控制井下行为的系统和方法
文献发布时间:2023-06-19 11:21:00
相关申请的交叉引用
本申请要求2019年8月29日提交的美国专利申请No.62/724,436的优先权和权益,其全部内容通过引用明确地结合于此。
背景技术
在地下钻井中,使用钻头将井眼钻入地下地层中。钻头附接到回到地面的管道的部分。管道的附接部分连接到其他井下工具,统称为钻柱。钻柱的位于井眼底部附近的部分称为井底组件(BHA)。BHA通常包括钻头、传感器、电池、遥测装置以及位于钻头附近的其他装置。通过形成钻柱的管道从地面向钻头提供有时称为钻井泥浆的钻井液。钻井液的主要功能是冷却钻头,并使钻屑从井孔底部移出,并向上穿过钻柱与井孔壁之间的环空。通常,将传感器放置在BHA或钻头上以测量井下钻井参数或其他参数。传感器测量与井下环境中的钻头行为有关的井下参数。
发明内容
在一些实施例中,用于钻井眼的系统包括井底组件,该井底组件包括具有主体的切割工具。活动元件连接到主体并且相对于主体至少部分地在切割工具的纵向方向上是可移动的。致动器联接到活动元件并被配置为移动活动元件。至少一个传感器被配置为测量至少一个井下参数,并且处理器与至少一个传感器和致动器通信,以基于至少一个井下参数与目标参数之间的差值来移动活动元件。
在一些实施例中,一种用于钻井眼的系统包括具有纵向轴线的钻头,该钻头围绕该纵向轴线是可旋转的。活动元件位于钻头内或钻头上,并沿纵向轴线相对于钻头。该系统还包括致动器,其将力施加到活动元件上以使活动元件移动;以及至少一个传感器,其测量至少一个井下参数。该系统的处理器与至少一个传感器和致动器通信,以便在至少一个井下参数超过致动阈值时将活动元件移向伸出状态,并在当至少一个井下参数在停用阈值内时将活动元件移向缩回状态。
在一些实施例中,一种在井下环境中控制钻头的方法包括将钻头下钻到井下环境中,在该井下环境中,钻头具有相对于钻头的纵向轴线可移动的活动元件。该方法还包括在井下环境中向钻头施加扭矩,测量至少一个井下参数以及将至少一个井下参数与目标参数值进行比较。当至少一个井下参数超过目标参数值的阈值时,活动元件相对于钻头移动。移动活动元件可以向被钻头切割的地层或其他工件施加力。
提供本概述以介绍在详细描述中进一步描述的一些构思。该概述不旨在标识所要求保护的主题的关键或必要特征,也不旨在用于帮助限制所要求保护的主题的范围。本公开的实施例的附加特征和方面将在本文中阐述,并且部分地从描述中将是显而易见的,或者可以通过实践这些实施例而获知。
附图说明
为了描述可以获得本公开的以上引用的特征和其他特征的方式,将参照在附图中示出的其特定实施例来进行更具体的描述。为了更好地理解,在各个附图中,相同的元件已经用相同的附图标记表示。尽管一些附图可以是概念的示意性表示或放大表示,但是至少一些附图可以按比例绘制。理解附图描绘了一些示例实施例,将通过使用附图以附加的特征和细节来描述和解释实施例,其中:
图1是根据本公开的至少一个实施例的钻井系统的示意性侧视图;
图2是根据本公开的至少一个实施例的井下马达的截面图;
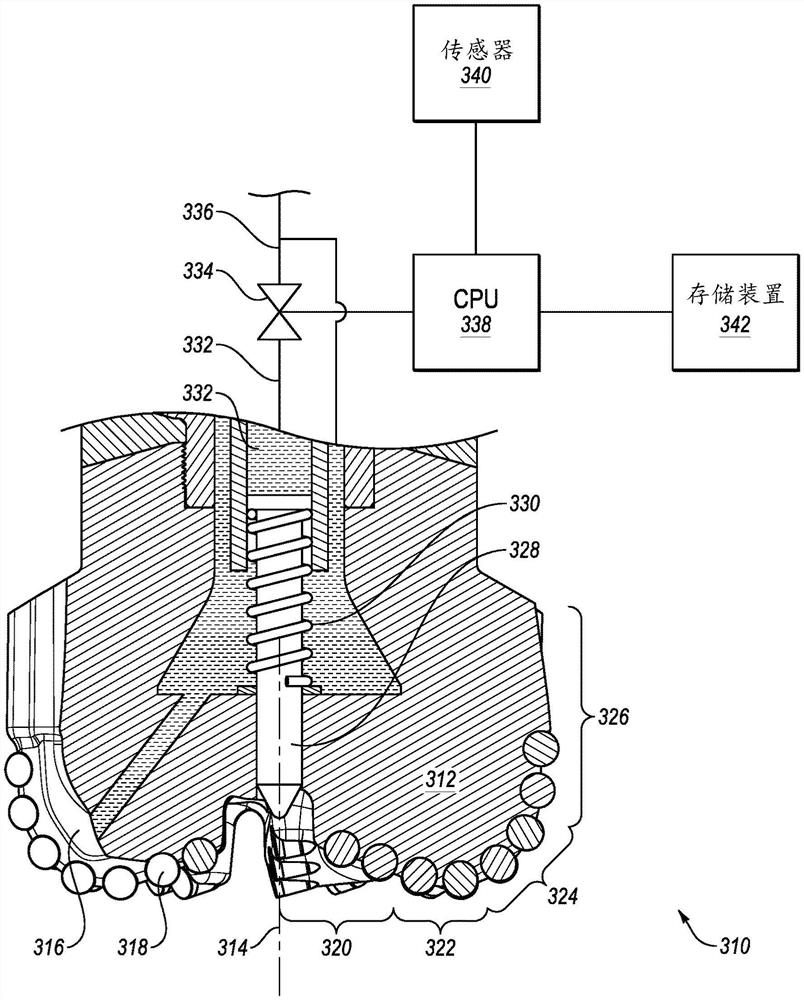
图3是根据本公开的至少一个实施例的钻头的截面图;
图4是根据本公开的至少一个实施例的另一钻头的截面图;
图5-1是根据本公开的至少一个实施例的具有第一切割深度的切割元件的侧视图;
图5-2是根据本公开的至少一个实施例的示出第二切割深度的图5-1的切割元件的侧视图;
图5-3是根据本公开的至少一个实施例的示出第三切割深度的图5-1的切割元件的侧视图;
图6是示出根据本公开的至少一个实施例的在井下环境中控制钻头的方法的流程图;
图7是示出根据本公开的至少一个实施例的在井下环境中控制钻头的另一种方法的流程图;
图8是示出根据本公开的至少一个实施例的在井下环境中控制钻头的又一方法的流程图;
图9-1是根据本公开的至少一个实施例的在井下环境中具有活动元件的钻头的侧视截面图;
图9-2是根据本公开的至少一个实施例的在井下环境中具有被致动的活动元件的图9的钻头的侧视截面图;
图10是示出根据本公开的至少一个实施例的钻头的旋转速度与活动元件的致动的关系的曲线图;和
图11是示出根据本公开的至少一个实施例的由活动元件施加的力相对于活动元件的位移的曲线图。
具体实施方式
本公开总体上涉及用于测量井下参数的装置、系统和方法。本公开的其他方面涉及移动活动元件以至少部分地基于井下参数来调节井下工具的行为。更具体地,本公开的方面涉及动态使用定位在井下切割工具中的至少一个活动元件以向地层施加力并改变井下切割工具的井下性能。
图1示出了用于对地层101进行钻井以形成井眼102的钻井系统100的一个示例。钻井系统100包括用于使向下延伸进入井眼102中的钻井工具组件104的钻机103。钻井工具组件104包括钻柱105和附接到钻柱105井下端的井底组件(“BHA”)106。诸如扩孔器、磨机或钻头110之类的切割工具可以附接到BHA 106,或包括为BHA 106的一部分。在所示的实施例中,钻头110包括在BHA 106的井下端。
钻柱105可以包括通过工具接头109端对端连接的钻杆108的多个接头。钻柱105通过中心孔传输钻井液,并将旋转动力从钻机103传输到BHA106。在一些实施例中,钻柱105可以进一步包括诸如短节、短接头等的附加部件。钻杆108提供了液压通道,通过该液压通道从地面泵送钻井液。钻井液通过钻头110中的选定尺寸的喷嘴、射流或其他孔口排出,以冷却钻头110及其上的切割结构,并在钻井时将钻屑从井眼102中提出。
BHA 106可以包括钻头110或其他部件。示例性的BHA 106可以包括附加的或其他的部件(例如,联接在钻柱105和钻头110之间)。其他BHA部件的示例包括钻钻铤、稳定器、随钻测量(“MWD”)工具、随钻测井(“LWD”)工具、井下马达、扩孔器、断面磨机、液压断开器、震击器、振动器或阻尼工具,其他部件或上述各项的组合。
通常,钻井系统100可以包括其他钻井部件和附件,例如专用阀(例如,凯利旋塞、防喷器和安全阀)。取决于钻井系统100中的部件的位置,可以将包括在钻井系统100中的其他部件视为钻井工具组件104、钻柱105或BHA 106的一部分。
钻井系统100可选地包括一个或多个旋转钻头110的井下马达111。除了地面旋转系统(例如钻机103中的顶部驱动器或旋转台)之外或代替地面旋转系统,可以包括井下马达111。井下马达111可包括涡轮钻、渐进位移马达(PDM)、由钻井液驱动的其他泥浆马达,电动马达或定位在地面的井下的其他马达。井下马达111能够向钻头110提供扭矩,以便旋转钻头以促进从地层101中去除材料。例如,PDM泥浆马达由通过钻柱105泵送至井下的钻井液的流体压力驱动,该钻井液通过PDM泥浆马达中的一系列腔被推动以旋转PDM泥浆马达的转子。转子的旋转将井下流动和钻井液的压力转换成使驱动轴旋转的扭矩。驱动轴联接到钻头110并使钻头旋转。涡轮钻通过使流体流过一系列涡轮并使涡轮中的转子旋转来进行操作。涡轮转子附接到轴上,该轴又使钻头相对于钻柱旋转。
BHA 106中的钻头110可以是适合于降解井下材料的任何类型的钻头。例如,钻头110可以是适合于钻入地层101的钻头。用于钻入地层的钻头的示例类型是固定切割器或牵引钻头、牙轮钻头或固定和牙轮钻头的混合体。在其他实施例中,钻头110可以是用于去除井下的金属、复合材料、弹性体、其他材料或其组合的磨机。例如,钻头110可以与造斜器一起用于磨削井眼102衬里的套管107。钻头110也可以是排屑磨,用于磨掉井眼102内的工具、塞子、水泥、其他材料,或其组合。使用磨机形成的切屑或其他碎屑可能会被提升到地面或可能掉入井下。
在一些实施例中,钻头110包括活动元件,该活动元件可相对于钻头在纵向上移动以向地层施加力并去除或改变由钻头110的切割结构承载的钻压(WOB)的比例。例如,假设WOB恒定,则轴向向下移动活动元件可能导致活动元件承受较高比例的重量,并导致重量比例减小的重量分配到刀片、牙轮、刀片或牙轮上的切割元件或其他切割结构。减小切割结构上的重量的绝对值或重量比例可以减少切割元件与地层的接合(例如,通过减小切割深度),从而允许切割元件(并因此使钻头110)以来自地层的较小阻力旋转。切割结构上的重量可以报告为或视为标称值(例如10,000磅力(44.5kN)),或者切割结构上的重量可以是与WOB成比例的相对数。例如,在一些示例中,在致动一个或多个活动元件之前,切割结构上的重量可以在WOB的80%至100%之间,并且在一个或多个活动元件的致动期间,切割结构上的重量可以在WOB的40%至90%之间。
减轻切割结构上的重量允许减小切割深度,并且钻头更一致地或自由地旋转。减小的旋转阻力可以减少或防止不良的井下动力学,例如粘滑或马达失速。活动元件可以通过液压、气压、磁力、机械力、一个或多个电动马达或通过另一种致动机构相对于钻头移动。活动元件响应触发事件而移动。例如,当一个或多个传感器提供关于一个或多个处理器将其与目标参数值或阈值进行比较的井下参数的信息时,可能发生触发事件。当井下参数偏离目标参数值,超过或低于致动阈值或以其他方式使用时,触发事件可能发生,并且处理器可以致动活动元件。
粘滑指的是当钻头110相对于地层101旋转时钻头110的不规则移动。钻头110的切割元件或其他部分与地层101接合,其从而阻止钻头110的旋转,减慢钻头110的旋转,这被称为“粘着”。由于扭矩可能仍会施加到井下系统,因此卡住可能会导致扭矩能量积聚。当钻头110在BHA 106、钻杆108或钻柱105的其它部分中产生并释放足够的扭转能量而“滑移”(其可包括完全脱离地层101或仅仅开始以更大的速度移除材料)时,至少一些累积的能量可被快速释放。产生的滑移行为可能会产生BHA 106和钻头110的很高的旋旋转速度率,从而可能损坏BHA 106或钻头110的部件并降低钻井系统100的钻速(ROP)或钻头110或BHA106的使用寿命。
当尽管有连续的流体流动,井下马达111的旋转速度下降并且马达停止旋转时,可能发生马达失速。马达失速可能是由于马达两端的压差低,导致马达产生的扭矩不足,并有可能导致损坏井下马达111。马达失速还可能是由于井下马达111上的压差高的结果。在某些情况下,马达失速也可能损坏井下马达111或在钻井液柱中产生压力波,这可能会损坏井下马达111或其他井下元件。对井下马达111的损坏可包括密封件破裂或对定子或转子的损坏,这使得马达效率低下或无法响应于流体流动而产生扭矩。
图2是具有定子213和转子215的井下马达211的实施例的侧视截面图。井下马达211表示PDM,其中流体217通过在纵向方向上移动一系列腔219而流过泥浆马达211。在渐进位移腔马达211中,转子215的外表面是单螺旋,而定子213的内表面是双螺旋。腔219相对于定子213的位移使转子215以偏心旋转的方式旋转以转动轴221。轴221可以驱动钻头(例如图1的钻头110)以在井下环境中去除材料。
在钻头经历粘滑行为时,转子215和定子213的相对旋旋转速度率可减小(在粘着期间)和增大(在滑动期间),从而导致流体压力分别相应地增大和减小。虽然速度和压力的突然增加和减少都可能损坏泥浆马达211,但是如果泥浆马达211失速并且流体压力只能在泥浆马达211的一侧建立,则定子213和转子215可能会遭受重大损坏。传感器240-1、240-2可以位于泥浆马达211的任一侧,以测量井上压力(例如,使用第一传感器240-1)、井下压力(例如,使用第二传感器240-2)或压差(例如,通过测量第一传感器240-1和第二传感器240-2承受的压力之间的差)。
图3是根据本公开的一些实施例的钻头310的实施例的侧视截面图。钻头310包括具有纵向旋转轴线314的钻头主体312,钻头310围绕该纵向旋转轴线314旋转。钻头主体312具有从其突出的一个或多个刀片316,并且多个切割元件318定位在刀片316中和/或固定在刀片316上。在一些实施例中,刀片316包括主刀片和副刀片。例如,主刀片和副刀片均从钻头310的径向外侧边缘朝向纵向旋转轴线314延伸,并且主刀片更靠近纵向旋转轴线314延伸。换句话说,主刀片在径向方向上较长。在相同或其他实施例中,切割元件318可定位一个或多个牙轮,或在一个或多个刀片316和一个或多个牙轮两者上。例如,除了或代替从钻头主体312突出的一个或多个刀片316,钻头主体312可具有定位在其上的至少一个牙轮,切割元件318附着到该牙轮。
切割元件318可以包括超硬材料。如本文所用,术语“超硬”应理解为是指本领域已知的具有约1,500HV(维氏硬度(kg/mm
钻头310的钻头轮廓包括各种区域,包括牙轮320、鼻部322,肩部324和保径部(gage)326区域。在图3中,示出了用于单个刀片316的区域,但是,当旋转到单个平面中时,钻头310的完整切割轮廓包括钻头310的每个切割元件318。切割元件318可定位在牙轮320、鼻部322、肩部324和保径部326区域中的任何一个或每个上,以从地层(例如,图1的地层101)去除材料和/或保护钻头主体312免受由于与地层或其他工件接触而产生的磨损。切割元件318与井下工件(例如,地层)接合以断裂、磨损、研磨、剪切或以其他方式机械地从地层中去除材料。尽管图3中示出的切割元件318包括剪切切割元件,但是可以使用其他切割元件几何形状来代替剪切切割元件或与剪切切割元件组合。例如,可以在本文所述的钻头轮廓的任何或每个区域中采用诸如圆锥形切割元件、脊形切割元件或子弹头切割元件之类的带尖顶或尖头的切割元件。
随着钻头310围绕旋转轴线314的每次旋转,从地层中去除的材料量根据一个或多个井下参数而变化。例如,井下参数包括诸如地层的硬度、地层流体压力,或地层的均匀性影响材料去除的体积和速率的地层特性。另外,井下参数包括BHA特性,其包括钻头310的旋旋转速度率,钻压(WOB)(即,由钻头310在钻头310的纵向方向上施加到地层的力的量)、切割元件318和/或刀片316的几何形状和状态、切割元件318在切割轮廓中的放置、钻井液流速(用于冲洗来自刀片316的切割屑)以及其他BHA特性都会影响材料去除的体积和速率。各种地层特性和BHA特性的相互作用和结合会影响材料去除的体积和速率。例如,取决于地层的硬度、暴露高度、WOB等,较重的一组切割元件(即,切割轮廓中的更多切割元件)可能会产生或多或少的材料去除。
接合地层的切割元件318具有切割深度(DOC),其与切割时延伸到地层中的切割元件318的数量有关。切割元件318延伸到地层中的数量越大,DOC越高。因此,DOC是钻头310每次旋转如何积极地从地层中去除材料的量度。DOC可能受切割元件的几何形状和材料影响。例如,圆锥形切割元件表现出与剪切切割元件不同的DOC。DOC可能受切割元件取向的影响。圆锥形切割元件将表现出不同的DOC,因为切割元件的顶点相对于井下工件的表面以不同的角度(例如倾角)取向。DOC也受地层材料的影响。例如,切割元件在具有不同硬度或孔隙率的地层中表现出不同的DOC。DOC可能会进一步受到切割结构重量的影响。因此,通过减小切割结构的重量,即使在钻头重量恒定的情况下,也可以减小DOC。例如,通过致动钻头310的活动元件328,可以增加活动元件328上的WOB的量,同时减小施加到切割元件318上的WOB的比例。
ROP涉及钻头310从地层中去除材料并延伸井眼的长度的速率。尽管更大的DOC可以对应于更大的ROP,但是DOC的增加也可以与钻头310上的更大的扭矩量相关联并且可以减慢钻头310的旋旋转速度率,从而导致ROP的减小。在某些情况下,DOC的突然增加(例如,由于地层的变化或切割结构上的WOB或重量的突然增加)可能会导致钻头310的扭矩突然变化或钻头310的旋转速度变化。在某些情况下,扭矩或旋旋转速度率的变化不利于钻头310或切割元件318的性能或使用寿命。例如,钻头上的DOC或扭矩的增加、钻头的旋旋转速度率的减小或其组合可能会产生粘滑行为或马达失速,或者是其结果。地层特性和/或BHA特性的变化可能会进一步产生振动、涡旋或其他不良影响。
在一些实施例中,根据本公开的钻头310用于减轻粘滑、马达失速或其他不期望的井下状况或行为。例如,钻头310具有活动元件328。活动元件328可选地定位在钻头主体312中,并且相对于钻头主体312可移动。而图3示出了活动元件328从钻头的表面延伸并与纵向旋转轴线314同轴,活动元件328可以被定位在钻头310中的其他位置和/或成其他取向。例如,活动元件328可以定位在刀片316中或在刀片316之间的排屑槽中。在其他示例中,活动元件328可以在与纵向旋转轴线314成角度的取向上移动。
活动元件328从钻头310至少部分突出以接触地层。活动元件328具有伸出状态和缩回状态,并且可选地,当处于伸出状态和缩回状态时,活动钻头328都从钻头310的表面突出,尽管程度不同。在其他实施例中,活动元件328在钻头主体312内凹进,使得当处于缩回状态时,活动元件328不接触地层。当被致动时,活动元件328被推向伸出状态。活动元件328可被致动到缩回状态与伸出状态之间的多个位置。当被致动时,活动元件328可以向地层施加力(这还包括增加比例的WOB),从而改变切割结构、DOC或两者上的重量。施加到地层的力可能会减少,停止或防止粘滑行为、振动、涡旋、马达失速以及其他不良影响。
在一些实施例中,活动元件328朝向或向钻头310的面或主体偏压。例如,偏压元件330,例如弹簧、可压缩流体、磁体或其他施加力到活动元件328的机构可以定位在钻头310中,以使活动元件328偏离具有地层和切割元件318的钻头310的井下端。在所示的实施例中,这包括在与纵向轴线314同轴或平行于纵向轴线314的井上纵向方向上偏压活动元件328。在其他示例中,偏压元件330可以定位在BHA中的其他位置(例如,在钻铤中),可以相对于切割工具的纵向轴线314以一定角度偏压活动元件328,或者具有其他位置或取向。活动元件328可以被选择性地致动或激活以相对于钻头主体312(例如,在井下纵向方向上)移动活动元件328。活动元件328的致动可导致活动元件328从钻头310的面、刀片或主体突出,或者如果已经超过所述钻铤310的面、刀片或主体,则增加活动元件328从钻头310突出的量。通过增加活动元件328突出的量,活动元件328向地层施加力(或增加的力)。致动器控制活动元件328的移动。
在一些实施例中,活动元件328通过来自液压流体332的液压相对于钻头310移动。活动元件328的致动器包括阀334,该阀至少部分地控制从流体导管336到活动元件328(或联接到活动元件328的驱动元件)的表面的液压流体332的液压。在一些实施例中,液压流体332是钻井液,并且流体导管336是来自地面钻井站的导管,该地面钻井站向钻头310和井下环境提供钻井液。例如,流体导管336可包括形成钻柱(例如,图1的钻柱105)的钻杆或连续油管。在其他实施例中,并且如关于图4更详细地描述的,液压流体是与钻井流体隔离的流体(例如,清洁流体)。
在一些实施例中,阀334是数字阀或开关阀,其允许液压流体332在打开状态下流动并且阻止液压流体332在关闭状态下流动。例如,阀334可以移动到打开状态并保持打开(或移动到关闭状态并保持关闭),直到活动元件328移动到预期位置。在其他示例中,阀334重复地在打开状态和关闭状态之间重复地移动,以多次连续地致动活动元件328,从而将活动元件移动到预期位置。在其他实施例中,阀334是比例阀,其允许阀被移动到打开状态和关闭状态之间的各种离散或比例状态中的任何一个。利用比例阀,产生使活动元件328移动的力的液压流体332的量可以改变(并且在打开状态下具有总流量和致动力的一定比例),从而允许活动元件328具有多个伸出状态。
活动元件328的移动可由中央处理单元(CPU)338或与阀334或其他致动器(例如液压泵、电动马达或其他用于移动活动元件328的装置)进行数据通信的其他处理器控制。在一些实施例中,CPU 338与一个或多个传感器340进行数据通信,该传感器340测量一个或多个井下参数并将有关井下参数的信息提供给CPU338。CPU338至少部分地基于从一个或多个传感器340接收的信息来控制活动元件328的移动和/或位置。
在一些实施例中,传感器340中的至少一个定位在钻头310的井上。例如,传感器340可以定位在钻头310的井上,以测量WOB。在其他实施例中,传感器340中的至少一个被定位在钻头310内。例如,传感器340可以被定位在钻头主体312中以测量钻头310的旋转速度。在又一实施例中,至少一个传感器340被定位在井下马达的井下。在另外的实施例中,传感器340中的至少一个定位在井下马达的井上。例如,一对传感器340可以定位在井下马达的任一纵向端(例如,在钻头的井上侧和井下侧)上,以测量井下马达的扭矩、井下马达两端的压差、井下马达的旋转速度,或其组合。
在一些实施例中,至少一个传感器340是地层传感器。地层传感器配置为测量一个或多个地层特性,包括地层硬度、地层均质性(在分层地层的情况下)、地层孔隙率、地层完整性、地层温度、地层流体含量、地层流体压力或地层的其他特性。在其他实施例中,至少一个传感器340是钻井系统传感器。钻井系统传感器配置为测量一个或多个钻井系统或BHA特性,包括旋转速度、扭矩、振动、线速度、温度、钻井液压力、液压液压力或钻井装置的其他性能。例如,传感器可以是力传感器、扭矩传感器、压力传感器、线速度传感器、旋转速度传感器或其他类型的传感器,以测量钻井系统的移动或施加到钻井系统的力。
CPU 338可以进一步包括其上存储有指令的硬件存储装置342,或者与之进行数据通信。指令可以是软件或固件代码的形式,其在由CPU 338执行时使CPU 338和/或钻头310伸出或缩回活动元件328,或执行本文所述的任何方法或方法的一部分。硬件存储装置342可以包括基于台板的存储装置、固态存储装置、RAM或其他持久性、非传输类型或长期存储装置。
现在参考图4,在其他实施例中,液压流体432是清洁的液压流体(例如,不是从地面提供的或其通过钻头的喷嘴离开的钻井流体)。液压流体432可以专用于活动元件428的加压。例如,流体导管436对储器435加压,并且阀434控制从流体导管436到储器435的流量。在一些实施例中,阀434由CPU 438控制,该CPU 438与一个或多个传感器440和硬件存储装置442通信。当阀434关闭时,该阀限制并潜在地阻止来自流体导管436的流体增加在储器435上的压力。当阀434打开时,阀434允许来自流体导管436的流体压力对储器435和液压流体432加压,进而向活动元件428施加力。
在一些实施例中,泵437从储器435朝向活动元件428向液压流体432提供加压或附加加压,以使活动元件428相对于钻头主体412移动。例如,泵437可以是单作用活塞泵、双作用活塞泵、旋转泵、渐进排量腔泵或其他流体泵。在其他实施例中,活动元件428可通过一个或多个电动马达(例如伺服马达、步进马达、线性致动器、蜗轮、电磁体或其他电子控制装置)移动,以移动活动元件428。
图3和4的传感器340、440可以以足以允许活动元件328、428响应井下参数的变化的采样率来测量或采样井下参数。在一些实施例中,活动元件328、428实时或接近实时地响应井下参数的变化。在一些实施例中,采样率在具有下限值、上限值或下限值和上限值的范围内,包括10Hz、20Hz、50Hz、100Hz、250Hz、500Hz、1000Hz、5000Hz、10000Hz中的任何一个;或者其间的任何值。例如,采样率可以大于10Hz。在其他示例中,采样率小于10,000Hz。在其他示例中,采样率在10Hz和10,000Hz之间。在其他示例中,采样率在20Hz至5,000Hz之间、50Hz至1,000Hz之间或大约100Hz。在其他示例中,采样率小于10Hz或大于10,000Hz。
图5-1至5-3示出了DOC如何随着切割元件的几何形状和WOB(或切割结构的重量)而变化。图5-1是切割元件支撑件516(例如,刀片或牙轮)的侧视截面图,其中该第一切割元件518-1与具有第一DOC 523-1的地层501接合。在存在多个切割元件的情况下,切割结构上的总重量可以分配给一些或每个单独的切割元件。施加到切割元件516上的切割结构上的总重量的部分被示为切割元件525-1上的第一重量。第一切割元件518-1是剪切切割元件,并且切割元件支撑件516相对于地层501在切割方向527上移动(例如,旋转使得切割元件518-1的切割面旋转地引导切割元件518-1的后端)。第一切割元件518-1相对于切割方向527以后倾角529(图5-1中的负后倾角)取向。增加倾角529会减小切割元件518-1的积极性,并且在在相同的加载条件下,还可以减少DOC。例如,后倾角529为-10°的切割元件518-1具有与垂直于地层501成10°的面531,并且其在相同的载荷条件下比倾角529为-5°使得该面531与垂直于地层501成5°的切割元件518-1具有更小的积极性(agressive)和更低的DOC。因此,在相同的载荷条件下,具有较低负后倾角529的切割元件比具有较高负后倾角529的切割元件从地层501移除更多的材料。
与图5-1相关的讨论假定面531是平面的;然而,面531可以具有其他形状。例如,切割元件531的面在与结构501接合的切割尖端处可以是凹入的。在切割元件531在切割尖端处是凹入的情况下,切割元件可以具有有效的后倾角,该后倾角是基于面的几何形状,而不是切割元件的轴,测得的。尽管切割元件(如通过轴线测量的)具有负的后倾角,但是这种切割元件可以具有正的有效后倾角。正的有效后倾角可在相同的载荷条件下提供更大的积极性和更大的切割深度。
图5-2示出了切割元件支撑件516的横截面,其中第一重量位于切割元件525-1上。切割元件支撑件516支撑第二切割元件518-2,该第二切割元件518-2具有与图5-1所示的第一切割元件518-1不同的切割元件几何形状。例如,第二切割元件518-2代表圆锥形、脊形或其他尖顶的切割元件。与图5-1的剪切第一切割元件518-1相比,由于更大的点载荷,带尖顶的第二切割元件518-2可以以切割元件525-1上相同的重量向地层501施加更大的压力。增加的压力可导致相对于第一DOC 523-1的增加的第二DOC 523-2。
图5-3是第一切割元件518-1的侧面截面图,在切割元件525-2上具有第二重量。切割元件525-2上的第二重量小于切割元件525-1上的第一重量。当第一切割元件518-1和地层501相同时,减小的切割元件525-2上的第二重量可导致第三DOC 523-3小于图5-1中所示的第一DOC 523-1。尽管图5-1至5-3示出了通过改变切割元件的几何形状和切割元件上的重量(或整个切割结构上的重量)来改变DOC,但DOC可能会受到与BHA或钻头相关的其他因素的影响,或由钻头操作员控制。示例包括WOB、切割元件后倾角和侧倾角、切割元件密度、切割元件类型、刀片密度、其他钻井系统特性、地层组成变化、孔隙率、流体压力、温度、分层或其他地层或环境条件。
图6是示出了在井下环境中控制井下切割工具的示例方法644的流程图。在所示的实施例中,方法644包括在646处将切割工具下钻到井下环境中。在646处将切割工具下钻到井下环境中还可以包括将BHA、钻柱或一个或多个井下工具下钻到井下环境中。井下环境可以包括直的、偏斜的或定向的井眼,或直的、偏斜的或取向的部分。插入井眼中的切割工具可以包括相对于切割工具主体可移动的活动元件。在一些实施例中,活动元件至少在纵向方向上是可移动的,结果,活动元件从切割工具的面或主体突出的量选择性地变化。方法644包括在648处旋转切割工具。在一些实施例中,钻头通过顶部驱动器或旋转台旋转,并且用于旋转切割工具的扭矩通过钻柱从顶部驱动器传递至切割工具。在其他实施例中,切割工具通过由钻井液驱动的井下马达(例如,泥浆马达或涡轮钻)旋转,并定位在井下环境内的钻柱中。在648处旋转切割工具还可以包括向切割工具施加重量。例如,钻柱和BHA可能会有助于重量施加在切割工具上,或者井下牵引器或其他部件可能会在切割工具上施加重量。
图6的方法644还包括在649处控制切割元件的活动元件的移动。在图6中,通过至少部分地在650处测量至少一个井下参数,在652处将至少一个井下参数与目标参数值进行比较以及在654处相对于切割工具主体移动活动元件,来实现控制活动元件649的移动。在一些实施例中,测量至少一个井下参数包括使用至少一个传感器(例如,图2的传感器240-1、240-2、240-3或图3和4的340、440)与处理器(例如,图3和4的CPU 338或438)通信。井下参数可以是切割工具周围的周围地层的特性。例如,井下参数可以包括地层特性,包括地层硬度、地层均质性(在分层地层的情况下)、地层孔隙率、地层完整性、地层温度、地层流体含量、地层流体压力或地层的其他特性。
在649处控制活动元件的移动可选地包括在650处周期性地、连续地或迭代地重复在650处测量至少一个井下参数的至少一部分,在652处将至少一个井下参数与目标参数值进行比较,或在654处相对于切割工具主体移动活动元件。例如,在654处相对于钻头主体移动活动元件之后或同时,系统可以再次测量至少一个井下参数,比较测得的至少一个井下参数与目标参数值,然后不使切割元件相对于工具主体移动(例如,当所测得的参数与目标参数之间没有足够的差值时)。在其他示例中,在652处将至少一个井下参数与目标参数值进行比较之后,当确定活动元件不应该相对于切割工具主体移动时,系统可以再次测量至少一个井下参数。
在650处使用至少一个传感器测量的井下参数也可以或替代地是切割工具、BHA或钻柱的特性。例如,井下参数可以是切割工具或BHA、WOB、ROP的旋转速度、切割工具的横向振动、切割工具的轴向振动、切割工具或BHA的其他加速度计读数、切割工具上的扭矩、切割工具上方的扭矩、井下马达转子或轴上的扭矩、一个或多个切割元件的DOC、切割工具或井下马达两端的钻井液的压降或切割工具、BHA或钻柱的其他特性。在其他示例中,井下参数包括相对值,例如地面驱动系统(例如,顶部驱动器或旋转台)与切割工具/BHA之间测得的旋转速度差、切割工具与井下马达驱动轴之间的旋转速度差或切割工具与地面驱动系统之间的扭矩差。
在一些实施例中,在652处将至少一个井下参数与目标参数值进行比较包括计算至少一个井下参数与目标参数之间的差。例如,处理器从传感器接收测量的井下参数,并将测量的井下参数的值与目标参数进行比较。目标参数可选地是动态计算的目标值,并且在652处将井下参数与目标参数进行比较可以包括计算两者之间的差。在一些示例中,目标参数是恒定值。例如,钻头操作员可以设置钻头的目标旋转速度(例如,每分钟120转(RPM)),并且与目标结果的一些或全部偏差可能导致在654处的活动元件的移动。
在其他示例中,目标参数是动态计算的。示例的动态计算的目标参数是切割工具的旋转速度的滚动平均值。例如,目标参数可以是所测量的切割工具的旋转速度的30秒滚动平均值。与30秒滚动平均值(瞬时或其他滚动平均值)的突然偏离会导致在654处活动元件的移动。
在一些示例中,切割工具相对于扭矩源(例如,顶部驱动器、旋转台、泥浆马达或涡轮钻)的速率的相对旋旋转速度率可以指示粘滑行为的存在。目标参数可以是扭矩源的旋旋转速度率,而测得的井下参数可以是切割工具的旋旋转速度率。如果测得的井下参数不超过目标参数值,则方法644可以包括返回到测量井下参数。相比之下,举例来说,如果钻井系统检测到参数超过目标参数值或与目标参数有显著差值(例如,在652处,顶部驱动器或泥浆马达和切割工具的旋旋转速度率之间的至少5%、10%或15%的偏差),则可以在654处移动活动元件。在另一个示例中,如果在652处检测到切割工具的旋旋转速度率与扭矩源的旋旋转速度率有10%的偏差,则该系统可以触发阀(例如,图3和图4的阀334、434)的成比例的打开或关闭,以改变向活动元件的液压并且使活动元件移动相应的量。通过移动活动元件,活动元件可以减小切割结构上的DOC和/或WOB的一部分,并允许钻头提高速度。例如,减小DOC可减少钻头的阻力,并使钻头更有效地传递扭矩和恢复速度。速度的增加可以消散钻柱中的任何扭转能量,从而避免了在粘滑行为的打滑部分期间经历的钻头旋旋转速度率的突然阶跃变化。
在一些实施例中,可以在654处使用不同的测得的井下参数和相关联的目标参数的组合来控制活动元件。例如,与第一目标参数的测得的偏差(例如,井下马达两端的10%的压降)与测得的与第二目标参数的偏差(例如,钻头旋转速度的10%差值)相结合,导致与测得的与第一目标参数的10%偏差或测得的与第二目标参数的10%偏差相比,该活动元件的更积极性的致动。
在654处,活动元件相对于切割工具主体的移动可包括将活动元件远离切割工具主体移动或移动到切割工具主体中。活动元件远离切割工具主体并朝向地层的移动可以施加力或增加由活动元件施加到地层的力。活动元件施加的力或增加的施加力可能会增加活动元件支撑的WOB的部分,并减少整体上施加到其他切割结构的WOB的部分,以及施加到单独切割结构的部分。活动元件进入切割工具主体并远离地层的移动可以去除施加的力或减小施加到地层的力。活动元件施加的力的减少可以减少活动元件支撑的WOB的部分,并增加WOB施加到切割元件和切割结构的部分。
在一些实施例中,在654处相对于钻头主体移动活动元件包括在至少一个打开状态和关闭状态之间移动阀以改变施加到活动元件的液压。例如,打开阀(或进一步打开阀)以允许液压流体的流动和/或增加液压流体的液压,以使活动元件远离切割工具主体并朝向地层移动。在其他示例中,关闭阀会限制并潜在地阻止液压流体的流动,或降低用于将活动元件移入或移向切割工具主体并远离地层的液压流体的液压。
在其他实施例中,在654处相对于切割工具主体移动活动元件包括致动流体泵以改变施加到活动元件的液压。例如,泵可以是单作用活塞泵、双作用活塞泵、旋转泵、渐进排量腔泵或其他流体泵。在其他实施例中,活动元件可通过一个或多个电动马达移动,例如伺服马达、步进马达、线性致动器、蜗轮、电磁体或其他电子控制装置,以移动活动构件。在其他实施例中,将活动元件相对于移动。
图7示出了在井下环境中控制切割工具的方法744的另一实施例。尽管仅在钻头的背景下描述了方法744,但是该方法同样适用于其他类型的切割工具。
在所示的实施例中,方法744包括在746处将钻头下钻到井下环境中,并且在748处使钻头相对于地层旋转。可以将钻头下钻到井下环境中并且相对于地层旋转钻头可以是与图6的相似元件646和648相似或相同。
图7的方法744还包括在749处控制钻头的活动元件的移动。控制活动元件的移动包括在750处测量至少一个井下参数,在751处计算测得的井下参数与目标参数值之间的差值,在753处将该差值与致动阈值进行比较,并在754处相对于钻头主体移动活动元件。在一些实施例中,测量至少一个井下参数包括使用至少一个传感器(例如图2-4的传感器240-1、240-2、240-3、340和440与处理器(例如图3和4的CPU 338或438)通信。井下参数可以是钻头周围的周围地层的特性,也可以是钻头或钻柱的特性,如关于图6所述的。
在一些实施例中,在751处计算测得的井下参数与目标参数值之间的差值,并在753处将该差值与致动阈值进行比较,用来确定在754处是否以及何时移动活动元件。对于方法744,可用于打开阀和/或致动泵以向活动元件施加液压,从而在测得的井下参数超过或低于阈值时,或者当测量的井下参数和目标参数之间的差值超过阈值时,移动活动元件。相比之下,当所测量的参数在期望范围内时或当该差值不超过阈值时,可能没有响应。例如,如果致动阈值与目标参数有10%的偏差,则当计算出测得的井下参数与目标参数值之间的差值大于目标参数值的10%时,将致动活动元件。
在一些实施例中,目标参数值是致动阈值所基于的恒定或固定值。例如,目标参数值可以是钻头旋转速度(例如200RPM),而致动阈值是相对于旋转速度的百分比偏差(例如目标参数的10%或20RPM),这可以创建目标范围(例如180至220RPM)。因此,测得的钻头旋转速度超出期望范围(例如,大于220RPM或小于180RPM)会导致测得的井下参数与目标参数值之间的差值大于10%的驱动阈值。在其他示例中,目标参数值可以是钻头上的扭矩。在这样的示例中,在致动阈值为15%的情况下,直接测量或间接计算的、比目标钻头扭矩高15%或低于目标钻头扭矩15%的钻头扭矩导致活动元件的致动。钻头的目标扭矩参数值可以在具有下限值、上限值或下限值和上限值的范围内,包括以下中在任何一个:5.0千磅-英尺(klbf-ft)(6.8千牛顿-米(kN-m))、7.5klbf-ft(10.2kN-m)、10.0klbf-ft(13.6kN-m)、12.5klbf-ft(16.9kN-m)、15.0klbf-ft(20.3kN-m)、17.5klbf-ft(23.7kN-m)、20.0klbf-ft(27.1kN-m)、22.5klbf-ft(30.5kN-m)、25.0klbf-ft(33.9kN-m)、30.0klbf-ft(40.7kN-m)、35.0klbf-ft(47.5kN-m)、40.0klbf-ft(54.2kN-m)或它们之间的任何值。例如,钻头上的目标扭矩参数值可能大于5.0klbf-ft(6.8kN-m)。在其他示例中,钻头上的目标扭矩参数值可以小于25.0klbf-ft(33.9kN-m)或小于40.0klbf-ft(54.2kN-m)。在其他示例中,钻头上的目标扭矩参数值可以在5.0klbf-ft(6.8kN-m)和25.0klbf-ft(kN-m)之间,或5.0klbf-ft(6.8kN-m)和40.0klbf-ft(54.2kN-m)。在其他示例中,钻头上的目标扭矩参数值可以小于5.0klbf-ft(6.8kN-m)或大于40.0klbf-ft(54.2kN-m)。
在其他实施例中,目标参数值被确定为井下参数的历史值。例如,目标参数值可以是致动阈值所基于的井下参数的累积平均值、中值或滚动平均值。在至少一个示例中,目标参数值可以是15秒、30秒、60秒、90秒或120秒(或其他持续时间)的滚动平均值。作为示例,目标参数值可以是井下马达两端的压差,尽管可以使用本文讨论的任何合适的参数值。如果致动阈值与目标参数值有15%的偏差,则当测得的井下马达两端的压差与井下马达两端的压差的滚动平均值偏离大于滚动平均值的15%的量时,活动元件可以相对于钻头主体移动。在其他示例中,目标参数值可以是钻头旋转速度的20秒(或其他持续时间)滚动平均值,其中驱动阈值是滚动平均值的5%、10%、20%或另一百分比。在一些示例中,井下参数的测量值是瞬时值;然而,在其他示例中,测量值是持续时间的平均值(例如,滚动平均值),其小于目标参数滚动平均值。因此,在本公开内,井下参数的测量值不仅包括原始数据或测量值,而且包括从原始数据计算或得出的值(例如,平均值、相对于另一值的差等)。作为说明,如果目标参数是20秒滚动平均值,则可以使用为是井下参数的瞬时测量的3秒或5秒滚动平均值的测量的井下参数来计算测量的井下参数和目标参数值之间的差值。在至少一个示例中,当钻头旋转速度的较短滚动平均值偏离钻头旋转速度的较长滚动平均值、压力差、扭矩等的5%、10%、15%、20%(或一些其他百分比)以上时,活动元件被致动。
在至少一个示例中,当以恒定的WOB穿过均质地层进行钻井时,钻井时钻头上的扭矩可保持近似恒定。预期扭矩值可以是目标参数,并且测量的扭矩可以是测量的井下参数。如果钻头上的扭矩增加到致动阈值以上(例如,特定值或基于与该值之差的值),或降至致动阈值以下,则活动元件可能会沿井下或其他方向移动将向地层施加力(支撑一部分WOB)并减轻其他部件(例如切割结构)的重量,从而限制甚至阻止钻头(来自地层)的扭矩克服扭矩由井下马达提供,期其可能导致马达失速。
在一些实施例中,将至少一个井下参数与目标参数进行比较包括将至少一个井下参数与该井下参数的多个阈值进行比较。例如,第一阈值和第二阈值可以每个分别与活动元件的第一移动和/或力的量以及活动元件的第二移动和/或力的量相关联。因此,如果测量或计算的值超过第一阈值,则可以将活动元件移动第一量(或者可以施加第一力的量),但是如果测量或计算的值超过第一和第二阈值两者,则可以将活动元件移动第二量(或可以施加第二力的量)。
在一些实施例中,第一阈值和第二阈值是由钻具操作员或由钻具的制造商或服务商设定的标称值。例如,第一阈值可以是钻头的旋转速度为90RPM,第二阈值可以是钻头的旋转速度为80RPM。在其他示例中,第一阈值和第二阈值可以涉及在不同时间段上计算的滚动平均值。例如,第一阈值可以是当钻头旋转速度或扭矩的30秒滚动平均值低于扭矩源旋转速度或扭矩的80%时,第二阈值可以是0.5秒滚动平均值低于扭矩源旋转速度或扭矩的60%时。超过第一阈值可能会提示活动元件向地层施加的力较小,或者致动持续时间较短,以允许钻头加速并与扭矩源匹配,而超过第二阈值可能表明井下行为发生了更严重的变化并提示在范围或持续时间方面对活动元件进行更积极的干预,以限制或防止马达失速或粘滑。
在另一个示例中,多个不同的井下参数的测量值或测量值的差可用于确定何时致动活动元件。例如,第一阈值可以与施加到钻头的测量扭矩相关联,第二阈值可以与钻头旋转速度相关联。施加到钻头的测量扭矩可以在第一阈值之内,并且测量的钻头旋转速度可以在第二阈值之内,但是测量的扭矩与目标扭矩值的复合偏差与测量的钻头旋转速度与目标钻头旋转速度的偏差可能导致活动元件被致动。
在特定示例中,与目标参数值的20%的总偏差可能导致活动元件被致动。测得的井下参数的不同组合可能导致20%的总偏差和致动的活动元件。例如,第一井下参数的10%偏差与第二井下参数的10%偏差相结合可以导致活动元件被致动。在另一个示例中,第一井下参数的15%偏差与第二井下参数的5%偏差相结合可以导致活动元件被致动。在又一示例中,第一井下参数的20%偏差与第二井下参数的0%偏差相结合可以导致活动元件被致动。在另一示例中,第一井下参数的2%偏差与第二井下参数的18%偏差相结合可以导致活动元件被致动。如鉴于本文的公开将认识到的,也可以测量和比较两个以上的参数以确定用于触发活动元件的致动的总偏差。
在一些实施例中,当所测量的井下参数的总偏差超过致动阈值时,可以致动活动元件。例如,当所测量的井下参数的总偏差相对于每个井下参数的阈值超过100%偏差时,可以致动活动元件。在至少一个示例中,施加到钻头的扭矩可以具有20%的阈值。另外,井下马达的旋转速度可以具有10%的致动阈值。
例如,如果在钻头上测得的扭矩偏离目标参数值达致动阈值的50%(例如,测得的扭矩为10%偏差,而致动阈值为20%扭矩变化),并且井下马达的旋转速度偏离目标参数值达到致动阈值的50%(例如,测得的旋转速度为5%的偏差,而致动阈值为10%的旋转速度变化),则当总偏差为100%(即,扭矩偏差为50%+旋转速度偏差为50%)时,可以致动活动元件。在其他实施例中,通过同时比较三个或更多个测得的井下参数与目标参数值和/或阈值(例如钻头相对于扭矩源的相对旋旋转速度率、钻头上的扭矩、钻头上的压降、地层硬度、地层硬度的变化、地层孔隙率、地层流体压力、钻井液温度或其他井下参数),来致动活动元件。在至少一些实施例中,CPU或其他处理器可以使用人工智能或机器学习来回顾运行中的历史数据,并预测何时可能发生粘滑行为或马达失速。例如,可以评估与井下参数、振动、涡旋、流体流动、钻屑运输等相关的多个数据点,并且来自那些学习的信息可以建立动态阈值,该动态阈值预测未来的粘滑行为和马达失速以激活该活动元件。
在一些实施例中,计算测得的井下参数与目标参数之间的差并将测得的井下参数与阈值进行比较还包括将至少一个井下参数与目标参数进行比较。例如,施加到钻头的扭矩相对于期望扭矩的目标参数值的10%的偏差可能会促使活动元件开始移动,从而开始移动活动元件。在另一示例中,计算所测量的井下参数与目标参数之间的差可以包括将所测量的井下参数与多个阈值进行比较。例如,多个阈值可包括施加到钻头的扭矩的10%和施加到钻头的扭矩的50%的偏差。如果测得的井下参数是施加到钻头的扭矩相对于目标参数值的20%偏差,则致动器可能会导致活动元件的移动以施加活动元件可以施加的第一最大力的量(例如,最大力的20%)。例如,对于可施加10,000磅力(lbf)(44.5kN)的活动元件,该活动元件可施加2,000lbf(8.9kN)。但是,如果施加到钻头的扭矩超过第二阈值(例如,扭矩目标参数值的50%的偏差),则可以将活动元件致动不同的量(例如,最大力的100%)。这样,对于上述活动元件,可将10,000lbf(44.5kN)的全力施加到活动元件上,以限制或防止马达失速或粘滑。
方法744还包括可选地在754处使活动元件相对于钻头主体移动,类似于关于图6所描述的。活动元件相对于钻头主体的移动可以包括使活动元件远离钻头主体或进入钻头主体中。活动元件远离钻头主体并朝向地层的移动可以施加力或增加施加到地层的力。活动元件施加的力或增加的施加力可增加由活动元件支撑的WOB的部分,并减小施加到切割元件或切割结构的其他部分的WOB的部分。活动元件朝向或进入钻头主体并远离地层的移动可以去除施加的力或减小施加到地层的力。活动元件施加的力的减少可以减少活动元件支撑的WOB的部分,并增加施加到切割结构的WOB的部分。
在一些实施例中,在754处使活动元件相对于钻头主体移动包括在打开状态和关闭状态之间移动阀以改变施加到活动元件的液压。例如,打开阀允许液压流体的流动和/或增加液压流体的液压,以使活动元件远离钻头主体并朝向地层移动。在其他示例中,关闭阀限制和/或防止液压流体的流动和/或降低液压流体的液压,以将活动元件移动到钻头主体中并远离地层。
在其他实施例中,在754处使活动元件相对于钻头主体移动包括致动流体泵以改变施加至活动元件的液压。例如,泵可以是单作用活塞泵、双作用活塞泵、旋转泵、渐进排量腔泵或其他流体泵。在其他实施例中,活动元件可通过一个或多个马达移动,例如伺服马达、步进马达、线性致动器、蜗轮、电磁体或其他电子控制装置,以移动活动元件。
另外,并且如关于图6所讨论的,在749处控制钻头的活动元件的移动可以包括在750处对至少一个井下参数进行连续、迭代或重复的测量,在751处计算测得的井下参数和目标参数值之间的差值,在753处将差值与致动阈值进行比较,在754处将活动元件进行移动。因此,如果在753处的比较不会导致在754处活动元件的移动,则方法744可以包括再次测量井下参数750并继续进行图7所示和相对于图7所述的动作。类似地,如果在754处活动元件移动,则可以在750处再次测量井下参数,并751处计算该差值。利用在753处进行比较时确定的足够的差值,可以在754处将活动元件继续保持在移动位置或活动位置。在另一个示例中,在753处将该差值与阈值进行比较可以是与停用阈值的比较,并且在有足够的差值(或没有足够的差值)的情况下,活动元件相对于钻头主体的移动可能是在754处将活动元件从活动位置缩回。
图8是示出在井下环境中控制切割工具的方法844的另一实施例的流程图。切割工具可包括任何合适的井下切割工具,包括钻头,为便于描述图8而引用了该钻头。在所示的实施例中,方法844包括在846处将钻头下钻到井下环境中,并在848处使钻头相对于地层旋转。这些动作类似于或相同于相对于图6和图7描述的相应动作。
图8的方法844进一步包括在849处控制钻头的活动元件的移动。控制活动元件的移动包括在850处测量至少一个井下参数,在851处计算测得的井下参数与目标参数之间的差值,在853处将该差值与致动阈值进行比较,并在854处使活动元件相对于钻头主体移动以向地层施加力,类似于关于图7所描述的。在一些实施例中,测量至少一个井下参数包括使用与处理器(例如图3、4的CPU 338、438)通信的至少一个传感器(例如,图2-4的传感器240-1、240-2、240-3、340、440)。如关于图6和图7所描述的,井下参数可以是钻头周围的周围地层的特性或者是钻头或钻柱的特性。
在一些实施例中,可以将活动元件移向伸出状态以在固定的持续时间内向地层施加力。例如,在854处移动活动元件包括以致动速率和/或以致动持续时间来移动活动元件。在一些实施例中,致动速率是固定的,而在其他实施例中,致动速率根据测得的井下参数、与目标参数的偏离量、测得的井下参数超过阈值的量或其组合而变化。例如,致动速率可以在当测得的井下参数距目标参数较远时大于当测得的井下参数距目标参数较近时。作为示例,活动元件可以朝向伸出状态移动的速率在当所测量的井下参数偏离目标参数50%时比当所测量的井下参数偏离目标参数20%时更大。在其他示例中,活动元件朝向伸出状态移动的速率在当第一测量的井下参数偏离第一目标参数20%时比与第二测量的井下参数偏离第二目标参数20%时更大。在其他示例中,活动元件朝向伸出状态移动的速率在当第一测量的井下参数超过第一阈值时比当第二测量的井下参数超过相同于、小于或大于第一阈值的第二阈值时更大。
在一些实施例中,致动持续时间是固定的。例如,活动元件致动的每个实例可具有0.05秒、0.1秒、0.25秒、0.5秒、1.0秒、1.5秒、2.0秒、3.0秒、5.0秒、10秒的致动持续时间或其他长度的致动持续时间,或两者之间的任何内容。在其他实施例中,致动持续时间可以根据所测量的井下参数、与目标参数的偏离量、所测量的井下参数超过阈值的量或其组合而变化。例如,活动元件可以保持在伸出状态或另一致动状态的持续时间在当第一测量的井下参数触发活动元件的致动时比当第二测量的井下参数触发活动元件的致动时更长。活动元件保持致动(例如,从钻头突出最大距离和/或向地层施加最大力)的时间在当测得泥浆马达两端的压降超过第一阈值时比当测得钻头旋转速度超过第二阈值时更长。
在另一示例中,活动元件保持在伸出状态或另一致动状态下的持续时间在当测得的井下参数距目标参数较远时比测得的井下参数距目标参数较近时更长。例如,如果测得的泥浆马达两端的压降在0.5秒内变化了80%,则活动元件可以保持致动的持续时间比由第二测得的井下参数(例如,地层流体压力的变化)触发的另一次致动更长。这可能是因为高压降可被认为在钻井液中产生了相关的压力波,当压力波在流体导管中移动时,该压力波很可能对泥浆马达造成损坏,并且压力波可能会花费更多的时间在钻井液稳定,以限制或防止对泥浆马达的损坏。
在其他实施例中,可以将活动元件移向伸出状态并施加力(减小另一切割结构上的重量比例),直到一个或多个井下参数被测量为处于停用阈值之内。例如,图8的方法844包括在855处将该差值与停用阈值进行比较并且在867处使活动元件相对于钻头主体移动以减小活动元件施加到地层的力。在致动之后,活动元件可以在减轻触发致动的条件或与粘滑行为或马达失速相关的其他条件时朝向缩回状态缩回。
在一些实施例中,在将测得的井下参数和目标参数值之间的差值与停用阈值进行比较并且该差值小于停用阈值时,将活动元件保持在致动状态并缩回。例如,当所测量的井下参数超过致动阈值时,活动元件可以被致动并保持在致动状态,直到所测量的井下参数改变并且该差值被测量为处于停用阈值之内。
在一些示例中,致动阈值和停用阈值相同。例如,如果测得的井下参数是钻头旋转速度,则致动阈值可以是从钻头旋转速度的滚动平均值变化20%。当测得的钻头旋转速度小于滚动平均值的80%时,将激活活动元件。如图8所示,即使在854处移动了活动元件之后,方法844包括在850处继续测量井下参数,在851处计算测得的井下参数与目标参数值之间的差值,并在853处将该差值与致动阈值进行比较。如果计算出的差值变得小于20%阈值(即,目标大于滚动平均值的80%),则在857处活动元件可以相对于钻头主体移动并完全或部分地缩回以减小施加到地层的力。在这样的实施例中,致动阈值既可以充当致动阈值又可以充当停用阈值。这种操作也适用于图6和7的方法,其中在654、754处使活动元件相对于钻头主体移动可以包括响应于测得的参数或计算出的差值超过目标参数值或阈值来伸出所述活动元件,或者响应于测得的参数或计算出的差值不再超过目标参数或阈值而缩回活动元件。另外,在一些实施例中,当测得钻头旋转速度大于滚动平均值的120%时,活动元件被致动,并且活动元件保持在致动状态,直到钻头旋转速度小于滚动平均值的120%。
在其他示例中,致动阈值和停用阈值不同,使得活动元件的移动表现出滞后现象。例如,测得的井下参数可以是钻头旋转速度,致动阈值可以是从钻头旋转速度的滚动平均值变化20%,而停用阈值可以从钻头旋转速度的滚动平均值偏差10%。在这样的示例中,当测量到钻头旋转速度小于滚动平均值的80%或大于滚动平均值的120%(即,与滚动平均值相差至少20%)时,活动元件被致动,并且活动元件保持在致动状态,直到钻头旋转速度恢复到大于滚动平均值的90%或小于滚动平均值的110%。
在一些实施例中,随着时间推移,重复的致动可能导致对活动元件和/或使活动元件移动的液压或其他动力装置的损坏。因此,滞后可以通过致动活动元件直到测得的井下参数比致动阈值更接近目标参数值来延长活动元件的使用寿命。例如,当致动阈值和停用阈值相同时,测得的井下参数可以保持接近该阈值,从而导致活动元件的重复和快速致动。在一些实施例中,本公开的方法还可以包括对给定时段内的激活次数进行计数。如果激活次数超过激活计数阈值,则可以调整致动阈值、停用阈值、动态变量(例如,滚动平均长度或测量值平均长度)以减少激活次数。在另一个实施例中,如果激活次数超过激活计数阈值,则致动器可以被置于睡眠模式。例如,CPU可能会在特定时间段内停止处理测量,直到工具返回地面,或者直到接收到从睡眠模式中唤醒的信号为止。激活计数阈值可以是任何合适的值,但是在一些实施例中,可以包括每分钟超过两个激活、每分钟超过三个激活、每分钟超过五个激活、每五分钟超过十个激活或其他值,或者两者之间的任何值。
在一些实施例中,停用阈值可以在一段时间或钻井距离上作为致动量的函数而改变。停用阈值可能变得更接近目标参数值,这可能导致活动元件保持致动状态,直到测得的井下参数更接近目标参数为止。在先前的示例中,其中致动阈值是从钻头旋转速度的滚动平均值变化20%,并且停用阈值是从钻头旋转速度的滚动平均值偏差10%,该停用阈值可以变化。例如,当活动元件在一分钟内被致动超过例如四次时,停用阈值可以从钻头旋转速度的滚动平均值改变7.5%或5%。因此,活动元件将保持较长时间的致动,直到测得的钻头旋转速度在钻头旋转速度的滚动平均值的7.5%或5%之内。将井下参数恢复为更接近目标参数值可以使井下参数更远离致动阈值并限制所需致动的次数。
另外,活动元件可以以与致动速率相同或不同的移动速率朝向缩回状态移动。在一些实施例中,活动元件以致动速率被致动并朝向伸出状态或其他致动状态移动,并且活动元件以收缩率朝向收缩状态收缩。大于缩回速率的致动速率可允许活动元件快速响应由一个或多个传感器测量的不利条件,而相对较慢的缩回速率可允许钻头与地层重新接合而不会引起促进致动的相同条件。例如,响应于钻头上的扭矩的快速增加,活动元件可以在不到0.1秒的时间内伸出到伸出状态,以迅速做出反应并限制和/或防止马达失速或粘滑。然后,活动元件可以在2.0秒内缩回至缩回位置,以使钻头和钻头的切割元件与地层接合,而切割元件不接触地层的相同表面,并且在钻头上产生扭矩的另一个突然增加。
图8的方法844至少部分是迭代过程,并且可以用于重复地移动活动元件以增加和减小由活动元件施加到地层或其他工件上的力。例如,如相对于图7所描述的,在849处控制钻头的活动元件的移动可以包括在850处连续、迭代或重复地测量至少一个井下参数,在851处计算所测量的井下参数和目标参数值的差值,在853处将差值与致动阈值进行比较,并在854处进行活动元件的移动。在850处的测量可以正在进行,使得即使在其他测量不触发活动元件的移动之后,也可以导致在854处的活动元件的移动。
另外,在855处,当将所测量的至少一个井下参数与停用阈值进行比较时,方法844可以包括在857处移动活动元件,或者替代地可以不移动活动元件。在任一种情况下,方法844可包括在849处返回控制钻头的活动元件的移动并在850处测量至少一个井下参数,并继续将测得的差值与激活阈值或停用阈值进行比较,以相应地移动活动元件。此外,为简单起见,图8示出在855处将差值与激活阈值进行比较之后,在849处返回控制钻头的活动元件的移动。但是,在某些实施例中,在855处当活动元件已经被移动向工件施加一力(或增加的力)时,该方法可能不会在853处将测得的井下参数和目标参数的差值与致动阈值进行比较。例如,当使用开关阀来控制活动元件的移动并且该阀处于与向工件施加力的伸出的活动元件相对应的位置时,方法844可以跳过动作853和854,因此,在855处将计算出的差值直接与停用阈值进行比较。
图9-1是在井下环境中具有活动元件928的钻头910的实施例的侧视截面图。当钻头910相对于地层/工件901旋转时,钻头910从地层910(或套管、井下落鱼(fish)或其他工件)去除材料。对于给定的WOB,WOB的一部分应用于切割结构,其包括切割元件918。定位在钻头910的刀片916上的切割元件918与地层901接合,并且切割结构上的重量可以改变钻头910的切割元件918的DOC。
定位在钻头910、BHA或钻柱中的至少一个传感器940可以测量至少一个井下参数。活动元件928在钻井操作期间可以保持在缩回状态(即,定位成最接近和/或位于钻头主体912内),直到传感器940测量的井下参数超过阈值,偏离目标参数或以其他方式测量触发致动的值为止,如本文所述的。在一些实施例中,活动元件928在活动元件928的井下端处包括超硬元件956。例如,活动元件928可以包括附着到到井下端的带尖顶的切割元件。当活动元件928处于缩回或展开状态时,带尖顶的切割元件可以与地层901接合并且辅助钻头进行跟踪。当活动元件928接触地层901时,超硬元件956可增加活动元件928的工作寿命和抗腐蚀性。尽管图9-1示出了超硬元件956在缩回状态下伸出到钻头主体912的面的外部,在其他实施例中,超硬元件956或活动元件928的其他井下最下部可以在缩回状态下与钻头面齐平或凹进其中。
图9-2是在致动活动元件928之后的图9-2的钻头910的实施例的侧视截面图。活动元件928可以远离钻头主体912移向地层901以将力施加到地层901。在一些实施例中,活动元件928移动由行程958表示的距离。行程958表示移动范围以及活动元件929从缩回位置(请参见图9-1)移动到伸出位置(图9-2)的距离。行程958可以是具有下限值、上限值或下限值和上限值及下限值的范围,包括以下中的任一个:0.1英寸(0.25厘米)、0.25英寸(0.63厘米)、0.5英寸(1.27厘米)、0.75英寸(1.91厘米)、1.0英寸(2.54厘米)、1.25英寸(3.18厘米)、1.5英寸(3.81厘米)、1.75英寸(4.45厘米)、2.0英寸(5.08厘米)或它们之间的任何值。在一些示例中,行程958大于0.1英寸(0.25cm)。在其他示例中,行程958小于2.0英寸(5.08厘米)。在其他示例中,行程958在0.1英寸(0.25厘米)和2.0英寸(5.08厘米)之间、0.25英寸(0.63厘米)和1.75英寸(4.45厘米)之间,或在0.5英寸(1.27英寸)和1.5英寸(3.81厘米)之间。在至少一个示例中,行程958为大约1.0英寸(2.54厘米)。在其他示例中,行程958小于0.1英寸(0.25mm)或大于2.0英寸(5.08厘米)。
在一些实施例中,被激活或伸出的活动元件928从切割结构的井下尖端轴向偏移(即,从活动元件928的井下尖端到切割元件918或刀片916的最井下点的距离)一位移距离964。在一些实施例中,位移距离964在具有下限值、上限值或下限值和上限值的范围内,包括以下中在任一个:0.1英寸(0.25厘米)、0.25英寸(0.63厘米)、0.5英寸(1.27厘米)、0.75英寸(1.91厘米)、1.0英寸(2.54厘米)、1.25英寸(3.18厘米)、1.5英寸(3.81厘米)、1.75英寸(4.45厘米)、2.0英寸(5.08厘米)、2.5英寸(6.35厘米)、3.0英寸(7.62厘米)、5.0英寸(12.7厘米)或它们之间的任何值。在一些示例中,位移距离964大于0.1英寸(0.25厘米)。在其他示例中,位移距离964小于2.0英寸(5.08厘米)或小于5.0英寸(12.7厘米)。在其他示例中,位移距离964在0.1英寸(0.25厘米)和5.0英寸(12.7厘米)之间。在其他示例中,伸出的位移964在0.25英寸(0.63厘米)和3.0英寸(7.62厘米)之间、0.5英寸(1.27厘米)和2.5英寸(6.35厘米)之间,或0.5英寸(1.27厘米)和1.75英寸(4.45厘米)之间。在至少一个示例中,伸出的位移964为大约1.0英寸(2.54厘米)。在其他示例中,伸出的位移964小于0.1英寸(0.25厘米)或大于5.0英寸(12.7厘米)。
在一些实施例中,活动元件928被配置为在具有包括以下中的任一个的下限值、上限值或下限值和上限值的范围内向地层施加力:500磅(lbs.)(2.22千牛(kN))、1,000lbs.(4.45kN)、2,000lbs.(8.90kN)、4,000lbs.(17.8kN)、6,000lbs.(26.7kN)、8,000lbs.(35.6kN)、10,000lbs.(44.5kN)、15,000lbs.(66.8kN)、20,000lbs.(89.0kN)、30,000lbs.(133.5kN)或两者之间的任何值。在某些示例中,该力大于500lbs.(2.22kN)。在其他示例中,该力小于30,000lbs.(133.5kN)。在其他示例中,该力在500lbs.(2.22kN)和30,000lbs.(133.5kN)之间、在1,000lbs.(4.45kN)和15,000lbs.(66.8kN)之间,或在2,000lbs.(8.90kN)和20,000lbs.(89.0kN)之间。在至少一个示例中,该力为约10,000lbs.(44.5kN)。在其他示例中,该力小于500lbs.(2.22kN)或大于30,000lbs.(133.5kN)。在至少一个示例中,该力是WOB的至少10%、至少20%或至少30%(例如,以使另一切割结构上的总重量减少分别为WOB的至少10%、至少20%或至少30%)。
在一些实施例中,活动元件928以在具有包括以下中任一个的上限值、下限值或上限值和下限值的范围内的致动时间从缩回状态移动到致动状态(例如,伸出状态):0.1秒、0.2秒、0.3秒、0.4秒、0.6秒、0.8秒、1.0秒、1.5秒、2.0秒或它们之间的任何值。在一些示例中,致动时间可以大于0.1秒。在其他示例中,致动时间可以小于2.0秒。在其他示例中,致动时间可以小于1.0秒。在另外的示例中,致动时间可以小于0.5秒。在至少一个示例中,致动时间可以小于0.1秒。
在一些实施例中,活动元件928以在具有包括以下中任一个的上限值、下限值或上限值和下限值的范围内的缩回时间从致动状态(例如,伸出状态)移动到缩回状态:0.1秒、0.2秒、0.3秒、0.4秒、0.6秒、0.8秒、1.0秒、1.5秒、2.0秒、4.0秒、6.0秒、8.0秒、10.0秒或它们之间的任何值。在一些示例中,缩回时间可以大于0.1秒。在其他示例中,缩回时间可以小于10.0秒。在进一步的示例中,缩回时间可以小于5.0秒、小于2.0秒或小于1.0秒。在一些实施例中,缩回时间与致动时间是相同的。在其他实施例中,缩回时间小于致动时间。在其他实施例中,缩回时间大于致动时间。例如,活动元件928可以比活动元件缩回更快地致动。较慢的缩回可以允许钻头910上的WOB和/或扭矩更逐渐地增加,从而限制和/或防止进一步的粘滑行为或马达失速。
为了将力施加到地层上而不会损坏活动元件928或不会太快地穿透地层901以减小钻头的刀片上的WOC,可能需要将活动元件928上的载荷分配到更大的区域上。在某些情况下,活动元件928上载荷分布的区域与活动元件直径960有关。例如,较大的活动元件直径960(即,活动元件928的切割端的直径或宽度)可提供更大的面积,并允许活动元件928比小直径活动元件928(例如,通过减少点载荷)向具有更低的硬度或更大孔隙率的地层施加更大的力。在其他示例中,较小的活动元件直径960和活动元件928的切割端可以使活动元件928占据较少的钻头910,从而使钻头910具有更积极性的切割轮廓和更大的ROP。在一些实施例中,活动元件直径960通过在具有包括以下中的任一个的下限值、上限值或下限值和上限值的范围内的主体直径比与钻头主体直径962相关:2%、4%、6%、8%、10%、15%、20%、25%、35%或它们之间的任何值。在一些示例中,主体直径比大于2%。在其他示例中,主体直径比小于35%。在其他示例中,主体直径比在2%至35%之间、4%至25%之间或2%至15%之间。在特定的示例中,主体直径比为大约5%、大约10%或大约12.5%。在其他示例实施例中,主体直径比小于2%或大于35%。
在相同或其他实施例中,活动元件直径960(或非圆柱形活动元件的宽度)与钻头910的保径部直径965有关,其保径部直径比在具有包括以下中的任一个的下限值、上限值或下限值和上限值的范围:1%、2%、5%、10%、15%、20%、25%或它们之间的任何值。在一些示例中,保径部直径比大于1%。在其他示例中,保径部直径比小于25%。在其他示例中,保径部直径比在1%和25%之间、2%和20%之间,或3%和12%之间。在特定示例中,保径部直径比为约3%、约8.5%或约10%。在其他示例实施例中,保径部直径比小于1%或大于25%
图10是示出具有诸如关于图9-1和9-2所述的活动元件的切割工具的示例性使用的曲线图1066,其具有活动元件的致动和停用滞后行为。该曲线图示出了随时间测量的钻头1068的瞬时旋转速度和第一平均值,该第一平均值在所示的曲线图1066中是0.5秒滚动平均值1070。如本文中所讨论的,滚动平均值1070可以在一些实施例中用作用于控制切割工具上的一个或多个活动元件的激活的所测量的井下参数值。
可以将第一平均值1070与第二平均值进行比较,第二平均值在曲线图1066中是30秒的滚动平均值。当在t1处第一平均值1070基于第二平均值下降到致动阈值1072以下(例如,超过与第二平均值之差的20%)时,打开阀以致动活动元件。在t2处,阀保持打开并且活动元件被致动,直到第一平均值1070大于停用阈值1074(例如,小于与第二平均值的差的10%)。在关闭阀并停用活动元件后,钻头1068的旋转速度开始再次下降,第一平均值1070在t3处降至致动阈值1072以下,并且阀再次打开以重新致动活动元件,直到钻头1068的旋转速度再次在t4处高于停用阈值1074(例如,与第二平均值相差小于10%)。
活动元件的重复和/或快速致动会磨损活动元件或钻头主体围绕活动元件的区域,或者耗尽井下动力源。在具有挑战性的环境或钻井条件下进行操作期间,活动元件可能每分钟致动几次。当活动元件在一段时间内致动超过致动极限时,例如30秒内三次、一分钟内四次、一分钟内五次、90秒内八次、两分钟内十次或一段时间内其他数量的致动,活动元件可进入如本文所述的睡眠模式。在至少一些实施例中,睡眠模式限制了活动元件的磨损,增加了活动元件的工作寿命,或者增加了井下动力源的工作寿命。
当处于睡眠模式时,活动元件可以相对于钻头主体在缩回位置或伸出位置保持静止。在一些示例中,活动元件在进入睡眠模式时移动到缩回位置。在其他示例中,即使轴向位置不是缩回位置,活动元件在进入睡眠模式时也保持相对于钻头主体恒定的轴向位置。在一些实施例中,睡眠模式具有至少一分钟的持续时间。在其他实施例中,睡眠模式具有至少三分钟的持续时间。在其他实施例中,睡眠模式具有至少五分钟的持续时间。在其他实施例中,睡眠模式一直持续到工具起钻到地面或接收到唤醒信号。唤醒信号可以从地面发送,也可以从井下发出。例如,MWD可以监视井下状况并确定何时唤醒活动元件。在一些实施例中,睡眠模式也禁用井下参数的测量,而在其他实施例中,一个或多个井下参数的井下测量可以在睡眠模式期间继续。在至少一些实施例中,当井下工具进入睡眠模式时,可以将信号发送到地面、MWD或另一位置以向操作员或工具警告该睡眠模式。
在一些实施例中,活动元件移动的距离与用于使活动元件在地层内移动这样的距离的力之间的关系是非线性的。例如,图11是示出了活动元件的位移相对于用于移动活动元件并获得该位移的力的示例关系的曲线1178的曲线图1176。活动元件从缩回位置的初始移动可能对地层施加很小的力或不施加力,因为活动元件可能不与地层接触,或者钻头的牙轮内的地层可能松散地固结和/或不支撑。因此,如在活动元件的初始移动期间施加的不一致的力所反映的那样,当活动元件朝向致动位置移动时,地层可能在与活动元件接触时破裂或断裂。活动元件可以继续朝向致动位置移动,并在进一步穿透和/或压缩地层时施加增加的力。曲线1178示出了通常的指数关系,其中,越来越大的位移利用了指数增长的力。特别地,曲线图1176示出了对于第一个0.4英寸(1.02cm)的大致平坦或线性的关系,此后,斜率过渡并且急剧增加。举例来说,在曲线图1176中,大约4,000lbf(17.8kN)用于将活动元件移动第一个0.6英寸(1.5厘米),或通过第一个0.6英寸(1.5厘米)的移动被施加到地层。但是,附加的4,000lbf(17.8kN)只能使活动元件移动大约0.12英寸(0.3厘米)。再增加另一4,000lbf(17.8kN)或合计12,000lbf(53.4kN),则只能将活动元件再移动约0.06英寸(0.15厘米)。
图11的曲线图1176示出了活动元件在不同地层中的移动;但是,具体曲线图将根据切割元件的几何形状、地层硬度、地层强度、活动元件的起始位置等而变化。例如,相对较软的地层可以在斜率过渡到较陡的斜率之前以较小的力允许更大的位移。在至少一些实施例中,设计钻头或其他切割工具包括确定用于钻头和地层组合的活动元件的过渡,并基于该过渡确定行程。例如,由于在过渡后需要显著更多的力来移动活动元件,因此回程可能会减少,并且钻头可以设计为比在过渡处的位移额外位移10%、20%、30%或40%。
在至少一个实施例中,根据本公开的钻井系统调节切割工具上的重量分布,以限制钻井系统的粘滑行为、马达失速或其他井下动力学。该钻井系统包括一个或多个活动元件,例如中央千斤顶,其向地层施加力以减少切割结构上的WOB的部分并减少DOC。可以响应于测量或计算一个或多个井下参数来致动活动元件,该参数指示或预测粘滑行为的存在和/或指示可能导致马达失速或损坏井下马达的状况。
主要参考井眼钻井操作描述了钻井系统的实施例;然而,本文所述的钻井系统可以用于井眼钻井以外的应用中。在其他实施例中,本公开的钻井系统可以在井眼或用于勘探或生产自然资源的其他井下环境之外使用。例如,本公开的钻井系统可以在用于放置公用设施管线的井孔中使用。因此,术语“井眼”、“井孔”等不应被解释为将本公开的工具、系统、组件或方法限于任何特定的行业、领域或环境。
本文描述了本公开的一个或多个具体实施例。这些描述的实施例是当前公开的技术的示例。另外,为了提供对这些实施例的简要描述,说明书中可能没有描述实际实施例的所有特征。此外,提供各种示例作为示例方式的图示,其中可以使用本公开的系统和工具。例如,提供了某些井下参数(例如,钻头旋转速度)的示例,这些井下参数可以以某些方式(例如,与顶部驱动器速度的比较或特定的激活持续时间)被测量和比较用于激活或停用。这些示例是说明性的,并且鉴于本公开,本领域普通技术人员将理解,这里描述的任何井下参数可以与任何其他激活/停用方法结合使用。因此,本文关于任何实施例描述的任何元件可以与任何其他实施例结合使用,除非这些特征被描述为相互排斥的程度。
另外,应当理解,对本公开的“一个实施例”或“一实施例”的引用无意被解释为排除也包含所述特征的其他实施例的存在。本文所述的数字、百分比、比率或其他值旨在包括该值,以及“大约”或“近似”所述值的其他值,如本公开的实施例所包含的本领域普通技术人员所理解的。因此,所述值应被解释得足够宽泛,以包括至少足够接近所述值的值,以执行期望的功能或实现期望的结果。所述值至少包括在合适的制造或生产过程中预期的变化,并且可以包括在所述值的5%以内、1%以内、0.1%以内或0.01%以内的值。
鉴于本公开,本领域普通技术人员应当认识到,等同构造不脱离本公开的精神和范围,并且在不脱离本公开的精神和范围的情况下,可以对本文公开的实施例进行各种改变、替代和变更。包括功能性“装置加功能”语句在内的等同结构旨在涵盖如在此描述的执行所述功能的结构,包括以相同方式操作的结构等同物和提供相同功能的等同结构。申请人的明确意图是,不对任何权利要求援引装置加功能或其他功能性声明,但那些词语“用于……的装置”与相关功能一起出现的声明除外。落入权利要求的含义和范围内的对实施例的每个添加、删除和修改将被权利要求所涵盖。
如本文所用的,术语“大约”、“约”和“基本上”表示接近所述量的量,该量在标准制造或工艺公差之内,或者其仍执行期望的功能或达到期望的结果。例如,术语“大约”、“约”和“基本上”是指以下量:在所述量的少于5%内、少于1%的内、少于0.1%内以及少于0.01%。此外,应当理解,在前面的描述中的任何方向或参考系仅是相对方向或移动。例如,对“上”和“下”或“上方”或“下方”的任何引用仅描述相关元件的相对位置或移动。
在不脱离本发明的精神或特征的情况下,本发明可以以其他具体形式来体现。所描述的实施例应被认为是说明性的而不是限制性的。因此,本公开的范围由所附权利要求而不是前面的描述指示。在权利要求的等同含义和范围内的改变应包含在它们的范围之内。
- 控制井下行为的系统和方法
- 用户行为分析的控制方法和用户行为分析的控制系统