一种激光测距振镜成像系统及方法
文献发布时间:2023-06-19 11:32:36
技术领域
本发明涉及测距成像技术领域,特别是涉及一种激光测距振镜成像系统及方法。
背景技术
激光测距成像对待测目标扫描时,利用了激光测距的原理获得相应的距离信息。激光测距是一种利用激光测量激光源与待测物体之间距离的方法,一般采用两种方式:脉冲法和相位法,相位法通过测量调制在激光上信息的相位变化来获得距离信息,脉冲法则是通过测量发射和接收激光之间的时间间隔T,在已知光速c的情况下通过
获取待测目标三维信息的扫描方式,通常包含点扫描、线扫描和面扫描三大类,三类方法的扫描速度和成本均依次增大。线扫描和面扫描有很高的扫描速度,但较高的成本也限制了相应的应用;点扫描的成本较低但却有扫描速度较慢的问题,在一些实时性要求较高的场合难以应用。现有的点扫描方式有云台式激光测距:通过云台转动激光源改变激光发射方向,但这种方法有明显的缺点:云台成本高、体积大造成最终的产品成本偏高;激光源的重量不可忽略,云台负重较大的情况下,转动的速度有明显降低,进一步降低了点扫描的扫描速度。
因此,在激光测距成像方面,为了以较低成本、较高的扫描速度获得分辨率较高的图像,需要对现有的扫描方案进一步改进。
发明内容
针对上述问题,本发明提供了一种激光测距振镜成像系统及方法,不仅成本低、成像速度快,而且可获得较高分辨率和精度的图像。
为实现上述发明目的,本发明系统所采用的技术方案为:
一种激光测距振镜成像系统,包括激光传感器、振镜、控制系统和显示系统,其特征在于,激光传感器发射激光照射至振镜,振镜改变激光的出射方向,然后照射在待测物体的表面并沿入射光路反射;激光传感器接收待测物体表面反射的激光后,通过测量发射和接收激光之间的时间间隔得到相应位置的距离信息;控制系统分别与激光传感器、振镜以及显示系统连接;所述控制系统接收激光传感器测得的距离信息后,修正由振镜改变激光方向导致测量距离具有的偏差,然后将修正后的距离信息送至所述显示系统。
进一步地,所述激光传感器为激光测距传感器。
进一步地,所述振镜包括Y轴舵机、X轴舵机、Y轴反射镜和X轴反射镜,Y轴反射镜和X轴反射镜分别设置在Y轴舵机和X轴舵机上;发射的激光先照射至Y轴反射镜上,被反射后照射至X轴反射镜,经X轴反射镜反射后照射在待测物体的表面。
进一步地,所述显示系统为电脑或独立显示屏,其与控制系统的通信方式包括串口通信和蓝牙通信。
本发明一种激光测距振镜成像方法,该方法的步骤包括:
(1)利用激光传感器发射激光照射至振镜;
(2)振镜按设定的频率改变激光的出射方向;
(3)激光沿设定的扫描路径扫描,遇待测物体反射,并沿原路返回至激光传感器;
(4)激光传感器根据发射激光和接收到的反射激光的时间,通过
(5)控制系统将修正后的距离信息送至显示系统,显示系统显示成像结果。
进一步地,所述步骤(2)中,振镜通过两次反射分别在y方向和x方向改变激光的方向;激光传感器每测量一次距离,振镜通过转动改变一次方向,实现激光传感器的二维平面点扫描。
进一步地,所述步骤(3)中,扫描路径包括S形扫描、环形扫描或者对角扫描。
进一步地,所述步骤(4)中,修正的距离误差为非线性修正,是通过振镜反射的激光路径与该扫描位置距成像系统的实际距离之间的几何关系计算得出。
进一步地,所述步骤(5)中,显示系统先利用x方向和y方向坐标确定每一像素点的位置,之后将该位置的深度信息归一化处理为符合RGB格式的数据,再填充进任一RGB颜色通道中,利用颜色深浅表示距离信息的大小,从而显示出二维立体图成像。
进一步地,所述步骤(5)中,控制系统通过对步骤(4)修正后的相邻行列的距离数值进行插值计算,得到相邻两次测量之间未测量到的部分的距离近似值,然后送至显示系统。
与现有技术相比,本发明的有益效果包括:
(1)本发明的系统结构简单直观易于加工生产,原理清楚易懂便于使用。通过采用点扫描方式,不需要较高纯度的光学镜片调制激光,降低了成本。同时通过振镜改变激光扫描方向,提高了点扫描的成像速度和精度。
(2)本发明的方法可通过改变设置的扫描路径来提高分辨率,比如可以通过对角扫描,使振镜中两片反射镜每次改变均以最小步进改变,在每一步进的开始、中间、最后三个位置均测量一次,可实现将行列分辨率均提升为原先的两倍。
附图说明
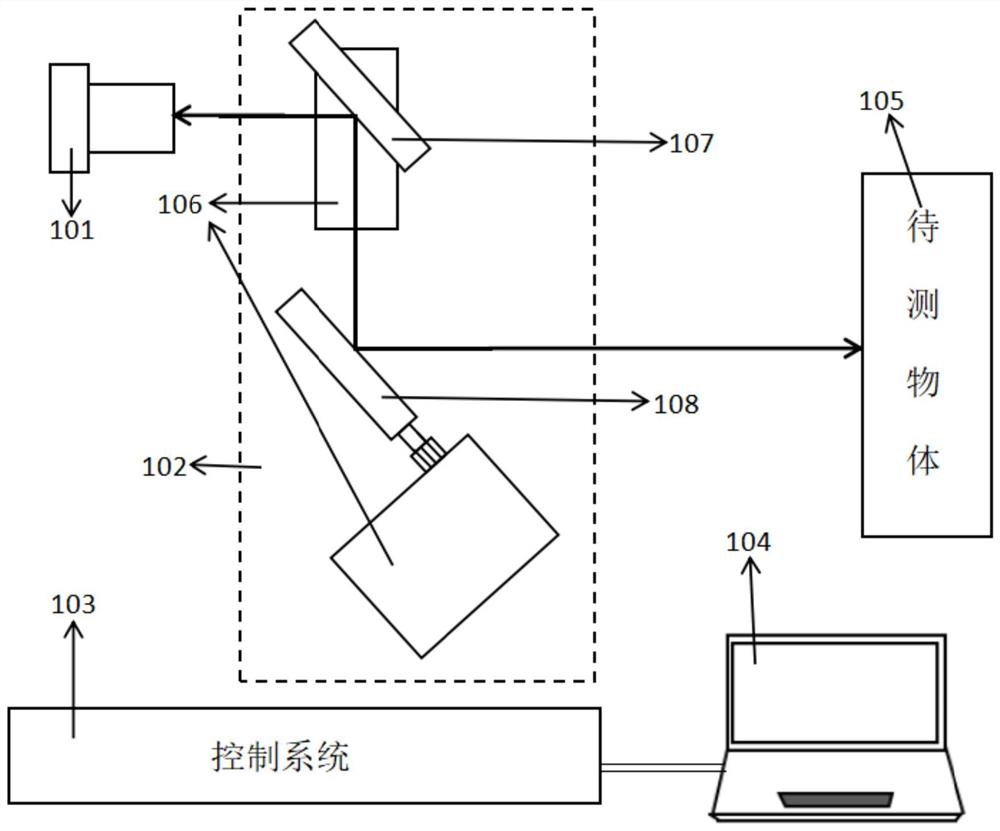
图1为本发明实施例中激光测距振镜成像系统的结构示意图;
图2为本发明实施例中测量距离误差非线性补偿示意图。
图中:101-激光传感器、102-振镜、103-控制系统、104-显示系统、105-待测物体、106-Y轴舵机和X轴舵机、107-Y轴反射镜、108-X轴反射镜、201-激光测距振镜成像系统、202-实际距离、203-测量距离。
具体实施方式
下面结合附图对本发明进一步说明。
本实施例的一种激光测距振镜成像系统,具体包括激光传感器101、振镜102、控制系统103和显示系统104。控制系统103与激光传感器101、振镜102以及显示系统104连接,控制振镜102的转动以及激光测距传感器101的测量。在工作时激光传感器101发射激光照射至振镜102改变出射方向,按设定路径扫描待测物体105的表面并沿入射光路反射,激光传感器101接收到反射激光,通过测量发射光和反射激光之间的时间间隔T,在已知光速c的情况下通过
其中,激光传感器101为激光测距传感器,包括激光的发送器和接收器。振镜102包括Y轴舵机和X轴舵机106、Y轴反射镜107和X轴反射镜108,Y轴舵机和X轴舵机106分别沿y方向和x方向转动Y轴反射镜107和X轴反射镜108。激光从激光传感器101中发射后,照射至Y轴反射镜107使激光方向在y方向改变,反射后照射至X轴反射镜108使激光方向在x方向改变,每测量一次距离,振镜102的反射镜107和108就改变一次激光出射方向,实现激光测距传感器的二维平面点扫描,得到的信息有包含扫描位置的xy二维平面信息以及每一扫描位置的深度信息,其中xy二维平面信息是指每一扫描位置的激光路径测量距离203相对于实际距离202对应位置的参数α
在扫描的过程中,由于振镜102改变激光方向导致测量结果具有偏差,如图2所示。因此需要对所得到的所有位置的深度信息做一非线性补偿,即:
其中s为每一测量位置未经修正的距离信息,d为每一测量位置与激光测距振镜成像系统之间的实际距离,α
扫描方式的路径包括S形扫描、环形扫描或者对角扫描等。测量得到的有效距离信息为本系统成像的分辨率。其中,S形扫描为逐行扫描或逐列扫描,本实施例中具体为反射镜108从左到右扫描一遍后反射镜107等间隔步进一次,或反射镜107从上到下扫描一遍后反射镜108等间隔步进一次。环形扫描为以中心位置为圆点沿多组半径不等的同心圆扫描,本实施例中具体为反射镜107和反射镜108角度分别以正弦函数和余弦函数规律变化,反射镜变化角度绝对值的最大值随同心圆扫描次数线性变化。对角扫描为沿一组等间距的45°或135°倾斜线扫描,本实施例中具体为反射镜107和反射镜108每次变化相同步进,初始角度的相位差随斜线扫描次数线性变化。S形扫描和对角扫描通常成像为矩形图像,环形扫描通常成像为圆形图像。在需要高分辨率的场合,可以通过改变扫描路径实现分辨率的提高,比如,可以通过对角扫描,使振镜中两片反射镜每次改变均以最小步进改变,在每一步进的开始、中间、最后三个位置均测量一次,可实现将行列分辨率均提升为原先的两倍。除此之外,还可以以较一般的分辨率扫描大范围,至扫描检测到设定好判断条件的异常处,转为分辨率更高的扫描路径,从而在图像刷新频率和图像分辨率之间得到合理平衡。
对上述三种扫描方式,均可通过插值计算的方法进一步提高图像的分辨率,具体实现方法为:对相邻测量点所得距离数据两两进行插值计算,一般为计算两数据的均值。所得结果作为两测量点之间未测量到部分的距离信息,填充进所成图像中,从而将分辨率提升为原先的两倍。
- 一种激光测距振镜成像系统及方法
- 基于激光振镜的太赫兹单像素成像系统及成像方法