一种具有分布式采集装置的机器人教育诱导系统
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及机器人技术领域,具体为一种具有分布式采集装置的机器人教育诱导系统。
背景技术
机器人是一种能够半自主或全自主工作的智能机器,所不同的是这种机器具备一些与人或生物相似的智能能力,如感知能力、规划能力、动作能力和协同能力,是一种具有高度灵活性的自动化机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围,随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透,结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人,它既可以接受人类指挥,又可以运行预先编排的程序,也可以根据以人工智能技术制定的原则纲领行动,它是高级整合控制论、机械电子、计算机、材料和仿生学的产物,在工业、医学、农业、服务业、建筑业甚至军事等领域中均有重要用途。
目前在儿童教育行业,对机器人的应用越来越广泛,但现有的机器人诱导系统一般为通用型,无法根据不同儿童的特征进行教育诱导,不具有较强的针对性与专业特色,从而使得学习效果较差。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种具有分布式采集装置的机器人教育诱导系统,解决了现有的机器人诱导系统一般为通用型,无法根据不同儿童的特征进行教育诱导,不具有较强的针对性与专业特色,从而使得学习效果较差的问题。
(二)技术方案
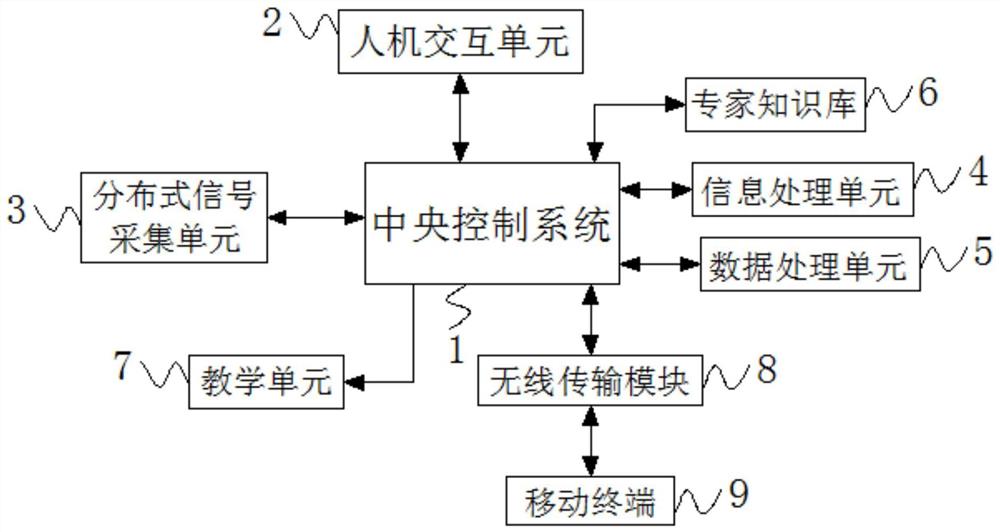
为实现以上目的,本发明通过以下技术方案予以实现:一种具有分布式采集装置的机器人教育诱导系统,包括中央控制系统,所述中央控制系统通过无线与人机交互单元实现双向连接,所述中央控制系统通过无线与分布式信号采集单元实现双向连接,所述中央控制系统通过无线与信息处理单元实现双向连接,所述中央控制系统通过无线与数据处理单元实现双向连接,所述中央控制系统通过无线与专家知识库实现双向连接,所述中央控制系统的输出端与教学单元的输入端电性连接,所述中央控制系统通过无线与无线传输模块实现双向连接,且无线传输模块通过无线与移动终端实现双向连接。
优选的,所述分布式信号采集单元包括摄像采集模块、语音识别模块、红外传感模块和位移传感模块,所述信息处理单元包括语音接收模块、视频接收模块、信息整合模块和分析模块。
优选的,所述教学单元包括语音播报模块、视频播放模块、互动模块和反馈模块,所述专家知识库包括网络搜索模块、学生特征库和更新模块。
优选的,所述人机交互单元包括微处理器,所述微处理器的输入端与语言选择模块的输出端电性连接。
优选的,所述微处理器的输入端与声线选择模块的输出端电性连接,所述微处理器的输入端与音量调节模块的输出端电性连接。
优选的,所述微处理器的输入端与进度保存模块的输出端电性连接。
优选的,所述数据处理单元包括数据库,所述数据库的输入端与统计模块的输出端电性连接。
优选的,所述数据库的输入端与删除模块的输出端电性连接,所述数据库的输入端与防护模块的输出端电性连接。
(三)有益效果
本发明提供了一种具有分布式采集装置的机器人教育诱导系统。与现有技术相比具备以下有益效果:
(1)、该具有分布式采集装置的机器人教育诱导系统,通过中央控制系统通过无线与分布式信号采集单元实现双向连接,中央控制系统通过无线与信息处理单元实现双向连接,分布式信号采集单元包括摄像采集模块、语音识别模块、红外传感模块和位移传感模块,信息处理单元包括语音接收模块、视频接收模块、信息整合模块和分析模块,通过分布式信号采集单元对儿童的学习状态和学习时发出的语音进行跟踪采集,然后信息处理单元对采集的信息进行接收、整合和分析,便于根据该采集分析后数据信息制定相应的学习诱导方案,能够根据不同儿童的特征进行教育诱导,具有较强的针对性与专业特色,从而提高了学习效率。
(2)、该具有分布式采集装置的机器人教育诱导系统,通过教学单元包括语音播报模块、视频播放模块、互动模块和反馈模块,在学习时,学生通过语音播报模块和视频播放模对学习的内容进行观看学习,同时通过互动模块能够对学习的内容进行练习和巩固,学习效果更好,满足不同特征的儿童进行使用。
(3)、该具有分布式采集装置的机器人教育诱导系统,通过人机交互单元包括微处理器,微处理器的输入端与语言选择模块的输出端电性连接,微处理器的输入端与声线选择模块的输出端电性连接,微处理器的输入端与音量调节模块的输出端电性连接,在进行内容的学习时,语言选择模块、声线选择模块和音量调节模块的设置,方便根据自身的喜好对一些参数进行设置,提高学生学习时的兴趣,提升与机器人之间的交互关系。
附图说明
图1为本发明系统的结构原理框图;
图2为本发明人机交互单元的结构原理框图;
图3为本发明分布式信号采集单元的结构原理框图;
图4为本发明信息处理单元的结构原理框图;
图5为本发明教学单元的结构原理框图;
图6为本发明数据处理单元的结构原理框图;
图7为本发明专家知识库的结构原理框图。
图中,1中央控制系统、2人机交互单元、21微处理器、22语言选择模块、23声线选择模块、24音量调节模块、25进度保存模块、3分布式信号采集单元、31摄像采集模块、32语音识别模块、33红外传感模块、34位移传感模块、4信息处理单元、41语音接收模块、42视频接收模块、43信息整合模块、44分析模块、5数据处理单元、51数据库、52统计模块、53删除模块、54防护模块、6专家知识库、61网络搜索模块、62学生特征库、63更新模块、7教学单元、71语音播报模块、72视频播放模块、73互动模块、74反馈模块、8无线传输模块、9移动终端。
具体实施方式
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1-7,本发明实施例提供一种技术方案:一种具有分布式采集装置的机器人教育诱导系统,包括中央控制系统1,中央控制系统1通过无线与人机交互单元2实现双向连接,中央控制系统1通过无线与分布式信号采集单元3实现双向连接,中央控制系统1通过无线与信息处理单元4实现双向连接,中央控制系统1通过无线与数据处理单元5实现双向连接,中央控制系统1通过无线与专家知识库6实现双向连接,中央控制系统1的输出端与教学单元7的输入端电性连接,中央控制系统1通过无线与无线传输模块8实现双向连接,且无线传输模块8通过无线与移动终端9实现双向连接。
本发明实施例中,分布式信号采集单元3包括摄像采集模块31、语音识别模块32、红外传感模块33和位移传感模块34,摄像采集模块31对儿童学习时的状态进行拍摄,语音识别模块32采用全向麦克风阵列,全向麦克风阵列使得机器人全方位对学习语言时发出的声音进行采集,红外传感模块33用于搜索和跟踪人的行动轨迹,确定其空间位置并通过位移传感模块34对使用者的运动进行跟踪,信息处理单元4包括语音接收模块41、视频接收模块42、信息整合模块43和分析模块44,语音接收模块41将采集到的声音进行实时接收,视频接收模块42将采集到的视频进行接收,通过信息整合模块43将采集到的视频与语音信息进行整合,分析模块44对整合的信息进行分析,分析儿童学习过程中的行为状态与内容薄弱点。
本发明实施例中,教学单元7包括语音播报模块71、视频播放模块72、互动模块73和反馈模块74,互动模块73根据学习的薄弱点出题,与使用者进行语音对话练习,对学习内容进行巩固,反馈模块74根据学习后的成果对使用者的学习状况进行判断,专家知识库6包括网络搜索模块61、学生特征库62和更新模块63,通过网络搜索模块61不断调用与课程相关的知识素材,具有自学习能力,学生特征库62根据学生学习时的行为特征、知识特征和能力特征建立多种学生模型,为制定个性化的学习诱导方案时提供重要依据,更新模块63不断对知识库进行更新。
本发明实施例中,人机交互单元2包括微处理器21,微处理器21的输入端与语言选择模块22的输出端电性连接。
本发明实施例中,微处理器21的输入端与声线选择模块23的输出端电性连接,微处理器21的输入端与音量调节模块24的输出端电性连接,使用者通过进入人机交互单元2,能够通过语言选择模块22选择需要学习的语种,如中文、英文或法文等,音量调节模块24对语音播报时的音量进行调节,通过声线转换模块对播报的声音进行选择,如男声、女声或卡通等,根据自身的喜好对参数进行设置,提高学生学习时的兴趣,提升与机器人之间的交互关系。
本发明实施例中,微处理器21的输入端与进度保存模块25的输出端电性连接,进度保存模块25将学习的进度进行保存,方便下次继续。
本发明实施例中,数据处理单元5包括数据库51,数据库51的输入端与统计模块52的输出端电性连接。
本发明实施例中,数据库51的输入端与删除模块53的输出端电性连接,数据库51的输入端与防护模块54的输出端电性连接,同时本说明书中未作详细描述的内容均属于本领域技术人员公知的现有技术。
工作时,摄像采集模块31对儿童学习时的状态进行拍摄,语音识别模块32同时采用全向麦克风阵列,对学习语言时发出的声音进行采集识别,红外传感模块33用于搜索和跟踪人的行动轨迹,确定其空间位置并通过位移传感模块34对使用者的运动进行跟踪,然后语音接收模块41将采集到的声音进行实时接收,视频接收模块42将采集到的视频进行接收,通过信息整合模块43将采集到的视频与语音信息进行整合,分析模块44对整合的信息进行分析,分析儿童学习过程中的行为状态与内容薄弱点,同时通过专家知识库6的资源,为使用者制定专门的学习诱导方案,同时采集的信息与分析结果储存在数据库51中,统计模块52将数据库51中的信息进行详细统计,防护模块54将数据库51进行安全防护,防止病毒入侵,删除模块53将数据库51中不需要的信息进行删除,使用者通过进入人机交互单元2,能够通过语言选择模块22选择需要学习的语种,如中文、英文或法文等,音量调节模块24对语音播报时的音量进行调节,通过声线转换模块对播报的声音进行选择,如男声、女声或卡通等,进度保存模块25将学习的进度进行保存,方便下次继续,学习时,通过语音播报模块71对教学语音进行播放,视频播放模块72同步对教学视频进行播放,对使用者进行正确的教育诱导,互动模块73根据学习的薄弱点出题,与使用者进行语音对话练习,对学习内容进行巩固,反馈模块74根据学习后的成果对使用者的学习状况进行判断,专家知识库6通过网络搜索模块61不断调用与课程相关的知识素材,具有自学习能力,学生特征库62根据学生学习时的行为特征、知识特征和能力特征建立多种学生模型,为制定个性化的学习诱导方案时提供重要依据,更新模块63不断对知识库进行更新,中央控制系统1通过无线传输模块8能够将教学单元7中的语音与视频信息传输至移动终端9上,方便远程根据语音与视频进行学习。
需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种具有分布式采集装置的机器人教育诱导系统
- 一种智慧交通诱导系统用信息采集装置