电镜定量消除像散的方法
文献发布时间:2023-06-19 11:19:16
技术领域
本发明涉及电镜像散校正领域,特别是电镜定量消除像散的方法。
背景技术
冷冻电镜在结构生物学发展中的地位越来越重要,对于冷冻电镜快速高质量进行单颗粒数据收集方面大家已经做了很多努力,但是对于影响数据质量的图像象散,仍然无法实现在线反馈、实时的调整。象散是影响衬度传递函数的重要影响因素之一,象散越小,获得的CTF将越准确,将会影响最终的数据处理结果。
数据照片的象散是影响照片质量和随后的结果确定的重要影响因素,在数据收集过程中有效的减小照片的象散是非常重要的。目前在实际操作中,消像散主要采用三种方法,分别是1、在欠焦和过焦状态下观察非晶膜的相位衬度像的颗粒不具有方向性时,即认为无象散。2、在欠焦状态下,观察小孔周围的菲涅尔条纹的均称性,需要将菲涅尔条纹调整到匀称,说明不具有象散;3、通过连续快速傅里叶变换借助CCD或者CMOS相机观察索恩环的圆度,越圆象散越小。三种方法的共同性就是都是需要反复调整,依赖于操作人员眼睛的敏锐程度和熟练程度,无法保证数据象散是该电镜对该样品所能达到的最优值。由于存在人眼分辨的误差,因此残余的象散无法确定,并且三种方法无法在大量数据收集过程中,实现实时的象散调整。
发明内容
为解决现有技术中存在的问题,本发明提供了电镜定量消除像散的方法,解决了以往消除像散精度低、速度慢的问题。
本发明提供了电镜定量消除像散的方法,包括以下步骤:
S1:收集电镜照片,定义电镜照片的坐标系;
S2:在S1后,进一步,通过计算获得照片最大欠焦值D1、最小欠焦值D2和像散角θ;
S3:测量电镜每个像散器调整量与像散值改变的线性关系;
S4:在S3后,进一步,在像散值最小时,通过连续改变一个像散器调整的像散值,获取系列照片;
S5:在S4后,进一步,计算获得的定量像散器调整值下的像散值,找出像散值与像散器调整值的关系;
S6:在S1-S5后,将数据照片计算出的最大欠焦值D1、最小欠焦值D2和像散角θ按数学方法分别分解到两个像散器上,得出像散器X和像散器Y的调整值;
S7:在S6结合S3后,计算获得各个像散器调整值下的像散值,找出像散值与像散器调整值的关系;
S8:在S7后,进一步将像散值与像散器调整值的关系反馈到电镜,自动调整,实现定量像散消除。
优选地,S6中X方向像散的表达式为:
式中,D1表示最大欠焦轴,D2表示最小欠焦轴,θ表示像散角,α表示像散器Sx的横坐标与图像水平轴X
优选地,S6中Y方向的像散的表达式为:
式中,D1表示最大欠焦轴,D2表示最小欠焦轴,θ表示像散角,β表示像散器Sy的横坐标与图像水平轴X
优选地,S7包括以下子步骤:
S71:令X像散器上像散无限大,确定α角;
S72:确定X像散器调整量与x像散器像散消除直线关系,像散最小,连续调整x像散器D
S73:令X像散器上像散无限大,确定β角;
S74:确定y像散器调整量与x像散器像散消除直线关系,像散最小,连续调整y像散器D
S75:将获得的α,a1,b1,β,a2,b2,代入ΔSx和ΔSy中,
式中,b1表示x像散器像散改变量与调整步长之间直线关系的斜率,a1表示x像散器像散改变量与调整步长之间直线关系的截距,b2表示像散器像散改变量与调整步长之间直线关系的斜率,a2表示y像散器像散改变量与调整步长之间直线关系的截距,D1表示最大欠焦轴,D2表示最小欠焦轴,θ表示像散角,α表示像散器Sx的横坐标与图像水平轴X
本发明电镜定量消除像散的方法的有益效果如下:
本发明通过将像散分解到像散器上的方法,实现像散定量消除,比传统靠人眼判断消除像散精度高,速度快。
附图说明
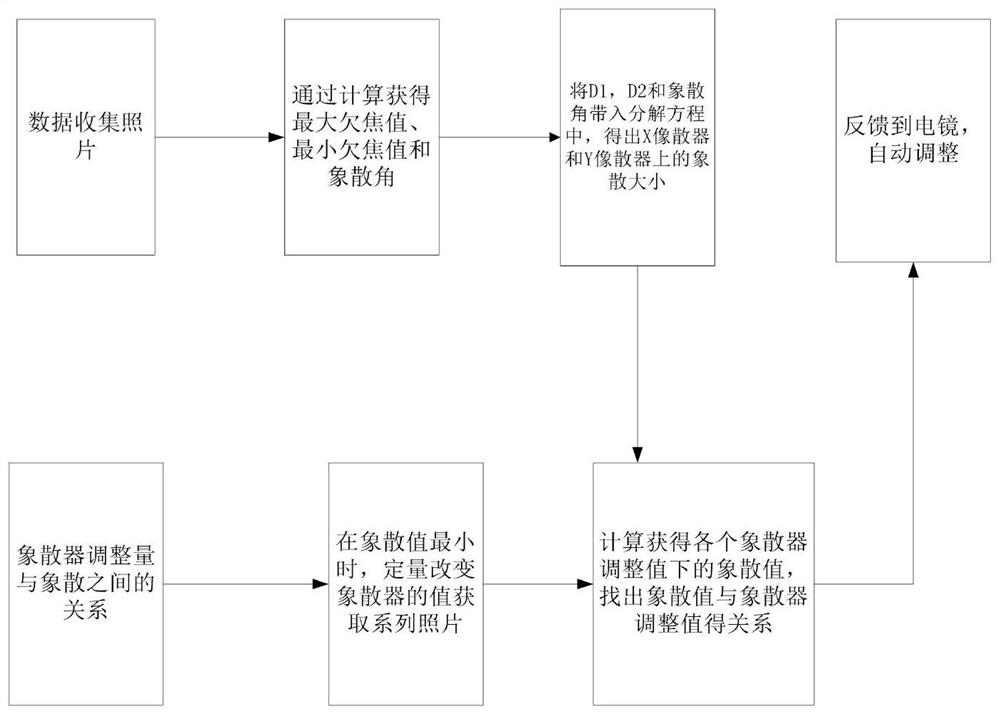
图1为本发明电镜定量消除像散的方法的流程图。
图2为本发明电镜定量消除像散的方法的透射电镜中物镜的象散参数调整界面。
图3为本发明电镜定量消除像散的方法的Sx连续增加量与象散值Dx与调整步长的关系图。
图4为本发明电镜定量消除像散的方法的Sy连续增加量与象散值Dy与调整步长的关系图。
图5为本发明电镜定量消除像散的方法的确定α和β角图。
图6为本发明电镜定量消除像散的方法的全流程图。
图7为本发明电镜定量消除像散的方法的参数代入公式求得的实例。
具体实施例
下面对本发明的具体实施方式进行描述,以便于本技术领域的技术人员理解本发明,但应该清楚,本发明不限于具体实施方式的范围,对本技术领域的普通技术人员来讲,只要各种变化在所附的权利要求限定和确定的本发明的精神和范围内,这些变化是显而易见的,一切利用本发明构思的发明创造均在保护之列。
电镜定量消除像散的方法,如图1所示,第一步:测量电镜每个像散器调整量与像散值改变的线性关系;
第二步:测定像散器消除像散的方向与图像照片的夹角。在无像散状态下,通过连续改变一个像散器调整的像散值,计算得出像散角;
第三步:将照片像散按数学方法分解到像散器上,获得每个像散器上的方程;
第四步:对于数据照片,计算获得像散参量,D1,D2和像散角,即可实现定量像散消除。
本实施方案在实施时,图2(a)中Stigmator内Objective是透射电镜中物镜消像散器的控制界面,透射电镜中物镜消像散器是由象散器x(Sx,多功能钮x控制)和象散器y(Sx,多功能钮x控制)2个象散器组成的,图2(b)中x对应的为Sx的当前值,y对应的为Sy的当前值。Sx图2(c)和Sy图2(d)的结构是一样的,都是由一个四极子组成的,成45°角上下放置的。每一个象散器对物镜的象散都是可以连续调整的。在原理上是相互独立,没有干扰的。
2、定义照片坐标系(X
在象散坐标系,对于x象散器上Dx1(x Dx1,y Dx1),Dx2(xDx2,yDx2)在椭圆象散上,则有如下关系成立:
Dx1,Dx2椭圆象散坐标系内为两条直线方程,则:
Dx1和Dx2的欠焦值大小为:
联立方程(1)(2)(3)得到:
已知:Sx上象散Dx为:
D
将方程(4)代入方程(5)中,则:
同理在象散坐标系,对于y象散器上Dy1(xDy1,yDy1),Dy2(xDy2,yDy2)在椭圆象散上,则有如下关系成立:
Dy1,Dy2椭圆象散坐标系内为两条直线方程,则:
Dy1和Dy2的欠焦值大小为:
联立方程(7)(8)(9)得到:
已知:Sy上象散Dy为:
D
将方程(4)代入方程(5)中,则:
将(8)(14)代入(2)式得:
3、象散器是独立的,而且调整量与象散之间成y=a+bx线性关系,因此对于任意象散可以分解为在象散器x上的Dx和在象散器y上的Dy。ΔSx和ΔSy分别对应x象散器和y象散器上的调整值,则存在:
也就是说
4、确定a1,a2,b1,b2的值
首先将象散值调整到最好,然后以step 0.01连续调整象散器x的值,得到相应的Dx1和Dx2的欠焦值,欠焦值与调整的步长成线性关系。计算得到相应的象散值,该象散值与step成线性关系。
如图3所示,当Sx连续增加量由-0.2到0.2时,象散值Dx与调整步长的关系为Equation y=a+bx,通过数据拟合,得到:Dx=-24.8-3226.04ΔSx,即:a1=-24.8,b1=-3226.04
即:
如图4所示,对于y轴,当Sy连续增加量由-0.2到0.2时,象散值Dy与调整步长的关系为Equation y=a+bx,通过数据拟合,得到:Dy=-0.6-3092.1ΔSy,即a2=-0.6,b2=-3092.1
即:
5、确定α和β角
如图5所示,对于x象散器上象散分量Dx1与照片x轴夹角α角的确定,首相将象散调整到最好,此时Dx1≈Dx2≈Dy1≈Dy2,然后沿一个方向逐渐减小Sx值,这时只有x方向象散,当x方向象散足够大时,此时Dy1≈Dy2,Dx1>>Dx2,采用ctffind 4计算得出的欠焦值D1就是Dx1方向上的欠焦值,欠焦值D2就是Dx2方向上的欠焦值(取值范围在1.6D2≤D1≤2D2),象散角θ就是x象散器上Dx1与图片x轴的夹角α,该方法连续多次计算确定获得的θ角是一样,即为67.4°。因此x象散器上Dx1与图片x轴的夹角α为67.4°
对于x象散器上象散分量Dx2与照片x轴夹角α′角的确定,首相将象散调整到最好,此时Dx1≈Dx2≈Dy1≈Dy2,然后沿一个方向逐渐增加Sx值,这时只有x方向象散,当x方向象散足够大时,此时Dy1≈Dy2,Dx1< 同理,对于y象散器上象散分量Dy1与照片x轴夹角β角的确定,首相将象散调整到最好,此时Dx1≈Dx2≈Dy1≈Dy2,然后沿一个方向逐渐增加Sy值,这时只有y方向象散,当y方向象散足够大时,此时Dx1≈Dx2,Dy1>>Dy2,采用ctffind 4计算得出的欠焦值D1就是Dy1方向上的欠焦值,欠焦值D2就是Dy2方向上的欠焦值(取值范围在1.6D2≤D1≤2D2),象散角θ就是y象散器上Dy1与图片x轴的夹角β,该方法连续多次计算确定获得的θ角是一样,即为22.3°。因此y象散器上Dy1与图片x轴的夹角β为22.3°。 对于y象散器上象散分量Dy2与照片x轴夹角β′角的确定,首相将象散调整到最好,此时Dx1≈Dx2≈Dy1≈Dy2,然后沿一个方向逐渐减小Sy值,这时只有y方向象散,当y方向象散足够大时,此时Dx1≈Dx2,Dy1< 6、验证α和β角 另外我们知道两个象散器是成45°摆放的,计算得出的67.4°-22.3°=45.1°和-19.1°-(-63.6°)=44.5°,与设计摆放误差之间的误差分别为0.2%和1%,可以忽略不计。从这方面说,这种方法获得的象散器空间位置角是正确的。 7、如图6所示,将参数带入下面公式,就获得调整量ΔS 在获得这些参数之后,
图7为本发明电镜定量消除像散的方法的参数代入公式求得的实例。
- 电镜定量消除像散的方法
- 电镜定量消除像散的方法