基于驻波声场的微球开放式压电微操控测量系统及其方法
文献发布时间:2023-06-19 11:16:08
技术领域
本发明涉及微操控和微颗粒快速筛选领域,尤其涉及一种基于驻波声场的微球开放式压电微操控测量系统及其方法。
背景技术
激光约束核聚变ICF是以高功率、高能量密度激光为驱动源,采用球形内爆增压技术使球形靶丸内的核燃料达到点火条件,从而形成自持的热核反应。ICF有望为人类提供清洁、无污染的能源。ICF实验对于作为核燃料容器的空心微球(靶丸)的品质在几何参数、表面缺陷等方面有着严格的要求,靶丸的品质直接影响ICF打靶实验的成败。目前,对于测量微球的几何参数所采用的检测设备,有X光射线仪、白光干涉仪、原子力显微镜等。这些仪器的测量精度很高(可以达到微米级甚至纳米级)。然而这些设备检测效率很低,且均采用人工检测的方式,微球筛选的主观因素影响较大。而且由于靶丸的制备量巨大,现有设备的检测效率低,所以不可能全部采用高精度的筛选方法,因此急需要一种微球快速测量进而进行筛选的装置,提高微球的筛选效率。
由于靶丸具有尺寸微小(直径100~1000μm)、结构脆弱、粘性强等特点,所以操控微球的设备不能对微球造成二次损伤。而采用声波为驱动源的微操控技术具有高生物相容性、微尺度操控稳定等优点,意味着微操控技术可以应用于微球的无损检测和测量中。
发明内容
本发明所要解决的技术问题是针对背景技术中所涉及到的缺陷,提供一种基于驻波声场的微球开放式压电微操控测量系统及其方法。
本发明为解决上述技术问题采用以下技术方案:
基于驻波声场的微球开放式压电微操控测量系统,包括微操控装置、显微检测装置和计算装置;
所述微操控装置包括容器、预紧模块、压电陶瓷模块和固定圆筒;
所述容器为上端开口下端封闭的空心圆柱体;
所述压电陶瓷模块包含2n片呈圆环状的压电陶瓷片,n为大于等于1的自然数;
所述预紧模块包含连接圆台、连接柱、连接筒和预紧螺栓,其中,所述预紧螺栓包含螺帽和螺柱;所述连接柱呈圆柱状,其下端面沿轴线设有和所述预紧螺栓相配合的螺纹孔;所述连接圆台呈圆台状,其面积较小的一端和所述容器下端面同轴固连、面积较大的一端和所述连接柱的上端面同轴固连;所述连接筒为下端开口上端封闭的空心圆柱体,且连接筒的上端面中心设有供所述预紧螺栓的螺柱穿过的通孔;所述预紧螺栓的螺帽位于连接筒中,螺柱依次穿过连接筒上端面的通孔、2n片压电陶瓷片中心的通孔后和所述连接柱的螺纹通孔螺纹相连,用于将所述2n片压电陶瓷片夹在连接柱、连接筒之间并调节2n片压电陶瓷片两端的预压力;
所述2n片压电陶瓷片均沿其厚度方向极化,且相邻压电陶瓷片的极化方向相反;
所述连接筒的侧壁两侧设有对称的连接耳;
所述固定圆筒为两端开口的通孔圆柱体,套在所述连接筒外,其上端和所述连接筒两侧的连接耳固连;
所述容器用于盛放液体承载介质以及液体承载介质中待测量形貌参数的微球;
所述连接筒、压电陶瓷模块、连接柱和连接圆台构成换能器,所述压电陶瓷模块用于施加简谐电压信号激励换能器的m阶纵向振动,以诱发出容器的Bm+2阶弯曲振动,m为大于等于1的奇数;
所述显微检测装置采用商用工业显微镜,所述微操控装置固定圆筒的下端放置在显微检测装置的载物台上,使得容器水平放置;所述显微检测装置用于观测容器中微球的图像并将其传递给所述计算装置;
所述计算装置用于接收显微检测装置采集到的图像并对其进行分析,通过机器学习得到微球的运动轨迹和其形貌参数。
作为本发明一种基于驻波声场的微球开放式压电微操控测量系统进一步的优化方案,所述连接柱的侧壁上设有一对平键,以配合所述预紧螺栓调节2n片压电陶瓷片两端的预压力。
作为本发明一种基于驻波声场的微球开放式压电微操控测量系统进一步的优化方案,所述n取2。
本发明还公开了一种该基于驻波声场的微球开放式压电微操控测量系统的微操控方法,包含以下步骤:
对压电陶瓷模块施加频率为预设的第一频率阈值f1的简谐电压信号,激励出换能器的一阶纵振模态,诱发出容器的B30弯振模态,此时,液体承载介质中的声场分布与模态一致,即声压节点对应模态节点、声压波腹对应模态振幅最大处,放置在容器液体承载介质内的微球在声辐射力和液体粘滞力的作用下会朝着声压节点运动;置于容器圆心附近的微球聚集在圆心处,并在声流的作用下做自转运动;
停止施加频率为f1的简谐电压信号,对压电陶瓷模块施加频率为预设的第二频率阈值f2的简谐电压信号,激励出换能器的三阶纵振模态,诱发出容器的B50弯振模态,由于B30弯振模态和B50弯振模态节圆空间上分布存在差异,聚集在容器圆心的微球向外运动并停止在距离圆心最近的节圆上。
本发明采用以上技术方案与现有技术相比,具有以下技术效果:
1. 设备简单、价格便宜,可以降低常见测量系统的成本;
2. 采用压电激励的微操控装置可以实现对微球的无损、无接触操控,操控手段包括包括:定位操控、旋转操控、迁移操控;
3. 计算装置通过机器学习能够快速得到微球的运动轨迹和其形貌参数。
附图说明
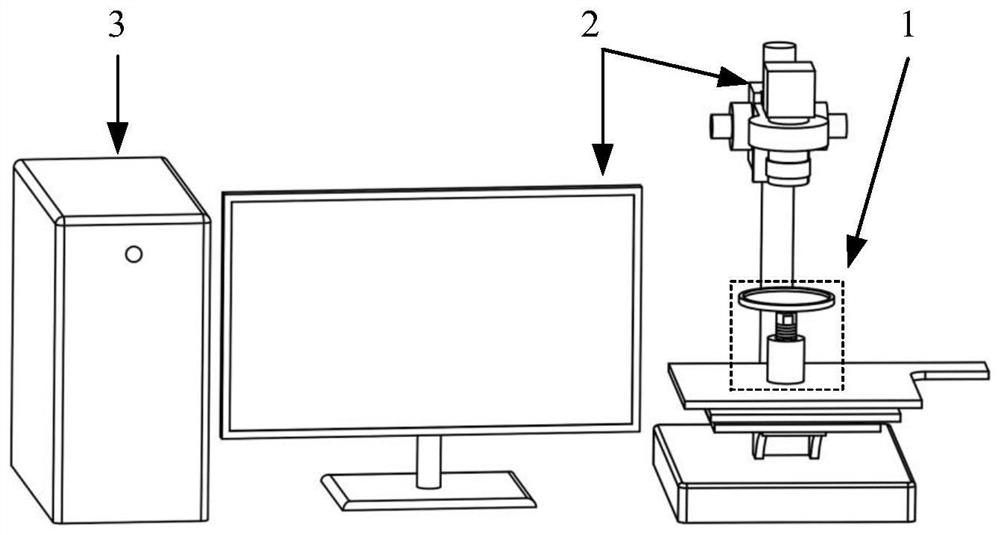
图1是本发明的结构示意图;
图2是本发明中微操控装置的结构示意图;
图3是本发明中容器、连接圆台、连接柱相配合的结构示意图;
图4是本发明中显微检测装置的结构示意图;
图5是本发明中容器和换能器B30模态的仿真示意图;
图6是本发明的容器中B30模态所诱导的声压节线分布示意图;
图7是本发明的容器中B30模态所诱导的容器直径线上的声压分布及微球运动示意图;
图8是本发明中容器和换能器B50模态的仿真示意图;
图9是本发明的容器中B50模态所诱导的声压节线分布示意图;
图10是本发明的容器中B50模态所诱导的容器直径线上的声压分布及微球运动示意图。
图中,1-微操控装置,1.1-容器,1.2-压电陶瓷模块,1.3.1-连接圆台,1.3.2-连接柱,1.3.3-连接筒,1.3.4-预紧螺栓,1.4-固定圆筒,2-显微检测装置,2.1-CCD相机,2.2-显微镜头,2.3-显微镜支架,2.4-载物台,2.5-显示屏,3-计算装置。
具体实施方式
下面结合附图对本发明的技术方案做进一步的详细说明:
本发明可以以许多不同的形式实现,而不应当认为限于这里所述的实施例。相反,提供这些实施例以便使本公开透彻且完整,并且将向本领域技术人员充分表达本发明的范围。在附图中,为了清楚起见放大了组件。
如图1所示,本发明公开了一种基于驻波声场的微球开放式压电微操控测量系统,其特征在于,包括微操控装置、显微检测装置和计算装置。
所述微操控装置包括容器、预紧模块、压电陶瓷模块和固定圆筒;所述容器为上端开口下端封闭的空心圆柱体;如图2所示,所述压电陶瓷模块包含2n片呈圆环状的压电陶瓷片,n为大于等于1的自然数;所述预紧模块包含连接圆台、连接柱、连接筒和预紧螺栓,其中,所述预紧螺栓包含螺帽和螺柱;所述连接柱呈圆柱状,其下端面沿轴线设有和所述预紧螺栓相配合的螺纹通孔;所述连接圆台呈圆台状,其面积较小的一端和所述容器下端面同轴固连、面积较大的一端和所述连接柱的上端面同轴固连;所述连接筒为下端开口上端封闭的空心圆柱体,且连接筒的上端面中心设有供所述预紧螺栓的螺柱穿过的通孔,如图3所示;所述预紧螺栓的螺帽位于连接筒中,螺柱依次穿过连接筒上端面的通孔、2n片压电陶瓷片中心的通孔后和所述连接柱的螺纹通孔螺纹相连,用于将所述2n片压电陶瓷片夹在连接柱、连接筒之间并调节2n片压电陶瓷片两端的预压力;所述2n片压电陶瓷片均沿其厚度方向极化,且相邻压电陶瓷片的极化方向相反;所述连接筒的侧壁两侧设有对称的连接耳;所述固定圆筒为两端开口的通孔圆柱体,套在所述连接筒外,其上端和所述连接筒两侧的连接耳固连。
所述容器用于盛放液体承载介质以及液体承载介质中待测量形貌参数的微球;本发明中待分离的微球包括微颗粒、细胞及生物体等,其尺度在纳米到毫米之间;根据微球的不同,容器中需加入不同的液体承载介质,如去离子水、无水乙醇、培养液、组织液等。
所述连接筒、压电陶瓷模块、连接柱和连接圆台构成换能器,所述压电陶瓷模块用于施加简谐电压信号激励换能器的m阶纵向振动,以诱发出容器的Bm+2阶弯曲振动,m为大于等于1的奇数,如图5、图6所示。
如图4所示,所述显微检测装置采用商用工业显微镜,包括CCD相机、显微镜头、显微镜支架、载物台和显示屏;所述微操控装置固定圆筒的下端放置在显微检测装置的载物台上,使得容器水平放置;微操控装置容器内的微球通过显微镜头和CCD相机的组合来观测,观测到的微球图像在显示屏上实时显示并传递给所述计算装置。
所述计算装置用于接收显微检测装置采集到的图像并对其进行分析,通过机器学习得到微球的运动轨迹和其形貌参数。
所述计算装置可以采用计算机,也可以才用计算芯片。
所述连接柱的侧壁上设有一对平键,以配合所述预紧螺栓调节2n片压电陶瓷片两端的预压力;n优先取2。
本发明还公开了一种该基于驻波声场的微球开放式压电微操控测量系统的微操控方法,以n取2的时候为例,包含以下步骤:
对压电陶瓷模块施加频率为预设的第一频率阈值f1的简谐电压信号,激励出换能器的一阶纵振模态,诱发出容器的B30弯振模态,如图5所示,此时,液体承载介质中的声场分布与模态一致,即声压节点对应模态节点、声压波腹对应模态振幅最大处,也即容器内液体承载介质具有三个声压节圆,如图6所示;放置在容器液体承载介质内的微球在声辐射力和液体粘滞力的作用下会朝着声压节点运动,如图7所示;置于容器圆心附近的微球聚集在圆心处,并在声流的作用下做自转运动;
停止施加频率为f1的简谐电压信号,对压电陶瓷模块施加频率为预设的第二频率阈值f2的简谐电压信号,激励出换能器的三阶纵振模态,诱发出容器的B50弯振模态,如图8所示;此时容器内液体承载介质具有五个声压节圆,如图9所示;由于B30弯振模态和B50弯振模态节圆空间上分布存在差异,聚集在容器圆心的微球向外运动并停止在距离圆心最近的节圆上,如图10所示。
上述微操控方法中包含了微球的圆心定位,圆心处自转和定向运动三种操控手段。
需要注意的是,微球的定位和旋转不仅限于容器的圆心,还可以在各节圆上的实现,且微球的迁移路径不仅限于圆心到节圆,还包括多种模态下节圆之间的迁移。
本技术领域技术人员可以理解的是,除非另外定义,这里使用的所有术语(包括技术术语和科学术语)具有与本发明所属领域中的普通技术人员的一般理解相同的意义。还应该理解的是,诸如通用字典中定义的那些术语应该被理解为具有与现有技术的上下文中的意义一致的意义,并且除非像这里一样定义,不会用理想化或过于正式的含义来解释。
以上所述的具体实施方式,对本发明的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本发明的具体实施方式而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
- 基于驻波声场的微球开放式压电微操控测量系统及其方法
- 基于驻波声场的微球开放式压电微操控测量系统及其方法