一种北斗卫星导航自动安全定位智能计算平台
文献发布时间:2023-06-19 11:24:21
技术领域
本发明涉及计算平台技术领域,尤其涉及一种北斗卫星导航自动安全定位智能计算平台。
背景技术
传统的北斗卫星导航自动安全定位智能计算平台通过虚拟的数字计算以及数字模型建立来进行模拟,虚拟的模型需要手动建立且不易直观展示,每次计算不同的卫星的运动路径时都需更改数字模型,操作不便且不利于激发研究人员的灵感。
发明内容
(一)发明目的
为解决背景技术中存在的技术问题,本发明提出一种北斗卫星导航自动安全定位智能计算平台。
(二)技术方案
本发明提供了一种北斗卫星导航自动安全定位智能计算平台,包括平台主体和设置于平台主体上表面的智能计算机,还包括实物观摩机构,所述实物观摩机构包括固定连接于平台主体上表面的固定座,所述固定座的顶部转动连接有旋转柱,所述旋转柱的顶部固定连接有旋转台,所述旋转台的上表面中部固定连接有固定柱,所述固定柱的顶端固定连接有地球模型,所述地球模型的外侧设置有椭圆轨道,所述旋转台的内部活动设置有六个齿条,每个所述齿条均转动嵌接有一个螺套,每个所述螺套的内圈均螺旋套接有一个螺杆,每个所述螺杆的顶端均固定连接有一个橡胶卡夹,且单个所述椭圆轨道通过相邻的三个橡胶卡夹卡合支撑固定。
优选的,六个所述齿条以旋转台的中心点环形分布,所述旋转台的内部位于每个齿条的一侧均转动连接有一个能与齿条啮合连接的第二齿轮。
优选的,所述旋转台的内部位于每个第二齿轮的一侧均转动连接有一个第一齿轮,且所述第一齿轮通过链带与第二齿轮传动连接。
优选的,每个所述第一齿轮的上表面中部均固定连接有一个拨柱,且每个所述拨柱的顶端均贯穿旋转台的上表面。
优选的,每个所述螺杆的外表面均开设有竖向定位槽,所述旋转台的内壁固定连接有能与竖向定位槽相匹配的定位块。
优选的,所述旋转台的上表面开设有供螺杆水平移动的。
与现有的技术相比,本发明的有益效果是:通过在平台上设置实物观摩机构的设计,可以更加直观地观察研究卫星的运动路径,有助于对北斗卫星导航自动安全定位的计算和研究;
一、本方案中的椭圆轨道在地球模型外侧的位置可以手动设置和改变,且操作过程非常简便;
二、本方案中的橡胶卡夹可以在竖直方向改变位置也可以在水平方向改变位置,从而可以通过相邻的三个橡胶卡夹对倾斜的椭圆轨道进行卡合支撑;
三、本方案中的实物观摩机构可以水平旋转,方便研究人员多角度观摩研究。
附图说明
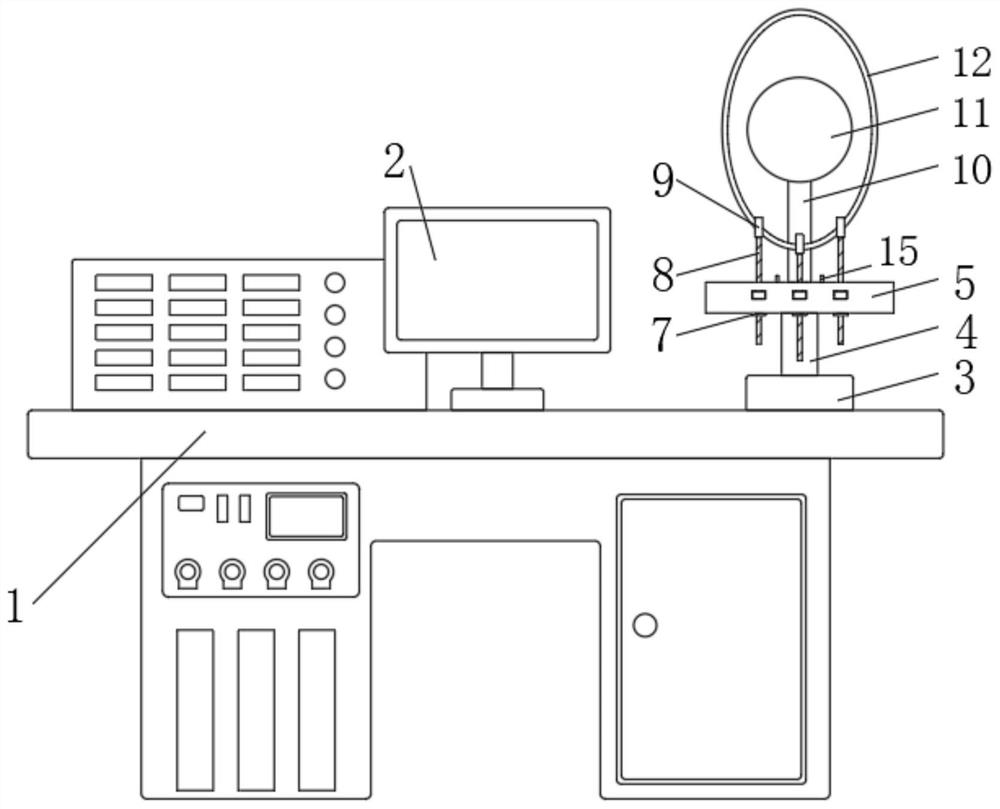
图1为本发明提出的一种北斗卫星导航自动安全定位智能计算平台的正视结构示意图;
图2为本发明实物观摩机构的俯视图;
图3为本发明旋转台的俯视向剖视图。
图中:1平台主体、2智能计算机、3固定座、4旋转柱、5旋转台、6齿条、7螺套、8螺杆、9橡胶卡夹、10固定柱、11地球模型、12椭圆轨道、13第一齿轮、14第二齿轮、15拨柱。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。
如图1-3所示,本发明提出的一种北斗卫星导航自动安全定位智能计算平台,包括平台主体1和设置于平台主体1上表面的智能计算机2,还包括实物观摩机构,实物观摩机构包括固定连接于平台主体1上表面的固定座3,固定座3的顶部转动连接有旋转柱4,旋转柱4的顶部固定连接有旋转台5,旋转台5的上表面中部固定连接有固定柱10,固定柱10的顶端固定连接有地球模型11,地球模型11的外侧设置有椭圆轨道12,旋转台5的内部活动设置有六个齿条6,每个齿条6均转动嵌接有一个螺套7,每个螺套7的内圈均螺旋套接有一个螺杆8,每个螺杆8的顶端均固定连接有一个橡胶卡夹9,且单个椭圆轨道12通过相邻的三个橡胶卡夹9卡合支撑固定。
在一个可选的实施例中,六个齿条6以旋转台5的中心点环形分布,旋转台5的内部位于每个齿条6的一侧均转动连接有一个能与齿条6啮合连接的第二齿轮14。
在一个可选的实施例中,旋转台5的内部位于每个第二齿轮14的一侧均转动连接有一个第一齿轮13,且第一齿轮13通过链带与第二齿轮14传动连接。
在一个可选的实施例中,每个第一齿轮13的上表面中部均固定连接有一个拨柱15,且每个拨柱15的顶端均贯穿旋转台5的上表面。
在一个可选的实施例中,每个螺杆8的外表面均开设有竖向定位槽,旋转台5的内壁固定连接有能与竖向定位槽相匹配的定位块。
在一个可选的实施例中,旋转台5的上表面开设有供螺杆8水平移动的16。
工作原理:传统的北斗卫星导航自动安全定位智能计算平台通过虚拟的数字计算以及数字模型建立来进行模拟,虚拟的模型需要手动建立且不易直观展示,每次计算不同的卫星的运动路径时都需更改数字模型,操作不便且不利于激发研究人员的灵感,本实施例中,通过在平台上设置实物观摩机构的设计,可以更加直观地观察研究卫星的运动路径,有助于对北斗卫星导航自动安全定位的计算和研究;本方案中的椭圆轨道12在地球模型11外侧的位置可以手动设置和改变,且操作过程非常简便;本方案中的橡胶卡夹9可以在竖直方向改变位置也可以在水平方向改变位置,从而可以通过相邻的三个橡胶卡夹9对倾斜的椭圆轨道12进行卡合支撑;首先,将椭圆轨道12的最低点与其中一个橡胶卡夹9卡合,然后将该橡胶卡夹9两侧的另外两个橡胶卡夹9上升,并沿着16的路径水平移动,直至两个橡胶卡夹9可以与椭圆轨道12接触并卡住椭圆轨道12即可;
竖直移动时,转动螺套7,通过螺套7与螺杆8之间的螺旋连接促使螺杆8上下移动,从而带动橡胶卡夹9上下移动;
水平移动时,转动拨柱15带动对应的第一齿轮13旋转,第一齿轮13通过链带带动第二齿轮14旋转,第二齿轮14通过与齿条6之间的啮合连接带动齿条6水平移动,齿条6带动螺套7以及与螺套7相连的螺杆8水平移动,从而带动橡胶卡夹9沿着16的路径水平移动。
在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、“顺时针”、“逆时针”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的设备或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
- 一种北斗卫星导航自动安全定位智能计算平台
- 基于北斗一代卫星导航系统的SOS自动授时智能手表