一种无人机停机坪主动抓取辅助降落装置
文献发布时间:2023-06-19 11:27:38
技术领域
本发明涉及无人机技术领域,具体为一种无人机停机坪主动抓取辅助降落装置。
背景技术
无人驾驶飞机简称“无人机”,英文缩写为“UAV”,是利用无线电遥控设备和自备的程序控制装置操纵的不载人飞机,或者由车载计算机完全地或间歇地自主地操作。与有人驾驶飞机相比,无人机往往更适合那些太“愚钝,肮脏或危险”的任务。无人机按应用领域,可分为军用与民用。军用方面,无人机分为侦察机和靶机。民用方面,无人机+行业应用,是无人机真正的刚需;目前在航拍、农业、植保、微型自拍、快递运输、灾难救援、观察野生动物、监控传染病、测绘、新闻报道、电力巡检、救灾、影视拍摄、制造浪漫等等领域的应用,大大的拓展了无人机本身的用途,发达国家也在积极扩展行业应用与发展无人机技术。
无人机在升降的过程中需要有一个平稳的平台停放,但无人机的操控较为灵敏,其停放过程很难对其具体停放位置进行精确的调整,因此需要的停机坪面积较大,但无人机的续航能力较差,在进行使用时需要将其携带到使用递减进行使用,若无人机的停机坪面积过大则会导致携带所需的空间较大,不便于携带,并且也影响无人机停放后的充电过程。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种无人机停机坪主动抓取辅助降落装置,具备体积小能够主动抓取降落位置等优点,解决了上述的问题。
(二)技术方案
为实现上述目的,本发明提供如下技术方案:一种无人机停机坪主动抓取辅助降落装置,包括移动底板,所述移动底板的上表面固定连接有支架杆,所述支架杆的顶部固定连接有移动安装板,所述移动安装板的上表面抵接有纵向移动板,所述纵向移动板的底部固定连接有纵向螺纹座;所述纵向移动板的上表面固定连接有导向滑槽,所述导向滑槽的侧面固定连接有滑动支撑块,所述滑动支撑块的一侧固定连接有横向驱动电机,所述横向驱动电机的输出端传动连接有横向驱动丝杠,所述横向驱动丝杠的外表面螺纹连接有横向螺纹座,所述横向螺纹座的顶部固定连接有停机坪;所述停机坪上表面的一端固定连接有防护板,所述停机坪的上表面设有限位卡套,所述停机坪的下表面与限位卡套相对应的位置设有限位连接机构,所述限位卡套的下表面固定连接有连接插杆,所述连接插杆的侧面设有限位孔;所述移动安装板的上表面位于纵向移动板的一侧设有充电模块。
优选的,所述移动安装板的下表面固定连接有悬挂安装板,所述悬挂安装板的侧面转动连接有纵向驱动丝杠,所述移动安装板的下表面固定连接有纵向驱动电机,所述纵向驱动丝杠的;另一端与纵向驱动电机的输出端传动连接。
优选的,所述移动安装板与纵向螺纹座相对的位置设有滑动槽,所述纵向螺纹座的一端穿过滑动槽螺纹连接在纵向驱动丝杠上。
优选的,所述移动安装板的下表面位于纵向驱动丝杠的两侧固定连接有复位安装块,两个所述复位安装块侧面相对应的位置分别设有纵向复位光敏电阻和纵向线束光源,所述纵向复位光敏电阻通过导线与纵向驱动电机电性连接。
优选的,所述纵向移动板的下表面固定连接有定向滑块,所述定向滑块的截面形状为山型,所述移动安装板的下表面设有与定向滑块相适配的导向槽。
优选的,所述停机坪的下表面抵接在滑动支撑块的上表面,所述停机坪的下表面位于滑动支撑块的一侧固定连接有导向滑块,所述导向滑块的一端滑动连接在导向滑槽内。
优选的,所述滑动支撑块的数量为两个,两个所述滑动支撑块侧面相对应的位置分别设有横向复位光敏电阻和横向线束光源,所述横向复位光敏电阻通过导线与横向驱动电机电性连接。
优选的,所述限位连接机构包括连接安装块,所述连接安装块的内部设有连接安装槽,所述连接安装槽内表面的顶部固定连接有连接弹簧,所述连接弹簧的另一端固定连接有下压板,所述下压板的两侧铰接有转动推杆,所述转动推杆的另一端铰接有侧插杆,所述下压板的下表面固定连接有上推杆,所述连接安装块的内部位于连接安装槽的两侧设有连接插槽,所述侧插杆的位置与限位孔的位置相对应。
优选的,所述移动安装板的上表面设有安装滑槽,所述安装滑槽内滑动连接有吸附滑块,所述吸附滑块的上表面固定连接有防护罩,所述吸附滑块的侧面设有吸附磁铁。
(三)有益效果
与现有技术相比,本发明提供了一种无人机停机坪主动抓取辅助降落装置,具备以下有益效果:
1、该无人机停机坪主动抓取辅助降落装置,通过纵向移动板、停机坪、横向驱动电机、横向驱动丝杠、纵向驱动电机和纵向驱动丝杠的配合设置,在使用的过程中能对停机坪的位置进行调整,从而主动的对无人机的降落位置进行抓取,更加的便于无人机的停放,并且减少了停机坪的整体面积大小,更加的易于携带。
2、该无人机停机坪主动抓取辅助降落装置,通过限位卡套、限位连接机构、连接插杆和限位孔的配合设置,在使用的过程中能够有便捷快速的将无人机固定在停机坪的表面,使得无人机在充电的过程中更加的稳定,便于对其进行充电,通过防护罩的设置,在无人机停放充电和移转的过程中能够对无人机形成有效的防护,避免其受到损坏。
附图说明
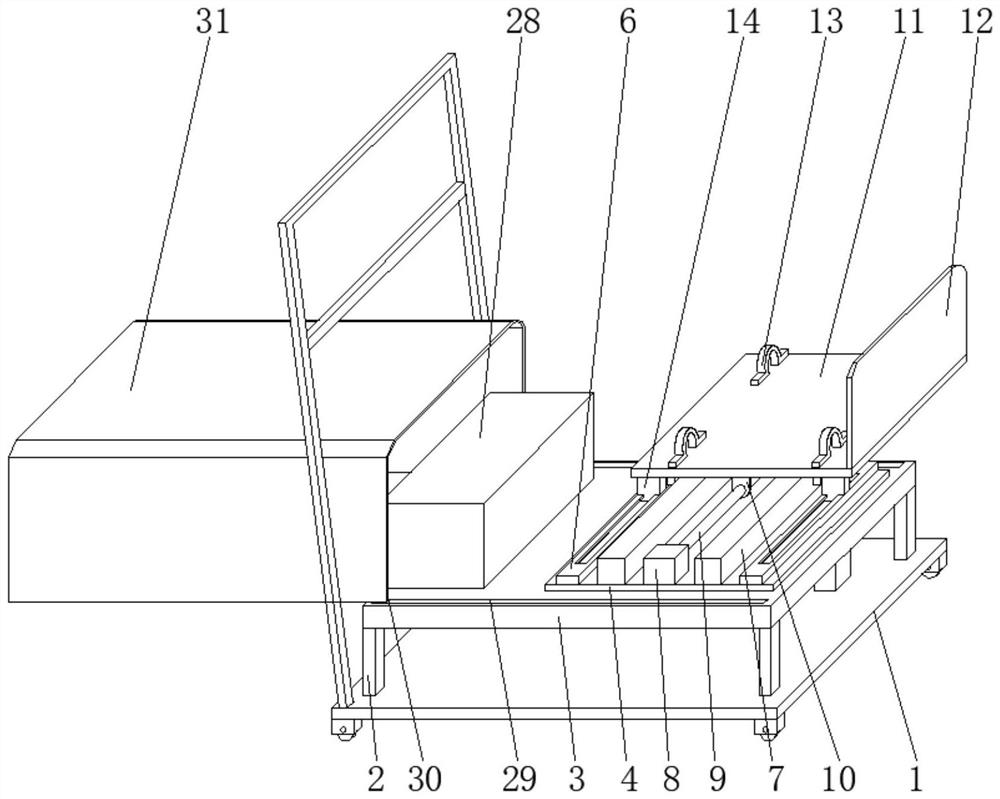
图1为本发明的整体结构示意图;
图2为本发明的正视剖视结构示意图;
图3为本发明的侧视剖视结构示意图;
图4为本发明的限位连接机构侧视剖视结构示意图。
图中:1、移动底板;2、支架杆;3、移动安装板;4、纵向移动板;5、纵向螺纹座;6、导向滑槽;7、滑动支撑块;8、横向驱动电机;9、横向驱动丝杠;10、横向螺纹座;11、停机坪;12、防护板;13、限位卡套;14、限位连接机构;1401、连接安装块;1402、接安装槽;1403、连接弹簧;1404、下压板;1405、转动推杆;1406、侧插杆;1407、上推杆;1408、连接插槽;15、悬挂安装板;16、纵向驱动丝杠;17、纵向驱动电机;18、滑动槽;19、定向滑块;20、导向滑块;21、横向复位光敏电阻;22、横向线束光源;23、复位安装块;24、纵向复位光敏电阻;25、纵向线束光源;26、连接插杆;27、限位孔;28、充电模块;29、安装滑槽;30、吸附滑块;31、防护罩。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-4,一种无人机停机坪主动抓取辅助降落装置,包括移动底板1,移动底板1的上表面固定连接有支架杆2,支架杆2的顶部固定连接有移动安装板3,移动安装板3的下表面固定连接有悬挂安装板15,悬挂安装板15的侧面转动连接有纵向驱动丝杠16,移动安装板3的下表面固定连接有纵向驱动电机17,纵向驱动丝杠16的;另一端与纵向驱动电机17的输出端传动连接,移动安装板3与纵向螺纹座5相对的位置设有滑动槽18,纵向螺纹座5的一端穿过滑动槽18螺纹连接在纵向驱动丝杠16上,移动安装板3的下表面位于纵向驱动丝杠16的两侧固定连接有复位安装块23,两个复位安装块23侧面相对应的位置分别设有纵向复位光敏电阻24和纵向线束光源25,纵向复位光敏电阻24通过导线与纵向驱动电机17电性连接,移动安装板3的上表面抵接有纵向移动板4,纵向移动板4的下表面固定连接有定向滑块19,定向滑块19的截面形状为山型,移动安装板3的下表面设有与定向滑块19相适配的导向槽,纵向移动板4的底部固定连接有纵向螺纹座5;纵向移动板4的上表面固定连接有导向滑槽6,导向滑槽6的侧面固定连接有滑动支撑块7,滑动支撑块7的数量为两个,两个滑动支撑块7侧面相对应的位置分别设有横向复位光敏电阻21和横向线束光源22,横向复位光敏电阻21通过导线与横向驱动电机8电性连接,滑动支撑块7的一侧固定连接有横向驱动电机8,横向驱动电机8的输出端传动连接有横向驱动丝杠9,横向驱动丝杠9的外表面螺纹连接有横向螺纹座10,横向螺纹座10的顶部固定连接有停机坪11,停机坪11的下表面抵接在滑动支撑块7的上表面,停机坪11的下表面位于滑动支撑块7的一侧固定连接有导向滑块20,导向滑块20的一端滑动连接在导向滑槽6内,通过纵向移动板4、停机坪11、横向驱动电机8、横向驱动丝杠9、纵向驱动电机17和纵向驱动丝杠16的配合设置,在使用的过程中能对停机坪11的位置进行调整,从而主动的对无人机的降落位置进行抓取,更加的便于无人机的停放,并且减少了停机坪11的整体面积大小,更加的易于携带;停机坪11上表面的一端固定连接有防护板12,停机坪11的上表面设有限位卡套13,停机坪11的下表面与限位卡套13相对应的位置设有限位连接机构14,限位连接机构14包括连接安装块1401,连接安装块1401的内部设有连接安装槽1402,连接安装槽1402内表面的顶部固定连接有连接弹簧1403,连接弹簧1403的另一端固定连接有下压板1404,下压板1404的两侧铰接有转动推杆1405,转动推杆1405的另一端铰接有侧插杆1406,下压板1404的下表面固定连接有上推杆1407,连接安装块1401的内部位于连接安装槽1402的两侧设有连接插槽1408,侧插杆1406的位置与限位孔27的位置相对应,限位卡套13的下表面固定连接有连接插杆26,连接插杆26的侧面设有限位孔27;移动安装板3的上表面位于纵向移动板4的一侧设有充电模块28,移动安装板3的上表面设有安装滑槽29,安装滑槽29内滑动连接有吸附滑块30,吸附滑块30的上表面固定连接有防护罩31,吸附滑块30的侧面设有吸附磁铁,通过限位卡套13、限位连接机构14、连接插杆26和限位孔27的配合设置,在使用的过程中能够有便捷快速的将无人机固定在停机坪11的表面,使得无人机在充电的过程中更加的稳定,便于对其进行充电,通过防护罩31的设置,在无人机停放充电和移转的过程中能够对无人机形成有效的防护,避免其受到损坏。
在使用时,当需抓取无人机的降落位置时,通过控制纵向驱动电机17的转动来带动纵向螺纹座5运动,从而对纵向移动板4的位置进行调节,纵向移动板4运动过程中定向滑块19能保证其运动方向的平稳性,通过控制横向驱动电机8来带动横向螺纹座10进行运动,从而带动停机坪11进行运动对其横向位置进行调节,滑动支撑块7对停机坪11起到支撑作用,导向滑槽6和导向滑块20能保证停机坪11运动的平稳性,停机坪11的横向位置和纵向位置的调节能够实现对无人机降落位置的抓取,从而便于无人机的降落,当无人降落后,使横向驱动电机8和纵向驱动电机17自行反转,带动横向螺纹座10和纵向螺纹座5复位,横向螺纹座10运动到原位置后会遮挡横向线束光源22,横向复位光敏电阻21的急剧上升变为断路状态,使得横向驱动电机8停止运转,纵向驱动电机17运动到原位置后会遮挡纵向线束光源25,纵向复位光敏电阻24的急剧上升变为断路状态,使得纵向驱动电机17停止运转,从而实现自动的复位过程,随后将限位卡套13卡在无人机的底部支架上,限位卡套13底部的连接插杆26插入连接插槽1408内,连接插杆26插入过程其底部碟机在的侧插杆1406的侧面将其向回推动,当其完全插入后,侧插杆1406插入限位孔27内,从而对无人机的位置进行固定,保证无人机在充电和移转过程中不会出现移动,最后将防护罩31拉上,对无人机进行整体的防护,无人机起飞前,向上按动上推杆1407。上推杆1407带动下压板1404上升,通过转动推杆1405将侧插杆1406抽回,此时可将限位卡套13取下,十分的便捷快速。
综上所述,该无人机停机坪主动抓取辅助降落装置,通过纵向移动板4、停机坪11、横向驱动电机8、横向驱动丝杠9、纵向驱动电机17和纵向驱动丝杠16的配合设置,在使用的过程中能对停机坪11的位置进行调整,从而主动的对无人机的降落位置进行抓取,更加的便于无人机的停放,并且减少了停机坪11的整体面积大小,更加的易于携带,通过限位卡套13、限位连接机构14、连接插杆26和限位孔27的配合设置,在使用的过程中能够有便捷快速的将无人机固定在停机坪11的表面,使得无人机在充电的过程中更加的稳定,便于对其进行充电,通过防护罩31的设置,在无人机停放充电和移转的过程中能够对无人机形成有效的防护,避免其受到损坏。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个”限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种无人机停机坪主动抓取辅助降落装置
- 一种主动追踪无人机的辅助降落装置