一种无极转动摄像头以及方法及冷轧钢带视觉检测系统
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及一种视觉检测装置以及钢带视觉检测系统,尤其涉及一种无极转动摄像头及方法及冷轧钢带视觉检测系统。
背景技术
焊缝质量是决定带钢连续轧制生产过程是否存在断带几率的要素之一,为规避焊缝缺陷的出现,国内多数钢厂投入大量资金促进改善,然而由于缺乏成熟的应用经验,改善后发挥的作用非常有限。当前,国内各大钢厂正致力于提升劳动效率,焊缝质量检测成为车间迫切之需,试点成功,可向其它产线拓展。
但是为了有效检测焊缝质量的图像拍照取样分析,遇到了摄像头空间位置受限、图像检测视野不够、摄像头拍摄角度难以微调等三大问题,这三大问题使焊缝图像检测始终存在缺陷。
发明内容
为了解决上述技术所存在的不足之处,本发明提供了一种无极转动摄像头及方法及冷轧钢带视觉检测系统。
为了解决以上技术问题,本发明采用的技术方案是:一种无极转动摄像头,包括镜头,镜头固定连接在无极转动球上,无极转动球安装于无极转动箱内且无极转动球可相对于无极转动箱转动,无极转动球可沿x轴方向顺时针及逆时针转动,无极转动箱的内部设置有无极转动球的驱动装置,驱动装置包括控向球,驱动装置驱动控向球的转动,控向球的球面与无极转动球的球面相接触且接触面之间具有摩擦形成阻力,驱动装置上固定连接有拨杆,拨杆的顶端自无极转动箱中伸出,无极转动箱的顶部开设有沿x轴方向延伸的长形开口,供拨杆在长形开口中移动,拨杆的杆身两侧均固定连接有呈弧形弯曲的导向杆,导向杆的弧度与无机转动球的球面弧度相同,导向杆对应无极转动箱的内部开设有与导向杆弧度相同的导向轨道槽,导向杆设置于导向轨道槽中,且导向杆的长度小于导向轨道槽的长度,导向杆可在导向轨道槽中移动,导向杆可保证拨杆及驱动装置的移动轨迹呈与无极转动球球面弧度相同的弧形;
导向杆的上部开设有贯穿的长孔,长孔处设置有转动连接头,转动连接头的一端通过销轴铰接在长孔中,并且可相对于转动连接头的另一端自由转动,销轴可在长孔中移动,转动连接头的另一端与螺杆固定连接,螺杆上套设有从转动轮,从转动轮与螺杆之间螺纹啮合,从转动轮通过带传动连接有主转动轮,主转动轮与电机的输出轴相固定。
进一步地,导向轨道槽的槽口处于导向杆之间固定连接有R型密封塞,R型密封塞的圆头抵在导向杆上,R型密封塞的翘腿朝向导向杆且抵在导向杆上;导向杆的端部固定连接有防脱塞和缓冲塞,防脱塞呈两端向上翘起的船型,防脱塞的两端可插置于R型密封塞的翘腿与导向轨道槽壁之间,缓冲塞呈与防脱塞相反的倒船型,防脱塞的船底与缓冲塞的船底固定连接。
进一步地,驱动装置还包括盒体以及盒盖,盒盖可固定盖在盒体上,盒盖的顶部固定连接有与拨杆相固定的拨杆连接座;控向球为三个,三个控向球均位于盒体中,盒体的底部开设有三个呈三角形排列的球槽,三个控向球分别位于三个球槽中,控向球的y轴方向轴部开设有贯穿的球轴孔,与球轴孔对应的球槽上开设有槽轴孔,球轴孔与槽轴孔之间通过花形轴连接。
进一步地,花形轴的横截面呈多瓣的花形,每瓣上设置有至少4个花瓣斜面,球轴孔的横截面形状与花形轴的横截面形状配合,使花形轴贯穿插置于球轴孔中,槽轴孔中安装有对应花形轴的降阻装置。
进一步地,降阻装置包括一固定在槽轴孔中的轨道圈以及一卡置于轨道圈中的转动块,转动块上开设有与花形轴形状配合的花形轴槽,用于连接和固定花形轴;轨道圈的内壁上设置有外钳形卡口,转动块的外壁上设置有内钳形卡口,内钳形卡口中限位设置有滚珠,滚珠的一面抵在内钳形卡口上、另一面抵在外钳形卡口上,滚珠可相对内钳形卡口自由转动,内钳形卡口限位设置于外钳形卡口中;转动块花形轴槽所在的端面与内钳形卡口之间设置有一斜面,使花形轴槽所在端面下凹,外钳形卡口的端部位于斜面处,可将内钳形卡口限位在外钳形卡口的内部。
进一步地,轨道圈的外壁上间隔固定连接有多个卡块,卡块的宽度与轨道圈的宽度相同,卡块包括一位于卡块中部的中心柱,中心柱上并列固定连接有两个横板,两个横板的端部均朝向轨道圈弯曲,槽轴孔的内壁上对应卡块开设有与卡块形状相配合的卡槽。
进一步地,螺杆上套设有轴承,轴承通过柱子固定在无极转动箱上,轴承内壁与螺杆表面具有间隙,使轴承起到支撑螺杆但不影响螺杆转动的作用。
进一步地,无极转动球以及控向球的表面均包裹橡胶涂层,以增加无极转动球与控向球之间的摩擦阻力。
一种无极转动摄像头的工作方法,方法包括以下步骤:
步骤一、开启电机使电机的输出轴开始转动,主转动轮与电机的输出轴相固定,当电机启动后,带动主转动轮与电机输出轴同步转动,主转动轮通过带传动的方式连接从转动轮,从转动轮套设且螺纹啮合连接在螺杆上,因此主转动轮转动可带动从转动轮转动,并且可以进一步带动螺杆转动,由于从转动轮的位置不变,因此螺杆在转动时,可沿x轴相对于从转动轮向前或向后移动;螺杆通过转动连接头与拨杆的长孔铰接,转动连接头的两端之间可自由转动,因此可以代偿掉螺杆的旋转,只传递螺杆推进或后退的作用力,拨杆长孔的作用是使销轴可在长孔中移动,保证拨杆的弧形运动不会受螺杆的位移所限制;
步骤二、镜头固定连接在无极转动球上,无极转动球安装于无极转动箱内且无极转动球可相对于无极转动箱转动,无极转动球可沿x轴方向顺时针及逆时针转动,从而可以调整镜头在x轴上的拍摄角度,无极转动箱的内部设置有无极转动球的驱动装置,驱动装置包括控向球,驱动装置驱动控向球的转动,控向球的球面与无极转动球的球面相接触且接触面之间具有摩擦形成阻力,当控向球逆时针转动时,无极转动球在摩擦力的作用下会顺时针转动;
步骤三、驱动装置上固定连接有拨杆,拨杆的顶端自无极转动箱中伸出,无极转动箱的顶部开设有沿x轴方向延伸的长形开口,供拨杆在长形开口中移动,拨杆的杆身两侧均固定连接有呈弧形弯曲的导向杆,导向杆的弧度与无机转动球的球面弧度相同,导向杆对应无极转动箱的内部开设有与导向杆弧度相同的导向轨道槽,导向杆设置于导向轨道槽中,且导向杆的长度小于导向轨道槽的长度,导向杆可在导向轨道槽中移动,导向杆可保证拨杆及驱动装置的移动轨迹呈与无极转动球球面弧度相同的弧形,从而使拨杆的运动轨迹与无极转动球的转动轨迹形状相同,二者不会因运动轨迹形状不同而互相牵制,因此可以实现镜头的无极转动。
一种冷轧钢带视觉检测系统,包括无极转动摄像头,摄像头固定安装在焊机的侧面,焊机通过安装移动机构成为可移动的焊机,焊机设置于冷轧钢板的正上方,摄像头的镜头对准冷轧钢板上的焊缝,冷轧钢板的放置于输送机构上,焊机、移动机构、摄像头中的电机均与控制箱电性连接。
本发明摄像头可以保持在有限空间内的无极转动,对于空间受限的视觉检测系统来说,解除了有限空间对其转动的限制,并且无极转动还可以实现对摄像头拍摄角度的微调,以确保对冷轧钢板焊缝质量检测的无遗漏性,扩大检测视野。
并且具有上述功能的摄像头可以仅使用一个电机进行控制,这是现有技术所实现不了的,相比现有技术极大的节省了电机的使用数量,从而可以降低更多的能耗,更加环保。
此外本发明整体的结构简单、紧凑,更因为只应用了一个电机,因此占用空间小,可以解决空间位置受限的问题。
附图说明
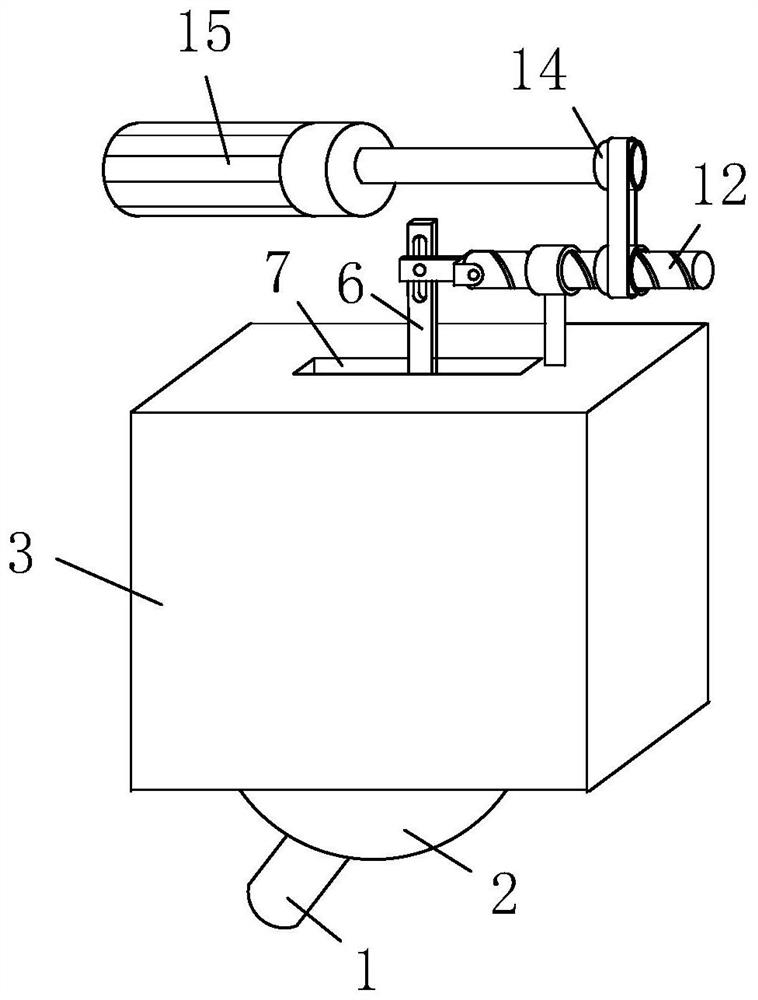
图1为无极转动摄像头的整体结构示意图。
图2为无极转动摄像头的剖面结构示意图。
图3为转动状态下的无极转动摄像头的剖面结构示意图。
图4为导向杆的端部结构示意图。
图5为驱动装置的分解结构图。
图6为花形轴的结构示意图。
图7为降阻装置的分解结构图。
图8为图7中A处的结构放大图。
图9为降阻装置的剖面结构示意图。
图10为冷轧钢带视觉检测系统的整体结构示意图。
图中:1、镜头;2、无极转动球;3、无极转动箱;4、驱动装置;5、控向球;6、拨杆;7、长形开口;8、导向杆;9、导向轨道槽;10、长孔;11、转动连接头;12、螺杆;13、从转动轮;14、主转动轮;15、电机;16、R型密封塞;17、翘腿;18、防脱塞;19、缓冲塞;20、盒体;21、盒盖;22、拨杆连接座;23、球槽;24、球轴孔;25、槽轴孔;26、花形轴;27、轨道圈;28、转动块;29、花形轴槽;30、外钳形卡口;31、内钳形卡口;32、滚珠;33、斜面;34、卡块;35、中心柱;36、横板;37、轴承;38、焊机;39、移动机构;40、冷轧钢板;41、焊缝;42、输送机构。
具体实施方式
下面结合附图和具体实施方式对本发明作进一步详细的说明。
本发明中所指x轴方向为图纸中的左右方向,y轴方向为图纸中的上下方向。
如图1和图2所示的无极转动摄像头,包括镜头1,镜头固定连接在无极转动球2的底端,无极转动球安装于无极转动箱3内,无极转动箱的下端设置开口,使无极转动球的部分暴露在无极转动箱的外部,并且在该外部安装镜头。无极转动球可相对于无极转动箱转动,如图所示,无极转动箱的的底端超过无极转动球的中轴向下延伸,且无极转动箱的开口口径小于无极转动球的直径,因此可以保证无极转动球无法掉落下来。并且在无极转动箱的底部开口两侧也可以安装暗滚轮,使无极转动球的转动不受无极转动箱的摩擦影响。
无极转动球可沿x轴方向顺时针及逆时针转动,即以图1以及图2中视角下的顺时针及逆时针转动。无极转动箱的内部设置有无极转动球的驱动装置4,驱动装置用于驱动无极转动球转动。
驱动装置包括控向球5,驱动装置驱动控向球的转动,控向球的球面与无极转动球的球面相接触且接触面之间具有摩擦形成阻力,无极转动球以及控向球的表面均包裹橡胶涂层,以增加无极转动球与控向球之间的摩擦阻力。
驱动装置上固定连接有拨杆6,拨杆的顶端自无极转动箱中伸出,无极转动箱的顶部开设有沿x轴方向延伸的长形开口7,供拨杆在长形开口中移动,拨杆的杆身两侧均固定连接有呈弧形弯曲的导向杆8,导向杆的弧度与无机转动球的球面弧度相同,导向杆对应无极转动箱的内部开设有与导向杆弧度相同的导向轨道槽9,导向杆设置于导向轨道槽中,且导向杆的长度小于导向轨道槽的长度,导向杆可在导向轨道槽中移动,导向杆可保证拨杆及驱动装置的移动轨迹呈与无极转动球球面弧度相同的弧形;如图3所示。
导向杆的上部开设有贯穿的长孔10,长孔处设置有转动连接头11,转动连接头的一端通过销轴铰接在长孔中,并且可相对于转动连接头的另一端自由转动,销轴可在长孔中移动,转动连接头的另一端与螺杆12固定连接,螺杆上套设有从转动轮13,从转动轮与螺杆之间螺纹啮合,从转动轮通过带传动连接有主转动轮14,主转动轮与电机15的输出轴相固定。螺杆12上套设有轴承37,轴承通过柱子固定在无极转动箱上,轴承内壁与螺杆表面具有间隙,使轴承起到支撑螺杆但不影响螺杆转动的作用。
应用于冷轧钢带视觉检测系统中时,由于冷轧钢带在输送机构如传送带的传送作用下,冷轧钢带本身具有z轴方向(穿透图纸方向)的运动状态,因此在检测焊缝时,仅需要考虑到镜头的x轴位移即可将焊缝都检测到。因此本发明中无极转动球的转动也仅需要考虑到x轴方向的无极转动。基于此,本发明驱动装置中控向球的运动方向也仅需要实现x轴方向的无极转动即可。
具体地,如图5所示,驱动装置还包括盒体20以及盒盖21,盒盖可固定盖在盒体上,盒盖的顶部固定连接有与拨杆相固定的拨杆连接座22;控向球为三个,三个控向球均位于盒体中,盒体的底部开设有三个呈三角形排列的球槽23,三个控向球分别位于三个球槽中,使三个控向球也呈三角形排列,由此可增加控向球与无极转动球之间的接触面积,使利用摩擦驱动无极转动球转动的效果更好。控向球的y轴方向轴部开设有贯穿的球轴孔24,与球轴孔对应的球槽上开设有槽轴孔25,球轴孔与槽轴孔之间通过花形轴26连接。通过花形轴的位置限制,使控向球只能沿x轴方向转动,而不能在其他方向上转动。
花形轴26的横截面呈多瓣的花形,每瓣上设置有至少4个花瓣斜面,如图6所示,本实施例中具有7个花瓣,每瓣花瓣具有4个斜面,球轴孔的横截面形状与花形轴的横截面形状配合,使花形轴贯穿插置于球轴孔中,花形轴的作用是增加轴与球轴孔之间的接触面积,且斜面与斜面之间的角度锐利,可增强花形轴与球轴孔之间的稳定性,二者不易打滑,即可实现花形轴带动下控向球的无极转动。
相对应地,槽轴孔25中安装有对应花形轴的降阻装置。如图7所示,降阻装置包括一固定在槽轴孔中的轨道圈27以及一卡置于轨道圈中的转动块28,转动块上开设有与花形轴形状配合的花形轴槽29,用于连接和固定花形轴。
如图9所示,轨道圈的内壁上设置有外钳形卡口30,转动块的外壁上设置有内钳形卡口31,内钳形卡口中限位设置有滚珠32,滚珠的一面抵在内钳形卡口上、另一面抵在外钳形卡口上,形成如图9所示的内钳形卡口端部与外钳形卡口内壁之间具有空隙,二者仅通过滚珠连接,滚珠可相对内钳形卡口自由转动,通过滚珠的转动,可以实现转动块相对于轨道圈自由转动,且转动的阻力非常小。
内钳形卡口限位设置于外钳形卡口中;转动块花形轴槽所在的端面与内钳形卡口之间设置有一斜面33,使花形轴槽所在端面下凹,外钳形卡口的端部位于斜面处,可将内钳形卡口限位在外钳形卡口的内部,使内钳形卡口不会从外钳形卡口中脱出。
如图7和图8所示,轨道圈27的外壁上间隔固定连接有多个卡块34,卡块的宽度与轨道圈的宽度相同,卡块包括一位于卡块中部的中心柱35,中心柱上并列固定连接有两个横板36,两个横板的端部均朝向轨道圈弯曲,槽轴孔的内壁上对应卡块开设有与卡块形状相配合的卡槽。卡块的作用是将轨道圈固定在槽轴孔中,并且卡块的形状有助于增强轨道圈与槽轴孔之间的稳固性,因而使轨道圈与转动块之间降阻转动,进一步促进控向球的无极转动。
导向轨道槽9的槽口处于导向杆之间固定连接有R型密封塞16,R型密封塞的内部为硬质材料如金属或硬质塑料,外表包裹如橡胶的软质材料。R型密封塞的圆头抵在导向杆上对导向杆起到支撑和密封作用,支撑作用是支撑导向杆在导向轨道槽中的位置,不会倾斜导致剐蹭导向轨道槽的内壁。
R型密封塞的翘腿17朝向导向杆且抵在导向杆上,翘腿也可以实现支撑的作用;导向杆的端部固定连接有防脱塞18和缓冲塞19,防脱塞呈两端向上翘起的船型,防脱塞的两端可插置于R型密封塞的翘腿与导向轨道槽壁之间,从而对导向杆起到限位的作用,本发明中可以设置两种限位措施,一为防脱塞,二可以限定长形开口的长度,使拨杆无法转动到可以使导向杆脱出的角度。
其中,为了保证在极限状态下可能引起的导向杆从导向轨道槽中脱出情况,设置了防脱塞。缓冲塞呈与防脱塞相反的倒船型,防脱塞的船底与缓冲塞的船底固定连接。缓冲塞具有如图4所示上凹的形状,当在极限状态下,导向杆的端部移动到导向轨道槽的底部时,缓冲塞的形状可具有缓冲的作用,防止导向杆的端部受损。
无极转动摄像头的工作方法,包括以下步骤:
步骤一、开启电机15使电机的输出轴开始转动,主转动轮14与电机15的输出轴相固定,当电机启动后,带动主转动轮与电机输出轴同步转动,主转动轮通过带传动的方式连接从转动轮13,从转动轮套设且螺纹啮合连接在螺杆12上,因此主转动轮转动可带动从转动轮转动,并且可以进一步带动螺杆转动,由于从转动轮的位置不变,因此螺杆在转动时,可沿x轴相对于从转动轮向前或向后移动;螺杆通过转动连接头11与拨杆6的长孔10铰接,转动连接头的两端之间可自由转动,因此可以代偿掉螺杆的旋转,只传递螺杆推进或后退的作用力,拨杆长孔的作用是使销轴可在长孔中移动,保证拨杆的弧形运动不会受螺杆的位移所限制;
步骤二、镜头1固定连接在无极转动球2上,无极转动球安装于无极转动箱内且无极转动球可相对于无极转动箱转动,无极转动球可沿x轴方向顺时针及逆时针转动,从而可以调整镜头在x轴上的拍摄角度,无极转动箱的内部设置有无极转动球的驱动装置4,驱动装置包括控向球5,驱动装置驱动控向球的转动,控向球的球面与无极转动球的球面相接触且接触面之间具有摩擦形成阻力,当控向球逆时针转动时,无极转动球在摩擦力的作用下会顺时针转动;
步骤三、驱动装置上固定连接有拨杆6,拨杆的顶端自无极转动箱中伸出,无极转动箱的顶部开设有沿x轴方向延伸的长形开口7,供拨杆在长形开口中移动,拨杆的杆身两侧均固定连接有呈弧形弯曲的导向杆8,导向杆的弧度与无机转动球的球面弧度相同,导向杆对应无极转动箱的内部开设有与导向杆弧度相同的导向轨道槽9,导向杆设置于导向轨道槽中,且导向杆的长度小于导向轨道槽的长度,导向杆可在导向轨道槽中移动,导向杆可保证拨杆及驱动装置的移动轨迹呈与无极转动球球面弧度相同的弧形,从而使拨杆的运动轨迹与无极转动球的转动轨迹形状相同,二者不会因运动轨迹形状不同而互相牵制,因此可以实现镜头的无极转动。
如图10所示,图中虚线框表示现有技术中的障碍物,现有技术中障碍物使摄像头的位置空间受限。一种冷轧钢带视觉检测系统,包括如前述的无极转动摄像头,摄像头固定安装在焊机38的侧面,焊机通过安装移动机构39成为可移动的焊机,焊机设置于冷轧钢板40的正上方,摄像头的镜头对准冷轧钢板上的焊缝41,冷轧钢板放置于输送机构42上,焊机、移动机构、摄像头中的电机15均与控制箱电性连接。
使用时,输送机构如传送带带动冷轧钢板移动,在移动的过程中焊机进行焊接,焊接后的焊缝通过前述的摄像头进行拍摄,可对焊缝的质量进行检测。同时,发现焊缝有歪斜的状况出现时,控制箱可控制移动机构对焊机的位置进行调整,使焊缝归位。并且也可以控制摄像头的电机使摄像头无极转动,对于偏斜的焊缝摄像头也可以自动转动任意角度以调整视野。
上述实施方式并非是对本发明的限制,本发明也并不仅限于上述举例,本技术领域的技术人员在本发明的技术方案范围内所做出的变化、改型、添加或替换,也均属于本发明的保护范围。
- 一种无极转动摄像头以及方法及冷轧钢带视觉检测系统
- 一种无极转动摄像头以及方法及冷轧钢带视觉检测系统