一种基于多模块应用的AGV导引系统及应用系统的AGV小车
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及技术领域,具体为一种基于多模块应用的AGV导引系统及应用系统的AGV小车。
背景技术
目前,AGV小车作为一种轮式移动机器人,装备有电磁或光学等自动引导装置,能够沿规定路径自动运行,广泛应用于搬运系统中。AGV小车为智能化程度高,全程自动运行,需运输的物体放在AGV小车上,随着经济发展,人们的生活水平在不断的提高,人们对纺织品面料的要求在不断的提高,无论从织物手感还是织物花色都将是提升面料等级的最佳方式,但由于织物在织造结构、纤维结构和生产工艺中不可避免的的产生纤维表面毛絮损伤及机械摩擦和外界静电、空气灰尘等因素产生细微杂质粘附在织物表面和车间地面。现有技术中,许多企业为解决此类现象,只是单纯人工用胶带或刷毛辊对车间地面进行清洗,没有合理的集中收集毛絮等杂物,还有一些企业使用的是手持工业吸尘箱进行处理,但这种吸尘箱需要人工手持操作,消耗了人力成本,同时也降低了生产效率,不易拆卸清洗或更换部件。
发明内容
本发明的目的在于提供一种基于多模块应用的AGV导引系统及应用系统的AGV小车,以解决上述背景技术中提出的问题。
为实现上述目的,本发明提供如下技术方案:一种基于多模块应用的AGV导引系统的AGV小车,包括车体总成、启动控制键和收纳总成,所述启动控制键设置在车体总成的外侧,所述车体总成正面的左下角位置设置有启动控制键,所述收纳总成设置在车体总成的顶部。
优选的,所述所述车体总成包括车体、移动轮、吸尘总成、显示器、红外光电传感器、防撞停止器、出风口、升降气缸、过滤器总成、驱动中央控制总成、散热器总成、进风口、气泵、磁导航传感器和扬声器,所述车体是车体总成的主体,且采用框架式结构设置,所述移动轮等距离的设置在车体的底部,所述吸尘总成设置在车体的底部,所述车体的侧面设置有显示器,所述红外光电传感器等距离的设置在车体正面的右上角的位置,所述车体外侧靠近底部的位置设置有防撞停止器,所述出风口等距离的开设在车体的外侧,所述车体的内腔等距离设置有升降气缸,所述过滤器总成等距离的设置在车体内腔靠近中心的位置,所述车体内腔的中心位置设置有驱动中央控制总成,所述散热器设置在车体靠近中心的一侧,所述车体内腔的底部等距离的开设有进风口,所述气泵设置在驱动中央控制总成的外侧,且设置在车体内腔的左侧位置,所述车体的底部设置有磁导航传感器,所述磁导航传感器的外侧设置有扬声器,且设置在车体底部远离中心的位置。
优选的,所述收纳总成包括箱体、顶腔盖、倾倒铰链和倾倒门体,所述箱体是收纳总成的主体,采用可拆卸式结构设置,所述顶腔盖设置在箱体的顶部,所述箱体的外侧设置有倾倒铰链,且对称型左右分布设置,所述倾倒铰链的下端设置有倾倒门体,且设置在箱体的外侧。
优选的,所述吸尘总成包括吸尘体和辊闸体,所述吸尘体是吸尘体总成的主体,所述辊闸体设置在吸尘体的内腔中,所述吸尘体是一种可方便拆卸和置换的框架体,所述辊闸体是一种可清理地面杂质和粉尘及垃圾的旋转清理工具,且可根据不同需求进行置换载具。
优选的,所述过滤器总成包括过滤器和过滤网,所述过滤器是过滤器总成的主体,所述过滤网设置在过滤器的外侧,所述过滤器是一种可自动过滤粉尘及杂质的仪器,所述过滤网是一种方便拆卸清理和置换的防尘过滤过滤网,且可根据不同环境需求进行置换过滤网的间距大小。
优选的,所述驱动中央控制总成包括驱动电机和中央控制模块组,所述驱动电机设置在驱动中央控制总成的外侧,所述中央控制模块组设置在驱动电机的外侧,所述中央控制模块组包括移动行驶模块、避让识别模块、语音模块、自动升降模块、磁导航指示模块、吸尘模块、散热模块和自动充电模块。
优选的,所述驱动中央控制总成是一种即移动轮进行移动的驱动电机控制器,且也是控制整体车体完成各项功能的模块控制器,可以控制车体按照预先设置的路线自动行驶等。
优选的,所述散热器是一种工作时噪音非常的小的电机和风扇组成,所述红外光电传感器是一种通过红外光电感应的仪器,且可通过感应来自动避让工作人员或者是障碍物,在车体移动时检测到前面有物体时会自动停止运行移动,所述红外光电传感器设置在车体左、右两侧,实现了前后都能自动感应的效果,且扩大的检测范围,所述防撞停止器是一种具有防撞及缓冲的框架体,且主要是车体在自动运行时,检测到周围环境有障碍物和静止的物体时,可进行缓冲和自动停止的感应器,所述磁导航传感器114是一种利用集磁道钉的磁场特性研究磁信号检测、车辆与磁道钉之间相对运动于一体的传感器。
优选的,所述移动轮是一种经过特殊处理具有防静电及防粉尘的材料制作而成,移动时没有产生移动的痕迹和工作噪音。
优选的,所述收纳总成的底部设置在升降气缸的顶部,且采用可方便拆卸清理的卡扣式设计。
优选的,所述的一种基于多模块应用的AGV导引系统,所述AGV导引系统包括动力系统、驱动系统、行驶系统、操作系统、安全感应系统、地标感应系统和自动充电系统。
与现有技术相比,本发明的有益效果是:
1、该AGV小车,通过吸尘总成与移动轮之间的配合,达到了可自动移动式清理吸尘的效果,解决了以往还需人工手持进行清理的问题。
2、该AGV小车,通过吸尘体和辊闸体之间的配合,达到了可方便拆卸清洗清理又可根据不同环境需求进行置换载具的功能,解决了以往不方便拆卸也不能根据环境需求进行置换载具的问题。
3、该AGV小车,通过防撞停止器与红外光电传感器之间的配合,达到了在自动运行时可检测自动停止及避让停止的功能,解决了以往人工手持吸尘箱不能达到了效果。
4、该AGV小车,通过驱动中央控制总成与散热器之间的配合,达到了可自动运行及控制静音风扇功率风量的效果,解决了在提高吸尘工作效率的问题。
5、该AGV小车,通过升降气缸与倾倒门体之间的配合,达到了无需人工搬运即可实现自动倾倒物体或者垃圾的使用效果,解决了以往运输到指定区域后还需人工搬运的问题。
6、该AGV小车,通过移动轮与自动充电模块之间的配合,达到了电量不足时可自动去充电的效果,解决了以往AGV小车电量不足即停止工作,不同连续重复使用的问题。
7、该AGV小车,通过过滤器与过滤网之间的配合,达到了可自动将大颗粒或杂质物体直接过滤及该部件可方便拆卸清理清洗或更换的功能,解决了以往不方便拆卸清理清洗和无法置换的问题。
8、该AGV小车,通过升降气缸与卡扣式结构设置之间的配合,达到了可根据不同需求进行拆卸装置具的效果,满足不同使用需求,解决了以往的AGV小车只能作为运输装载工具的功能单一性问题。
9、该AGV小车,不仅可以吸尘,而且还能自动倾倒清理垃圾及自动卸载物体和更换装置具的多功能性了自动化行驶吸尘的效果,节省了人力成本,对于生产效率也有显著的提升。
附图说明
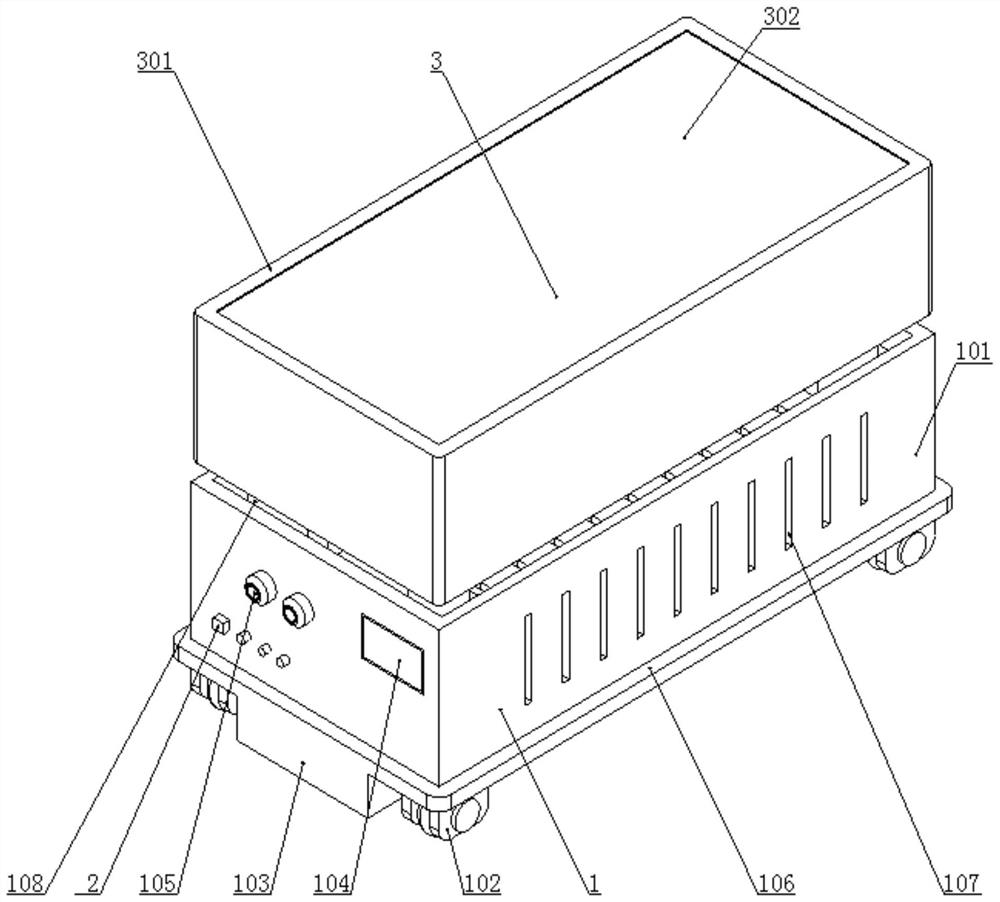
图1为本发明结构示意图;
图2为本发明结构侧视图;
图3为本发明结构主视图;
图4为本发明结构底部视图;
图5为本发明车体总成结构系统俯视图;
图6为本发明结构示意图侧视图。
图中:1车体总成、101车体、102移动轮、103吸尘总成、1031吸尘体、1032辊闸体、104显示器、105红外光电传感器、106防撞停止器、107出风口、108升降气缸、109过滤器总成、1091过滤器、1092过滤网、110驱动中央控制总成、111散热器、112进风口、113气泵、114磁导航传感器、115扬声器、2启动控制键、3收纳总成、301箱体、302顶腔盖、303倾倒铰链、304倾倒门体。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-6,本发明提供一种技术方案:
工作原理:该AGV小车是一种方便清理及可拆卸置换的搭配装载搬运框架的多模块应用,结构设计紧凑,方便安装及拆卸置换及维护,首先是安装过程,一种基于多模块应用的AGV导引系统的AGV小车,包括车体总成1、启动控制键2和收纳总成3,启动控制键2设置在车体总成1的外侧,车体总成1正面的左下角位置设置有启动控制键2,收纳总成3设置在车体总成1的顶部,安装完毕后方可进入使用调试过程,通电后先检查各部件是否安装到位,自动行驶数据是否设置完成,最后是使用过程使用方法一:该AGV小车通电后,根据显示器104上所显示的数据进行自动校队,并按动启动控制键2,开始自动运行,该AGV小车按照预先设置的路线进行移动,此时驱动中央控制总成110发生指令通过电线连接带动移动轮2进行移动,吸尘总成103也随即进行旋转式运动,同时散热器111也跟随一起转动,当路面上有垃圾或杂质时,辊闸体1032可将路面上的垃圾通过旋转带入到进风口112中,并顺着进风口112顶部的管道导致到过滤器总成109处进行过滤,将大颗粒的杂质或垃圾过滤到后,再吸入吸尘车体101顶部的收纳总成3中,此时吸尘工作即为完成;使用方法二:需要清理时无需人工搬运清理,到达需要清理的区域后,此时升降气缸108开始往上提升并带动收纳总成3一起运动,通过一边提升一边不动的倾倒并通过倾倒门体304与倾倒铰链303之间的配合,再重力的作用下,所需清理的物体将会自动倒出,此时该AGV小车完成自动清理;使用方法三:可根据不同需求进行更换车体101顶部的装载工具,例如搭载搬运框架,车体101顶部连接处采用卡扣结构式设置,方便松掉即可拆除进行置换;使用方法四:需要清理过滤器总成109中的过滤网1092时,直接将过滤器总成109卡扣开关松开即可拆卸下来进行过滤网1092的清理;使用方法五:该AGV小车顶部的设置的收纳总成3采用储物箱结构设置,可不同需求进行使用,若作为储物箱时可通过箱体301顶部设置的顶腔盖302打开并放入所需运输的物体,当该AGV小车移动到指定区域后,和使用方法二一样,采用一高一低重力的作用,可自动卸载搬运的物体,从而实现了无需人工搬运的便捷与方便的效果;使用方法六:该AGV小车出现电量不足时,驱动中央控制总成110会自动启动自动充电模块,并通过显示器104显示电量不足,移动轮102带动该AGV小车自动行驶到附近最近的充电站进行充电,待充电完成后即可继续工作;驱动中央控制总成110是一种即移动轮2进行移动的驱动电机控制器,且也是控制整体车体完成各项功能的模块控制器,可以控制车体101按照预先设置的路线自动行驶等,中央控制模块组包括移动行驶模块、避让识别模块、语音模块、自动升降模块、磁导航指示模块、吸尘模块和散热模块,从而实现控制不同的功能性操作,AGV导引系统包括动力系统、驱动系统、行驶系统、操作系统、安全感应系统、地标感应系统和自动充电系统,散热器111是一种工作时噪音非常的小的电机和风扇组成,红外光电传感器105是一种通过红外光电感应的仪器,且可通过感应来自动避让工作人员或者是障碍物,在车体101移动时检测到前面有物体时会自动停止运行移动,红外光电传感器105设置在车体101左、右两侧,实现了前后都能自动感应的效果,且扩大的检测范围,防撞停止器106是一种具有防撞及缓冲的框架体,且主要是车体101在自动运行时,检测到周围环境有障碍物和静止的物体时,可进行缓冲和自动停止的感应器,磁导航传感器114是一种利用集磁道钉的磁场特性研究磁信号检测、车辆与磁道钉之间相对运动于一体的传感器,移动轮2是一种经过特殊处理具有防静电及防粉尘的材料制作而成,移动时没有产生移动的痕迹和工作噪音,收纳总成3是一种方便拆卸或置换的回收垃圾、粉尘、杂质的储物箱,该储物箱也可以用来装载所需运输的物体,可根据不同需求进行使用,收纳总成3的内腔中还设置有回收垃圾储物袋,且当快要回收满的时候可直接自动倾倒至于指定的工业垃圾区域即可,从而不会造成环境的污染,收纳总成3的顶部还设置有警示灯,在移动时可播放预先设置好的音乐来告诉工人人员该AGV小车正在工作中,该AGV小车不仅可以吸尘,而且还能自动倾倒清理垃圾及自动卸载物体和更换装置具的多功能性,不仅节约了人力成本,而且还提高了生产效率,实现了方便清理及自动化运行的效果,实用性更高。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种基于多模块应用的AGV导引系统及应用系统的AGV小车
- 一种AGV小车线性霍尔导引装置及其导引方法