一种兽医用犬类手术固定装置及其使用方法
文献发布时间:2023-06-19 11:21:00
技术领域
本发明涉及兽医手术类技术领域,具体为一种兽医用犬类手术固定装置及其使用方法。
背景技术
兽犬的种类有很多,这一类动物均属于脊椎动物中的哺乳纲,都是由爬行类进化而来的,从进化的程度来说,可分为原兽类,如鸭嘴兽、针鼹等卵生动物,它们是兽类中最原始的一类,其次是后兽类,这一类动物虽较原兽类进化程度高些,但也属于古老低等的一类,如有袋类动物,它们虽然是胎生,但没有胎盘,幼兽是在母兽的育儿袋中发育成长的,最后是真兽类,它们是现生兽类中最高等的哺乳动物,是脊椎动物甚至整个动物界中进化地位最高的类群,但是兽犬在日常的生活中,会存在生病的情况,手术固定装置因此而诞生,便于手术的展开。
兽犬在手术时,由于兽犬天性比较凶恶,所以需要对其四肢进行固定,防止挣脱,但是兽犬在固定的过程中,现有技术不便于调节间距,从而不能适用于不同大小的兽犬,而且,也不便于根据兽医的升高去调节工作台的高度,从而导致该装置使用率低。
发明内容
本发明解决的技术问题在于克服现有在使用过程中不便于调节工作台的高度,还不便于调节间距,从而适用于不同大小的间距,导致功能单一、使用不便等缺陷,提供一种兽医用犬类手术固定装置及其使用方法。所述一种兽医用犬类手术固定装置及其使用方法具有功能多样、使用便捷等特点,在使用过程中,便于调节工作台的高度等特点。
为实现上述目的,本发明提供如下技术方案:一种兽医用犬类手术固定装置,包括底板,所述底板的顶部固定连接有若干个第一伸缩杆,且若干个所述第一伸缩杆设置有四个,四个所述第一伸缩杆以底板顶部为中心呈左右前后对称设置,且四个所述第一伸缩杆的顶端共同固定连接有手术台,所述手术台内腔底部靠近中心位置处开设与开口,且所述开口上活动连接有第一轴承,所述手术台内腔中心位置靠近上方处设有调节机构,且所述手术台的左侧靠近上方处固定连接有半包框,且所述半包框的内腔活动连接有半包存储框,所述半包存储框的左侧固定连接有按压块,且所述按压块位于半包框的外侧处,且所述半包存储框的内腔设有若干个放置板,且若干个所述放置板的两侧均固定连接有卡块,且所述卡块运离放置板的一侧活动连接有U形卡接板,且所述U形卡接板远离卡块的一侧均与半包存储框固定连接,所述半包存储框底部靠近中心位置处固定连接有固定块,且所述半包框内腔的底部设有拿取机构,所述手术台底部中心位置处设有升降机构,所述手术台顶部左右两侧靠近后侧处均活动连接有第二顶板,且所述手术台顶部左右两侧靠近前侧处活动连接有第一顶板,两个所述第二顶板和第一顶板顶部靠近前侧处均活动连接有第二L形杆,所述第二L形杆的前侧设有竖板,所述竖板的前侧开设有盲孔,且所述第二L形杆与盲孔内腔活动连接,所述竖板的顶端固定连接有弧形卡板,且所述弧形卡板的前侧活动连接有支撑杆,所述支撑杆的底端与第二顶板的顶端固定连接,所述第二顶板和第一顶板相邻之间设有第二螺纹套管和第二螺纹杆,且所述第二螺纹杆活动连接在第二螺纹套管内腔里,且所述第二螺纹套管的后侧通过第二轴承与第二顶板的前侧固定连接,所述第二螺纹杆的前侧与第一顶板的后侧固定连接,所述第二螺纹套管的两侧均设有第三伸缩杆,且所述第三伸缩杆的前后侧分别与第二顶板的前侧和第一顶板的后侧固定连接,所述手术台顶部左侧靠近后侧处和右侧靠近前侧处均开设有横槽,且两个所述横槽的内腔均活动连接有滑动杆,所述滑动杆的底端延伸至手术台的内腔,且两个所述滑动杆的顶端分别与第二顶板和第一顶板的底部固定连接。
优选的,所述调节机构包括有第一齿轮,所述第一齿轮设置在手术台内腔中心位置靠近上方处,所述第一齿轮的前侧与后侧均啮合有第一齿条板,所述第一齿条板的顶部与滑动杆的底端固定连接,且所述第一齿轮的底端固定连接有第二锥形齿轮,且所述第二锥形齿轮的底端左侧处啮合有第三锥形齿轮,且所述第三锥形齿轮的左侧固定连接有转轴,所述转轴的左侧固定连接有第四锥形齿轮,且所述第四锥形齿轮底端啮合有第一锥形齿轮,所述第一锥形齿轮的底端固定连接有活动杆,且所述活动杆的底端贯穿第一轴承的内腔且延伸至手术台的外侧,并固定连接有第二伸缩杆,所述第二伸缩杆的底端设有第一单槽轮,且所述第二伸缩杆的底端穿过第一单槽轮的内腔,且所述第二伸缩杆位于第一单槽轮的内腔,所述第一单槽轮的底端固定连接有第一转杆,且所述第一转杆的底端通过第三轴承与底板活动连接,所述第一单槽轮和第二伸缩杆底端均开设有通孔,且所述通孔的内腔活动连接有插销,所述第一单槽轮的右侧设有第二单槽轮,且所述第一单槽轮和第二单槽轮之间通过皮带传动连接,且所述第一转杆的右侧设有伺服电机,且所述伺服电机的底端与底板固定连接,所述第二单槽轮套设在伺服电机的输出轴上。
优选的,两个所述第一齿条板的底部均设有横板,两个所述横板相反的一侧均与手术台内腔的侧壁固定连接,且所述横板的顶部开设有第一滑槽,且所述横板与第一齿条板之间通过第一滑槽构成滑动连接。
优选的,所述升降机构包括有第二齿条板,所述第二齿条板的顶端固定连接在手术台底部中心位置处,所述第二齿条板右侧靠近上方处啮合有第二齿轮,且所述第二齿轮的后侧设有固定板,且所述固定板的顶端与手术台固定连接,所述第二齿轮的前侧设有棘轮,且所述棘轮和第二齿轮的内腔共同贯穿有横杆,且所述横杆的前后侧均延伸至棘轮和第二齿轮的外侧,所述横杆的后侧通过第四轴承与固定板活动连接,所述横杆的前侧固定连接有第六锥形齿轮,且所述第六锥形齿轮的底端啮合有第五锥形齿轮,且所述第五锥形齿轮的底端固定连接有竖杆,且所述竖杆的底端与伺服电机的输出轴固定连接。
优选的,所述棘轮的顶端贴合有限位片,且所述限位片的右侧活动连接有固定杆,且所述固定杆的顶端与手术台固定连接,所述限位片的后侧固定连接有连接杆,且所述连接杆顶端右侧处固定连接有第一螺纹杆,所述第一螺纹杆的外侧活动连接有第一螺纹套管,所述第一螺纹套管的顶端固定连接有第七锥形齿轮,且所述第七锥形齿轮顶端右侧处啮合有第八锥形齿轮,且所述第七锥形齿轮的顶端固定连接有第二转杆,所述第二转杆的顶端通过第五轴承与手术台活动连接,所述第八锥形齿轮的右侧固定连接有转动杆,且所述转动杆的右侧固定连接有摇柄,且所述转动杆的外侧上活动连接有第六轴承,且所述第六轴承的顶部固定连接有限位杆,且所述限位杆的顶端与手术台固定连接,所述限位片顶端贴合有弹簧片,且所述弹簧片底端左侧处固定连接有第一L形杆,且所述第一L形杆的顶端与手术台固定连接。
优选的,所述拿取机构包括有U形框,且所述U形框内腔左侧前侧处固定连接有弹簧,所述弹簧的右侧固定连接有连接板,且所述连接板顶部左侧处固定连接有第二连接块,所述第二连接块右侧处设有半圆块,且所述半圆块的底端与连接板固定连接,所述半圆块右侧设有第一连接块,且所述第一连接块的底端与连接板固定连接,所述第二连接块与半圆块之间活动连接有移动杆,且所述移动杆的右侧底端处与U形框活动连接。
优选的,所述U形框顶部靠近前侧处开设有第二滑槽,且所述第二滑槽的内腔活动连接有滑动块,且所述滑动块的后侧与连接板的前侧固定连接,且所述滑动块的顶部固定连接有移动块,且所述移动块的左侧与固定块的右侧相互贴合。
一种兽医用犬类手术固定装置的使用方法,包括以下步骤:
S1:通过在通孔内腔插进入插销,然后通过外接电源启动伺服电机,伺服电机的转速是适宜的转速,伺服电机会带动竖杆、第五锥形齿轮、第六锥形齿轮、棘轮、第二齿轮和横杆反向转动,从而通过第二齿条板带动手术台上升或者下降;
S2:竖杆反向转动的同时会带动反向第五锥形齿轮转动,第五锥形齿轮反向转动的同时会带动第六锥形齿轮反向转动,第六锥形齿轮反向转动的同时会通过横杆带动棘轮和第二齿轮反向转动,而限位片会一直在弹簧片的作用下与棘轮贴合着,会避免棘轮发生自转,第二齿轮反向转动的同时会带动第二齿条板向下移动,第二齿条板向下移动的同时会带动手术台向下移动,同时底板和第二伸缩杆也会随之一起下降;
S3:伺服电机启动的同时也会带动第二单槽轮转动,由于第一单槽轮和第二单槽轮之间通过皮带传动连接,所以第二单槽轮转动的同时会带动第一单槽轮转动,第一单槽轮转动的同时可以通过插销带动第二伸缩杆转动,第二伸缩杆转动的同时会通过活动杆带动第一锥形齿轮转动,第一锥形齿轮转动的同时会带动第四锥形齿轮转动,第四锥形齿轮转动的同时会带动转轴转动,转轴转动会带动第三锥形齿轮转动,第三锥形齿轮转动的同时会带动第二锥形齿轮转动,第二锥形齿轮转动的同时会带动第一齿轮转动,第一齿轮转动的同时会带动两个第一齿条板向相反的方向移动,从而通过滑动杆带动第二顶板和第一顶板向相反的方向移动,第二顶板和第一顶板向相反的方向移动时,也会通过第三伸缩杆拉动另外一个第二顶板和第一顶板在手术台表面一起移动,增加第二顶板与第一顶板之间的间距,适合体型较大的兽犬,当调整好高度和间距后,关闭电源,使伺服电机停止运行;
S4:然后再通过转动摇柄,摇柄转动的同时会通过转动杆带动第八锥形齿轮转动,第八锥形齿轮转动的同时会带动第七锥形齿轮转动,第七锥形齿轮转动的同时会带动第一螺纹套管转动,第一螺纹套管转动的同时会带动第一螺纹杆向下移动,第一螺纹套管向下移动的同时会带动连接杆向下移动,连接杆向下移动的同时会带动限位片向上移动,从而使限位片远离棘轮,然后通过外接电源启动伺服电机,使伺服电机正向转动,伺服电机正向转动的同时,会通过带动第二齿轮正向转动,从而带动第二齿条板向上移动,第二齿条板向上移动的同时会带动手术台向上移动,同时底板也会随之一起上升;
S5:然后第二伸缩杆会因为插销从而正向转动,从而带动第一齿轮正向转动,第一齿轮正向转动的同时会带动第一齿条板向相对里面的一侧移动,从而通过滑动杆带动第二顶板和第一顶板移动,缩短第一顶板和第二顶板之间的间距,适合体型较小的兽犬,当手术台的高度和间距调整好之后,关闭电源,使伺服电机停止运行,然后反向转动摇柄,使限位片复原,继续与棘轮贴合,避免其发生自转,如果不需要再调节手术台的高度时同时调节第二顶板和第一顶板的间距时,可以在启动伺服电机之前取走插销,这样第一单槽轮会发生空转,从而不会带动第二伸缩杆转动;
S6:当调整好之后,再根据兽犬大小调节两个第二顶板和两个第一顶板之间的间距,通过转动第二螺纹套管,第二螺纹套管转动的同时会带动第二螺纹杆向前移动,从而增大两个第二顶板和两个第一顶板之间的间距,反向转动第二螺纹套管时,会减小间距,调整好之后,通过移动第二L形杆,使第二L形杆远离盲孔的内腔,然后打开弧形卡板,再把兽犬放在手术台顶部,把兽犬的四肢均放在固定座上,然后合上弧形卡板,再移动第二L形杆,使第二L形杆插进盲孔内部,可以防止兽犬挣扎松脱;
S7:对兽犬固定结束后,通过按压按压块,半包存储框受到挤压的同时,固定块也会向里推动移动块,从而滑动块和会在第二滑槽的限位下向里移动,滑动块向里移动的同时也会带动连接板、第一连接块、半圆块和第二连接块向里移动,连接板、半圆块和第二连接块向里移动的同时,移动杆会远离半圆块和第二连接块之间,弹簧失去拉力会开始复原,从而拉动连接板、第二连接块、半圆块、连接板、第一连接块和滑动块向左移动,同时移动块也会推动固定块向左移动,固定块向左移动的同时半包存储框也会向左移动,可以取出半包存储框内腔里放置板上的手术器具,开始对兽犬进行手术;
S8:当手术结束后,移动第二L形杆,使第二L形杆远离盲孔的内腔,然后向上移动弧形卡板,从而解除对兽犬的固定,然后把兽犬移动到调养休息的床上去,再把手术中使用过的器具清洗干净后,重新放入放置板上面,然后再向右推按压块,会带动半包存储框向右移动,从而带动固定块推动移动块向右侧移动,移动的同时也会给弹簧一定的拉力,然后移动杆会卡在半圆块和第二连接块之间,这时候半包存储框就会位于半包框的内腔。
与现有技术相比,本发明的有益效果是:
1、本发明结构设计合理,便于调节手术台高度的同时还可以根据需求从而调节第二顶板与第一顶板之间的间距,便于兽犬手术的展开。
2、本发明通过升降机构,根据调节伺服电机正反转动的方向,便于对手术台的高度进行调节,伺服电机启动的时候会带动竖杆、第五锥形齿轮、第六锥形齿轮、第二齿轮、横杆和棘轮转动,然后通过第二齿条板从而带动手术台升降,第二齿条板升降的同时第一伸缩杆也会随之一起升降,使手术台在升降的过程中更加稳定。
3、本发明通过调节机构,通过在伺服电机启动前,插入插销,可以在调节手术台高度的同时会对第二顶板和第一顶板之间的间距进行调节,伺服电机正向转动时,会带动第一齿轮正向转动,从而缩短第二顶板与第一顶板之间的间距,伺服电机反向转动时,会带动第一齿轮反向转动,从而增大第二顶板与第一顶板之间的间距,便于适用于不同大小的兽犬。
4、本发明通过拿取机构,便于对手术器具进行拿取,通过向里推动一下按压块,半包存储框受到挤压的同时,固定块也会向里推动移动块,从而滑动块和会在第二滑槽的限位下向里移动,滑动块向里移动的同时也会带动连接板、第一连接块、半圆块和第二连接块向里移动,从而使移动杆会远离半圆块和第二连接块之间,同时移动块也会推动固定块向左移动,固定块向左移动的同时半包存储框也会向左移动,便于取出手术器具。
附图说明
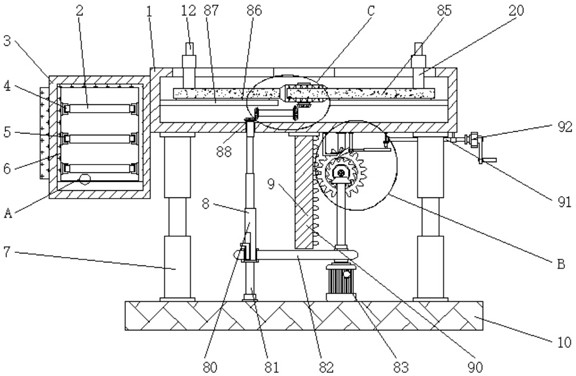
图1为本发明的正视剖面结构示意图。
图2为本发明的局部俯视结构示意图。
图3为本发明的第一齿轮局部俯视结构示意图。
图4为本发明的局部侧视结构示意图。
图5为本发明图1的A处放大结构示意图。
图6为本发明图1的B处放大结构示意图。
图7为本发明的U形框局部俯视剖面结构示意图。
图8为本发明图1的C处放大结构示意图。
图中标号:1、手术台;2、放置板;3、半包框;4、卡块;5、U形卡接板;6、半包存储框;7、第一伸缩杆;8、调节机构;80、第二伸缩杆;81、第一转杆;82、皮带;83、伺服电机;84、第一齿轮;85、第一齿条板;86、第一滑槽;87、横板;88、第一锥形齿轮;89、第二锥形齿轮;890、第三锥形齿轮;891、转轴;892、第四锥形齿轮;9、升降机构;90、第二齿条板;91、转动杆;92、摇柄;93、限位片;94、弹簧片;95、第一L形杆;96、横杆;97、第二齿轮;98、竖杆;99、第五锥形齿轮;990、第六锥形齿轮;991、棘轮;992、第一螺纹杆;993、第一螺纹套管;994、第七锥形齿轮;995、第八锥形齿轮;996、第二转杆;997、固定杆;998、固定板;10、底板;11、第三伸缩杆;12、第二L形杆;13、第二螺纹套管;14、第二螺纹杆;15、弧形卡板;16、支撑杆;17、竖板;18、固定块;19、拿取机构;190、移动块;191、U形框;192、弹簧;193、连接板;194、第一连接块;195、移动杆;196、第二滑槽;197、滑动块;198、第二连接块;199、半圆块;20、滑动杆;21、第一顶板;22、第二顶板。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-8,本发明提供一种技术方案:一种兽医用犬类手术固定装置,包括底板10,底板10的顶部固定连接有若干个第一伸缩杆7,且若干个第一伸缩杆7设置有四个,四个第一伸缩杆7以底板10顶部为中心呈左右前后对称设置,且四个第一伸缩杆7的顶端共同固定连接有手术台1,手术台1内腔底部靠近中心位置处开设与开口,且开口上活动连接有第一轴承,手术台1内腔中心位置靠近上方处设有调节机构8,调节机构8包括有第一齿轮84,第一齿轮84设置在手术台1内腔中心位置靠近上方处,第一齿轮84的前侧与后侧均啮合有第一齿条板85,两个第一齿条板85的底部均设有横板87,两个横板87相反的一侧均与手术台1内腔的侧壁固定连接,且横板87的顶部开设有第一滑槽86,且横板87与第一齿条板85之间通过第一滑槽86构成滑动连接,对第一齿条板85限位,防止移动时出现偏移,第一齿条板85的顶部与滑动杆20的底端固定连接,且第一齿轮84的底端固定连接有第二锥形齿轮89,且第二锥形齿轮89的底端左侧处啮合有第三锥形齿轮890,且第三锥形齿轮890的左侧固定连接有转轴891,转轴891的左侧固定连接有第四锥形齿轮892,且第四锥形齿轮892底端啮合有第一锥形齿轮88,第一锥形齿轮88的底端固定连接有活动杆,且活动杆的底端贯穿第一轴承的内腔且延伸至手术台1的外侧,并固定连接有第二伸缩杆80,第二伸缩杆80的底端设有第一单槽轮,且第二伸缩杆80的底端穿过第一单槽轮的内腔,且第二伸缩杆80位于第一单槽轮的内腔,第一单槽轮的底端固定连接有第一转杆81,且第一转杆81的底端通过第三轴承与底板10活动连接,第一单槽轮和第二伸缩杆80底端均开设有通孔,且通孔的内腔活动连接有插销,第一单槽轮的右侧设有第二单槽轮,且第一单槽轮和第二单槽轮之间通过皮带82传动连接,且第一转杆81的右侧设有伺服电机83,且伺服电机83的底端与底板10固定连接,第二单槽轮套设在伺服电机83的输出轴上,便于调节第一顶板21和第二顶板22之间的间距,且手术台1的左侧靠近上方处固定连接有半包框3,且半包框3的内腔活动连接有半包存储框6,半包存储框6的左侧固定连接有按压块,且按压块位于半包框3的外侧处,且半包存储框6的内腔设有若干个放置板2,且若干个放置板2的两侧均固定连接有卡块4,且卡块4运离放置板2的一侧活动连接有U形卡接板5,且U形卡接板5远离卡块4的一侧均与半包存储框6固定连接,半包存储框6底部靠近中心位置处固定连接有固定块18,且半包框3内腔的底部设有拿取机构19,拿取机构19包括有U形框191,U形框191顶部靠近前侧处开设有第二滑槽196,且第二滑槽196的内腔活动连接有滑动块197,且滑动块197的后侧与连接板193的前侧固定连接,且滑动块197的顶部固定连接有移动块190,且移动块190的左侧与固定块18的右侧相互贴合,对其限位,防止偏移,且U形框191内腔左侧前侧处固定连接有弹簧192,弹簧192的右侧固定连接有连接板193,且连接板193顶部左侧处固定连接有第二连接块198,第二连接块198右侧处设有半圆块199,且半圆块199的底端与连接板193固定连接,半圆块199右侧设有第一连接块194,且第一连接块194的底端与连接板193固定连接,第二连接块198与半圆块199之间活动连接有移动杆195,且移动杆195的右侧底端处与U形框191活动连接,便于拿取手术器具,手术台1底部中心位置处设有升降机构9,升降机构9包括有第二齿条板90,第二齿条板90的顶端固定连接在手术台1底部中心位置处,第二齿条板90右侧靠近上方处啮合有第二齿轮97,且第二齿轮97的后侧设有固定板998,且固定板998的顶端与手术台1固定连接,第二齿轮97的前侧设有棘轮991,棘轮991的顶端贴合有限位片93,且限位片93的右侧活动连接有固定杆997,且固定杆997的顶端与手术台1固定连接,限位片93的后侧固定连接有连接杆,且连接杆顶端右侧处固定连接有第一螺纹杆992,第一螺纹杆992的外侧活动连接有第一螺纹套管993,第一螺纹套管993的顶端固定连接有第七锥形齿轮994,且第七锥形齿轮994顶端右侧处啮合有第八锥形齿轮995,且第七锥形齿轮994的顶端固定连接有第二转杆996,第二转杆996的顶端通过第五轴承与手术台1活动连接,第八锥形齿轮995的右侧固定连接有转动杆91,且转动杆91的右侧固定连接有摇柄92,且转动杆91的外侧上活动连接有第六轴承,且第六轴承的顶部固定连接有限位杆,且限位杆的顶端与手术台1固定连接,限位片93顶端贴合有弹簧片94,且弹簧片94底端左侧处固定连接有第一L形杆95,且第一L形杆95的顶端与手术台1固定连接,可以避免第二齿轮97出现自转的现象,且棘轮991和第二齿轮97的内腔共同贯穿有横杆96,且横杆96的前后侧均延伸至棘轮991和第二齿轮97的外侧,横杆96的后侧通过第四轴承与固定板998活动连接,横杆96的前侧固定连接有第六锥形齿轮990,且第六锥形齿轮990的底端啮合有第五锥形齿轮99,且第五锥形齿轮99的底端固定连接有竖杆98,且竖杆98的底端与伺服电机83的输出轴固定连接,便于调节手术台1的高度,手术台1顶部左右两侧靠近后侧处均活动连接有第二顶板22,且手术台1顶部左右两侧靠近前侧处活动连接有第一顶板21,两个第二顶板22和第一顶板21顶部靠近前侧处均活动连接有第二L形杆12,第二L形杆12的前侧设有竖板17,竖板17的前侧开设有盲孔,且第二L形杆12与盲孔内腔活动连接,竖板17的顶端固定连接有弧形卡板15,且弧形卡板15的前侧活动连接有支撑杆16,支撑杆16的底端与第二顶板22的顶端固定连接,第二顶板22和第一顶板21相邻之间设有第二螺纹套管13和第二螺纹杆14,且第二螺纹杆14活动连接在第二螺纹套管13内腔里,且第二螺纹套管13的后侧通过第二轴承与第二顶板22的前侧固定连接,第二螺纹杆14的前侧与第一顶板21的后侧固定连接,第二螺纹套管13的两侧均设有第三伸缩杆11,且第三伸缩杆11的前后侧分别与第二顶板22的前侧和第一顶板21的后侧固定连接,手术台1顶部左侧靠近后侧处和右侧靠近前侧处均开设有横槽,且两个横槽的内腔均活动连接有滑动杆20,滑动杆20的底端延伸至手术台1的内腔,且两个滑动杆20的顶端分别与第二顶板22和第一顶板21的底部固定连接。
一种兽医用犬类手术固定装置的使用方法,包括以下步骤:
S1:通过在通孔内腔插进入插销,然后通过外接电源启动伺服电机83,伺服电机83的转速是适宜的转速,伺服电机83会带动竖杆98、第五锥形齿轮99、第六锥形齿轮990、棘轮991、第二齿轮97和横杆96反向转动,从而通过第二齿条板90带动手术台1上升或者下降;
S2:竖杆98反向转动的同时会带动反向第五锥形齿轮99转动,第五锥形齿轮99反向转动的同时会带动第六锥形齿轮990反向转动,第六锥形齿轮990反向转动的同时会通过横杆96带动棘轮991和第二齿轮97反向转动,而限位片93会一直在弹簧片94的作用下与棘轮991贴合着,会避免棘轮991发生自转,第二齿轮97反向转动的同时会带动第二齿条板90向下移动,第二齿条板90向下移动的同时会带动手术台1向下移动,同时底板10和第二伸缩杆80也会随之一起下降;
S3:伺服电机83启动的同时也会带动第二单槽轮转动,由于第一单槽轮和第二单槽轮之间通过皮带82传动连接,所以第二单槽轮转动的同时会带动第一单槽轮转动,第一单槽轮转动的同时可以通过插销带动第二伸缩杆80转动,第二伸缩杆80转动的同时会通过活动杆带动第一锥形齿轮88转动,第一锥形齿轮88转动的同时会带动第四锥形齿轮892转动,第四锥形齿轮892转动的同时会带动转轴891转动,转轴891转动会带动第三锥形齿轮890转动,第三锥形齿轮890转动的同时会带动第二锥形齿轮89转动,第二锥形齿轮89转动的同时会带动第一齿轮84转动,第一齿轮84转动的同时会带动两个第一齿条板85向相反的方向移动,从而通过滑动杆20带动第二顶板22和第一顶板21向相反的方向移动,第二顶板22和第一顶板21向相反的方向移动时,也会通过第三伸缩杆11拉动另外一个第二顶板22和第一顶板21在手术台1表面一起移动,增加第二顶板22与第一顶板21之间的间距,适合体型较大的兽犬,当调整好高度和间距后,关闭电源,使伺服电机83停止运行;
S4:然后再通过转动摇柄92,摇柄92转动的同时会通过转动杆91带动第八锥形齿轮995转动,第八锥形齿轮995转动的同时会带动第七锥形齿轮994转动,第七锥形齿轮994转动的同时会带动第一螺纹套管993转动,第一螺纹套管993转动的同时会带动第一螺纹杆992向下移动,第一螺纹套管993向下移动的同时会带动连接杆向下移动,连接杆向下移动的同时会带动限位片93向上移动,从而使限位片93远离棘轮991,然后通过外接电源启动伺服电机83,使伺服电机83正向转动,伺服电机83正向转动的同时,会通过带动第二齿轮97正向转动,从而带动第二齿条板90向上移动,第二齿条板90向上移动的同时会带动手术台1向上移动,同时底板10也会随之一起上升;
S5:然后第二伸缩杆80会因为插销从而正向转动,从而带动第一齿轮84正向转动,第一齿轮84正向转动的同时会带动第一齿条板85向相对里面的一侧移动,从而通过滑动杆20带动第二顶板22和第一顶板21移动,缩短第一顶板21和第二顶板22之间的间距,适合体型较小的兽犬,当手术台1的高度和间距调整好之后,关闭电源,使伺服电机83停止运行,然后反向转动摇柄92,使限位片93复原,继续与棘轮991贴合,避免其发生自转,如果不需要再调节手术台1的高度时同时调节第二顶板22和第一顶板21的间距时,可以在启动伺服电机83之前取走插销,这样第一单槽轮会发生空转,从而不会带动第二伸缩杆80转动;
S6:当调整好之后,再根据兽犬大小调节两个第二顶板22和两个第一顶板21之间的间距,通过转动第二螺纹套管13,第二螺纹套管13转动的同时会带动第二螺纹杆14向前移动,从而增大两个第二顶板22和两个第一顶板21之间的间距,反向转动第二螺纹套管13时,会减小间距,调整好之后,通过移动第二L形杆12,使第二L形杆12远离盲孔的内腔,然后打开弧形卡板15,再把兽犬放在手术台1顶部,把兽犬的四肢均放在固定座上,然后合上弧形卡板15,再移动第二L形杆12,使第二L形杆12插进盲孔内部,可以防止兽犬挣扎松脱;
S7:对兽犬固定结束后,通过按压按压块,半包存储框6受到挤压的同时,固定块18也会向里推动移动块190,从而滑动块197和会在第二滑槽196的限位下向里移动,滑动块197向里移动的同时也会带动连接板193、第一连接块194、半圆块199和第二连接块198向里移动,连接板193、半圆块199和第二连接块198向里移动的同时,移动杆195会远离半圆块199和第二连接块198之间,弹簧192失去拉力会开始复原,从而拉动连接板193、第二连接块198、半圆块199、连接板193、第一连接块194和滑动块197向左移动,同时移动块190也会推动固定块18向左移动,固定块18向左移动的同时半包存储框6也会向左移动,可以取出半包存储框6内腔里放置板2上的手术器具,开始对兽犬进行手术;
S8:当手术结束后,移动第二L形杆12,使第二L形杆12远离盲孔的内腔,然后向上移动弧形卡板15,从而解除对兽犬的固定,然后把兽犬移动到调养休息的床上去,再把手术中使用过的器具清洗干净后,重新放入放置板2上面,然后再向右推按压块,会带动半包存储框6向右移动,从而带动固定块18推动移动块190向右侧移动,移动的同时也会给弹簧192一定的拉力,然后移动杆195会卡在半圆块199和第二连接块198之间,这时候半包存储框6就会位于半包框3的内腔。
工作原理:首先,需要根据兽医的身高和兽犬的大小来调整手术台1的高度和第二顶板22和第一顶板21之间的间距,当手术台1和第一顶板21、第二顶板22之间的距离都需要调整时,把插销插入通孔里,然后通过外接电源启动伺服电机83,伺服电机83的转速是适宜的转速,伺服电机83会带动竖杆98转动,竖杆98反向转动的同时会带动反向第五锥形齿轮99转动,第五锥形齿轮99反向转动的同时会带动第六锥形齿轮990反向转动,第六锥形齿轮990反向转动的同时会通过横杆96带动棘轮991和第二齿轮97反向转动,而限位片93会一直在弹簧片94的作用下与棘轮991贴合着,会避免棘轮991发生自转,第二齿轮97反向转动的同时会带动第二齿条板90向下移动,第二齿条板90向下移动的同时会带动手术台1向下移动,同时底板10和第二伸缩杆80也会随之一起下降,伺服电机83启动的同时也会带动第二单槽轮转动,由于第一单槽轮和第二单槽轮之间通过皮带82传动连接,所以第二单槽轮转动的同时会带动第一单槽轮转动,第一单槽轮转动的同时可以通过插销带动第二伸缩杆80转动,第二伸缩杆80转动的同时会通过活动杆带动第一锥形齿轮88转动,第一锥形齿轮88转动的同时会带动第四锥形齿轮892转动,第四锥形齿轮892转动的同时会带动转轴891转动,转轴891转动会带动第三锥形齿轮890转动,第三锥形齿轮890转动的同时会带动第二锥形齿轮89转动,第二锥形齿轮89转动的同时会带动第一齿轮84转动,第一齿轮84转动的同时会带动两个第一齿条板85向相反的方向移动,从而通过滑动杆20带动第二顶板22和第一顶板21向相反的方向移动,第二顶板22和第一顶板21向相反的方向移动时,也会通过第三伸缩杆11拉动另外一个第二顶板22和第一顶板21在手术台1表面一起移动,增加第二顶板22与第一顶板21之间的间距,适合体型较大的兽犬,当调整好高度和间距后,关闭电源,使伺服电机83停止运行,然后再通过转动摇柄92,摇柄92转动的同时会通过转动杆91带动第八锥形齿轮995转动,第八锥形齿轮995转动的同时会带动第七锥形齿轮994转动,第七锥形齿轮994转动的同时会带动第一螺纹套管993转动,第一螺纹套管993转动的同时会带动第一螺纹杆992向下移动,第一螺纹套管993向下移动的同时会带动连接杆向下移动,连接杆向下移动的同时会带动限位片93向上移动,从而使限位片93远离棘轮991,然后通过外接电源启动伺服电机83,使伺服电机83正向转动,伺服电机83正向转动的同时,会通过带动第二齿轮97正向转动,从而带动第二齿条板90向上移动,第二齿条板90向上移动的同时会带动手术台1向上移动,同时底板10也会随之一起上升;然后第二伸缩杆80会因为插销从而正向转动,从而带动第一齿轮84正向转动,第一齿轮84正向转动的同时会带动第一齿条板85向相对里面的一侧移动,从而通过滑动杆20带动第二顶板22和第一顶板21移动,缩短第一顶板21和第二顶板22之间的间距,适合体型较小的兽犬,当手术台1的高度和间距调整好之后,关闭电源,使伺服电机83停止运行,然后反向转动摇柄92,使限位片93复原,继续与棘轮991贴合,避免其发生自转,如果不需要再调节手术台1的高度时同时调节第二顶板22和第一顶板21的间距时,可以在启动伺服电机83之前取走插销,这样第一单槽轮会发生空转,从而不会带动第二伸缩杆80转动,当调整好之后,再根据兽犬大小调节两个第二顶板22和两个第一顶板21之间的间距,通过转动第二螺纹套管13,第二螺纹套管13转动的同时会带动第二螺纹杆14向前移动,从而增大两个第二顶板22和两个第一顶板21之间的间距,反向转动第二螺纹套管13时,会减小间距,调整好之后,通过移动第二L形杆12,使第二L形杆12远离盲孔的内腔,然后打开弧形卡板15,再把兽犬放在手术台1顶部,把兽犬的四肢均放在固定座上,然后合上弧形卡板15,再移动第二L形杆12,使第二L形杆12插进盲孔内部,可以防止兽犬挣扎松脱,对兽犬固定结束后,通过按压按压块,半包存储框6受到挤压的同时,固定块18也会向里推动移动块190,从而滑动块197和会在第二滑槽196的限位下向里移动,滑动块197向里移动的同时也会带动连接板193、第一连接块194、半圆块199和第二连接块198向里移动,连接板193、半圆块199和第二连接块198向里移动的同时,移动杆195会远离半圆块199和第二连接块198之间,弹簧192失去拉力会开始复原,从而拉动连接板193、第二连接块198、半圆块199、连接板193、第一连接块194和滑动块197向左移动,同时移动块190也会推动固定块18向左移动,固定块18向左移动的同时半包存储框6也会向左移动,可以取出半包存储框6内腔里放置板2上的手术器具,开始对兽犬进行手术,当手术结束后,移动第二L形杆12,使第二L形杆12远离盲孔的内腔,然后向上移动弧形卡板15,从而解除对兽犬的固定,然后把兽犬移动到调养休息的床上去,再把手术中使用过的器具清洗干净后,重新放入放置板2上面,然后再向右推按压块,会带动半包存储框6向右移动,从而带动固定块18推动移动块190向右侧移动,移动的同时也会给弹簧192一定的拉力,然后移动杆195会卡在半圆块199和第二连接块198之间,这时候半包存储框6就会位于半包框3的内腔,便于下次使用。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种兽医用犬类手术固定装置及其使用方法
- 一种犬类绝育手术用固定装置