一种基于模型预测控制的船舶推进系统燃油控制方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明属于船舶推进系统控制技术领域,涉及船舶推进系统燃油的控制的方法,具体涉及一种基于数据驱动系统辨识和模型预测控制的船舶系统燃油控制改进方法,可以提升船舶推进系统的燃油性能,减少燃油消耗,降低成本。
背景技术
推进系统是船舶的重要组成部分,具体包括了推进主轴和船用柴油机。船舶航运的经济成本主要取决于船舶推进系统的性能,据统计,在远洋航运中燃油成本约占了总成本的75%,因此,针对船舶推进系统设计控制器以优化经济性能是有意义的。
现有的针对船舶推进系统设计经济性能控制器的方法主要是基于推进系统的模型,寻找使燃油消耗达到极小值的柴油机转速。现有的推进系统的模型传统上是经验模型,要求工程师有很丰富的工程经验,并且会耗费大量精力。近年来,随着计算机计算能力的不断提升,数据驱动的建模方法得到了广泛的关注,使用神经网络等建模方法进行船舶推进系统燃油的控制,可以大大缩短建模所需的精力。但是,不管是现有的经验模型还是数据驱动建模方法,通常都具有很强的非线性,这样就导致在求解最小化燃油消耗问题时,往往只能使柴油机转速到达一个局部最优值而非全局最优,限制了运行成本的进一步降低。
发明内容
为了克服上述现有技术的不足,本发明提供了一种基于模型预测控制的船舶推进系统燃油控制方法,实现基于数据驱动系统辨识的改进的模型预测控制,减少燃油消耗,提升船舶推进系统的燃油效率,降低成本。
本发明首先通过数据驱动的方法辨识得到船舶推进系统的动态辨识模型,然后基于动态辨识模型设计模型预测控制器,并对模型预测控制律的次优程度进行估计,最后根据对次优程度的估计修正模型预测控制律,以提升性能。本发明的创新之处在于估计了模型预测控制律的次优程度,并对模型预测控制律次优程度的估计改进控制方法,使柴油机转速进一步逼近全局最优值。现有的燃油控制技术是通过调整模型预测控制器,以达到更好的控制效果;而本发明考虑到模型预测控制器本身存在的控制次优性,提出一种易于工程实现的次优性估计方法,依据该次优估计修正模型预测控制器的输出,从而实现更高效的控制燃油效果。本发明在实际应用中,对船舶推进系统的燃油控制回路并不会构成风险,因为当本发明提出的基于次优程度估计的改进的模型预测控制算法有解时,可以提升燃油效率;当控制算法无解时,将传统的模型预测控制律作用于船舶推进系统,不会使推进系统失稳或性能衰退。
本发明提出的基于模型预测控制的船舶推进系统燃油控制方法能够达到性能提升技术效果,其原理为:因为传统模型预测控制器的预测步长有限,无法在可行集
本发明提供的技术方案是:
一种基于模型预测控制的船舶推进系统燃油控制方法,是一种基于数据驱动系统辨识改进的模型预测控制方法,使用船舶推进系统的历史数据建立动态辨识模型,作为模型预测控制器的预测模型,构造船舶推进系统的模型预测控制器,得到次优解,再根据模型预测控制器的参数,如预测步长和采样时间,得到对传统的模型预测控制律的次优程度的估计,并修正传统的模型预测控制律,使之逼近全局最优控制律。包括离线过程和在线过程,离线过程包括数据驱动的系统辨识及模型预测控制器次优程度的估算与量化;在线部分包括控制律的改进;主要包括如下步骤:
1)建立关键性能指标,关键性能指标反映推进系统燃油消耗情况;具体以燃油消耗率为关键性能指标,作为模型预测控制的目标函数;
在实际工程中,常用燃油消耗率来描述船舶推进系统的油耗水平:
其中,
2)使用历史数据进行建模,建立船舶推进系统的动态辨识模型;
由于船舶推进系统在实际运行过程中是多种复杂热力过程的耦合,所以使用机理建模的方法是极其困难的,因此使用监测到的实际运行数据,运用神经网络或多项式拟合等方法,建立船舶推进系统的黑箱模型在工程中是一种常用的方法。
本发明使用稀疏回归的方法建立数据动态辨识模型,该方法实际操作简单,建模精度相对较高,适合在工程实践中使用。
基于稀疏回归的模型辨识方法包括如下步骤:
21)建立变量之间的输入输出关系,确定待辨识模型的形式;
船舶推进系统的模型辨识主要考虑四个过程参数:轴功率p(kW),主机消耗燃油流量c(ton/h),主机转速r(rpm)和主机入口燃油流量l(ton/h)。其中,轴功率是柴油机的动力性能指标,用来衡量柴油机输出动力;主机消耗燃油流量是单位时间内柴油机的耗油量;主机转速是柴油机曲轴每分钟的回转数,是决定柴油机工作状态的关键参数;主机入口燃油流是单位时间内流入柴油机气缸的燃油量,在本发明中作为辅助控制变量。在模型预测控制器中,船舶推进系统的动态过程使用如下离散非线性状态空间方程:
其中,
22)使用历史数据构造数据矩阵;
使用回归方法辨识系统模型需要按如下方法构造输入矩阵:
其中,
其中,Y为由采样时刻是t
23)建立非线性库;
非线性库的构造是稀疏回归方法的核心。库中包含多种非线性项,使用这些非线性项的线性组合逼近推进系统的非线性动态,模型参数就是组合系数。因此,非线性项的选择对于系统辨识的精度有着很大的影响。本发明使用有关轴功率p,主机消耗燃油流量c,主机转速r和主机入口燃油流量l的历史数据的一次方项、二次方项和三次方项组成非线性库:
其中,P
P
24)基于数据矩阵,使用LASSO(Least Absolute Shrinkage and SelectionOperator)方法辨识模型;
输入输出关系的辨识方程可以表示为:
Y=Θ(X,U)Ξ (式10)
其中,Y的含义同(式5);Ξ是待辨识的模型参数,Ξ=[ξ
使用LASSO回归求解(式10)以保证稀疏性,表示如下:
其中,Y
当辨识得到Ξ之后,设在线采集到的新样本为
通过步骤21)~24)可构造船舶推进系统的非线性动态方程,得到船舶推进系统的动态模型。
3)建立船舶推进系统的模型预测控制器;
由于模型预测控制可以处理控制和状态的约束,在工业过程中已经得到广泛的应用。本发明基于模型预测控制律,首先针对船舶推进系统构造如下的传统模型预测控制器:
其中,
传统模型预测控制的决策变量是控制序列,记为u(k);在u(k)的作用下有限步长优化问题的值函数记为
4)根据求解得到的模型预测控制器的参数,估计模型预测控制器的次优程度;
对于非线性预测模型来说,由于通过传统的模型预测控制器求解的是有限步长的优化问题,无法通过无限步长激励出预测模型的全部信息,因此求解传统模型预测控制器得到的控制律是次优的。本发明使用次优估计α来量化传统模型预测控制器的次优程度,其定义为:
其中,
本发明提出的估计传统模型预测控制器次优性的方法如下:
将模型预测控制器的次优性(次优估计α)参数化,表示为:
α=1+Γ-ΩΓ (式13)
其中,
(式13)是一个便于计算的代数方程,方程中的β是本发明提出的控制器次优性估计方法中的关键参数,β可通过历史数据构造得到。具体地,针对历史数据中的每一个样本
其中,M是小于等于预测步长N的正整数;
β=max
此时,已经得到对传统模型预测控制器次优性(次优程度)的估计。
本发明对控制器次优性的估计方法是一种易于工程实现的次优估计方法,可推广应用于工程实施。
5)根据次优估计修正传统模型预测控制器输出的控制律;
本发明通过降低传统模型预测控制器的最优值函数来提升船舶推进系统的性能。传统的模型预测控制器有如下的性质:
其中,
其中,α≤ε≤1。当ε=α时,是最优的性能提升。使性能得到提升的控制律的集合定义为(式18):
控制律落在集合
在实际工程中,希望达到性能提升的极限,因此将下式作为新的约束条件添加到传统模型预测控制中:
满足(式20)的控制集合记为
通过步骤1)~5),即实现基于模型预测控制的船舶推进系统燃油控制。
与现有技术相比,本发明的有益效果是:
本发明提供一种基于数据驱动系统辨识和模型预测控制的船舶系统燃油控制改进方法,将工程上常用的燃油消耗率作为模型预测控制器的优化目标,再使用历史数据建立推进系统的动态辨识模型,构造传统模型预测控制器后,估计并量化传统控制律的次优程度,以次优估计为依据修正传统模型控制器的控制律,从而提升船舶推进系统的燃油性能,减少燃油消耗,降低成本,由此提高船舶推进系统的经济性能。
附图说明
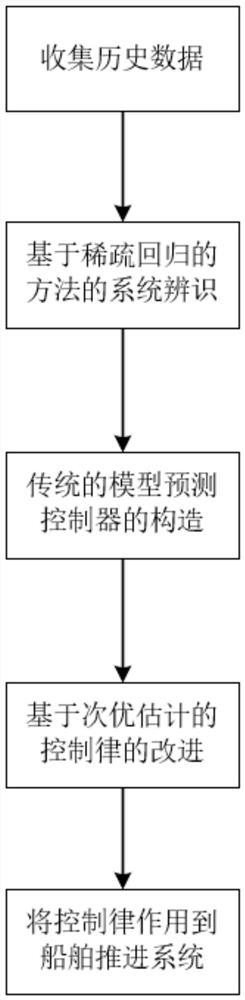
图1为本发明提出的一种基于模型预测控制的船舶推进系统燃油控制方法的总体流程框图。
图2为本发明提出的数据驱动系统辨识方法的流程框图。
图3为本发明提供的基于次优估计控制策略改进的示意图。
图4为本发明方法具体实施的算法流程框图。
具体实施方式
下面结合附图,通过实施例进一步描述本发明,但不以任何方式限制本发明的范围。
本发明提供一种基于模型预测控制的船舶推进系统燃油控制方法,是一种基于数据驱动系统辨识改进的模型预测控制方法,使用船舶推进系统的历史数据建立动态辨识模型,作为模型预测控制器的预测模型,构造船舶推进系统的模型预测控制器,得到次优解,再根据模型预测控制器的参数,如预测步长和采样时间,得到对传统的模型预测控制律的次优程度的估计,并修正传统的模型预测控制律,使之逼近全局最优控制律以提升推进系统的经济性能。
本发明方法包括离线过程和在线过程,离线过程包括数据驱动的系统辨识及模型预测控制器次优程度的估算与量化;在线部分包括控制律的改进。图1所示为本发明提出的基于数据驱动系统辨识的模型预测控制的推进系统燃油控制提升经济性能的方法流程。图2所示为本发明提出的数据驱动系统辨识的方法流程。以下实施例首先用真实船舶推进系统的监测数据按照图2的步骤进行数据驱动系统辨识,设计完成传统的模型预测控制器之后,再根据次优估计修正传统的模型预测控制律的控制律进行船舶推进系统的燃油控制,由此提升船舶推进系统的经济性能。具体实施包括如下步骤:
1)建立关键性能指标,关键性能指标反映推进系统燃油消耗情况;具体以燃油消耗率为关键性能指标,作为模型预测控制的目标函数;
在实际工程中,常用燃油消耗率来描述船舶推进系统的油耗水平:
其中,
2)使用历史数据进行建模,建立船舶推进系统的动态辨识模型;
由于船舶推进系统在实际运行过程中是多种复杂热力过程的耦合,所以使用机理建模的方法是极其困难的,因此使用监测到的实际运行数据,运用神经网络或多项式拟合等方法,建立船舶推进系统的黑箱模型在工程中是一种常用的方法。
本发明使用稀疏回归的方法建立数据动态辨识模型,该方法实际操作简单,建模精度相对较高,适合在工程实践中使用。
基于稀疏回归的模型辨识方法包括如下步骤:
21)建立变量之间的输入输出关系,确定待辨识模型的形式;
船舶推进系统的模型辨识主要考虑四个过程参数:轴功率p(kW),主机消耗燃油流量c(ton/h),主机转速r(rpm)和主机入口燃油流量l(ton/h)。其中,轴功率是柴油机的动力性能指标,用来衡量柴油机输出动力;主机消耗燃油流量是单位时间内柴油机的耗油量;主机转速是柴油机曲轴每分钟的回转数,是决定柴油机工作状态的关键参数;主机入口燃油流是单位时间内流入柴油机气缸的燃油量,在本发明中作为辅助控制变量。在模型预测控制器中,船舶推进系统的动态过程使用如下离散非线性状态空间方程:
其中,
22)使用历史数据构造数据矩阵;
使用回归方法辨识系统模型需要按如下方法构造输入矩阵:
其中,
其中,Y为由采样时刻是t
23)建立非线性库;
非线性库的构造是稀疏回归方法的核心。库中包含多种非线性项,使用这些非线性项的线性组合逼近推进系统的非线性动态,模型参数就是组合系数。因此,非线性项的选择对于系统辨识的精度有着很大的影响。本发明使用有关轴功率p,主机消耗燃油流量c,主机转速r和主机入口燃油流量l的历史数据的一次方项、二次方项和三次方项组成非线性库:
其中,P
P
24)基于数据矩阵,使用LASSO(Least Absolute Shrinkage and SelectionOperator)方法辨识模型;
输入输出关系的辨识方程可以表示为:
Y=Θ(X,U)Ξ (式10)
其中,Y如(式5)所示;Ξ是待辨识的模型参数,Ξ=[ξ
使用LASSO回归求解(式10)以保证稀疏性,表示如下:
其中,Y
当辨识得到Ξ之后,设在线采集到的新样本为
通过步骤21)~24)可构造船舶推进系统的非线性动态方程,得到船舶推进系统的动态模型。
3)建立船舶推进系统的模型预测控制器;
由于模型预测控制可以处理控制和状态的约束,在工业过程中已经得到广泛的应用。本发明基于模型预测控制律,首先针对船舶推进系统构造如下的传统模型预测控制器:
其中,
传统模型预测控制的决策变量是控制序列,记为u(k);在u(k)的作用下有限步长优化问题的值函数记为
4)根据求解得到的模型预测控制器的参数,估计模型预测控制器的次优程度;
对于非线性预测模型来说,由于通过传统的模型预测控制器求解的是有限步长的优化问题,无法通过无限步长激励出预测模型的全部信息,因此求解传统模型预测控制器得到的控制律是次优的。本发明使用次优估计α来量化传统模型预测控制器的次优程度,其定义为:
其中,
本发明提出的估计传统模型预测控制器次优性的方法如下:
将模型预测控制器的次优性(次优估计α)参数化,表示为:
α=1+Γ-ΩΓ (式13)
其中,
(式13)是一个便于计算的代数方程,方程中的β是本发明提出的控制器次优性估计方法中的关键参数,β可通过历史数据构造得到。具体地,针对历史数据中的每一个样本
其中,M是小于等于预测步长N的正整数;
β=max
此时,已经得到对传统模型预测控制器次优性(次优程度)的估计。
本发明对控制器次优性的估计方法是一种易于工程实现的次优估计方法,可推广应用于工程实施。
5)根据次优估计修正传统模型预测控制器输出的控制律;
本发明通过降低传统模型预测控制器的最优值函数来提升船舶推进系统的性能。传统的模型预测控制器有如下的性质:
其中,
其中,α≤ε≤1。当ε=α时,是最优的性能提升。使性能得到提升的控制律的集合定义为(式18):
控制律落在集合
在实际工程中,希望达到性能提升的极限,因此将下式作为新的约束条件添加到传统模型预测控制中:
满足(式20)的控制集合记为
通过步骤1)~5),即实现基于模型预测控制的船舶推进系统燃油控制。
图3示意了本发明根据次优估计改进传统的模型预测控制律,其中实线圆圈代表集合
图4所示为本发明方法的整体流程,船舶推进系统燃油控制提升经济性能的方法分为离线和在线两部分,离线过程包括数据驱动的系统辨识、模型精度的测试以及传统模型预测控制器次优程度的估算与量化;在线部分为传统控制律的改进。针对实际船舶推进系统应用如下算法以提升经济性能。
综上描述的具体实施方法便实现了基于数据驱动系统辨识的模型预测控制的传船舶推进系统经济性能的提升。
需要注意的是,公布实施例的目的在于帮助进一步理解本发明,但是本领域的技术人员可以理解:在不脱离本发明及所附权利要求的精神和范围内,各种替换和修改都是可能的。因此,本发明不应局限于实施例所公开的内容,本发明要求保护的范围以权利要求书界定的范围为准。
- 一种基于模型预测控制的船舶推进系统燃油控制方法
- 一种基于模型预测控制的燃料电池控制方法和系统