一种汽车抬头显示器成像距离测量方法及系统
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及汽车终端装配技术领域,具体地,涉及一种汽车抬头显示器成像距离测量方法及系统。
背景技术
汽车抬头显示器是指以驾驶员为中心、盲操作、多功能仪表盘,可以把时速、导航等重要的行车信息投影到驾驶员前面的风挡玻璃上,在玻璃前方形成影像,让驾驶员尽量做到不低头、不转头就能看到时速、导航等重要的驾驶信息。
对汽车抬头显示器的测试,是将抬头显示器虚像呈现于汽车前挡风玻璃位置,于驾驶者之视角范围内可视,将相机置放于驾驶者眼盒位置拍摄,测试软件通过相机撷取抬头显示器虚像,分析抬头显示器虚像,以评断抬头显示器虚像之成像质量。虚像之成像质量决定于抬头显示器投射至自由曲面镜再反射至前挡风玻璃之结果,其自由曲面镜之设计、制作、安装以及挡风玻璃之设计、制作、安装皆会对成像质量造成影响。自由曲面镜之设计、制作、安装以及挡风玻璃之设计、制作、安装一旦有误,会造成虚像之成像结果产生各式样的变形以及重影现象。
目前使用在汽车终端装配线的汽车抬头显示器检测系统,具有体积庞大,安装不易,操作流程复杂,校正困难,针对不同车型需大量修改等缺点。
专利文献CN208805344U(申请号:201821657606.2)公开了一种汽车抬头显示器终端装配检测系统,包括支架部分的固定座、升降柱、平行轨道和连动支架,车前定位部分的前挡定位杆、定位测试板和车前定位横杆,相机机械臂的相机座、检测相机、相机臂横杆轨道和相机臂横杆。已安装好抬头显示器的汽车开入检测车道,前挡风玻璃顶到前挡定位杆,平行轨道、连动支架确保车辆完全顶住前挡定位杆又不会伤及汽车玻璃;相机臂横杆轨道、相机臂横杆旋转90度,相机臂横杆对准驾驶座车窗伸入驾驶座,检测相机检测抬头显示器所显示画面。
发明内容
针对现有技术中的缺陷,本发明的目的是提供一种汽车抬头显示器成像距离测量方法及系统。
根据本发明提供的一种汽车抬头显示器成像距离测量方法,包括:
步骤S1:对相机进行标定得到固定系数pixel_degree;
步骤S2:相机位于P1位置时拍摄固定点c采集虚像图1,测得固定点c在虚像图1中的位置坐标d;
步骤S3:相机位于P2位置时拍摄固定点c采集虚像图2,测得固定点c在虚像图2中的位置坐标f;
步骤S4:计算固定点c在虚像图1中的位置坐标d和固定点c在虚像图2中的位置坐标f的偏移pixel_shift;
步骤S5:计算相机P1位置和相机P2位置的间距camera_shift;
步骤S6:根据相机标定固定系数pixel_degree、偏移pixel_shift以及相机P1位置和相机P2位置的间距camera_shift,计算成像距离L。
优选地,所述步骤S1包括:
步骤S1.1:安装圆点标定板,圆点对准相机中心;
步骤S1.2:调节相机工作距离为预设值WD,采集虚像图11,并定位圆点在虚像图11中的坐标;
步骤S1.3:控制机器人移动相机平移预设值camera_shift′,并保持相机采集角度不变,采集虚像图22,并定位圆点在虚像图22中的坐标;
步骤S1.4:计算圆点在两幅图像中的像素距离pixel_shift′,并计算固定系数pixel_degree。
优选地,所述步骤S1.8包括:
pixel/degree=2π*pixel_shift′/360*atan(camera_shift′/WD) (1)。
优选地,所述步骤S6包括:
pixel/degree=2π*pixel_shift/360*atan(camera_shift/L) (2)。
根据本发明提供的一种汽车抬头显示器成像距离测量系统,包括:
模块M1:对相机进行标定得到固定系数pixel_degree;
模块M2:相机位于P1位置时拍摄固定点c采集虚像图1,测得固定点c在虚像图1中的位置坐标d;
模块M3:相机位于P2位置时拍摄固定点c采集虚像图2,测得固定点c在虚像图2中的位置坐标f;
模块M4:计算固定点c在虚像图1中的位置坐标d和固定点c在虚像图2中的位置坐标f的偏移pixel_shift;
模块M5:计算相机P1位置和相机P2位置的间距camera_shift;
模块M6:根据相机标定固定系数pixel_degree、偏移pixel_shift以及相机P1位置和相机P2位置的间距camera_shift,计算成像距离L。
优选地,所述模块M1包括:
模块M1.1:安装圆点标定板,圆点对准相机中心;
模块M1.2:调节相机工作距离为预设值WD,采集虚像图11,并定位圆点在虚像图11中的坐标;
模块M1.3:控制机器人移动相机平移预设值camera_shift′,并保持相机采集角度不变,采集虚像图22,并定位圆点在虚像图22中的坐标;
模块M1.4:计算圆点在两幅图像中的像素距离pixel_shift′,并计算固定系数pixel_degree。
优选地,所述模块M1.8包括:
pixel/degree=2π*pixel_shift′/360*atan(camera_shift′/WD) (1)。
优选地,所述模块M6包括:
pixel/degree=2π*pixel_shift/360*atan(camera_shift/L) (2)。
与现有技术相比,本发明具有如下的有益效果:
1、本发明使用机器人手臂带动相机,只需1个相机,相机位置/角度可任意设定;
2、本发明避免相机之间的差异带来测量的偏差,可兼容多型号测量;
附图说明
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
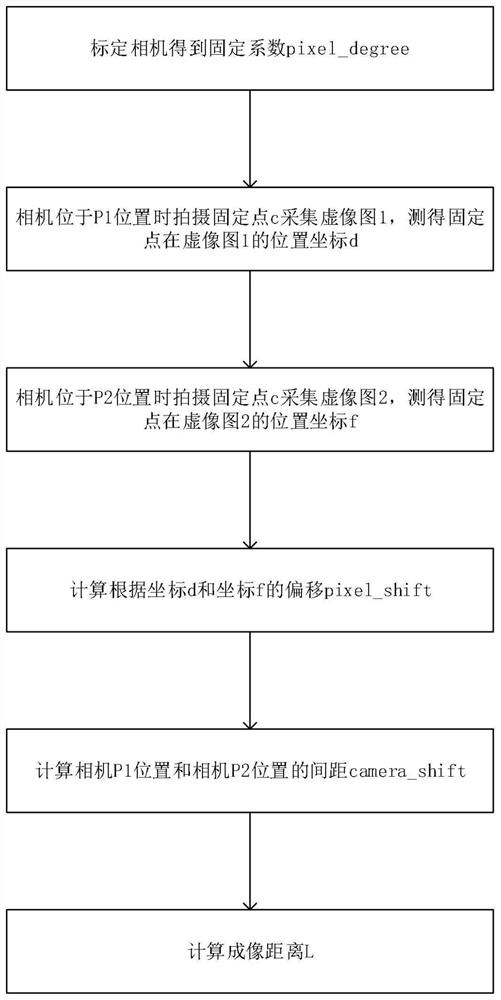
图1为汽车抬头显示器成像距离测量方法流程图;
图2为汽车抬头显示器测试系统结构示意图;
图3为汽车抬头显示器测试系统原理示意图
图4为相机进行标定得到固定系数示意图;
图5为汽车抬头显示器成像距离测量系统示意图;
图6为汽车抬头显示器成像距离测量系统示意图。
具体实施方式
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
传统相机测距,使用双相机方案,即左右各安装1各摄像机。缺点有两个,一是2个摄像机之间的差异需要校准;二是2个摄像机之间的距离由机械结构限制,不能灵活变换之间的间距。
根据本发明提供的一种汽车抬头显示器成像距离测量方法,如图1至图6所示,包括:
步骤S1:对相机进行标定得到固定系数pixel_degree;
步骤S2:相机位于P1位置时拍摄固定点c采集虚像图1,测得固定点c在虚像图1中的位置坐标d;
步骤S3:相机位于P2位置时拍摄固定点c采集虚像图2,测得固定点c在虚像图2中的位置坐标f;
步骤S4:计算固定点c在虚像图1中的位置坐标d和固定点c在虚像图2中的位置坐标f的偏移pixel_shift;
步骤S5:计算相机P1位置和相机P2位置的间距camera_shift;
步骤S6:根据相机标定固定系数pixel_degree、偏移pixel_shift以及相机P1位置和相机P2位置的间距camera_shift,计算成像距离L。
具体地,所述步骤S1包括:
步骤S1.1:安装圆点标定板,圆点对准相机中心;
步骤S1.2:调节相机工作距离为预设值WD,采集虚像图11,并定位圆点在虚像图11中的坐标;
步骤S1.3:控制机器人移动相机平移预设值camera_shift′,并保持相机采集角度不变,采集虚像图22,并定位圆点在虚像图22中的坐标;
步骤S1.4:计算圆点在两幅图像中的像素距离pixel_shift′,并计算固定系数pixel_degree。
具体地,所述步骤S1.8包括:
pixel/degree=2π*pixel_shift′/360*atan(camera_shift′/WD) (1)。
具体地,所述步骤S6包括:
pixel/degree=2π*pixel_shift/360*atan(camera_shift/L) (2)。
根据本发明提供的一种汽车抬头显示器成像距离测量系统,包括:
模块M1:对相机进行标定得到固定系数pixel_degree;
模块M2:相机位于P1位置时拍摄固定点c采集虚像图1,测得固定点c在虚像图1中的位置坐标d;
模块M3:相机位于P2位置时拍摄固定点c采集虚像图2,测得固定点c在虚像图2中的位置坐标f;
模块M4:计算固定点c在虚像图1中的位置坐标d和固定点c在虚像图2中的位置坐标f的偏移pixel_shift;
模块M5:计算相机P1位置和相机P2位置的间距camera_shift;
模块M6:根据相机标定固定系数pixel_degree、偏移pixel_shift以及相机P1位置和相机P2位置的间距camera_shift,计算成像距离L。
具体地,所述模块M1包括:
模块M1.1:安装圆点标定板,圆点对准相机中心;
模块M1.2:调节相机工作距离为预设值WD,采集虚像图11,并定位圆点在虚像图11中的坐标;
模块M1.3:控制机器人移动相机平移预设值camera_shift′,并保持相机采集角度不变,采集虚像图22,并定位圆点在虚像图22中的坐标;
模块M1.4:计算圆点在两幅图像中的像素距离pixel_shift′,并计算固定系数pixel_degree。
具体地,所述模块M1.8包括:
pixel/degree=2π*pixel_shift′/360*atan(camera_shift′/WD) (1)。
具体地,所述模块M6包括:
pixel/degree=2π*pixel_shift/360*atan(camera_shift/L) (2)。
实施例2是实施例1的优选例
测量系统之成像距离测量
抬头显示器成像的原理说明
如图1所示,方框为待测产品(WHUD抬头显示器),标号1是图像信号源;标号2是反光镜1;标号3反光镜2;以上三者,是待测产品(WHUD抬头显示器)内部的三个部件。标号4是汽车挡风玻璃;标号5是虚像;标号6是驾驶员视窗(驾驶员眼睛的位置)
成像的光路如下描述:
图像信号源产生图像源1,先后经过反光镜12和反光镜23镜子反射,然后在汽车挡风玻璃4上形成虚像5。汽车挡风玻璃4也相当于一面镜子,虚像5即是镜子中的像。驾驶员在驾驶员视窗6观测挡风玻璃中的虚像5。对于测量系统来讲,驾驶员视窗6也是相机安装的位置。
反光镜23由一个步进马达(WHUD抬头显示器内部部件之一)带动,可角度旋转,当反光镜23角度变化时,光路方向随着发生相应变化,从而导致虚像5的位置也发生改变(上下位置变化,以适应不同身高的驾驶员)
成像距离,是指驾驶员眼睛到抬头显示器虚像的距离。如图1所示,Eye-box(驾驶员眼窗)与Virtual image(抬头显示器在汽车挡风玻璃上呈现的虚像)之间的距离。
设备实现结构框架:如图2所示,包括:抬头显示器虚像A;步进电机滑台B;(可平移D,以便取放待测产品)待测产品–抬头显示器C;仿真汽车挡风玻璃D;相机E;机器人F,可带动相机实现多位置测量;
挡风玻璃D,待测产品WHUD抬头显示器C,测量相机E,驾驶员视窗位置,三者之间的空间位置与汽车图纸相符,即,挡风玻璃、WHUD、驾驶员三者的位置。测试时,必须保证挡风玻璃D,待测产品WHUD抬头显示器C,测量相机E的以上整车相对位置。
步进电机滑台B,挡风玻璃D是一个整体,步进电机滑台B,是固定挡风玻璃D的支架。步进电机滑台B安装在水平滑台,可以左右水平滑动,其目的是,当它向左移动时,可避开一个空间,以便工人取放待测产品WHUD抬头显示器C。
机器人F是6轴机器人,相机E,相机E安装在机器人上。通过控制机器人F,可以调整相机E的视角和位置,模拟眼窗中不同位置,进行拍照测量。
成像距离测量流程如下:
1、将待测产品C放置于测试工装夹具中;
2、步进电机滑台B将仿真挡风玻璃D移动至测量点位置,此位置需满足仿真挡风玻璃D与待测产品C之间的位置关系,和汽车中抬头显示器产品C与汽车挡风玻璃的相对位置相同,以保证正确的成像光路;
3、机器人手臂F带动相机E移动至位置p1,采集图像img1;
4、机器人手臂F带动相机E移动至位置p2,采集图像img2;如图5所示,p0位置虚像光路中心轴线上、p1相对于p0平移50mm,p2相对于p0反方向平移50mm。
成像距离L计算方法:
首先,如图3所示,对相机进行标定得固定系数=pixel/degree,记作k;只做一次,即,设备搭建时做一次性标定。
对相机进行标定得固定系数,包括:
1、安装dot标定板,dot对准相机中心;
2、调节相机工作距离为2000mm(WD)
3、采集图像1;
4、使用图像处理软件定位dot在图像1中的坐标;
5、控制机器人移动相机平移100mm(camera_shift),并保持相机采集角度不变;
6、采集图像2;
7、使用图像处理软件定位dot在图像2中的坐标;
8、计算dot在两幅图像中的像素距离pixel_shift;
9、计算系数;
pixel/degree=2π*pixel_shift/360*atan(camera_shift/WD)
在生产过程中的测量过程是:
相机位于p1位置采集一幅图1,测得虚像中心坐标1
相机位于p2位置采集一幅图2,测得虚像中心坐标2
计算图4中虚像中心坐标1,2的像素偏移,即,pixel_shift
相机位置p1和p2的间距是设定值=100mm,即,Camera_shift=100mm
由k=2π*pixel_shift/360*atan(Camera_shift/WD)公式,可求得WD(WD,即,成像距离L)。
本领域技术人员知道,除了以纯计算机可读程序代码方式实现本发明提供的系统、装置及其各个模块以外,完全可以通过将方法步骤进行逻辑编程来使得本发明提供的系统、装置及其各个模块以逻辑门、开关、专用集成电路、可编程逻辑控制器以及嵌入式微控制器等的形式来实现相同程序。所以,本发明提供的系统、装置及其各个模块可以被认为是一种硬件部件,而对其内包括的用于实现各种程序的模块也可以视为硬件部件内的结构;也可以将用于实现各种功能的模块视为既可以是实现方法的软件程序又可以是硬件部件内的结构。
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本申请的实施例和实施例中的特征可以任意相互组合。
- 一种汽车抬头显示器成像距离测量方法及系统
- 距离测量装置、头戴式显示器装置、便携信息终端、影像显示装置、周边监视系统以及距离测量方法