流的通信序列图。
图13A示出了描绘被传输来响应于致动器的用于打开照明装置的致动而执行一个或多个照明装置的相对控制并提供相对反馈的示例消息流的通信序列图。
图13B示出了描绘被传输来响应于致动器的用于关闭照明装置的致动而执行一个或多个照明装置的相对控制并提供相对反馈的示例消息流的通信序列图。
图13C示出了描绘被传输来响应于致动器的用于升高照明装置的强度水平的致动而执行一个或多个照明装置的相对控制并提供相对反馈的示例消息流的通信序列图。
图13D示出了描绘被传输来响应于致动器的用于降低照明装置的强度水平的致动而执行一个或多个照明装置的相对控制并提供相对反馈的示例消息流的通信序列图。
图14是示出可响应于致动部分的一次或多次致动而执行的示例过程的流程图。
图15是示出可响应于旋转部分的旋转而执行的示例过程的流程图。
图16是示出可在旋转部分正在被旋转(例如,旋转会话)时执行的示例过程的流程图。
图17是示出用于经由状态指示器提供反馈的示例过程的示例流程图。
图18是示出可响应于接收到按钮按下消息而执行的示例过程的流程图。
图19是示出可响应于接收到两次按下消息而执行的示例过程的流程图。
图20是示出可响应于接收到开始旋转消息而执行的示例过程的流程图。
图21是示出可响应于接收到旋转更新消息而执行的示例过程的流程图。
图22是示出可响应于接收到结束旋转消息而执行的示例过程的流程图。
图23是示例负载控制装置的框图。
图24是示例控制器装置的框图。
图25是示例网络装置的框图。
图26是示例集线器装置的框图。
具体实施方式
图1A和图1B描绘了可实现一个或多个消息类型以用于传达消息(例如,数字消息)的负载控制系统100的示例。如图1A所示,负载控制系统100可包括各种控制装置,诸如控制器装置和/或负载控制装置。控制器装置可向负载控制装置发送数字消息,以致使负载控制装置控制从AC电源102提供到负载控制系统100中的电负载的电力量。
负载控制装置可控制房间和/或建筑物内的电负载。每个负载控制装置可能够响应于来自控制器装置的通信而直接地控制提供到电负载的电力量。示例负载控制装置可包括照明装置112a、112b和/或照明装置122(例如,灯泡、镇流器、LED驱动器等中的负载控制装置)。照明装置可为照明负载本身或者包括照明负载和照明负载控制器的装置。
控制器装置可通过向负载控制装置传输数字消息来间接地控制提供到电负载的电力量。数字消息可包括控制指令(例如,负载控制指令)或者致使负载控制装置确定用于控制电负载的负载控制指令的另一个指示。示例控制器装置可包括远程控制装置116。控制器装置可包括有线或无线装置。
控制装置(例如,控制器装置和/或负载控制装置)可经由有线和/或无线通信彼此通信和/或与其他装置通信。控制装置可使用无线信号中的数字消息进行通信。例如,控制装置可经由射频(RF)信号106进行通信。RF信号106可经由RF通信协议(例如,
照明装置122可安装在诸如灯(例如,台灯)的插接式装置124中。插接式装置124可在AC电源102与照明装置122之间以串联电连接耦合。插接式装置124可插入到由AC电源102供电的电插座126中。插接式装置124可插入电插座126或单独的插接式控制装置中,所述单独的插接式控制装置插入到电插座126中并被配置为控制递送到照明装置122的电力。
照明装置112a、112b可由壁挂式负载控制装置110控制。尽管在图1A中示出了照明装置112a、112b,但可实现壁挂式负载控制装置110和/或AC电源102可支持的任何数量的照明装置。壁挂式负载控制装置110可在AC电源102与照明装置112a、112b之间以串联电连接耦合。壁挂式负载控制装置110可包括机械开关111(例如,先前安装的照明开关),所述机械开关可响应于切换致动器(未示出)的致动而断开和闭合,以用于控制从AC电源102递送到照明装置112a、112b的电力(例如,用于打开和关闭照明装置112a、112b)。照明装置112a、112b可安装在相应的安装于天花板的筒灯灯具114a、114b或其他安装到另一个表面的照明灯具中。壁挂式负载控制装置110可适于壁挂在标准电壁箱中。
远程控制装置116可被配置为经由RF信号106传输消息以用于控制照明装置112a、112b。例如,远程控制装置116可被配置为经由RF信号106将消息传输到在远程控制装置的无线通信范围内的负载控制装置(例如,照明装置112a、112b)。远程控制装置116可由有限电源供电(例如,电池供电)。
远程控制装置116可为安装在机械开关111的切换致动器上的改型远程控制装置。远程控制装置116可以被配置为将机械开关111的切换致动器维持在“开”位置(例如,通过在处于“开”位置时覆盖开关),以维持从AC电源102到照明装置112a、112b的电力流动。另外,远程控制装置116可安装到诸如墙壁的另一个结构(例如,除了机械开关111的切换致动器外),可附接到位于水平表面上的基座,或者可为手持的。此外,壁挂式负载控制装置110可包括壁挂式远程控制装置,所述壁挂式远程控制装置替代先前安装的机械开关111并且可被配置为用作远程控制装置116以控制照明装置112a、112b(例如,通过经由RF信号106传输消息)。这种壁挂式远程控制装置可从AC电源102获取电力。
远程控制装置116可包括可被致动(例如,朝向机械开关111推入)的致动部分117(例如,“切换”按钮)和可被旋转(例如,相对于机械开关111)的致动部分118(例如,旋钮)。远程控制装置116可被配置为响应于致动部分117的致动(例如,按下)而传输消息,所述消息包括用于打开和关闭照明装置112a、112b、122的命令。类似地,远程控制装置116可被配置为响应于旋转部分118的致动(例如,旋转)而传输消息,所述消息包括用于调整照明装置112a、112b、122的强度水平(例如,照明水平或亮度)的命令。该消息可包括渐变时间T
响应于远程控制装置116(例如,响应于远程控制装置116的致动部分117的致动),可打开或关闭照明装置112a、112b,或者可调整强度水平。例如,照明装置112a、112b可通过在远程控制装置116处识别的切换事件而切换开或关。切换事件可为在远程控制装置116处识别的用户事件。可致动远程控制装置116的致动部分117以使照明装置112a、112b切换开或关。可旋转远程控制装置116的旋转部分118以调整照明装置112a、112b的强度水平。当远程控制装置116的旋转部分118被转动预定义量或预定义时间,和/或远程控制装置116的致动部分117被致动时,可识别出切换事件。照明装置112a、112b的强度水平可通过分别在一个方向或另一个方向上旋转远程控制装置116的旋转部分118来增大或减小。尽管在图1A和图1B中被示出为包括旋钮,但远程控制装置116可包括可由用户致动的扳钮开关、用户可在其上轻扫手指的线性控件、升/降滑块、翘板开关,或者能够接收用户接口事件作为命令的另一种类型的控件。
远程控制装置116可在视觉指示器(诸如状态指示器119)上向远程控制装置116的用户提供反馈(例如,视觉反馈)。状态指示器119可提供不同类型的反馈。反馈可包括指示以下项的反馈:用户的致动或其他用户接口事件、由远程控制装置116控制的电负载的状态,和/或由远程控制装置116控制的负载控制装置的状态。可响应于用户接口事件和/或响应于接收到的指示负载控制装置和/或电负载的状态的消息来显示反馈。
状态指示器119可由一个或多个发光二极管(LED)照亮以用于提供反馈。状态指示器119可为包括在远程控制装置116的整个周边或其一部分周围的灯条。状态指示器119还可或可选地为远程控制装置116上的线路中的灯条,例如,诸如当远程控制装置扳钮开关或线性控件时。
反馈的示例类型可包括整个状态指示器119的照亮(例如,到不同的强度水平)、使状态指示器119中的一个或多个LED闪烁或脉冲、改变状态指示器119上的一个或多个LED的颜色,和/或照亮状态指示器119中的一个或多个LED的不同区段以提供动画(例如,用于升高和降低强度水平的顺时针和逆时针动画)。状态指示器119上的反馈可指示电负载或负载控制装置的状态,诸如灯(例如,照明装置112a、112b、122)的强度水平、音频装置的音量水平、电动窗帘的遮光水平,和/或风扇或以不同速度操作的其他类似类型的装置的速度。状态指示器119上的反馈可基于不同预设的选择来改变。例如,可在状态指示器119上照亮一个或多个不同的LED以识别不同的预设(例如,照明装置112a、112b、122的预设强度水平和/或负载控制装置的其他预设配置)。
状态指示器119或其一部分可打开或关闭以指示照明装置112a、112b、122中的一个或多个的状态。例如,状态指示器119可关闭以指示照明装置112a、112b、122处于关状态。整个状态指示器或其部分可打开以指示照明装置112a、112b、122处于开状态。状态指示器119的打开的部分可指示照明装置112a、112b、122中的一个或多个的强度水平。例如,当照明装置112a、112b、122处于50%的强度水平时,状态指示器119的50%可打开以反映照明装置112a、112b、122的强度水平。
远程控制装置116可经由RF信号106传输数字消息,以控制照明装置112a、112b、122。远程控制装置116可被配置为传输用于打开照明装置112a、112b、122的开命令(例如,“开”事件)。开命令可致使照明装置112a、112b、122改变为最大强度水平(例如,100%)、改变为预设(例如,预定)强度水平,和/或改变为先前的强度水平(例如,“开”事件)。例如,开命令可致使照明装置112a、112b、122打开至由场景(例如,开场景)定义的相应预设强度水平。场景可描述负载控制系统中的一个或多个负载控制装置的状态。例如,场景可描述负载控制装置中的照明装置的强度水平。如果用户指示要打开某一场景,则照明装置可改变为由该场景定义的强度水平。另外,远程控制装置116可被配置为传输用于关闭照明装置112a、112b、122(例如,0%)的关命令。此外,远程控制装置116可被配置为传输用于切换照明装置112a、112b、122的状态的切换命令。切换命令可致使照明装置112a、112b、122的状态从关闭变为打开(例如,“开”事件),或者从打开变为关闭(例如,“关”事件)。
“开”事件和/或“关”事件的强度水平可存储在照明装置112a、112b、122处,并且当在远程控制装置116处接收到“开”事件或“关”事件的发生的指示时,照明装置可改变为该强度水平。当远程控制装置116在一个方向上旋转预定义距离或时间时,数字消息可引起“开”事件。作为示例,当远程控制装置116被识别为旋转了一段时间(例如,10毫秒(msec)、100msec等)时,远程控制装置116可传输数字消息。当远程控制装置116在相反的方向上旋转预定义距离或时间时,数字消息可指示“关”事件。当远程控制装置116的致动部分117被致动时,数字消息可指示“开”事件或“关”事件。
远程控制装置116可被配置为使用绝对控制来调整照明装置112a、112b、122的强度水平,以便将照明装置112a、112b、122的强度水平控制到绝对水平(例如,特定的水平)。例如,远程控制装置116可传输包括移动到某水平命令(例如,转到某水平或转到命令)的数字消息,所述命令识别照明装置可改变到的强度水平。移动到某水平命令可包括可在照明装置处改变强度水平的时间量(例如,渐变时间T
响应于远程控制装置116处的用户接口事件(例如,致动、旋转、手指轻扫等)或接近感测事件(例如,感测电路感测到在远程控制装置116附近的占用者),远程控制装置116可确定可从其控制照明装置112a、112b、122中的一个或多个的强度水平的起点(例如,动态起点)。旋转部分118的每次旋转可致使远程控制装置116确定可从其执行控制的动态起点。响应于用户接口事件和/或接近感测事件(例如,感测电路感测到在远程控制装置116附近的占用者),远程控制装置116可查询照明装置112a、112b、122的当前状态(例如,在从睡眠模式唤醒之后)。照明装置112a、112b、122中的一个或多个的当前状态可用于设置远程控制装置116可从其执行控制的动态起点。例如,远程控制装置116可将旋转部分118的动态起点设置为第一照明装置112a、112b、122中的响应于该查询的第一者或预定义照明装置112a、112b、122的当前强度水平(例如,开、关、10%、20%等)。
在另一个示例中,远程控制装置116可基于多个照明装置112a、112b、122的强度水平来设置旋转部分118的动态起点。例如,远程控制装置116可将旋转部分118的动态起点设置为照明装置112a、112b、122的平均强度水平(例如,开、关、10%、20%等)或者照明装置112a、112b、122中的大多数的共同强度水平(例如,开、关、10%、20%等)。例如,远程控制装置116可在旋转部分118顺时针旋转以升高照明装置的强度水平时将旋转部分118的动态起点设置为照明装置112a、112b、122的最大水平,或者在旋转部分118逆时针旋转以降低照明装置的强度水平时设置为照明装置112a、112b、122的最小水平。状态指示器119可被照亮作为反馈以将动态起点反映给用户。例如,远程控制装置116可照亮状态指示器119的一部分,所述部分反映被设置为动态起点的强度水平。
远程控制装置116可基于用户接口事件来从动态起点计算强度水平的增大或减小。例如,远程控制装置116可基于旋转部分118被转动的距离或时间量来计算强度水平的增大或减小。从用户与旋转部分118的初始交互的点开始的旋转可用于识别强度水平从动态起点的增大或减小。当远程控制装置116包括线性控件时,远程控制装置116可基于用户在线性控件上上或下轻扫手指的距离或时间量来计算强度水平的增大或减小。从用户与线性控件的初始交互的点开始的用户的手指轻扫可用于识别强度水平从动态起点的增大或减小。
更新的强度水平可根据用户的初始交互来计算并存储在远程控制装置116处。当远程控制装置116使用绝对控制时,更新的强度水平可被包括在从远程控制装置116传输到照明装置112a、112b、122的移动到某水平命令中。
当远程控制装置116使用绝对控制时,由状态指示器119显示的视觉反馈可在移动到某水平命令中的信息中提供或从中得出。例如,远程控制装置116可在状态指示器119中反映在移动到某水平命令中传输的强度水平。
远程控制装置116可传输被配置为当旋转部分118在某一方向上(例如,顺时针)旋转时增大照明装置112a、112b、122的强度水平的数字消息。如先前提及,远程控制装置116可被配置为使用绝对控制来将照明装置112a、112b、122的强度水平调整到绝对水平。另外或可选地,远程控制装置116可被配置为使用相对控制来调整照明装置112a、112b、122的强度水平,以将照明装置112a、112b、122的强度水平调整相对量。例如,当远程控制装置116在相反的方向上(例如,逆时针方向)旋转时,远程控制装置116可传输被配置为降低照明装置112a、112b、122的强度水平的数字消息。数字消息可包括以某速率移动命令,所述命令可致使照明装置112a、112b、122将其相应的强度水平改变预定义量。以某速率移动命令可包括渐变速率(例如,可在照明装置处改变强度水平的速率)。以某速率移动命令可致使照明装置112a、112b、122保持其相对或成比例的强度水平和/或相应的强度水平的差异。远程控制装置116可在旋转预定义距离或预定义时间时发送数字消息以将强度水平增大或减小预定义量。增大或减小的量可在数字消息中指示,或者可在照明装置112a、112b、122处预定义。
经由RF信号106传输的数字消息可为多播消息。例如,包括移动到某水平命令的数字消息可作为多播消息来传输。多播消息可包括用于控制作为多播组的一部分的照明装置112a、112b、122的组标识符。照明装置112a、112b、122在其与组标识符相关联时(例如,通过将组标识符存储在其上)可为多播组的一部分,以辨识向该组传输的多播消息。与组标识符相关联的照明装置112a、112b、122可辨识多播消息并且根据多播消息中的命令来控制对应的照明负载。照明装置112a、112b、122可转发具有组标识符的多播消息,以由与该组标识符相关联的其他照明装置进行识别和负载控制。
该组可在负载控制系统100的调试或配置时形成。当远程控制装置116处于关联模式(例如,在选择一个或多个按钮后进入)时,远程控制装置116可生成组标识符并将该组标识符发送到照明装置112a、112b、122和/或集线器装置。存储组标识符的装置可为与远程控制装置116相关联的装置组的部分,并且可响应于组消息。
远程控制装置116可经由RF信号106将数字消息作为多播消息和/或单播消息传输。例如,包括以某速率移动命令或移动到某水平命令的数字消息可作为单播消息传输。单播消息可从远程控制装置116直接地或经由跃点发送到照明装置112a、112b、122中的每一个。远程控制装置116可将单播消息单独地发送到与远程控制装置116相关联的照明装置112a、112b、122中的每一个,以执行负载控制。远程控制装置116可将与其相关联的照明装置112a、112b、122中的每一个的唯一标识符存储在存储器中。远程控制装置116可为每个照明装置112a、112b、122生成单独的单播消息,并且将单播消息独立地寻址到照明装置112a、112b、122。单播消息还可包括远程控制装置116的唯一标识符。照明装置112a、112b、122可通过识别存储在关联数据集中的其本身的唯一标识符和/或远程的对应标识符来识别传达给它们的单播消息。照明装置112a、112b、122可根据包括其本身的唯一标识符和/或相关联装置(诸如远程控制装置116)的唯一标识符的数字消息中的指令(例如,负载控制指令)进行操作。
由于单个消息可一次传输到多个照明装置,诸如照明装置112a、112b、122,因此可从远程控制装置116更高效地传达多播消息。多播消息可能更可靠,因为多播消息可被接收装置重传,使得因干扰或信号强度而未能接收到消息的装置可在消息被重传后接收到多播消息。多播消息中的负载控制指令也可同时或几乎同时被多个照明装置(诸如照明装置112a、112b、122)接收和实现,其中因时延差异而引起较小延迟,因为在相同无线范围内的一组装置处接收单个消息。可通过确定照明装置中的每一个处的时延并通过将负载控制指令的实现延迟时延差异以补偿每个照明装置处的时延差异来克服时延差异。单播消息中的负载控制指令可在不同的时间由多个照明装置112a、112b、122接收和实现,这可能是由装置之间的时延差异和/或处理和传输每个消息的时间引起的,因为不同的消息传输到无线范围内的每个装置。
当用户在一个方向或另一个方向上将远程控制装置116转动预定义距离或时间时,远程控制装置116可传输包括以某速率移动命令的数字消息(例如,作为单播消息和/或多播消息),以便按预定义增量增大或减小照明装置112a、112b、122的强度水平。当用户继续转动远程控制装置116时,远程控制装置116可继续向照明装置112a、112b、122传输数字消息。例如,远程控制装置116可识别预定义距离或预定义时间的旋转,并且发送一个或多个数字消息以指示照明装置112a、112b、122各自增大百分之十(10%)。远程控制装置116可识别预定义距离或时间的继续旋转,并且发送数字消息以指示照明装置112a、112b、122再次增大百分之十(10%)。
远程控制装置116还可或者可选地发送针对移动到某水平命令(例如,“开”命令、“关”命令、切换命令等)的数字消息,以打开/关闭照明装置112a、112b、122。当检测到开事件或关事件时,远程控制装置116可向照明装置112a、112b、122传输一个或多个数字消息。例如,远程控制装置116可识别旋转或致动并且发送数字消息以指示照明装置112a、112b、122打开/关闭。远程控制装置116可通过在打开之后发送以某速率移动命令来进行操作。例如,远程控制装置116可在打开之后识别预定义距离或时间的旋转,并且发送数字消息以指示照明装置112a、112b、122按预定义强度水平(例如,大约10%)增大/减小。
本文描述的实施方案不限于远程控制装置,而是也可以相同或类似方式使用其他控制器装置。例如,实施方案可包括如本文所述的传达数字消息的有线控制装置和/或插入式控制装置。
图1B示出了具有其他装置的负载控制系统100的示例。例如,负载控制系统100可包括其他控制装置,诸如控制器装置和/或负载控制装置。负载控制装置可能够基于从控制器装置接收的数字消息来控制提供给相应电负载的电力量,所述控制器装置可为输入装置。数字消息可包括负载控制指令或者致使负载控制装置确定用于控制电负载的负载控制指令的另一指示。
负载控制装置的示例可包括电动窗帘130和/或照明装置112a、112b、122,但可实现其他负载控制装置。控制器装置可包括远程控制装置150、占用传感器160、日光传感器170和/或网络装置190,但可实现其他控制器装置。控制器装置可以类似于如本文所述的远程控制装置116的配置来执行通信。负载控制装置可以类似于如本文所述的照明装置112a、112b、122的配置来执行通信。
负载控制装置可经由无线信号,例如射频(RF)信号106(例如,
电池供电的远程控制装置150可包括一个或多个致动器152(例如,开按钮、关按钮、升高按钮、降低按钮或预设按钮中的一个或多个)。电池供电的远程控制装置150可响应于致动器152中的一个或多个的致动而传输RF信号106。电池供电的远程控制装置150可为手持的。电池供电的远程控制装置150可竖直地安装到墙壁,或者支撑在基座上以安装在桌面上。电池供电的远程控制装置的示例在2012年12月11日发布的标题为WIRELESSBATTERY-POWERED REMOTE CONTROL HAVING MULTIPLE MOUNTING MEANS的共同转让的美国专利号8,330,638和2012年11月15日公布的名称为CONTROL DEVICE HAVING A NIGHTLIGHT的美国专利申请公布号2012/0286940中更详细地描述,所述公布的全部公开内容通过引用并入在此。
远程控制装置150可为能够经由无线通信控制负载控制装置的无线装置。远程控制装置150可附接到墙壁或从墙壁拆卸。远程控制装置的示例在1993年9月28日发布的名称为LIGHTING CONTROL DEVICE的美国专利号5,248,919;2013年6月25日发布的名称为WIRELESS BATTERY-POWERED REMOTE CONTROL WITH LABEL SERVING AS ANTENNA ELEMENT的美国专利号8,471,779;以及2014年5月15日公布的名称为WIRELESS LOAD CONTROLDEVICE的美国专利申请公布号2014/0132475中更详细地描述,所述公布的全部公开内容通过引用并入在此。
占用传感器160可被配置为检测安装有负载控制系统100的空间中的占用和/或空缺状况。占用传感器160可响应于检测到占用或空缺状况而经由RF通信信号106向负载控制装置传输数字消息。占用传感器160可用作空缺传感器,使得响应于检测到空缺状况而传输数字消息(例如,可响应于检测到空缺状况而不传输数字消息)。占用传感器160可进入关联模式,并且可响应于占用传感器160上的按钮的致动而经由RF通信信号106传输关联消息。具有占用传感器和空缺传感器的RF负载控制系统的示例在2011年8月30日发布的名称为RADIO-FREQUENCY LIGHTING CONTROL SYSTEM WITH OCCUPANCY SENSING的共同转让的美国专利号8,009,042;2012年6月12日发布的名称为METHOD AND APPARATUS FORCONFIGURING A WIRELESS SENSOR的美国专利号8,199,010;以及2012年7月24日发布的名称为BATTERY-POWERED OCCUPANCY SENSOR的美国专利号8,228,184中更详细地描述,所述专利的全部公开内容通过引用并入在此。
日光传感器170可被配置为测量安装有负载控制系统100的空间中的总光水平。日光传感器170可经由RF通信信号106传输包括测量到的光水平的数字消息,以响应于测量到的光水平而控制负载控制装置。日光传感器170可进入关联模式,并且可响应于日光传感器170上的按钮的致动而经由RF通信信号106传输关联消息。具有日光传感器的RF负载控制系统的示例在2013年4月2日发布的名称为METHOD OF CALIBRATING A DAYLIGHT SENSOR的共同转让的美国专利号8,410,706和2013年5月28日发布的名称为WIRELESS BATTERY-POWERED DAYLIGHT SENSOR的美国专利号8,451,116中更详细地描述,所述专利的全部公开内容通过引用并入在此。
电动窗帘130可安装在窗户的前面,以用于控制进入安装有负载控制系统100的空间的日光量。电动窗帘130可包括例如蜂窝式遮阳帘、卷帘、帏帐、罗马帘、百叶帘、百叶窗、百折帘、张拉的卷帘系统或其他合适的电动窗户覆盖物。电动窗帘130可包括用于调整电动窗饰130的覆盖材料134的位置以便控制进入空间的日光量的马达驱动单元132。电动窗帘130的马达驱动单元132可具有RF接收器和安装在电动窗帘130的马达驱动单元132上或从其延伸的天线。马达驱动单元132可响应于数字消息以增大或减小覆盖材料134的水平。电动窗帘130的马达驱动单元132可由电池供电,或者可从外部直流(DC)电源接收电力。电池供电的电动窗帘的示例在2015年2月10日发布的名称为MOTORIZED WINDOW TREATMENT的共同转让的美国专利号8,950,461和2015年8月25日发布的名称为BATTERY-POWERED ROLLERSHADE SYSTEM的美国专利号9,115,537中更详细地描述,所述专利的全部公开内容通过引用并入在此。
控制器装置传输的数字消息可包括命令和/或识别信息,诸如与传输控制器装置相关联的序列号(例如,唯一标识符)。在负载控制系统100的配置过程期间,控制器装置中的每一个可与照明装置112a、112b、122和/或电动窗帘130相关联,使得照明装置112a、112b、122和/或电动窗帘130可响应于控制器装置经由RF信号106传输的数字消息。在配置过程期间将无线控制装置相关联的示例在2008年5月15日公布的名称为RADIO-FREQUENCYLIGHTING CONTROL SYSTEM的共同转让的美国专利申请公布号2008/0111491和2016年6月14日发布的名称为TWO-PART LOAD CONTROL SYSTEM MOUNTABLE TO A SINGLE ELECTRICALWALLBOX的美国专利号9,368,025中更详细地描述,所述专利的全部公开内容通过引用并入在此。
负载控制系统100可包括集线器装置180(例如,系统桥或系统控制器),所述集线器装置被配置为使得能够与网络182(例如,无线或有线局域网(LAN))进行通信。例如,集线器装置180可经由有线数字通信链路184(例如,以太网通信链路)连接到网络路由器(未示出)。网络路由器可允许与网络182的通信,例如,以访问互联网。集线器装置180可例如使用无线技术(诸如
可经由一种或多种协议来传输RF信号106。例如,远程控制装置116和远程控制装置150可经由不同于其他装置的另一种协议(例如,
集线器装置180可用作负载控制系统100的中央控制器,和/或在负载控制系统的控制装置(例如,照明装置、电动窗帘等)与网络182之间中继数字消息。集线器装置180可从控制器装置接收数字消息,并且配置该数字消息以便传达到负载控制装置。例如,集线器装置180可配置多播消息和/或单播消息以进行传输,如本文所述。集线器装置180可位于负载控制系统100的本地或者位于远程位置。尽管集线器装置180被示为单个装置,但负载控制系统100可包括多个集线器和/或其功能可分布在多个装置上。
负载控制系统100可包括网络装置190,诸如智能电话(例如,
网络装置190可包括视觉显示器192。视觉显示器192可包括触摸屏,所述触摸屏可包括例如在视觉显示器上移位的电容式触摸板,使得视觉显示器可显示可由用户致动的软按钮。除了视觉显示器192外,网络装置190还可包括多个硬按钮,例如,物理按钮(未示出)。网络装置190可下载产品控制应用程序,以允许网络装置190的用户控制负载控制系统100。响应于所显示的软按钮和/或硬按钮的致动,网络装置190可通过本文描述的无线通信向负载控制装置和/或集线器装置180传输数字消息。
负载控制系统100的操作可使用集线器装置180和/或网络装置190来编程和配置。用于无线负载控制系统的配置过程的示例在2014年9月18日公布的名称为COMMISSIONINGLOAD CONTROL SYSTEMS的共同转让的美国专利申请公布号2014/0265568中更详细地描述,所述公布的全部公开内容通过引用并入在此。
照明装置112a、112b、122可各自被包括在与诸如远程控制装置116的公共控制装置相关联的一组照明装置中。例如,照明装置112a、112b、122中的每一个可在关联模式期间存储远程控制装置116的唯一标识符,以使得能够通过来自远程控制装置116的包括控制指令的数字消息来控制照明装置112a、112b、122。集线器装置180可在关联模式期间存储照明装置112a、112b、122中的每一个与远程控制装置116之间的关联。关联信息可被集线器装置180用来将数字消息路由到照明装置112a、112b、122,或者照明装置112a、112b、122可直接地从远程控制装置116接收数字消息。
远程控制装置116可被配置为经由集线器装置180向照明装置112a、112b、122传输消息。例如,远程控制装置116可被配置为向集线器装置180传输单播消息。集线器装置180可被配置为响应于从远程控制装置116接收到单播消息而向远程控制装置116传输确认消息。集线器装置180可被配置为响应于从远程控制装置116接收的单播消息而向照明装置112a、112b、122传输单播和/或多播消息,以控制照明装置。例如,远程控制装置116可传输包括切换命令或开/关命令(例如,“开”命令或“关”命令)的消息,以用于控制照明装置112a、112b、122,以便将照明装置112a、112b、122从“开”状态切换到“关”状态或反之亦然。远程控制装置116可向集线器装置180传输包括切换命令或开/关命令的单播消息,所述集线器装置可传输在照明装置112a、112b、122中的每一个处接收到的多播消息。远程控制装置116可向集线器装置180传输包括移动到某水平命令或以某速率移动命令的单播消息,所述集线器装置可传输独立地指向照明装置112a、112b、122中的每一个的单播消息。
远程控制装置116可将照明装置的强度水平用作对该组照明装置组112a、112b、122执行调光的起点(例如,动态起点)。例如,响应于来自远程控制装置116的查询,照明装置112a可以其处于10%的强度水平进行响应。远程控制装置116可将由照明装置122识别的强度水平设置为可执行对该组照明装置112a、112b、122的强度水平的控制的动态起点。远程控制装置116可识别继续旋转以将强度水平增大附加的20%。远程控制装置116可将该20%添加到10%的动态起点,所述动态起点被指示为响应于来自远程控制装置116的先前查询消息的照明装置112a的当前强度水平。远程控制装置116可向该组照明装置112a、112b、122发送数字消息,以将该组照明装置112a、112b、122控制到30%的绝对强度水平。数字消息可包括移动到某水平(例如,转到某水平)命令,所述命令被配置为将照明装置112a、112b、122中的每一个控制到30%强度水平。照明装置112a、112b、122中的每一个可接收数字消息(例如,作为单播消息或多播消息),并且被控制到30%的绝对强度水平,除非照明装置已经处于指示的强度水平。当该组照明装置112a、112b、122处于相同的状态时,该组照明装置112a、112b、122可作为一组进行控制。例如,该组照明装置112a、112b、122可一起从10%被控制到30%。当该组照明装置112a、112b、122的状态不同步时,可不同地控制照明装置112a、112b、122以达到指示的强度水平。例如,高于指示的强度水平的照明装置112a、112b、122可减小强度水平以满足指示的强度水平。低于指示的强度水平的照明装置112a、112b、122可增大强度水平以满足指示的强度水平。响应于来自远程控制装置116的数字消息,已经处于数字消息中指示的状态的照明装置112a、112b、122可保持不变。
照明装置112a、112b、122可响应于接收到命令而从一个强度水平渐变到另一个强度水平(例如,在渐变时间T
集线器装置180可用作父装置(例如,主装置),其可被配置为监测诸如照明装置112a、112b、122的子装置(例如,从装置)的状态,并且基于从装置的状态来确定响应于用户接口事件要传输的适当命令。尽管集线器装置180在本文中可被描述为用于控制一组照明装置的主装置,但其他控制装置(例如,照明装置112a、112b、122、远程控制装置150、占用传感器160、日光传感器170、网络装置190、电动窗帘132、远程计算装置等中的一个)可被指派为如本文针对集线器装置180所描述那样操作的主装置。当照明装置112a、112b、122被指派为主装置时,照明装置112a、112b、122可能已经知道其本身的状态,但可监测其他从装置的状态。尽管其他装置可用作主装置,但它们仍可经由集线器装置180进行通信。
集线器装置180可在负载控制系统100中实现之后保持跟踪照明装置112a、112b、122中的每一个的开/关状态。在最初实现到负载控制系统中后,集线器装置180可向照明装置112a、112b、122查询其当前开/关状态。查询消息可作为多播消息或单独的单播消息发送到照明装置112a、112b、122中的每一个。照明装置112a、112b、122可返回可本地存储在其上的当前开/关状态。集线器装置180可识别传达到照明装置112a、112b、122的命令,并且在存储器中维持照明装置112a、112b、122的当前开/关状态。可监测传达到照明装置112a、112b、122以控制开/关状态的数字消息,以确定当前开/关状态,而无需发送初始查询消息。集线器装置180可在任何时候(例如,在照明装置112a、112b、122也被供电的时候)被供电和/或唤醒,使得集线器装置能够通过监听照明装置传输的消息来监测照明装置的状态。另外,集线器装置180可进入睡眠模式并且周期性地唤醒,直到向照明装置112a、112b、122传输查询消息来确定照明装置的开/关状态。
当集线器装置180从远程控制装置116接收到切换事件的指示时,集线器装置180可选择要向照明装置112a、112b、122发送的命令或是否发送命令。集线器装置180处的决定可以是基于照明装置112a、112b、122的当前开/关状态。集线器装置180可识别整组照明装置112a、112b、122的开/关状态是否一致。如果整组照明装置112a、112b、122的开/关状态是一致的,则集线器装置180可向照明装置112a、112b、122发送切换命令或者“开”命令或“关”命令,以切换该组照明装置112a、112b、122的开/关状态。
响应于“开”命令或“关”命令而改变开/关状态的照明装置112a、112b、122可向集线器装置180发送状态更新消息以指示开/关状态的变化。集线器装置180可从响应于接收到的“开”命令或接收到的“关”命令而改变状态的照明装置112a、112b、122接收状态更新消息。未能响应于来自集线器装置180的命令而改变开/关状态的照明装置可能是无响应的。例如,集线器装置180可向照明装置112a、112b、122发送“关”命令,并且照明装置122可将开/关状态更新为“关”状态。照明装置122可向集线器装置180发送响应消息以指示状态的变化。集线器装置180可存储更新的状态和/或确认无响应装置的状态。可选地,集线器装置180可在发送命令之后存储照明装置122的更新的状态。由于集线器装置180可维持照明装置112a、112b、122的开/关状态,因此远程控制装置116可在响应于触发事件而传输消息之后睡眠。
图2A至图2D示出了具有可被照亮以提供本文描述的反馈的状态指示器203的远程控制装置202的前视图。远程控制装置202可包括致动部分204和旋转部分206。远程控制装置202可包括内部旋转位置感测电路(未示出),例如,磁性感测电路,诸如霍尔效应传感器电路,以用于确定旋转部分206的旋转速度和旋转方向。远程控制装置202可包括一个或多个磁性元件,例如,圆形磁性元件,诸如耦合到旋转部分206的内表面的磁环(未示出)。磁环可包括多个交替的正北极区段和负南极区段。旋转位置感测电路可被配置为在磁环的正北极区段和负南极区段经过旋转位置感测电路时生成具有上升边沿和下降边沿的一个或多个旋转位置感测信号。远程控制装置202可被配置为响应于旋转位置感测信号的边沿而确定旋转部分206的位置和/或旋转量。
如图2A所示,远程控制装置202可被配置为在远程控制装置202已经被激活之后提供反馈。例如,远程控制装置202可被配置为在检测到在控制装置附近的用户时和/或在远程控制装置202的用户接口上检测到用户接口事件时提供反馈。用户接口事件可为致动部分204的致动或旋=转部分206的旋转。反馈可指示远程控制装置202响应于激活而正传输无线通信信号(例如,RF信号)。在触发反馈的事件的持续时间内(例如,在旋转部分206被旋转时),远程控制装置202可保持状态指示器203被照亮。远程控制装置202可被配置为在事件之后的几秒钟(例如,1至2秒)内继续照亮状态指示器203,并且然后关闭状态指示器203以保存电池寿命。
状态指示器203可不点亮(例如,如图2A所示),以提供与之相关联的负载控制装置为关的反馈。状态指示器203中的LED可在与之相关联的负载控制装置为开或检测到用户接口事件时打开至全强度水平(例如,如图2B所示)。例如,负载控制装置可响应于通过致动致动部分204或旋转旋转部分206辨识出的切换事件而打开。状态指示器203中的LED可打开至全强度水平,以反映由负载控制装置控制的负载的强度水平。例如,状态指示器203可反映用于灯的高端调光水平、用于遮光帘的全开或全关位置、用于音频装置的最大音量水平、用于风扇的全速等。当致动部分204被按下时,状态指示器203可在图2A和图2B所示的两个状态之间闪烁,以提供致动部分204被按下且远程控制装置202正在工作的反馈。
状态指示器203可在旋转部分206旋转时被照亮以便以不同的方式(例如,不同的强度水平和/或颜色)提供反馈。例如,如图2A所示,状态指示器203可在旋转部分206顺时针或逆时针旋转(例如,以增大或减小照明负载的强度、遮光帘水平、风扇速度、音量等)时被完全照亮至并保持在最大灯条强度L
类似地,状态指示器203可用不同的颜色照亮以指示不同的用户输入和/或电负载或负载控制装置的状态。例如,状态指示器203可用不同的颜色照亮以指示照明负载的强度正在升高或降低、遮光帘水平正在升高或降低和/或音量水平正在升高或降低。状态指示器203可在强度水平升高时用红色照亮并且在强度水平降低时用蓝色照亮。
状态指示器203可响应于致动部分204的致动而被照亮,以指示电负载被切换开或关。例如,状态指示器203可在照明负载被切换开或关时被照亮以显示动画(例如,心跳动画),以提供致动部分204已经被致动的简单反馈。图3示出了状态指示器203的强度相对于时间的示例曲线,以便生成动画。例如,状态指示器203的强度可在一段时间内增大到第一强度302(例如,第一中等水平灯条强度L
状态指示器203可被照亮以进一步指示正在供应到电负载的电力量。例如,代替照亮状态指示器203的整个灯条,远程控制装置202可照亮状态指示器203的一部分,并且根据用户施加的控制来调整被照亮部分的长度。例如,当状态指示器203的灯条被配置为具有圆形形状时,被照亮部分可响应于用户接口事件和/或电负载的状态的调整而绕灯条的圆周扩展或收缩。远程控制装置202可调整正在照亮状态指示器203的被照亮部分的端点的LED的强度,以提供对被照亮部分的端点的调整,如在本文更详细地描述。
图4示出了当状态指示器203被照亮以在一个方向上扩展和收缩以便提供指示电负载的强度的反馈(例如,高级反馈)时的远程控制装置202的正视图。例如,图4所示的顺序可用于示出随着强度水平增大(例如,贯穿图4所示的照亮配置从左向右移动)或减小(例如,贯穿图4所示的照亮配置,从右向左移动),照明负载或音频装置的音量的强度水平。
远程控制装置202可包括被配置为照亮状态指示器203的多个光源(例如,LED)。响应于远程控制装置202的用于调整照明负载的强度水平或音频装置的音量的致动,远程控制装置202可照亮光源的子集,使得状态指示器203的一部分400被照亮以指示对应于致动的强度水平。被照亮部分400可在起点402处(例如,在状态指示器203的底部处,如图4所示)开始并且在端点404处(例如,沿着状态指示器203的圆周)结束。被照亮部分400的长度和/或强度水平可指示照明负载的强度水平或音频装置的音量。光源的子集可被均匀地照亮至共同的强度水平。可选地,光源的子集可被照亮至不同的强度水平。例如,远程控制装置202可将状态指示器203的被照亮部分400的端点404照亮至比其余被照亮部分更高的强度水平,并且可朝向起点402减小被照亮部分的强度水平。例如,状态指示器203的被照亮部分400可显示从端点404处的最亮强度水平到起点402处的最暗强度水平的梯度。这样,用户仍然可基于被照亮部分的长度来接收反馈,但可消耗更少的电池电量来提供反馈。可选地,最暗强度水平可以在端点404与起点402之间。
为了说明,远程控制装置202可被配置为在照明负载或音频装置的音量的强度水平升高时增大被照亮部分400的长度(例如,致使被照亮部分的端点404在顺时针方向上移动,如图4所示)。远程控制装置202可被配置为在照明负载或音频装置的音量的强度水平降低时减小被照亮部分400的长度(例如,致使照亮部分的端点404在逆时针方向上移动,如图4所示)。这样,被照亮部分400可在照明负载或音频装置的音量的强度水平被调整时扩展和收缩。
被照亮部分400的大小可逐渐地增大和减小,或者在指示给定的强度水平的预定义段之间步进。例如,状态指示器203可在被照亮段之间步进以指示照明负载的当前强度水平为大约30%、大约60%和大约90%,但状态指示器可按具有相等或不相等的差异的任何数量的步长被照亮。当照明负载或音量处于全强度水平(例如,大约全强度水平)时,整个状态指示器203可被照亮。当远程控制装置202被配置为控制多个照明负载或音频装置,并且将多个负载的相应的强度水平设置为不同的值时,远程控制装置202可被配置为照亮状态指示器203以指示负载的相应的强度水平的平均值、指示最接近远程控制装置202的照明负载或音频装置的强度水平等。
在一些示例中,远程控制装置202可被配置为调整照亮被照亮部分400的端点404的光源的强度,以提供对端点404的位置的微调调整。例如,远程控制装置202可在1%与100%之间调整照亮端点404的光源的强度水平,以提供对端点404的位置的微调调整。为了说明,远程控制装置202可将状态指示器203照亮到指示由远程控制装置202控制的照明负载或音频装置的音量的强度水平为大约30%的长度。在那时,照亮端点404的光源的强度水平可设置为1%。在照明负载或音频装置的音量的强度水平进一步朝向40%调整时,远程控制装置202可在1%与100%之间以更细的粒度调整端点404的强度水平,以与在30%与40%之间的相应中间强度水平相对应。在照明负载或音频装置的音量的强度水平达到40%之后,远程控制装置202可照亮附加光源(例如,到1%的强度水平),以致使被照亮部分400的长度扩展。然后,在照明负载的强度水平朝下一个水平(例如,50%)进行调整时,远程控制装置202可在1%与100%之间调整现在照亮端点404的附加光源的强度水平。
远程控制装置202可被配置为在接收到用户接口事件以分别打开照明负载或音频装置后指示照明负载或音频装置的音量的最近已知强度水平。例如,在关闭照明负载或音频装置之前,远程控制装置202可在一段时间内在减小被照亮部分400的从端点404到起点402的长度的同时将强度水平存储在远程控制装置202的存储器中。随后,当远程控制装置202被致动以重新打开照明负载或音频装置时,远程控制装置202可照亮状态指示器203以增大被照亮部分400的长度,以便对应于在一段时间内先前存储的强度水平。
在本文描述的示例中,被照亮部分400的显示可被操纵远程控制装置202的用户的手指遮挡。例如,在用户旋转远程控制装置202的旋转部分206以调整照明负载或音频装置的音量的强度水平时,用户的手可挡住被照亮部分400的前缘(例如,端点404)。因此,用户可能无法确定被照亮部分是否响应于旋转部分206的旋转移动而扩展和收缩,以及电负载的强度水平是否被适当地调整。
远程控制装置202可控制状态指示器203被照亮的方式,以降低用户的动作可能干扰反馈指示的可能性。例如,远程控制装置202可被配置为致使被照亮部分400的端点404(例如,如图4所示)以比在旋转部分被旋转时旋转部分206的角速度更快或更慢的角速度移动。为了说明,用户可在某一时间单位内将旋转部分206旋转x度,以便调整照明负载或音频装置的音量的强度水平(例如,升高或降低)。作为响应,远程控制装置202可在相同的时间单位内致使被照亮部分400的端点404移动x+y或x-y度(例如,在顺时针或逆时针方向上),使得由端点404表示的被照亮部分400的前缘可比用户的手移动得更快(例如,在前面)或更慢(例如,落后)。这样,尽管被用户的手遮挡,但用户仍可注意到被照亮部分400的变化,以知道正适当地施加控制。
当被照亮部分400的端点404被配置为比旋转部分206移动得更快(例如,在前面)时,远程控制装置202可在旋转部分206的小于360度旋转内缩放照明负载或音频装置的音量的全强度水平,使得当在强度水平范围的低端与高端之间调整照明负载或音频装置的音量的强度水平时,被照明部分400可在状态指示器203的整个圆周上扩展或收缩。例如,远程控制装置202可被配置为在旋转部分206的210度旋转内缩放照明负载或音频装置的音量的全强度水平范围,使得当旋转部分206的旋转移动达到210度时,被照亮部分400可覆盖状态指示器203的整个圆周(例如,360度),以指示照明负载或音频装置的音量的强度水平已经达到最大强度水平。这样的技术还可减小用于在低端与高端之间调整照明负载或音频装置的音量的强度水平的旋转量。例如,用户可能够以较少的手腕移动在更大的范围内调整强度水平。
远程控制装置202可被配置为照亮状态指示器203的一部分,并且指示被照亮部分400的长度(例如,同时地从被照亮部分400的两个端点402、404)扩展和收缩,以指示照明负载或音频装置的音量的强度水平。被照亮部分可被均匀地照亮至共同的强度水平。可选地,被照亮部分的不同区段可被照亮至不同的强度水平。例如,状态指示器400的被照亮部分的端点404可被照亮至比其余被照亮部分更高的强度水平,并且被照亮部分400的强度水平可朝向起点402减小。这样,用户仍然可基于被照亮部分的长度来接收反馈,但可消耗更少的电池电量来提供反馈。
远程控制装置(例如,远程控制装置202)可被配置为响应于对照明装置的强度水平的调整而使用相对控制来提供反馈(例如,相对反馈)。相对反馈可经由远程控制装置的状态指示器(例如,状态指示器203)来提供。相对反馈可取决于用来控制照明装置的命令(例如,用户交互事件)。例如,响应于旋转部分(例如,旋转部分206)的用于升高照明装置的强度水平的顺时针旋转(例如,升高命令),远程控制装置可被配置为通过照亮状态指示器来提供相对反馈,以跟踪具有最低强度水平的相关联的照明装置的强度水平。而且,或者可选地,响应于致动部分(例如,致动部分204)的用于将照明装置切换开至由场景(例如,开场景)定义的相应的强度水平的致动,远程控制装置可被配置为通过照亮状态指示器来提供相对反馈,以跟踪由场景定义的照明装置的强度水平。
可基于相关联的照明装置的强度水平来提供相对反馈。例如,在相关联的照明装置的强度水平增大时,状态指示器的照亮百分比可增大。类似地,在相关联的照明装置的强度水平减小时,状态指示器的照亮百分比可减小。因此,相对反馈可提供用户交互(例如,致动部分的致动和/或旋转部分的旋转)对相关联的照明装置的影响的指示。
图5A和图5B示出了响应于致动部分504的用于打开照明装置510、520、530的致动而经由远程控制装置502的状态指示器503提供相对反馈的示例情形。致动部分504的致动可致使根据开场景来提供反馈。如本文所述,远程控制装置502可包括被配置为照亮状态指示器503的多个光源(例如,LED)。远程控制装置502还可包括旋转部分506。此外,远程控制装置502可与照明装置510、520、530相关联,并且可被配置为控制照明装置510、520、530的强度水平。状态指示器503可响应于致动部分504的致动而被照亮(例如,多个光源中的一个或多个可被照亮)。
致动部分504的致动可致使照明装置510、520、530根据照明装置的当前强度水平而被打开或关闭。例如,如果照明装置510、520、530中的任一个为开,则致动部分504的致动可导致照明装置510、520、530被关闭。如果照明装置510、520、530中的每一个为关,则致动部分504的致动可导致照明装置510、520、530被打开。例如,如图5A所示,致动部分504的致动可致使照明装置510、520、530被打开至由场景(例如,开场景)定义的相应的预设强度水平。如本文所述,场景可包括相关联的照明装置510、520、530的相应的预设强度水平。例如,远程控制装置502可将致动部分504的致动的指示传输到主装置(例如,集线器装置180),所述主装置可将移动到某水平命令传输到照明装置510、520、530中的每一个以用于将照明装置打开至预设强度水平和/或将开场景命令传输到相关联的照明装置以致使照明装置改变到相应的预设强度水平。
远程控制装置502可被配置为响应于致动部分504的用于打开照明装置510、520、530的致动而通过显示动画来执行相对反馈。在远程控制装置502的状态指示器503上显示的动画可为上转变动画。响应于致动部分504的用于打开照明装置510、520、530的致动,上转变动画可在状态指示器503上显示以提供相对反馈。上转变动画可从状态指示器503的开始照度L
如图5A所示,响应于致动部分504的用于打开照明装置510、520、530的致动,可经由远程控制装置502的状态指示器503来提供相对反馈。照明装置510、520、530可各自最初设置为0%的强度水平(例如,关)。远程控制装置502的致动部分504的单次致动可致使照明装置510、520、530打开至场景(例如,开场景或最爱的场景)。例如,如图5A所示,根据场景,照明装置510可设置为0%的强度水平,并且照明装置520、530可设置为100%强度水平。在致动部分504的用于打开照明装置510、520、530(例如,根据开场景)的单次致动后,远程控制装置502可被配置为通过经由状态指示器503显示上转变动画来提供照明装置510、520、530正在被打开的相对反馈。
如图5A所示,远程控制装置502可通过识别正在状态指示器503上显示的开始照度L
集线器装置可向照明装置510、520、530传输包括移动到某水平命令的消息,以致使照明装置打开至由开场景定义的相应的强度水平。每个移动到某水平命令可包括一个或多个参数。例如,移动到某水平命令可包括用于指示照明装置510、520、530中的相应一个的强度水平的参数和/或用于指示相应的照明装置应改变到指示的强度水平的时间段的参数(例如,渐变时间T
图5B示出了响应于致动部分504的用于打开照明装置510、520、530(例如,根据开场景命令)的致动而经由远程控制装置502的状态指示器503提供相对反馈的另一个示例情形。如图5B所示,照明装置510、520、530可各自最初设置为0%的强度水平(例如,关)。远程控制装置502的致动部分504的单次致动可致使照明装置510、520、530打开至场景(例如,开场景或最爱的场景)。例如,如图5B所示,照明装置510可设置为50%的强度水平,照明装置520可设置为1%的强度水平,并且照明装置530可设置为75%的强度水平。在致动部分504的单次致动(例如,用于根据开场景命令来打开照明装置)后,状态指示器503可通过在状态指示器503上显示上转变动画来提供照明装置510、520、530正在被打开的相对反馈。
如图5B所示,远程控制装置502可通过从状态指示器的开始照度L
图6A和图6B示出了响应于致动部分604的用于打开照明装置610、620、630(例如,根据关场景)的致动而经由远程控制装置602的状态指示器603提供相对反馈的示例情形。如本文所述,远程控制装置602可包括被配置为照亮状态指示器603的多个光源(例如,LED)。远程控制装置602还可包括旋转部分606。此外,远程控制装置602可与照明装置610、620、630相关联,并且可被配置为控制照明装置610、620、630的强度水平。状态指示器603可响应于致动部分604的致动而被照亮(例如,多个光源中的一个或多个可被照亮)。
致动部分604的致动可致使照明装置610、620、630根据照明装置的当前强度水平而被打开或关闭。例如,如果照明装置610、620、630中的任一个为开,则致动部分504的致动可导致照明装置被关闭。如果照明装置610、620、630中的每一个为关,则致动部分504的致动可导致照明装置610、620、630被打开。例如,致动部分604的致动可致使照明装置610、620、630被关闭(例如,被控制到相应的预设强度水平,诸如0%,如由关场景定义)。例如,远程控制装置602可将致动部分604的致动的指示传输到主装置(例如,集线器装置180),所述主装置可将移动到某水平命令传输到照明装置610、620、630中的每一个以用于关闭照明装置和/或将关场景命令传输到相关联的照明装置以致使照明装置改变到0%的强度水平(例如,关)。
远程控制装置602可被配置为响应于致动部分604的用于打开照明装置610、620、630的致动而通过显示动画来执行相对反馈。在远程控制装置602的状态指示器603上显示的动画可为下转变动画。响应于致动部分604的用于关闭照明装置610、620、630的致动,下转变动画可在状态指示器603上显示以提供相对反馈。下转变动画可从状态指示器603的开始照度L
如图6A所示,照明装置610最初可设置为50%的强度水平,照明装置620最初可设置为1%的强度水平,并且照明装置630最初可设置为100%的强度水平。远程控制602的致动部分604的单次致动可致使照明装置610、620、630被关闭和/或达到由关场景定义的预设强度水平(例如,0%)。在致动部分604的用于关闭照明装置610、620、630(例如,切换关场景命令)的单次致动后,远程控制装置602可被配置为通过经由状态指示器603显示下转变动画来提供照明装置610、620、630正在被关闭的相对反馈。
如图6A所示,远程控制装置602可通过识别正在状态指示器603上显示的开始照度L
集线器装置可向照明装置610、620、630传输包括移动到某水平命令的消息,以致使照明装置关闭。每个移动到某水平命令可包括一个或多个参数。例如,移动到某水平命令可包括用于指示照明装置610、620、630中的相应一个的强度水平的参数和/或用于指示相应的照明装置应改变到指示的强度水平的时间段的参数(例如,渐变时间T
图6B示出了响应于致动部分604的用于打开照明装置610、620、630的致动而经由远程控制装置602的状态指示器603提供相对反馈的另一个示例情形。如图6B所示,照明装置610最初可设置为0%的强度水平,照明装置620最初可设置为1%的强度水平,并且照明装置630最初可设置为10%的强度水平。远程控制装置602的致动部分的单次致动可致使照明装置610、620、630被关闭。在致动部分604的用于关闭照明装置610、620、630的单次致动后,状态指示器603可通过在状态指示器603上显示下转变动画来提供照明装置510、520、530正在被关闭的相对反馈。
如图6B所示,远程控制装置602可通过从状态指示器603的开始照度L
图7A和图7B示出了响应于致动部分704的用于将照明装置710、720、730打开至最大强度水平(例如,100%)的致动而经由远程控制装置702的状态指示器提供相对反馈的示例情形。如本文所述,远程控制装置702可包括被配置为照亮状态指示器703的多个光源(例如,LED)。远程控制装置702还可包括旋转部分706。此外,远程控制装置702可与照明装置710、720、730相关联,并且可被配置为控制照明装置710、720、730的强度水平。状态指示器703可响应于致动部分704的致动而被照亮(例如,多个光源中的一个或多个可被照亮)。例如,致动部分704的双击致动(例如,致动部分704的在一段时间内的连续两下单次致动)可指示相关联的照明装置710、720、730将被控制到100%的强度水平(例如,全开命令)。
远程控制装置702可被配置为响应于致动部分704的用于将照明装置710、720、730打开至最大强度水平的致动而通过显示动画来执行相对反馈。在远程控制装置702的状态指示器703上显示的动画可为上转变动画。响应于致动部分704的用于将照明装置710、720、730打开至最大强度水平的致动,上转变动画可在状态指示器703上显示以提供相对反馈。上转变动画可从状态指示器703的开始照度L
如图7A所示,响应于致动部分704的用于将照明装置710、720、730打开至最大强度水平的致动,可经由远程控制装置702的状态指示器703来提供相对反馈。照明装置710、720、730最初可设置为0%的强度水平(例如,关)。致动部分704的在一段时间内的连续两下单次致动(例如,在预定义时间段内的双击致动)可致使照明装置710、720、730被打开至最大强度水平(例如,100%的强度水平)。在致动部分704的双击致动后,远程控制装置702可被配置为通过经由状态指示器703显示上转变动画来提供照明装置710、720、730正在被打开至最大强度水平的相对反馈。
如图7A所示,远程控制装置502可通过识别正在状态指示器703上显示的开始照度L
集线器装置可向照明装置710、720、730传输包括移动到某水平命令的消息,以致使照明装置打开至最大强度水平。每个移动到某水平命令可包括一个或多个参数。例如,移动到某水平命令可包括用于指示照明装置710、720、730中的相应一个要改变到的强度水平的参数和/或用于指示相应的照明装置应改变到指示的强度水平的时间段的参数(例如,渐变时间T
图7B示出了响应于致动部分704的用于将照明装置710、720、730打开至最大强度水平的致动(例如,双击致动)而经由远程控制装置702的状态指示器703提供相对反馈的另一个示例情形。如图7B所示,照明装置710最初可设置为50%的强度水平,照明装置720最初可设置为10%的强度水平,并且照明装置730最初可设置为50%的初始强度水平(例如,当前强度水平)。在致动部分704的在一段时间内的连续两下单次致动(例如,双击致动)后,状态指示器703可通过在状态指示器703上显示上转变动画来提供指示照明装置710、720、730正在改变到最大强度水平(例如,100%的强度水平)的相对反馈。
如图7B所示,远程控制装置602可通过从状态指示器703的开始照度L
图8示出了响应于旋转部分806的用于升高照明装置810、820、830的强度水平的致动(例如,旋转)而经由远程控制装置802的状态指示器803提供相对反馈的示例情形。如本文所述,远程控制装置802可包括被配置为照亮状态指示器803的多个光源(例如,LED)。远程控制装置802还可包括致动部分804。此外,远程控制装置802可与照明装置810、820、830相关联,并且可被配置为响应于旋转部分806的旋转而控制照明装置810、820、830的强度水平。状态指示器803可响应于旋转部分806的旋转而被照亮(例如,多个光源中的一个或多个可被照亮)。例如,旋转部分的顺时针旋转可指示升高命令。升高命令可将照明装置810、820、830的强度水平增大到其他强度水平(例如,以一定百分比)。每个照明装置810、820、830的强度水平的百分比增大可相对于旋转部分1006的旋转量而言。例如,可确定旋转量与照明装置810、820、830的强度水平的对应的百分比增大之间的关系(例如,比率)。旋转量可根据度数和/或极性来表达(例如,顺时针旋转可被表达为正极性并且逆时针旋转可被表达为负极性)。旋转量可对应于强度水平的一定百分比增大(例如,基于所述关系)。例如,顺时针旋转210度可对应于将相关联的照明装置810、820、830从关(例如,0%)增大到最大强度水平(例如,100%)。类似地,顺时针旋转105度可对应于将相关联的照明装置增大50%到另一个强度水平。
远程控制装置802可被配置为响应于旋转部分806的用于增大照明装置810、820、830的强度水平的旋转而通过显示动画来执行相对反馈。在远程控制装置802的状态指示器803上显示的动画可为响应动画。响应于旋转部分806的用于增大照明装置810、820、830的强度水平的旋转(例如,顺时针旋转),可在状态指示器803上显示响应动画以提供相对反馈。响应动画可从状态指示器803的开始照度L
如图8所示,照明装置810、820和830最初可分别设置为0%、50%和100%的强度水平。在旋转部分806旋转时,远程控制装置802可被配置为响应于旋转部分806的用于增大照明装置810、820、830的强度水平的旋转(例如,旋转部分的顺时针旋转)而通过经由状态指示器803显示响应动画来提供相对反馈。响应动画可提供照明装置810、820、830的强度水平正在增大的相对反馈。远程控制装置802可确定状态指示器803的开始照明L
图9示出了响应于旋转部分906的用于降低照明装置910、920、930的强度水平的致动(例如,旋转)而经由远程控制装置902的状态指示器903提供相对反馈的示例情形。如本文所述,远程控制装置902可包括被配置为照亮状态指示器903的多个光源(例如,LED)。远程控制装置902还可包括致动部分904和。此外,远程控制装置902可与照明装置910、920、930相关联,并且可被配置为响应于旋转部分906的旋转而控制照明装置910、920、930的强度水平。状态指示器903可响应于旋转部分906的旋转而被照亮(例如,多个光源中的一个或多个可被照亮)。例如,旋转部分906的逆时针旋转可指示降低命令。降低命令可将照明装置910、920、930的初始强度水平减小到另一个强度水平(例如,以一定百分比)。强度水平的百分比减小可相对于旋转量而言。例如,可确定旋转量与照明装置910、920、930的强度水平强度水平的对应百分比增大之间的关系(例如,比率)。旋转量可根据度数和/或极性来表达(例如,顺时针旋转可对应于正极性并且逆时针旋转可对应于负极性)。旋转量可对应于强度水平的一定百分比减小(例如,基于所述关系)。例如,逆时针旋转210度可对应于将相关联的照明装置从最大强度(例如,100%)减小到最小强度(例如,关或低端强度,诸如0.1%至10%)。类似地,逆时针旋转105度可对应于将相关联的照明装置减小到另一个强度水平。
远程控制装置902可被配置为响应于旋转部分906的用于增大照明装置910、920、930的强度水平的旋转而通过显示动画来执行相对反馈。在远程控制装置902的状态指示器903上显示的动画可为响应动画。响应于旋转部分906的用于减小照明装置910、920、930的强度水平的旋转(例如,逆时针旋转),可在状态指示器903上显示响应动画以执行相对反馈。响应动画可从状态指示器903的开始照度L
如图9所示,照明装置910、920和930最初可分别设置为0%、50%和100%的强度水平。响应于旋转部分906的逆时针旋转,远程控制装置902可照亮与照明装置910、920、930(例如,最亮的相关联的照明装置)的最高初始强度水平L
图10A示出了响应于旋转部分1006的顺时针旋转接着是旋转部分1006的逆时针旋转而经由远程控制装置1002的状态指示器1003提供相对反馈的示例情形。如本文所述,远程控制装置1002可包括被配置为照亮状态指示器1003的多个光源(例如,LED)。远程控制装置1002还可包括致动部分1004。此外,远程控制装置1002可与照明装置1010、1020、1030相关联,并且可被配置为响应于旋转部分1006的旋转而控制照明装置1010、1020、1030的强度水平。状态指示器1003可响应于旋转部分1006的旋转而被照亮(例如,多个光源中的一个或多个可被照亮)。例如,旋转部分1006的顺时针旋转可致使照明装置1010、1020、1030升高相应的强度水平(例如,升高命令),并且旋转部分1006的逆时针旋转可致使照明装置1010、1020、1030降低相应的强度水平(例如,降低命令)。如本文所述,升高命令可将照明装置1010、1020、1030的强度水平增大到其他强度水平。类似地,降低命令可将照明装置1010、1020、1030的强度水平减小到其他强度水平。相关联的照明装置的强度水平的变化可相对于旋转部分1006的旋转量而言。例如,可确定旋转量与照明装置1010、1020、1030的强度水平的百分比增大或减小之间的关系(例如,比率)。旋转量可根据度数和/或极性来表达(例如,顺时针旋转是正极性并且逆时针旋转是负极性)。在某些情况下,例如,旋转部分1006的顺时针旋转(例如,以升高照明装置1010、1020、1030的强度水平)可接着是旋转部分1006的逆时针旋转(例如,以降低照明装置1010、1020、1030的强度水平)。
远程控制装置1002可被配置为响应于旋转部分1006的顺时针旋转接着是旋转部分1006的逆时针旋转而显示一个或多个动画。在远程控制装置1002的状态指示器1003上显示的动画可为响应动画。响应于旋转部分1006的顺时针旋转而最初显示的响应动画可跟踪最暗的相关联的照明装置的强度水平。如果旋转部分1006的顺时针旋转接着是(例如,接着是而没有在超过预定义时间段内停止移动)旋转部分1006的逆时针旋转,则响应动画可继续在逆时针旋转期间跟踪最暗的相关联的照明装置的强度水平。响应动画可继续跟踪最暗的相关联的照明装置的强度水平(例如,不论旋转方向如何),直到旋转完成为止。跟踪最暗的相关联的照明装置(例如,而不是从跟踪最暗的相关联的照明装置切换到跟踪最亮的相关联的照明装置)例如可避免在响应动画中显示突然改变(例如,状态指示器1003的照亮百分比的突然改变)。
响应于旋转部分1006的顺时针旋转接着是旋转部分1006的逆时针旋转而显示的响应动画可从状态指示器1003的开始照度L
图10A示出了经由负载控制装置1010、1020和1030的强度水平的状态指示器1003来提供相对反馈的示例情形,所述强度水平最初可分别设置为0%、50%和100%的强度水平。响应于旋转部分1006的初始顺时针旋转接着是(例如,接着是而没有在预定义时间段内停止移动)旋转部分1006的随后逆时针旋转,响应动画可照亮状态指示器1003的与最暗的相关联的照明装置的当前强度水平相对应的百分比。当最暗的照明装置最初设置为0%的强度水平(例如,照明装置1010)时,响应动画最初可照亮状态指示器1003的0%。在沿顺时针方向继续旋转时,可控制照明装置1010、1020、1030,使得可增大最暗的相关联的照明装置的强度水平。状态指示器1003的照亮百分比也可增大以反映最暗的相关联的照明装置的强度水平的增大。例如,如图10A所示,当旋转部分1006顺时针稍微旋转(例如,旋转相对短的距离,诸如大约2度)时,可将最暗的照明装置控制到1%的强度水平。响应动画可照亮状态指示器1003的1%。在沿顺时针方向继续旋转时,状态指示器的照亮百分比可增大。例如,如图10A所示,当旋转部分1006顺时针旋转大约105度时,可将最暗的照明装置控制到大约50%的强度水平,并且响应动画可照亮状态指示器1003的50%。
当旋转将方向改变到逆时针方向时,可控制照明装置1010、1020、1030,使得可减小最暗的相关联的照明装置的强度水平。状态指示器的照亮百分比也可减小以反映最暗的相关联的照明装置的强度水平的增大。例如,如图10A所示,当旋转部分1006逆时针稍微旋转(例如,旋转相对短的距离,诸如大约2度)时,可将最暗的照明装置控制到49%的强度水平。响应动画可照亮状态指示器1003的49%。在沿逆时针方向继续旋转时,状态指示器1003的照亮百分比可减小。例如,如图10A所示,当旋转部分1006逆时针旋转大约105度时,可将最暗的照明装置控制到大约1%的强度水平,并且响应动画可照亮状态指示器1003的大约1%。
在某些情况下,例如,旋转部分1006的逆时针旋转可接着是旋转部分1006的顺时针旋转。图10B示出了响应于旋转部分1006的逆时针旋转接着是旋转部分1006的顺时针旋转而经由远程控制装置1002的状态指示器1003提供相对反馈的示例情形。如果旋转部分1006的逆时针旋转接着是(例如,接着是而没有在预定义时间段内停止移动)旋转部分1006的顺时针旋转,则响应动画可跟踪最亮的相关联的照明装置的强度水平。响应动画可继续跟踪最亮的相关联的照明装置(例如,不论旋转方向如何),直到旋转完成为止。跟踪最亮的相关联的照明装置(例如,而不是从跟踪最亮的相关联的照明装置切换到跟踪最暗的相关联的照明装置)例如可避免在响应动画中显示突然改变(例如,状态指示器1003的照亮百分比的突然改变)。
响应于旋转部分1006的逆时针旋转接着是旋转部分1006的顺时针旋转而显示的响应动画可从状态指示器1003的开始照度L
图10B示出了响应于旋转部分1006的逆时针旋转接着是旋转部分1006的顺时针旋转而经由远程控制装置1002的状态指示器1003提供相对反馈的示例情形。如图10B所示,照明装置1010、1020和1030最初可分别设置为0%、50%和100%的强度水平。响应于旋转部分1006的初始逆时针旋转接着是(例如,接着是而在没有在预定义时间段内停止移动)旋转部分1006的顺时针旋转,响应动画可照亮状态指示器1003的与最亮的相关联的照明装置的当前强度水平相对应的百分比。如图10B所示,当最亮的照明装置最初设置为100%的强度水平(例如,照明装置1030)时,响应动画可照亮状态指示器1003的100%。在沿逆时针方向继续旋转时,可控制照明装置1010、1020、1030,使得可减小最亮的相关联的照明装置的强度水平。状态指示器1003的照亮百分比也可减小以反映最暗的相关联的照明装置的强度水平的减小。例如,如图10B所示,当旋转部分1006逆时针稍微旋转(例如,旋转相对短的距离,诸如大约2度)时,可将最亮的照明装置控制到99%的强度水平。响应动画可照亮状态指示器1003的99%。在沿逆时针方向继续旋转时,状态指示器的照亮百分比可减小。例如,如图10A所示,当旋转部分1006逆时针旋转大约105度时,可将最亮的照明装置控制到大约50%的强度水平,并且响应动画可照亮状态指示器1003的50%。
当旋转将方向改变到顺时针方向时,可控制照明装置1010、1020、1030,使得可增大最亮的相关联的照明装置的强度水平。状态指示器1003的照亮百分比也可增大。例如,如图10B所示,当旋转部分1006顺时针稍微旋转(例如,旋转相对短的距离,诸如大约2度)时,可将最亮的照明装置控制到51%的强度水平。响应动画可照亮状态指示器1003的51%。在沿顺时针方向继续旋转时,状态指示器1003的照亮百分比可增大。例如,如图10B所示,当旋转部分1006顺时针旋转大约105度时,可将最亮的照明装置控制到大约50%的强度水平,并且响应动画可照亮状态指示器1003的大约100%。
图11A和图11B示出了响应于致动部分1104的致动接着是旋转部分1106的旋转而经由远程控制装置1102的状态指示器1103提供相对反馈的示例情形。如本文所述,远程控制装置1102可包括被配置为照亮状态指示器1103的多个光源(例如,LED)。如本文所述,致动部分1104的致动可致使照明装置1110、1120、1130打开(例如,开命令),并且旋转部分1106的顺时针旋转可致使照明装置1110、1120、1130升高相应的强度水平(例如,升高命令),并且/或者旋转部分2906的逆时针旋转可致使照明装置1110、1120、1130降低相应的强度水平(例如,降低命令)。在某些情况下,例如,接着致动部分1104的用于打开照明装置1110、1120、1130的致动可为旋转部分1106的顺时针旋转,以增大照明装置1110、1120、1130的相应的强度水平(例如,在200msec内)。在其他情况下,例如,接着致动部分1104的用于打开照明装置1110、1120、1130的致动可为旋转部分1106的逆时针旋转,以减小照明装置1110、1120、1130的相应的强度水平(例如,在200msec内)。远程控制装置1102可被配置为显示上转变动画接着是响应动画。上转变动画和响应动画可为相对反馈类型。例如,响应动画可为响应于致动部分1104的用于打开照明装置1110、1120、1130的致动接着是旋转部分1106的顺时针旋转而跟踪最亮的照明装置的强度水平的相对反馈类型。类似地,响应于致动部分1104的用于打开照明装置1110、1120、1130的致动(其之后是旋转部分1106的逆时针旋转),远程控制装置1102可被配置为通过显示上转变动画接着是跟踪最亮的照明装置的强度水平的响应动画来执行相对反馈。
图11A示出了响应于致动部分1104的用于打开照明装置1110、1120、1130的致动接着是旋转部分1106的用于增大照明装置1110、1120、1130的相应的强度水平的顺时针旋转而经由远程控制装置1102的状态指示器1103提供相对反馈的示例情形。如图11A所示,照明装置1110、1120和1130可各自最初设置为0%的强度水平(例如,关)。如图11A所示,响应于致动部分1104的初始致动,远程控制装置1102可被配置为通过显示上转变动画来执行相对反馈。上转变动画可包括最初照亮状态指示器的0%,并且在开转变时段T
如果接着致动部分1104的致动的是旋转部分1106的顺时针旋转(例如,在200msec内),则远程控制装置1102可被配置为通过在开转变时段T
图11B示出了响应于致动部分1104的用于打开照明装置1110、1120、1130的致动接着是旋转部分1106的用于减小照明装置1110、1120、1130的相应的强度水平的逆时针旋转而经由远程控制装置1102的状态指示器1103提供相对反馈的示例情形。如图11B所示,照明装置1110、1120、1130可各自最初设置为0%的强度水平(例如,关)。如图11B所示,响应于致动部分1104的初始致动,远程控制装置1102可被配置为通过显示上转变动画来执行相对反馈。上转变动画可包括最初照亮状态指示器1103的0%,并且在开转变时段T
如果致动部分1104的致动接着是旋转部分1106的逆时针旋转(例如,在200msec内),则远程控制装置1102可被配置为在开转变时段T
如先前所述,装置可被配置为响应于使用相对控制来调整照明装置的强度水平而使用相对控制来调整一个或多个相关联的照明装置的强度。可响应于用户交互事件(诸如旋转部分(例如,旋转部分206)的旋转)而执行一个或多个相关联的照明装置的相对控制。响应于用户交互事件,装置(例如,远程控制装置202和/或集线器装置180)可被配置为传输一个或多个消息(例如,数字消息),以相对于一个或多个照明装置的当前强度水平将一个或多个相关联的照明装置的强度水平减小和/或增大某一量。例如,所述消息可指示使一个或多个相关联的照明装置的强度水平减小和/或增大的百分比(例如,照明装置的全调光范围的百分比)。此外,使一个或多个照明装置的强度水平增大和/或减小的量(例如,使当前强度水平增大和/或减小的百分比)可以是基于用户交互事件(例如,旋转量)。
可使用单个装置以响应于用户命令而执行相对控制。例如,远程控制装置(例如,远程控制装置202)可响应于用户交互事件(例如,旋转部分204的旋转)而执行相对控制。如本文所述,用户交互事件可对应于用户命令。因此,远程控制装置可被配置为基于用户交互事件(例如,致动部分204的致动和/或旋转部分206的旋转)来确定用户命令。例如,远程控制装置可被配置为确定旋转部分的顺时针旋转对应于升高命令。
而且,或者可选地,可使用多个装置以响应于用户命令而执行相对控制。例如,可使用远程控制装置(例如,远程控制装置202)和主装置(例如,集线器装置180)来响应于用户交互事件而执行相对控制。远程控制装置可被配置为接收用户交互事件(例如,致动部分204的致动和/或旋转部分206的旋转)。因此,远程控制装置可被配置为响应于用户交互而向主装置传输消息(例如,数字消息)。主装置可被配置为基于消息、用户交互和/或与远程控制装置相关联的一个或多个照明装置的当前强度水平来确定用户命令。例如,如果主装置收到指示已经发生致动部分的致动并且照明装置的当前强度水平大于0%(例如,如果相关联的照明装置中的任一个为开)的消息,则主装置可确定用户命令是关命令。而且,或者可选地,如果主装置接收到指示旋转部分的顺时针旋转已经发生的消息,则主装置可确定用户命令是升高命令。
在基于用户交互事件来确定用户命令之后,主装置可向远程控制传输包括用于远程控制装置执行反馈的信息的消息。例如,主装置可向远程控制装置传输指示一个或多个配对的照明装置(例如,对远程控制装置的照明装置响应)的照明水平(例如,强度水平)的消息。在接收到指示照明水平的消息之后,远程控制装置可被配置为执行相对反馈。例如,如本文所述,远程控制装置可被配置为响应于关命令而基于照明水平来显示下转变动画。
主装置可基于用户命令来向与远程控制装置相关联的一个或多个照明装置传输一个或多个消息(例如,用于减小和/或增大强度水平的数字消息)。例如,主装置可传输消息以相对于与远程控制装置相关联的照明装置的当前强度水平将强度水平增大和/或减小某一量(例如,增大和/或减小的百分比的量)。而且,或者可选地,消息可包括将要发生强度水平的增大和/或减小的时间段的指示(例如,渐变时间T
远程控制装置(例如,远程控制装置202)可被配置为执行照明装置的相对控制和/或经由远程控制装置的状态指示器(例如,状态指示器203)提供相对反馈。如本文所述,远程控制装置可包括旋转部分(例如,旋转部分206)。旋转部分的旋转可用于执行一个或多个照明装置的强度水平的相对控制。例如,旋转部分的顺时针旋转(例如,升高命令)可增大照明装置的强度水平。类似地,旋转部分的逆时针旋转可减小一个或多个照明装置的强度水平。
远程控制装置可包括一个或多个属性,以提供一个或多个照明装置的相对控制和/或在远程控制装置的状态指示器上提供相对反馈。属性可为可配置的和/或不可配置的。属性可包括每编码器刻度的旋转度数的指示,从而可用于执行相对控制和/或相对反馈。每编码器刻度的旋转度的属性可按十分之一度的粒度设置(例如,以0.1度为单位)。指示每编码器刻度的旋转度数的属性可以是基于与远程控制装置关联的刻度的数量。例如,如果远程控制装置包括每旋转34个刻度,则每编码器刻度的旋转度数可包括代表10.6度(例如,360度除以34个刻度)的值。而且,或者可选地,属性的值可表达为整数值。例如,每编码器刻度的10.6度旋转可表达为106。
可基于指示每编码器刻度的旋转度数的属性来确定旋转量。例如,当属性指示每编码器刻度的旋转度数是10.6度时,对应于单个刻度的旋转量可指示10.6度旋转。类似地,对应于两个刻度的旋转量可指示21.2度旋转。如本文所述,旋转量可用于执行与远程控制装置相关联的照明装置的相对控制和/或相对反馈。
远程控制装置可包括指示照明装置的全调光范围的行程度数的属性,所述属性可用于响应于用户命令而执行相对控制和/或相对反馈。指示照明装置的全调光范围的行程度数的属性可按十分之一度的粒度设置(例如,以0.1度为单位)。指示照明装置的全调光范围的行程度数的属性可向远程控制提供经由状态指示器来执行相对反馈的能力(例如,显示一个或多个相关联的照明装置的强度水平)。而且,或者可选地,指示照明装置的全调光范围的行程度数的属性可向远程控制提供执行对与远程控制装置相关联的照明装置的相对控制(例如,将相关联的照明装置的当前强度增大和/或减小相对量)。
指示照明装置的全调光范围的行程度数的属性可用于确定增大和/或减小相关联的照明装置的当前强度水平的相对量。例如,远程控制装置可被配置为基于一个或多个照明装置的全调光范围的行程度数的指示来确定旋转部分的旋转量与一个或多个照明装置的强度水平的变化之间的关系。例如,如果照明装置的全调光范围的行程度数为210,则顺时针旋转21度(例如,基于指示每编码器刻度的旋转度数的属性确定)可将照明装置的强度水平增大10%(例如,21度旋转除以全调光范围的210度行程)。类似地,如果照明装置的全调光范围的行程度数为210,则逆时针旋转105度可将照明装置的强度水平减小50%。
如本文所述,装置可被配置为执行一个或多个照明装置的相对控制。类似地,装置可被配置为基于用户命令来执行相对反馈。此外,可使用多个装置(例如,远程控制装置和/或主装置)来执行相对控制和相对反馈。多个装置可被配置为传输消息(例如,数字消息)以执行相对控制和/或相对反馈。某些消息可由远程控制装置(例如,远程控制装置202)传输到主装置(例如,集线器装置180)。例如,由远程控制装置传输到主装置的消息可包括一个或多个用户交互事件(例如,致动部分204的致动和/或旋转部分206的旋转)的指示。
远程控制装置可被配置为传输一个或多个消息以指示旋转部分的旋转(例如,旋转会话)。远程控制装置可被配置为传输消息以指示旋转部分的旋转开始(例如,开始旋转会话消息)。开始旋转会话消息可包括一个或多个参数。例如,参数可包括旋转量的指示。如本文所述,可基于属性(诸如指示每编码器刻度的旋转度数的属性)来确定旋转量。旋转量的指示可用度数来表达。旋转量的指示可包括方向(例如,顺时针或逆时针),其可用正值或负值表达。例如,远程控制装置可被配置为传输开始旋转消息以指示旋转部分的旋转开始。开始旋转消息可包括初始旋转量。初始旋转量可为正旋转量以指示旋转部分的顺时针旋转(例如,升高命令),或者可选地,可为负旋转量以指示逆时针旋转(例如,降低命令)。
远程控制装置可被配置为接收(例如,期望接收)对开始旋转消息的一个或多个响应(例如,旋转水平信息消息)。对开始旋转消息的响应可向远程控制装置提供基于旋转部分的旋转(例如,升高命令和/或降低命令)来经由状态指示器提供相对反馈的能力。如本文所述,基于旋转部分的旋转的相对反馈可包括照亮状态指示器以指示一个或多个照明装置的当前强度水平。因此,可响应于开始旋转消息而接收到旋转水平信息消息,以向远程控制装置提供基于旋转部分的旋转(例如,升高命令或降低命令)来经由状态指示器执行相对反馈的能力。例如,旋转水平信息消息可包括一个或多个照明装置的当前强度水平。
远程控制装置可被配置为传输消息以指示旋转部分的旋转的更新(例如,旋转更新消息)。旋转更新消息可包括自旋转部分的旋转开始以来的累积旋转量的指示(例如,自传输开始旋转会话消息以来的累积旋转量)。旋转更新消息可包括一个或多个参数。例如,参数可指示旋转会话期间的总旋转量。如本文所述,可基于属性(诸如指示每编码器刻度的旋转度数的属性)来确定总旋转量。累积的更新的旋转量的指示可用度数来表达。累积旋转量的指示可包括方向(例如,顺时针或逆时针),其可用正值或负值表达。旋转更新消息可在旋转部分的整个旋转中周期性地传输(例如,每100msec)。
远程控制装置可被配置为传输消息以指示旋转消息的旋转结束(例如,结束旋转消息)。结束旋转消息可包括一个或多个参数。例如,参数可包括自旋转部分的旋转开始以来的累积旋转量的指示。如本文所述,可基于属性(诸如指示每编码器刻度的旋转度数的属性)来确定累积旋转量。累积旋转量的指示可用度数来表达。累积旋转量的指示可包括方向(例如,顺时针或逆时针),其可用正值或负值表达。例如,远程控制装置可被配置为传输包括正旋转量以指示旋转部分的顺时针旋转(例如,升高命令)的结束旋转消息。而且,或者可选地,远程控制装置可被配置为传输包括负旋转量以指示逆时针旋转(例如,降低命令)的结束旋转消息。远程控制装置可被配置为在旋转部分的旋转停止一定时间段后传输结束旋转消息。在传输结束旋转消息之后,远程控制装置可被配置为睡眠(例如,停止跟踪旋转部分的旋转)。
远程控制装置可被配置为传输消息(例如,按钮按下消息)以指示致动部分的单次致动。如本文所述,致动部分的单次致动可指示命令类型(例如,开命令或关命令)。例如,开命令可指示相关联的照明装置打开至由开场景定义的强度水平。此外,为了基于致动部分的单次致动来提供相对反馈,远程控制装置可被配置为确定致动部分的单次致动是指示开命令还是关命令。因此,远程控制装置可被配置为接收(例如,期望接收)对按钮按下消息的一个或多个响应(例如,转变水平信息消息),以指示用户命令。
对按钮按下消息的响应(例如,转变水平信息消息)可向远程控制装置提供基于致动部分的致动来经由状态指示器提供相对反馈(例如,响应于开命令和/或关命令的相对反馈)的能力。如本文所述,基于致动部分的致动的相对反馈可包括根据用户命令来显示动画(例如,上转变动画和/或下转变动画)。因此,转变水平信息消息可包括动画的开始照度L
远程控制装置可被配置为传输消息(例如,两次按下消息)以指示致动部分的两次致动(例如,致动部分的在一段时间内的连续两下单次致动)。如本文所述,致动部分的两次致动可指示全开命令(例如,将相关联的照明装置的强度水平转变到100%的命令)。因此,远程控制装置可被配置为接收(例如,期望接收)对两次按钮按下消息的一个或多个响应(例如,转变水平信息消息)。对两次按下消息的响应可向远程控制装置提供响应于致动部分的两次致动而提供相对反馈的能力。如本文所述,基于致动部分的两次致动的相对反馈可包括经由状态指示器显示动画(例如,上转变动画)。因此,转变水平信息消息可包括动画的开始照度L
主装置(例如,集线器装置180)可被配置为传输一个或多个消息(例如,数字消息)以执行一个或多个照明装置的相对控制和/或提供相对反馈。例如,某些消息可由主装置传输到远程控制装置以向远程控制装置提供执行相对反馈的能力。其他消息可由主装置传输,可传输到一个或多个照明装置以执行相对控制。
主装置可被配置为传输消息以向远程控制装置提供响应于旋转部分的旋转(例如,升高命令和/或下降命令)而执行相对反馈的能力。例如,主装置可被配置为响应于从远程控制装置接收到开始旋转消息而将旋转水平信息消息传输到远程控制装置。旋转会话水平消息可包括一个或多个参数。参数可包括由远程控制装置控制的照明装置的最高强度水平L
主装置可被配置为传输消息(例如,转变水平信息消息)以向远程控制装置提供响应于致动部分的致动(例如,开命令、关命令和/或全开命令)而执行相对反馈的能力。例如,主装置可被配置为响应于接收到按钮按下消息和/或两次按下消息而传输转变水平信息消息。转变水平信息消息可包括一个或多个参数。参数可包括要在动画(例如,上转变动画和/或下转变动画)中最初显示的开始照度L
主装置可被配置为传输消息以执行照明装置的相对控制(例如,移动到某水平消息)。例如,主装置可被配置为响应于接收到用户交互事件的指示(例如,致动部分206的致动和/或旋转部分204的旋转)和/或用户命令(例如,开命令、关命令、升高命令和/或降低命令)而传输移动到某水平消息。移动到某水平消息可包括一个或多个参数。参数可指示照明装置可改变到的强度水平。指示要改变到的强度水平的参数可用百分比来表达(例如,30%的强度水平)。另一个参数可包括照明装置应转变到指示的强度水平的时间量的指示(例如,渐变时间T
图12A至图12C是描绘用于响应于致动器(例如,远程控制装置116的致动部分117和/或旋转部分118)的致动而生成照明控制命令的示例消息流(例如,数字消息流)的通信序列图。图12A和图12B描绘了用于响应于致动部分1204的致动而查询一个或多个照明装置1208a、1208b(例如,照明装置112a、112b、122)的当前状态并且响应于识别的状态而生成照明控制命令的示例消息流。如图12A所示,远程控制装置1202可传输状态查询消息1210以识别照明装置1208a、1208b的状态。在识别用户接口事件(例如,致动、旋转、手指轻扫等)和/或接近感测事件(例如,感测电路感测到在远程控制装置116附近的占用者)之后,状态查询消息1210可作为初始消息(例如,在从睡眠状态唤醒之后)传输。状态查询消息1210可作为由照明装置1208a、1208b接收的多播消息(例如,如图12A所示)或单独的单播消息发送。
远程控制装置1202可从接收到状态查询消息1210和/或与远程控制装置1202相关联的照明装置1208a、1208b中的每一个接收对状态查询消息1210的响应。例如,照明装置1208a可响应于指示照明装置1208a处于关状态的状态查询消息1210而传输状态响应消息1212。照明装置1208b可响应于指示照明装置1208b处于开状态的状态查询消息1210而传输状态响应消息1214。状态响应消息还可指示或者可选地指示从中传输状态消息的照明装置的强度水平(例如,照明水平或亮度)、颜色(例如,色温)或其他状态。
如果远程控制装置1202确定照明装置1208a、1208b中的任一个处于开状态,则远程控制装置1202可被配置为传输关命令1216。关命令1216可作为由照明装置1208a、1208b接收的多播消息(例如,如图12A所示)或单独的单播消息发送。尽管可如图12A所示那样传输关命令1216,但远程控制装置1202可响应于识别照明装置1208a、1208b中的一个或多个的状态而传输开命令或另一个命令。照明装置1208b可响应于接收到关命令1216而关闭。
如图12B所示,远程控制装置1202可基于照明装置1208a、1208b的子集的状态来确定要发送到照明装置1208a、1208b的控制指令。例如,远程控制装置1202可基于对状态查询消息1220作出响应的照明装置中的一个或多个(例如,对状态查询消息1210作出响应的第一照明装置,如图12B所示)的状态来确定要发送到照明装置1208a、1208b的控制指令。远程控制装置1202可通过发送命令以控制照明装置来控制照明装置1208a、1208b两者的状态(例如,响应于状态查询消息1210)。如图12B所示,远程控制装置1202可对照明装置1208a(例如,对状态查询消息1200作出响应的第一照明装置)的状态作出响应。例如,状态查询消息1220可作为多播消息(例如,如图12B所示)或单播消息发送到每个照明装置1208a、1208b。照明装置1208a可为接收状态查询消息1220和/或作为响应而从中接收到状态响应消息1222的第一装置。状态响应消息1222可指示照明装置1208a的状态,这可致使远程控制装置1202发送命令以将照明装置1208a、1208b控制到相反的状态(例如,开命令1224)。开命令1224可作为多播消息(例如,如图12B所示)或单播消息发送。尽管图12B中未示出,但照明装置1208b可为接收状态查询消息1220和/或作为响应而从中接收到状态响应消息的第一装置。状态响应消息可指示照明装置1208b的状态,这可致使远程控制装置1202发送命令以将照明装置1208a、1208b控制到相反的状态(例如,关命令1234)。关命令1234可作为多播消息或单播消息发送。
图12C描绘了用于响应于强度调整致动器(例如,旋转部分118)的致动而查询照明装置的当前状态(例如,强度水平)并且响应于识别的状态而生成照明控制命令的示例消息流。如图12C所示,远程控制装置1202可传输状态查询消息1230以识别照明装置(诸如照明装置1208a、1208b、1208c)的强度水平。在识别用户接口事件(例如,致动、旋转、手指轻扫等)和/或接近感测事件(例如,感测电路感测到在远程控制装置116附近的占用者)之后,状态查询消息1230可作为初始消息(例如,在从睡眠状态唤醒之后)传输。状态查询消息1230可作为由照明装置1208a、1208b、1208c接收的多播消息(例如,如图12C所示)或单独的单播消息发送。
远程控制装置1202可基于照明装置1208a、1208b、1208c中的一个或多个(例如,照明装置的子集)的状态来确定要发送到照明装置1208a、1208b、1208c的控制指令。例如,远程控制装置1202可基于对状态查询消息1230作出响应的第一照明装置的状态(例如,强度水平)来确定要发送到照明装置1208a、1208b、1208c的控制指令。另外,远程控制装置1202可基于以超时时段对状态查询消息1230作出响应的照明装置(例如,照明装置1208a、1208b、1208c中的每一个,如图12C所示)的状态(例如,强度水平)来确定要发送到照明装置1208a、1208b、1208c的控制指令。例如,照明装置1208a可传输可指示照明装置1208a处于50%的强度水平的状态响应消息1232,照明装置1208b可传输可指示照明装置1208b处于20%的强度水平的状态响应消息1234,并且照明装置1208c可传输可指示在超时时段内照明装置1208c处于75%的强度水平的状态响应消息1236,如图12C所示。
远程控制装置1202可基于以超时时段对状态查询消息1230作出响应的照明装置1208a、1208b、1208c的强度水平来控制照明装置1208a、1208b、1208c中的每一个的强度水平。例如,远程控制装置1202可被配置为提供照明装置1208a、1208b、1208c中的每一个的强度水平的相对控制,如图12C所示。远程控制装置1202可被配置为基于远程控制从中接收到状态响应消息的照明装置(例如,从中接收到状态响应消息的最亮或最暗的照明装置)的强度水平来控制远程控制从中未接收到状态响应消息的照明装置的强度水平。
远程控制装置1202可使用对状态查询消息1230作出响应的照明装置1208a、1208b、1208c的强度水平(例如,照明装置中的每一个的强度水平)来控制照明装置。响应于接收到状态响应消息1232、1234、1236,远程控制装置1202可向照明装置1208a传输命令消息1240,包括用于转到55%的更新的强度水平L
在旋转部分旋转时,远程控制装置1202可继续向照明装置1208a、1208b、1208c传输命令消息。例如,远程控制装置1202可向相应的照明装置1208a、1208b、1208c传输命令消息1250、1252、1254,其中命令消息各自包括相应的移动到某水平命令以分别转到65%、35%和90%的更新的强度水平L
然后,远程控制装置1202可向相应的照明装置1208a、1208b、1208c传输命令消息1260、1262、1264,其中命令消息各自包括相应的移动到某水平命令以分别转到75%、45%和100%的更新的强度水平L
图13A至图13D是描绘使用本文描述的消息(例如,数字消息)的示例消息流的通信序列图。如本文所述,消息可由远程控制装置1302(例如,远程控制装置116)和/或主装置1305(例如,集线器装置180)传输。此外,远程控制装置1302和/或主装置1305可被配置为传输消息以执行相对反馈和/或相对控制。
图13A示出了描绘用于响应于致动部分1304的用于打开照明装置的致动(例如,开命令)而执行照明装置1308a、1308b的相对控制并经由远程控制装置1302的状态指示器1303提供相对反馈的示例消息流(例如,数字消息流)的通信序列图。照明装置1308a和/或1308b可与远程控制装置1302相关联。如本文所述,远程控制装置1302还可包括旋转部分1306。主装置1305可维持和/或跟踪照明装置1308a、1308b的当前状态。而且,或者可选地,主装置可与附加的照明装置通信。类似地,主装置1305可与附加的远程控制装置通信。因此,主装置1305可维持和/或跟踪与相应的照明装置相关联的远程控制装置。而且,或者可选地,主装置1305可维持由场景定义的一个或多个相关联的照明装置的预设状态。
在1310处,远程控制装置1302可检测到按钮按下(例如,致动部分1304的致动)。远程控制装置可被配置为在检测到按钮按下之后从睡眠状态唤醒。在1311处,远程控制装置1302可被配置为向主装置1305传输指示已经发生按钮按下的按钮按下消息。如本文所述,按钮按下可指示开命令和/或关命令。因此,响应于接收到按钮按下消息,主装置1305可被配置为确定用户命令。
主装置1305可基于照明装置1308a、1308b的当前状态来响应于接收到按钮按下消息而确定用户命令。例如,如果与远程控制装置1302相关联的照明装置(例如,与远程控制装置相关联的照明装置中的每一个)的当前状态为关(例如,0%状态),则主装置1305可确定开命令。而且,或者可选地,如果与远程控制装置192相关联的照明装置的当前状态是大于0%的状态,则主装置可确定关命令。因此,如图13A所示,在1312处,主装置1305可基于照明装置1308a、1308b的0%初始状态来确定开命令。在确定用户命令是开命令之后,主装置1305可确定由场景(例如,开场景)定义的照明装置1308a、1308b的预设状态。如本文所述,主装置1305可存储由场景定义的照明装置1308a、1308b中的一个的预设状态。
在1313处,主装置1305可向远程控制装置1302传输转变水平信息消息。如本文所述,转变水平信息消息可向远程控制装置1302提供执行开命令的相对反馈的能力。例如,转变水平信息消息可包括要在动画中最初显示的开始照度L
主装置1305可向照明装置1308a、1308b传输一个或多个移动到某水平消息。如本文所述,移动到某水平消息可各自包括要改变到的状态(例如,强度水平)和/或发生改变到指示的状态的时间段。因此,在1314处,主装置1305可向照明装置1308a传输移动到某水平消息。类似地,在1315处,主装置1305可向照明装置1336b传输移动到某水平消息。如图13A所示,移动到某水平消息可各自包括照明装置1308a、1308a要在400ms的时间段内改变到80%的强度水平的指示。如本文所述,将照明装置1308a、1308b调整到80%的强度水平和上转变动画转变到照亮状态指示器1303的80%可同时地发生。
图13B示出了描绘被传输以响应于致动部分1304的用于关闭照明装置的致动(例如,关命令)而执行照明装置1308a、1308b的相对控制并经由远程控制装置1292的状态指示器1303来提供相对反馈的示例消息流(例如,数字消息流)的通信序列图。在1320处,远程控制装置1302可检测到按钮按下(例如,致动部分1304的致动)。远程控制装置1302可被配置为在检测到按钮按下之后从睡眠状态唤醒。在1321处,远程控制装置1302可被配置为向主装置1305传输指示已经发生按钮按下的按钮按下消息。如本文所述,按钮按下可指示开命令和/或关命令。因此,响应于接收到按钮按下消息,主装置1305可被配置为确定用户命令。
主装置可基于照明装置1308a、1308b的当前状态来响应于接收到按钮按下消息而确定用户命令。例如,如果与远程控制装置1302相关联的照明装置1308a、1308b的当前状态包括大于0%的强度水平(例如,如果照明装置中的任一个为开),则主装置可确定关命令。因此,如图13B所示,在1322处,主装置可基于照明装置1308b的当前强度水平为50%来确定关命令。
在1323处,主装置1305可向远程控制装置1302传输转变水平信息消息。如本文所述,转变水平信息消息可向远程控制装置1302提供响应于关命令而执行相对反馈的能力。转变水平信息消息可包括要在动画中最初显示的开始照度L
主装置1305可向照明装置1308a、1308b传输一个或多个移动到某水平消息。如本文所述,移动到某水平消息可包括要改变到的状态(例如,强度水平)和/或发生改变的时间段。因此,在1324处,主装置1305可向照明装置1308a传输移动到某水平消息。类似地,在1325处,主装置1305可向照明装置1306b传输移动到某水平消息。如图13B所示,向照明装置1308a和1308b传输的移动到某水平消息可各自包括照明装置1308a、1308a要在750msec的时间段内改变到0%的强度水平的指示。如本文所述,将照明装置1308a、1308b调整到0%的强度水平和下转变动画转变到照亮状态指示器1303的0%可同时地发生。
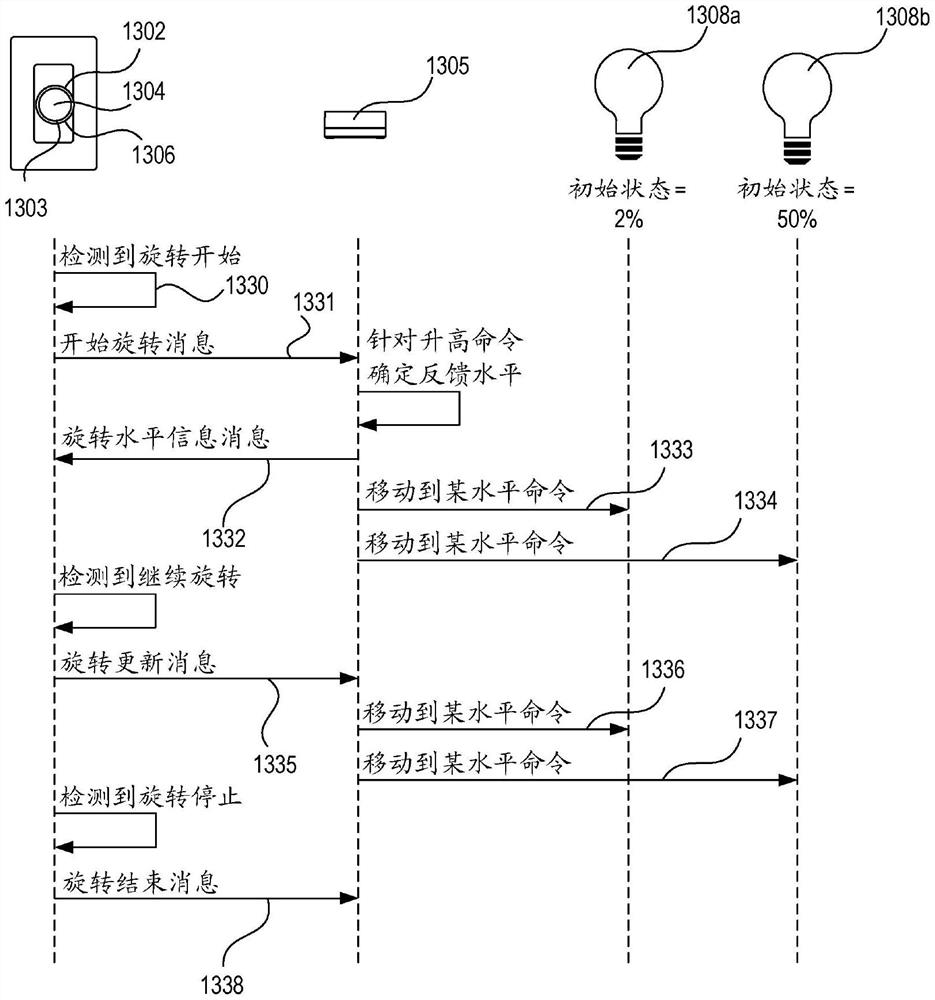
图13C示出了描绘被传输以响应于旋转部分1306的用于升高照明装置的强度水平的旋转(例如,升高命令)而执行照明装置1308a、1308b的相对控制并经由远程控制装置1302的状态指示器1303来提供相对反馈的示例消息流(例如,数字消息流)的通信序列图。在1330处,远程控制装置1302可检测到旋转部分1306的顺时针旋转。如本文所述,旋转部分1306的旋转可将远程控制装置1302从睡眠状态唤醒。在1331处,远程控制装置1302可被配置为向主装置1305传输指示旋转部分1306的旋转已经发生的消息(例如,开始旋转消息)。如本文所述,开始旋转消息可包括旋转量(例如,基于指示每编码器刻度的旋转度数的属性)和/或旋转方向的指示。例如,开始旋转消息可包括旋转部分已经顺时针旋转10.6度的指示。
响应于接收到开始旋转消息,在1332处,主装置1305可被配置为向远程控制装置1302传输旋转水平信息消息。如本文所述,旋转水平信息消息可包括与远程控制装置1302相关联的照明装置1308a、1308b的当前强度水平的指示(例如,照明装置的照明装置的最低强度水平L
旋转水平信息消息可向远程控制装置1302提供经由状态指示器1303执行相对反馈的能力。如本文所述,响应于旋转部分的顺时针旋转(例如,升高命令),远程控制装置1302可被配置为通过经由状态指示器1303显示响应动画来执行相对反馈。响应动画可基于旋转量和旋转方向来指示最暗的相关联的照明装置的状态。例如,参考图13C,响应动画可经由状态指示器1303跟踪照明装置1308a的强度水平。响应动画可通过指示包括在旋转水平信息消息中的照明装置1308a、1308b的最低强度水平L
主装置1305可被配置为基于开始旋转消息和/或远程控制装置1302的属性来确定用户命令。例如,主装置1305可被配置为基于由开始旋转消息指示的旋转量和旋转方向和/或远程控制装置1302的属性(例如,指示照明装置的全调光范围的行程度数为210度)来确定用户命令。如图13C所示,主装置1305可基于接收到指示顺时针旋转10.6度的开始旋转消息来确定用户命令包括用于将照明装置1308a、1308b的强度水平升高5%的命令(例如,10.6/210=5%)。
在确定用户命令之后,主装置1305可被配置为执行对相关联的照明装置1308a、1308b的相对控制。主装置1305可被配置为通过向相关联的照明装置1308a、1308b传输一个或多个移动到某水平命令来执行相对控制。如本文所述,移动到某水平命令可各自包括要将相关联的照明装置改变到的更新的强度水平的指示和/或发生改变到指示的强度水平的时间段的指示。例如,如图13C所示,在1333处,主装置1305可向第一照明装置1308a传输指示在100ms内将强度水平改变到7%的移动到某水平命令。类似地,在1334处,主装置1305可向第二照明装置1308b传输指示在100ms内将强度水平改变到55%的移动到某水平命令。
远程控制装置1302可被配置为响应于检测到继续旋转而向主装置1305周期性地传输(例如,每隔100msec)指示旋转量的旋转更新消息。如本文所述,旋转更新消息可包括自旋转部分开始旋转以来的累积旋转量的指示,其可以度为单位来表达。例如,如图13C所示,在1335处,远程控制装置1302可被配置为向主装置1305传输旋转更新消息。旋转更新消息可指示自发送了开始旋转消息以来,旋转部分1306已经顺时针旋转了总共42.4度。
响应于接收到旋转更新消息,主装置1305可被配置为基于更新的旋转量来执行相对控制。如本文所述,主装置1305可基于旋转更新消息和/或全调光范围属性的行程度数来确定使相关联的照明装置1308a、1308b的当前强度水平增大和/或减小的百分比。例如,如图13C所示,主装置1305可确定使相关联的照明装置1308a、1308b的当前状态增大15。因此,在1336处,主装置1305可向第一照明装置1308a传输指示在100ms内改变到22%的强度水平的移动到某水平命令。类似地,在1337处,主装置1305可向第二照明装置1308b传输指示在100ms内改变到70%的强度水平的移动到某水平命令。
远程控制装置1302可被配置为在检测到旋转部分的旋转已经停止之后传输结束旋转消息。如本文所述,结束旋转消息可包括指示在旋转会话期间的总旋转量的参数,其可以度数来表达。例如,如图13C所示,在1338处,远程控制装置1302可被配置为传输指示顺时针旋转了总共42.4度的结束旋转消息。
图13D示出了描绘被传输以响应于旋转部分1306的用于升高照明装置的强度水平的旋转(例如,降低命令)而执行照明装置1308a、1308b的相对控制并经由远程控制装置1302的状态指示器1303来提供相对反馈的示例消息流(例如,数字消息流)的通信序列图。在1340处,远程控制装置1302可检测到旋转部分的旋转开始。例如,在1340处,远程控制装置1302可检测到旋转部分1306的逆时针旋转。如本文所述,旋转部分1306的旋转可将远程控制装置1302从睡眠状态唤醒。在1341处,远程控制装置1302可被配置为向主装置1305传输指示旋转部分1306的旋转已经发生的消息(例如,开始旋转消息)。如本文所述,开始旋转消息可包括旋转量和/或旋转方向的指示(例如,正值可指示顺时针旋转,而负值可指示逆时针旋转)。例如,开始旋转消息可包括旋转部分1306已经逆时针旋转21.2度的指示。
响应于接收到开始旋转消息,在1342处,主装置1305可被配置为向远程控制装置1302传输旋转水平信息消息。如本文所述,旋转水平信息消息可包括与远程控制装置1302相关联的照明装置1308a、1308b的当前强度水平的指示(例如,照明装置的照明装置的最低强度水平L
旋转水平信息消息可向远程控制装置1302提供经由状态指示器1303执行相对反馈的能力。如本文所述,响应于旋转部分的逆时针旋转(例如,降低命令),远程控制装置1302可被配置为通过显示响应动画来执行相对反馈。响应动画可基于旋转量和旋转方向来指示最亮的相关联的照明装置的状态。例如,参考图13D,响应动画可经由状态指示器1303跟踪照明装置1308a的强度水平。
主装置1305可被配置为基于开始旋转消息和/或远程控制装置1302的属性来确定用户命令。例如,主装置1305可被配置为基于由开始旋转会话消息指示的旋转量和旋转方向和/或远程控制装置1302的属性(例如,指示照明装置的全调光范围的行程度数为210度)来确定用户命令。如图13D所示,主装置1305可基于接收到指示逆时针旋转21.2度的开始旋转消息来确定用户命令包括用于将照明装置1308a、1308b的强度水平降低的命令(例如,21.2/210=10%)。
在确定用户命令之后,主装置1305可被配置为执行对相关联的照明装置1308a、1308b的相对控制。主装置1305可被配置为通过向相关联的照明装置1308a、1308b传输一个或多个移动到某水平命令来执行相对控制。如本文所述,移动到某水平命令可各自包括要将相关联的照明装置改变到的更新的强度水平的指示和/或发生改变到指示的强度水平的时间段的指示。例如,如图13D所示,在1343处,主装置1305可向第一照明装置1308a传输指示在100ms内将强度水平改变到90%的移动到某水平命令(例如,从100%的初始强度水平减小10%)。类似地,在1344处,主装置1305可向第二照明装置1308b传输指示将强度水平改变到40%的移动到某水平命令(例如,从50%的初始强度水平减小10%)。
远程控制装置1302可被配置为在检测到继续旋转时向主装置1305周期性地传输(例如,每100msec)旋转更新消息。如本文所述,旋转更新消息可包括自旋转部分1306开始旋转以来的累积旋转量的指示,其可以度为单位来表达。例如,在1345处,远程控制装置1302可被配置为向主装置1305发送旋转更新消息。旋转更新消息可指示自发送了开始旋转消息以来,旋转部分1306已经逆时针旋转了总共53度(例如,自传输开始旋转消息以来逆时针旋转了31.8度)。
响应于接收到旋转更新消息,主装置1305可被配置为基于更新的旋转量来执行相对控制。如本文所述,主装置1305可基于旋转更新消息和/或全调光范围属性的行程度数来确定使相关联的照明装置1308a、1308b的当前强度水平增大和/或减小的百分比。例如,如图13D所示,主装置1305可确定将相关联的照明装置1308a、1308b的当前强度水平减小15%(例如,31.8度的更新的旋转除以照明装置中的每一个的全调光范围的210度行程)。因此,在1346处,主装置1305可向第一照明装置1308a传输指示在100ms内改变到74%状态的强度水平的移动到某水平命令。类似地,在1347处,主装置1305可向第二照明装置1308b传输指示在100ms内改变到25%的强度水平的移动到某水平命令。
在1348处,远程控制装置1302可向主装置1305传输指示更新的旋转量的第二旋转更新消息。如图13D所示,旋转更新消息可指示自旋转开始以来,旋转部分1306已经逆时针旋转了总共63.3度(例如,自传输开始旋转消息以来逆时针旋转了42.4度和/或自传输先前的旋转更新消息以来逆时针旋转了10.6度)。
响应于接收到第二旋转更新消息,主装置1305可被配置为基于更新的旋转量来执行相对控制。如本文所述,主装置1305可基于旋转更新消息和/或全调光范围属性的行程度数来确定使相关联的照明装置1308a、1308b的当前强度水平增大和/或减小的百分比。例如,主装置1305可确定将相关联的照明装置的当前强度水平减小5%(例如,10.6度的更新的旋转除以照明装置中的每一个的全调光范围的210度行程)。因此,在1349处,主装置1305可向第一照明装置1308a传输指示在100ms内改变到69%的强度水平的移动到某水平命令。类似地,在1350处,主装置1305可向第二照明装置1308b传输指示在100ms内改变到20%的强度水平的移动到某水平命令。
图14是示出用于响应于远程控制装置上的致动部分的致动(例如,按钮按下)而传输各种消息和/或提供反馈的示例过程1400的流程图。过程1400可由远程控制装置(例如,远程控制装置116)执行,所述远程控制装置可包括致动部分(例如,致动部分117)和/或状态指示器(例如,状态指示器119)。如本文所述,致动部分的致动可致使远程控制装置唤醒。远程控制装置可与一个或多个照明装置相关联或配对,使得在远程控制装置处的致动可引起在照明装置处的强度水平的变化。如图14所示,在1401处,可响应于致动部分的致动(例如,切换致动)来执行过程1400。例如,如本文所述,用户可致动致动部分以打开、关闭或切换一个或多个照明装置的状态。
在1402处,远程控制装置可确定已经执行的连续致动的次数。例如,远程控制装置可确定是否已经发生致动部分的单次致动(例如,单击致动)或致动部分的两次连续致动(例如,双击致动)。可基于不同次数的致动来执行不同形式的控制。如果在1402处,尚未检测到双击致动(例如,已经发生致动部分的单击致动),则在1404处,远程控制装置可传输按钮按下消息。如本文所述,可向主装置传输按钮按下消息,所述主装置可将命令转发到配对的照明装置。另外地或可选地,可直接地向配对的照明装置传输按钮按下消息。按钮按下消息可指示开命令(例如,开场景命令)或关命令(例如,关场景命令)。因此,可向主装置传输按钮按下消息,所述主装置可能够确定用于控制照明装置的命令。用于控制照明装置的命令可以是基于配对的照明装置中的每一个的当前强度水平。例如,当配对的照明装置各自被设置为1%或更高的强度水平时,按钮按下消息可包括关命令,所述关命令可将配对的照明装置中的每一个的强度水平改变到0%强度水平。类似地,当配对的照明装置各自被设置为0%的强度水平时,按钮按下消息可包括开命令,所述开命令可将配对的照明装置中的每一个的强度水平改变到全开或由场景定义的强度水平。
然而,如果在1402处,检测到双击致动,则在1404处,远程控制装置可传输两次按下消息。例如,远程控制装置可响应于在过程1400的第一次执行期间检测到致动的单击致动并且然后在过程1400的后续执行(例如,在过程1400的第一次执行的短时间段内)期间检测到致动部分的另一次致动而检测到双击致动。两次按下消息可传输到配对的照明装置和/或传输到主装置,所述主装置可将消息转发到配对的照明装置。如本文所述,两次按下消息可指示全开命令。全开命令可将一个或多个照明装置调整到100%强度水平。
在远程控制装置上提供的反馈可以是基于从主装置和/或配对的照明装置接收的信息。在1408处,远程控制装置可确定是否接收到对包括命令的消息(例如,在1404处传输的按钮按下消息和/或在1406处传输的两次按下消息)的响应。例如,响应可为来自主装置和/或配对的照明装置的消息,所述消息包括指示要在远程控制装置上提供的反馈或指示照明装置的状态以供远程控制装置确定要提供的反馈的装置信息。例如,来自主装置的装置信息可包括开始照度L
远程控制装置可基于响应消息中的信息来提供反馈。因此,如果在1410处接收到响应,则远程控制装置可如在响应消息中的信息中指示的那样照亮状态指示器。例如,在1412处,远程控制装置可将状态指示器(例如,灯条)照亮到开始照度L
如图14所示,过程1400可用于响应于致动部分的致动而提供反馈。另外,提供的反馈可以是基于命令和/或在相应的照明装置处的强度水平,执行过程1400的远程控制装置可能不知道所述命令和/或所述强度水平中的一个或多个。因此,远程控制装置可与主装置通信,所述主装置可知道命令和/或在相应的照明装置处的强度水平(例如,跟踪或维护用于确定所述命令和/或所述强度水平的信息)。如图14所示,远程控制装置可使用由主装置提供的信息来确定命令和在相应的照明装置处的强度水平,并且相应地提供反馈。
图15是示出用于响应于旋转部分的旋转而传输消息的示例过程1500的流程图。过程1500可由远程控制装置(例如,远程控制装置116)执行,所述远程控制装置可包括灯条(例如,状态指示器119)和/或旋转部分(例如,旋转部分118)。如图15所示,在1501处,可响应于旋转部分的旋转的开始而执行过程1500。
旋转会话可由远程控制装置使用来确定旋转部分的已经发生的旋转量。因此,在旋转部分的旋转已经开始之后,远程控制装置可在1502处开始旋转会话并在1504处存储旋转部分的初始位置P
如果并未接收到响应(例如,装置信息),则在1510处,远程控制装置可确定自传输开始旋转消息以来是否已经经过了超时时段。如果已经经过了超时时段,则在1512处,远程控制装置可记录错误状况。如本文所述,超时时段可为预定义的或预配置的,并且可例如指示装置要对消息作出响应的时间段。响应于在1510处超时时段到期,远程控制装置还可重新传输消息、请求响应和/或等待在所述装置处的另一次切换致动。
远程控制装置可响应于旋转部分的旋转而例如通过显示响应动画来提供相对反馈。在1514处,远程控制装置可确定旋转部分的旋转是否指示配对的照明装置升高或增大其相应的强度水平(例如,升高命令)。例如,旋转部分的顺时针旋转可指示升高命令。旋转部分的逆时针旋转可指示配对的照明装置降低或减小其相应的强度水平(例如,降低命令)。如果在1514处,旋转部分的旋转指示升高命令,则在1516处,远程控制装置可将当前光强度水平L
当前光强度水平L
图16是示出用于在旋转部分正发生旋转时传输消息的过程1600的流程图。过程1600可由远程控制装置(例如,远程控制装置116)执行,所述远程控制装置可包括灯条(例如,状态指示器119)和/或旋转部分(例如,旋转部分118)。过程1600可周期性地执行。在1601处,过程1600可开始。例如,过程1600可在旋转会话活动时(例如,在旋转部分正在旋转时)周期性地执行。在1602处,远程控制装置可确定是否存在活动的旋转会话(例如,在过程1500的1502处开始的旋转会话)。如果远程控制装置确定旋转会话不活动,则过程1600可退出。
在1604处,远程控制装置可确定旋转部分是否已经旋转。例如,远程控制装置可确定自过程1600的先前执行以来旋转部分是否已经旋转。如果远程控制装置确定旋转部分已经旋转时,则在1606处,远程控制装置可确定旋转部分的位置的变化ΔP
在1610处,远程控制装置可确定自旋转部分的旋转结束以来是否已经经过了超时时段。例如,当自旋转部分的旋转最后一次发生以来经过超时时段时,远程控制装置可确定旋转会话(例如,在过程1500的1502处开始的旋转会话)已经结束。在1612处,远程控制装置可将旋转部分的总位置变化ΔP
图17是示出用于在旋转会话期间提供相对反馈的示例过程1700的流程图。过程1700可由远程控制装置(例如,远程控制装置116)执行,所述远程控制装置可包括灯条(例如,状态指示器119)和/或旋转部分(例如,旋转部分118)。如本文所述,远程控制装置可响应于旋转部分的旋转而例如通过显示响应动画来提供相对反馈。远程控制装置可与一个或多个照明装置相关联和/或配对。过程1700可例如在旋转会话的未决期间周期性地执行。
在1701处,过程1700可开始或进入。在1702处,远程控制装置可确定旋转会话(例如,在过程1500的1502处开始的旋转会话)当前是否活动。如果旋转会话是活动的,则在1704处,远程控制装置可确定旋转部分的位置的变化ΔP
在1706处,远程控制装置可基于旋转部分的位置变化ΔP
如本文所述,远程控制装置的灯条可用于提供相对反馈。例如,灯条可调光和/或变亮以跟踪或指示配对的照明装置中的一个或多个的当前光水平。在1710处,远程控制装置可将灯条照亮至当前光强度值L
主装置可用于响应于致动部分的致动而提供相对反馈。图18是示出用于传输命令消息的示例过程1800的流程图。过程1800可由主装置(例如,集线器装置180)执行,所述主装置可与一个或多个照明装置(例如,照明装置114a、144b和122)和/或跟一个或多个照明装置相关联和/或配对的远程控制装置(例如,远程控制装置116)通信。如图18所示,在1801处,可响应于接收到按钮按下消息而执行过程1800。例如,响应于致动部分的致动,在过程1400的执行期间的1406处,可由远程控制装置传输按钮按下消息。
在1802处,主装置可检索照明装置的状态(例如,强度水平)。例如,主装置可检索与传输按钮按下消息的远程控制装置相关联或配对的照明装置中的每一个的状态。相关联和/或配对的照明装置可被包括在由主装置维护的信息中。在1804处,主装置可基于照明装置的检索到的状态来确定照明装置是否处于关状态(例如,处于0%的强度水平)。如果照明装置处于关状态,则按钮按下消息可指示照明装置将水平调整到开状态和/或由场景(例如,开场景)定义的状态。因此,如果照明装置为关,则在1806处,主装置可检索针对场景的水平(例如,强度水平)。
如本文所述,主装置可存储并维护由相应的场景定义的强度水平。在1808处,主装置可确定由场景定义的最高强度水平L
如果与远程控制装置配对的照明装置中的任一个处于大于0%的强度水平,则致动部分的致动可指示关场景命令,其中照明装置被配置为改变到关状态(例如,0%的强度水平)。因此,如果在1804处,照明装置中的任一个都不为关(例如,处于大于0%的强度水平),则在1816处,主装置可确定照明装置的最高强度水平L
主装置可用于响应于致动部分的连续致动而提供相对反馈。图19是示出用于向照明装置传输命令消息的示例过程1900的流程图。过程1900可由主装置(例如,集线器装置180)执行,所述主装置可与一个或多个照明装置(例如,照明装置114a、144b和122)和/或跟一个或多个照明装置相关联和/或配对的远程控制装置(例如,远程控制装置116)通信。如图19所示,在1901处,可响应于接收到两次按下消息而执行过程1900。例如,响应于致动部分的连续致动,在过程1400的执行期间的1404处,可由远程控制装置传输两次按下消息。如本文所述,两次按下消息可指示全开命令以将照明装置调整到最大强度水平(例如,100%强度水平)。
两次按下消息可优先于其他命令(例如,按钮按下命令),并且主装置可在接收到两次按下命令之后停止处理其他命令。例如,远程控制装置可响应于检测到致动部分的单次致动而传输按钮按下消息,并且随后可响应于在短时间段内检测到致动部分的后续致动而传输两次按下消息。因此,在1902处,主装置可假设致动部分的双击致动是预期致动并且停止处理任何先前接收到的按钮按下消息。在1904处,主装置可检索照明装置的状态。在1906处,主装置可确定照明装置的检索到的状态的最高初始强度水平(例如,当前强度水平)L
主装置可用于响应于远程控制装置(例如,远程控制装置116)的旋转部分的旋转(例如,旋转部分的旋转的开始)而执行相对反馈。图20是示出用于向远程控制装置提供强度水平信息并向照明装置传输命令消息的示例过程2000的流程图。过程2000可由主装置(例如,集线器装置180)执行,所述主装置可与一个或多个照明装置(例如,照明装置114a、144b和122)和/或远程控制装置通信。如图20所示,在2001处,可响应于从远程控制装置接收到开始旋转消息而执行过程2000。例如,响应于旋转部分的旋转的开始,在过程1500的执行期间的1506处,可由远程控制装置传输开始旋转消息。如本文所述,开始旋转消息可指示照明装置增大或减小(例如,基于旋转方向)其相应的强度水平。
在2002处,主装置可检索与传输开始旋转消息的远程控制装置配对的相应的照明装置中的每一个的状态,所述开始旋转消息可为由主装置维护的消息。在2004处,主装置可确定配对的照明装置变量的最高强度水平L
在2008处,主装置可基于旋转部分的初始旋转量来确定照明水平的变化ΔL。如本文所述,开始旋转消息可包括初始旋转量和/或旋转方向的指示。进而,主装置可基于由开始旋转消息和/或远程控制装置的属性(例如,指示照明装置的全调光范围的行程度数的属性和/或指示每编码器刻度的旋转度数的属性)指示的旋转量和旋转方向来确定照明水平的变化ΔL。在2010处,主装置可确定照明装置中的每一个的更新的照明水平L
主装置可用于响应于远程控制装置(例如,远程控制装置116)的旋转部分的旋转(例如,旋转部分的继续旋转)而执行相对反馈。图21是示出用于向远程控制装置提供强度水平信息并向照明装置传输命令消息的示例过程2100的流程图。过程2100可由主装置(例如,集线器装置180)执行,所述主装置可与一个或多个照明装置(例如,照明装置114a、144b和122)和/或远程控制装置通信。如图21所示,在2101处,可响应于从远程控制装置接收到旋转更新消息而执行过程2100。例如,响应于旋转部分的继续旋转(例如,旋转部分在旋转会话已经开始之后的旋转),在过程1600的执行期间的1608处,可由远程控制装置传输旋转更新消息。如本文所述,在旋转会话活动时,旋转更新消息可指示照明装置增大或减小(例如,基于旋转方向)相应的强度水平。
在2102处,主装置可基于旋转量来确定照明水平的变化ΔL。如本文所述,旋转更新消息可包括继续旋转的旋转量和/或旋转方向(例如,自旋转会话开始以来的旋转量)的指示。另外,旋转更新消息可包括自传输先前的开始旋转消息或先前的旋转更新消息以来的旋转量的指示。进而,主装置可基于由旋转更新消息和/或远程控制装置的属性(例如,指示照明装置的全调光范围的行程度数的属性和/或指示每编码器刻度的旋转度数的属性)指示的旋转量和/或旋转方向来确定照明水平的变化ΔL。在2104处,主装置可确定照明装置中的每一个的更新的照明水平L
主装置可用于响应于远程控制装置(例如,远程控制装置116)的旋转部分的旋转(例如,旋转部分的继续旋转)的结束而停止提供相对反馈。图22是示出用于向远程控制装置提供强度水平信息并向照明装置传输命令消息的示例过程2200的流程图。过程2200可由主装置(例如,集线器装置180)执行,所述主装置可与一个或多个照明装置(例如,照明装置114a、144b和122)和/或远程控制装置通信。如图22所示,在2201处,可响应于从远程控制装置接收到结束旋转消息而执行过程2200。例如,响应于旋转部分的旋转的结束(例如,旋转会话已经结束),在过程1600的执行期间的1614处,可由远程控制装置传输结束旋转消息。
在2202处,主装置可基于总旋转量来确定照明水平的变化ΔL。如本文所述,结束旋转消息可包括在旋转会话期间的总旋转量的量和/或方向的指示。主装置可基于由结束旋转消息和/或远程控制装置的属性(例如,指示照明装置的全调光范围的行程度数的属性和/或指示每编码器刻度的旋转度数的属性)指示的总旋转量和/或旋转方向来确定照明水平的变化ΔL。在2204处,主装置可确定照明装置中的每一个的更新的照明水平L
图23是示出如本文所述的示例负载控制装置(例如,负载控制装置2300)的框图。负载控制装置2300可为调光器开关、电子开关、照明装置(例如,灯泡、用于灯的电子镇流器、用于LED光源的LED驱动器等)、用于控制插入式电负载的AC插入式负载控制装置、可控制电插座、温度控制装置(例如,恒温器)、用于电动窗帘的马达驱动单元、用于风扇(例如,吊式风扇)的马达驱动单元、音频装置(例如,可控制扬声器或播放装置)、家用电器、监控相机装置或其他负载控制装置。负载控制装置2300可包括通信电路2302。通信电路2302可包括接收器、RF收发器,或者能够经由通信链路2310执行有线和/或无线通信的其他通信模块。通信电路2302可与控制电路2304通信。控制电路2304可包括一个或多个通用处理器、专用处理器、常规处理器、数字信号处理器(DSP)、微处理器、集成电路、可编程逻辑装置(PLD)、专用集成电路(ASIC)等。控制电路2304可执行信号编码、数据处理、电力控制、输入/输出处理,或者使得负载控制装置2300能够如本文所述那样执行的任何其他功能。
控制电路2304可将信息存储在存储器2306中和/或从所述存储器检索信息。例如,存储器2306可维护相关联的控制装置和/或控制配置指令的注册表。存储器2306可包括不可移动存储器和/或可移动存储器。负载控制电路2308可从控制电路2304接收指令,并且可基于接收到的指令来控制电负载2316。负载控制电路2308可向控制电路2304发送关于电负载2316的状态的状态反馈。负载控制电路2308可经由热连接2312和中性连接2314接收电力,并且可向电负载2316提供一定量的电力。电负载2316可包括任何类型的电负载。
控制电路2304可与致动器2318(例如,一个或多个按钮)通信,所述致动器可由用户致动以将用户选择传达到控制电路2304。例如,致动器2318可被致动以将控制电路2304置于关联模式和/或传达来自负载控制装置2300的关联消息。
图24是示出如本文所述的示例控制器装置2400的框图。控制器装置2400可为远程控制装置、占用传感器、日光传感器、窗户传感器、温度传感器等。控制器装置2400可包括控制电路2402以用于控制控制器装置2400的功能。控制电路2402可包括一个或多个通用处理器、专用处理器、常规处理器、数字信号处理器(DSP)、微处理器、集成电路、可编程逻辑装置(PLD)、专用集成电路(ASIC)等。控制电路2402可执行信号编码、数据处理、电力控制、输入/输出处理,以及/或者使得控制器装置2400能够如本文所述那样执行的任何其他功能。
控制电路2402可将信息存储在存储器2404中和/或从所述存储器检索信息。存储器2404可包括不可移动存储器和/或可移动存储器,如本文所述。
控制器装置2400可包括一个或多个光源(诸如一个或多个LED2412)以用于向用户提供反馈。一个或多个LED 2412可被包括在状态指示器中并且可由控制电路2402控制。控制电路2402可如本文所述那样控制LED 2412以向用户提供反馈。
控制器装置2400可包括通信电路2408以用于发射和/或接收信息。通信电路2408可经由有线和/或无线通信发射和/或接收信息。通信电路2408可包括发射器、RF收发器,或者能够执行有线和/或无线通信的其他电路。通信电路2408可与控制电路2402通信,以发射和/或接收信息。
控制电路2402还可与输入电路2406通信。输入电路2406可包括致动器(例如,一个或多个按钮)、旋转或滑动部分或传感器电路(例如,占用传感器电路、日光传感器电路或温度传感器电路),以接收可发送到装置来控制电负载的输入。输入电路2406还可包括接近感测电路以用于感测在控制器装置2400附近的占用者。例如,控制器装置2402可从输入电路2406接收输入,以将控制电路2402置于关联模式和/或传达来自控制器装置2400的关联消息。控制电路2402可从输入电路2406接收信息(例如,表明按钮已经被致动、旋转部分已经被旋转或信息已经被感测到的指示)和/或接近感测事件的指示。输入电路2406可作为开/关事件被致动。控制器装置2400内的模块中的每一个可由电源2410供电。
图25是示出如本文所述的示例网络装置2500的框图。例如,网络装置2500可包括网络装置190。网络装置2500可包括控制电路2502以用于控制网络装置2500的功能。控制电路2502可包括一个或多个通用处理器、专用处理器、常规处理器、数字信号处理器(DSP)、微处理器、集成电路、可编程逻辑装置(PLD)、专用集成电路(ASIC)等。控制电路2502可执行信号编码、数据处理、电力控制、输入/输出处理,或者使得网络装置2500能够如本文所述那样执行的任何其他功能。控制电路2502可将信息存储在存储器2504中和/或从所述存储器检索信息。存储器2504可包括不可移动存储器和/或可移动存储器。不可移动存储器可包括随机存取存储器(RAM)、只读存储器(ROM)、硬盘或任何其他类型的不可移动存储器存储装置。可移动存储器可包括订户身份模块(SIM)卡、记忆棒、存储卡或任何其他类型的可移动存储器。
网络装置2500可包括通信电路2508以用于发射和/或接收信息。通信电路2508可执行无线和/或有线通信。通信电路2508可包括RF收发器,或者能够经由天线执行无线通信的其他电路。通信电路2508可与控制电路2502通信,以发射和/或接收信息。
控制电路2502也可与显示器2506通信,以向用户提供信息。控制电路2502和/或显示器2506可生成用于在网络装置2500上显示的GUI。显示器2506和控制电路2502可处于双向通信,因为显示器2506可包括能够从用户接收信息并向控制电路2502提供所述信息的触摸屏模块。网络装置还可包括致动器2512(例如,一个或多个按钮),所述致动器可由用户致动以将用户选择传达到控制电路2502。
网络装置2500内的模块中的每一个可由电源2510供电。电源2510可包括例如AC电源或DC电源。电源2510可生成供电电压V
图26是示出如本文所述的示例集线器装置2600的框图。集线器装置2600可包括控制电路2602以用于控制集线器装置2600的功能。控制电路2602可包括一个或多个通用处理器、专用处理器、常规处理器、数字信号处理器(DSP)、微处理器、集成电路、可编程逻辑装置(PLD)、专用集成电路(ASIC)等。控制电路2602可执行信号编码、数据处理、电力控制、输入/输出处理,或者使得集线器装置2600能够如本文所述那样执行的任何其他功能。控制电路2602可将信息存储在存储器2604中和/或从所述存储器检索信息。存储器2604可包括不可移动存储器和/或可移动存储器。不可移动存储器可包括随机存取存储器(RAM)、只读存储器(ROM)、硬盘或任何其他类型的不可移动存储器存储装置。可移动存储器可包括订户身份模块(SIM)卡、记忆棒、存储卡或任何其他类型的可移动存储器。
集线器装置2600可包括通信电路2608以用于发射和/或接收信息。通信电路2608可执行无线和/或有线通信。集线器装置2600还可包括或者可选地包括通信电路2612以用于发射和/或接收信息。通信电路2612可执行无线和/或有线通信。通信电路2608和2612可与控制电路2602通信。通信电路2608和2612可包括RF收发器,或者能够经由天线执行无线通信的其他通信模块。通信电路2608和通信电路2612可能够经由相同的通信信道或不同的通信信道执行通信。例如,通信电路2608可能够经由无线通信信道(例如,
控制电路2602可与LED指示器2614通信,以向用户提供指示。控制电路2602可与致动器2606(例如,一个或多个按钮)通信,所述致动器可由用户致动以将用户选择传达到控制电路2602。例如,致动器2606可被致动以将控制电路2602置于关联模式和/或传达来自集线器装置2600的关联消息。
集线器装置2600内的模块中的每一个可由电源2610供电。电源2610可包括例如AC电源或DC电源。电源2610可生成供电电压V
尽管本文以特定组合描述了特征和要素,但每个特征或要素可被单独地使用或与其他特征和要素以任何组合使用。例如,本文描述的功能可被描述为由控制装置(诸如远程控制装置或照明装置)执行,但可类似地由集线器装置或网络装置执行。本文描述的方法可在并入计算机可读介质中以由计算机或处理器执行的计算机程序、软件或固件中实现。计算机可读介质的示例包括电子信号(通过有线或无线连接传输)和计算机可读存储介质。计算机可读存储介质的示例包括,但不限于,只读存储器(ROM)、随机存取存储器(RAM)、可移动磁盘和光学介质(诸如CD-ROM盘和数字通用盘(DVD))。
- 控制电负载组
- 控制电负载组