一种基于红外热成像仪的玻璃幕墙检测方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及红外热成像技术领域,尤其是一种基于红外热成像仪的玻璃幕墙检测方法。
背景技术
玻璃幕墙作为一种美观新颖的建筑墙体,被广泛应用于现代高层建筑。现代玻璃幕墙一般由钢材骨架、玻璃面板、硅酮结构胶(以下简称结构胶)以及钢材构件组成。在实际应用环境中,由于主体结构变形、结构胶安装不合理或老化以及玻璃自身在生产加工过程中产生的瑕疵,都可能会对玻璃幕墙的气密性、水密性造成影响,导致雨水渗漏、保温性能下降,局部温度异于主体温度。这种异常无法被肉眼捕捉,因此采用红外热像仪对玻璃幕墙进行检测。同时玻璃幕墙通常大面积装配于高层建筑,人工检测效率低下,成本昂贵,危险性高。采用无人机则可以轻松解决以上问题。但受红外热像仪本身和检测环境的影响,红外图像与可见光图像相比,存在对比度低、边缘模糊、噪声复杂等缺点。
发明内容
本发明要解决的技术问题是提供一种基于红外热成像仪的玻璃幕墙检测方法,经过对玻璃幕墙的红外图像进行处理,从而准确的识别玻璃幕中存在缺陷区域,所述缺陷区域是指玻璃幕墙中存在结构变形、损坏等需要维修或更换区域。
本发明利用搭载于无人机的红外热像仪对玻璃幕墙进行拍摄,将获得的红外图像作为输入,通过图像处理检测幕墙是否存在缺陷。
一种基于红外热成像仪的玻璃幕墙检测方法,具体包括以下几个步骤;
步骤1,利用红外热像仪采集玻璃幕墙检的红外图像训练样本集,对支持向量机模型进行训练和测试,得到训练后的支持向量机模型;
利用红外热像仪对幕墙进行图像拍摄,形成红外图像训练样本集,红外图像训练样本集包括红外图像训练正样本集和红外图像训练负样本集,所述红外图像训练正样本集是指存在缺陷、且温异常的玻璃幕墙所对应的红外图像,所述红外图像训练负样本集是指不存在缺陷、但温度异常的玻璃幕墙对应的红外图像,利用红外图像训练正样本集和红外图像训练负样本集对支持向量机模型进行训练和测试,并获得训练后的支持向量机模型,训练后的支持向量机模型可以完成对输入的待测红外图像进行分类。
步骤2,利用无人机搭载的红外热像仪对待检测幕墙进行图像拍摄,形成待测红外图像集。
步骤3,对待测红外图像集进行处理,并筛选出温度异常区域红外图像集;
步骤4,对步骤3中筛选出的具有温度异常区域的红外图像进行特征提取,并输入到训练后的支持向量机模型中,进行分类,区分出存在缺陷的玻璃幕墙所对应的红外图像;
步骤4.1,对具有温度异常区域的红外图像,进行红外图像灰度直方图特征提取;
步骤4.2,将红外图像灰度直方图输入到训练后的支持向量机模型中,进行分类,区分出存在缺陷的玻璃幕墙所对应的红外图像;
进一步的,步骤3中对待测红外图像集进行处理,并筛选出温度异常区域红外图像集,具体包括如下步骤;
步骤3.1,对待测红外图像集进行图像增强处理以及去噪处理,形成去噪后待测红外图像集;
去噪处理方法包括高斯滤波方法、中值滤波方法和双边滤波方法,本发明中采用高斯滤波方法。
步骤3.2,采用图像分割算法将去噪后待测红外图像集中的红外图像温度异常区域分割出来,形成温度异常区域红外图像集;
步骤3.2.1,计算去噪后待测红外图像集中图像的梯度和幅度;
步骤3.2.2:判断当前像素点是否是周围像素点中具有相同梯度方向的最大值,如果是,进行非极大值抑制;
步骤3.2.3:应用双阈值确定温度异常区域边缘,并形成温度异常区域红外图像集。
步骤3.3,将没有温度异常区域的红外图像舍弃,将温度异常区域红外图像集作为输入进行后续的特征提取。
有益效果:本发明基于Numpy、OpenCV等库,利用红外图像作为输入,对红外图像进行预处理,减小噪声的影响。对温度异常区域进行分割,通过机器学习对分割出来的异常区域进行分类,找到存在缺陷区域,经过对玻璃幕墙的红外图像的进行机器学习,并对待分类图像进行处理,从而更加准确的识别出玻璃幕中存在缺陷区域,防患于未然。
附图说明
图1是红外热像仪成像原理图
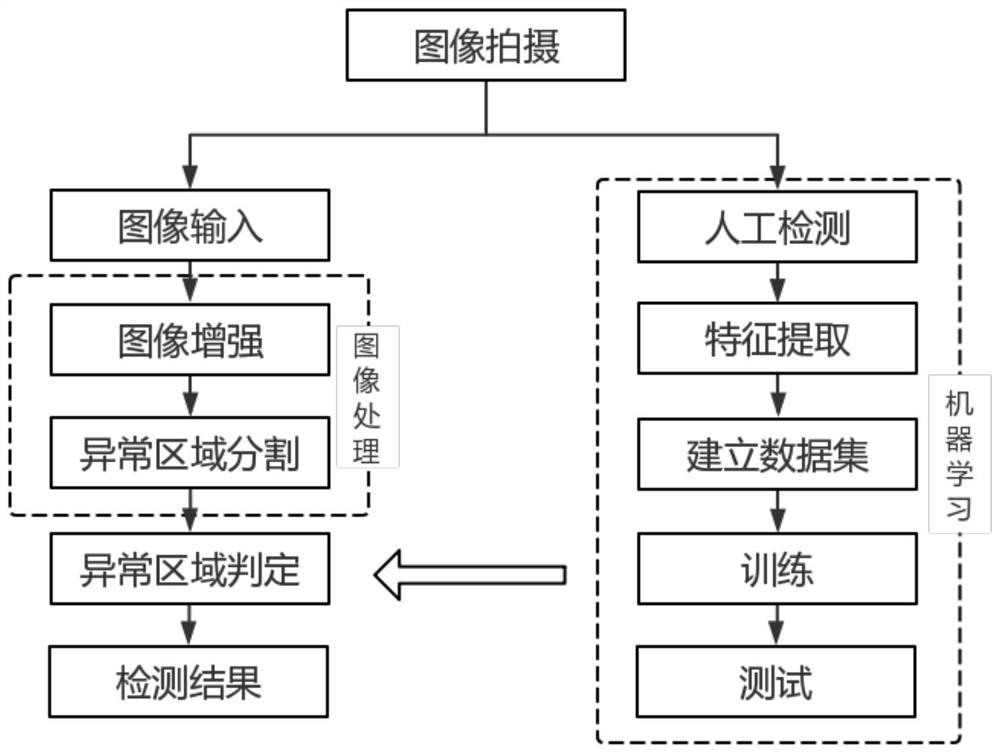
图2是本发明的流程图
具体实施方式
本发明的一种基于红外热成像仪的玻璃幕墙检测方法,如图2所示,包括如下步骤:
步骤1,利用无人机搭载的红外热像仪对幕墙进行图像拍摄,形成红外图像训练样本集并进行机器学习,红外图像训练样本集包括红外图像训练正样本集和红外图像训练负样本集。所述红外图像训练正样本集是指存在缺陷、且温异常的玻璃幕墙所对应的红外图像,所述红外图像训练负样本集是指不存在缺陷、但温度异常的玻璃幕墙对应的红外图像。
无人机采用普通四旋翼无人机,四旋翼无人机灵活性、稳定性高,控制简单。测量人员通过遥控器对其进行控制,利用红外热像仪对玻璃幕墙进行拍摄。
红外热像仪是由热像检测装置、热像控制装置和图像处理分析、储存、输出装置等外围设备组成的一套仪器。如图1所示,其成像过程的基本原理是将被测物体所辐射出的红外线能量,由物镜收集后,经扫描器聚集到红外线探测器上,继而转换成电信号,再经放大器和信号处理机处理,输出能够反映物体表面温度分布场的电子视频信号,在终端显示器上以伪彩形式显示出来,成为我们所见的红外图像。拍摄过程中将获得整个玻璃幕墙温度的红外图像,并存储于红外热像仪中。
对拍摄的玻璃幕墙进行人工检测,找到存在缺陷、且温度异常的璃幕墙;将存在缺陷且温度异常的玻璃幕墙所对应的红外图像作为正样本集,将不存在缺陷、但温度异常的玻璃幕墙所对应的红外图像作为负样本集,利用红外图像训练正样本集和红外图像训练负样本集对支持向量机模型进行训练和测试,并获得训练后的支持向量机模型,训练后的支持向量机模型可以完成对输入的待测红外图像进行分类。
所述支持向量机(Support Vector Machines,SVM)是一种机器学习算法模型。给定数据并进行训练后,SVM算法得到一个最优超平面,从而对数据进行分类。
在OpenCV中使用支持向量机模块时,需要先使用函数cv2.ml.SVM_create()生成用于后续训练的空分类器模型。该函数的语法格式为:
svm=cv2.ml.SVM_create()
之后使用svm.train()函数对训练数据进行训练,其语法格式为:
训练结果=svm.train(date,cv2.ml.ROW_SAMPLE,label)
完成训练后,使用svm.predict()函数即可使用分类器模型对输入数据进行分类,其语法格式为:
(返回值,返回结果)=svm.predict(测试数据)
步骤2,利用无人机搭载的红外热像仪对待检测幕墙进行图像拍摄,形成侍测红外图像集。
步骤3,对待测红外图像集进行图像处理。
本发明的图像处理部分在电脑中完成,需使用OpenCV、Numpy等库。红外热像仪拍摄结束后,将存储于红外热像仪内部的图像传输至电脑,进行后续的图像处理。
OpenCV是一个开源的计算机视觉和机器学习软件库,提供了大量的图像处理算法。Numpy则是一种开源的数值计算扩展,可用来存储和处理大型矩阵,支持大量的维度数组与矩阵运算,同时针对数组运算提供大量的数学函数库。
步骤3.1对待测红外图像集进行图像增强处理以及去噪处理,形成去噪后待测红外图像集;
图像增强一般分为基于空域和基于频域的增强技术。空域增强直接对图像的像素进行处理,频域增强是指先将图像变换到频域,然后在频域内进行图像处理,最后再通过反变换将图像从频域变换到空域。傅里叶变换是应用最广泛的一种频域变换。
本发明利用Python中的Numpy库实现图像的傅里叶变换及傅里叶逆变换,具体语法格式如下:
返回值=numpy.fft.fft2(原始图像)
返回值=numpy.fft.ifft2(频域数据)
为了保证后续目标分割识别的准确性,必须对待测红外图像集进行去噪处理,在尽量保留图像原有信息的情况下,过滤掉图像内部的噪声。去噪处理会对图像中与周围像素点差异较大的像素点进行处理,将其值调整为周围像素点像素值的近似值。常用的去噪处理方法包括高斯滤波、中值滤波和双边滤波。
高斯滤波将中心点的权重值加大,远离中心点的权重值减小,在此基础上计算领域内各个像素值的不同权重的和。
在OpenCV中,实现高斯滤波的函数语法格式是:
dst=cv2.GaussianBlur(src,ksize,sigmaX,sigmaY,borderType)
式中:
dst是返回值
src是原始图像
ksize是滤波核大小
sigmaX是卷积核在水平方向上的标准差
sigmaY是卷积核在垂直方向上的标准差
borderType是边界样式
步骤3.2采用图像分割算法将去噪后待测红外图像集中的红外图像温度异常区域分割出来,形成温度异常区域红外图像集;
对去噪后红外图像将温度异常区域分割出来。图像分割算法主要分为两类:基于边缘检测方法和基于阈值分割的方法。常见的边缘检测方法是微分算子方法,边缘特征提取的微分算子主要有Roberts算子、Sobel算子、Prewitt算子、Canny算子等。
Canny算子边缘检测方法分为如下几个步骤:
步骤3.2.1:计算去噪后待测红外图像集中图像的梯度和幅度;
图像在经过高斯滤波后需要计算图像的梯度和幅度,公式如下:
Θ=atan2(G
步骤3.2.2:步骤3.2.2:判断当前像素点是否是周围像素点中具有相同梯度方向的最大值,如果是,进行非极大值抑制;
在获得梯度的幅度和方向后,逐一遍历像素点,判断当前像素点是否是周围像素点中具有相同梯度方向的最大值,并根据判断结果决定是否抑制该点。
步骤3.2.3:应用双阈值确定温度异常区域边缘,并形成形成温度异常区域红外图像集。
设置两个阈值,根据当前边缘像素的梯度值与这两个阈值之间的关系,判断温度异常区域边缘的属性。
在OpenCV中实现Canny边缘检测的函数语法格式是:
edges=cv.Canny(image,threshold1,threshold2[,apertureSize[,L2gradient]])
式中:
edges为计算得到的边缘图像
image为8位输入图像
threshold1、threshold2分别表示两个阈值
apertureSize表示Sobel算子的孔径大小
L2gradient为计算图像梯度幅度的标识
步骤3.3,将没有温度异常区域的红外图像舍弃,否则,图片太多,处理量太大,温度异常区域红外图像集作为输入进行后续的特征提取。
步骤4,温度异常区域红外图像分类
由于环境因素影响,温度异常区域红外图像依旧可能存在错误信息,例如,温度异常但不存在缺陷的情况。在图像识别中,本发明从具有温度异常区域的红外图像的原始数据提取有用的特征后进行分类,判断是否存在缺陷,所述原始数据是指图像自身的灰度值。
步骤4.1,对具有温度异常区域的红外图像,利用进行红外图像灰度直方图特征提取。
特征提取的过程就是将图像中包含的信息映射到一个相对低维的空间,并且这个映射的过程要保证图像的信息能够较为完整地保留下来,而仅仅去除多余的不必要的图像信息。
本发明利用红外图像灰度直方图特征作为统计特征。所述灰度直方图是对图像中灰度级的统计,是图像本身的属性,因为红外图像反映的是温度,所以本文中是对图像中温度值的分布统计。灰度直方图可从红外图像中直接提取出来。
步骤4.2,将红外图像灰度直方图输入到训练后的支持向量机模型中,进行分类,将温度异常且存在缺陷的玻璃幕墙的红外图像区分出来,将温度异常但没有缺陷的玻璃幕墙的红外图像舍弃,更准确的区分出确实存在缺陷的玻璃幕墙所对应的红外图像,根据红外图像,安排工作人员对玻璃幕墙实际缺陷区域进行检查修理。
对于分类学习有许多分类方法,其中最常见也是应用最广的两种分类器,BP神经网络和支持向量机(SVM)。支持向量机是一种二分类模型。
- 一种基于红外热成像仪的玻璃幕墙检测方法
- 一种基于动态红外热像图处理的地下管廊渗漏检测方法