一种双运动台精密协同控制系统及方法
文献发布时间:2023-06-19 11:35:49
技术领域
本发明涉及一种控制系统及方法,尤其是一种双运动台精密协同控制系统及方法,属于超精密装备制造领域。
背景技术
超精密装备在工作过程中,往往需要多个机构协同配合来满足复杂的工艺需求,而且协同运动精度具有较高要求。以我国正在研发的浸没式光刻机为例,为了满足成像精度要求,匀速曝光过程中,掩模台与工件台必须按4:1的轨迹关系在扫描方向上协同运动,同步误差要满足MA(Moving Average)<0.5nm,MSD(Moving Standard Deviation)<5nm的严苛要求。
我国现有节点光刻机所采用的“PID反馈+加速度前馈”的控制策略由于受限于运动平台机械带宽和模型精度,已经无法满足如此苛刻的精度要求,亟需研究新的协同控制系统及方法。美国加州大学、荷兰埃因霍温理工大学、我国的清华大学等国际著名高校曾将迭代学习控制方法引入到光刻机掩模台与工件台在扫描方向的协同运动中,但是现有方法往往仅能提升单个运动台的伺服精度或者双运动台的协同运动精度,无法同时提升单个运动台的伺服精度与双运动台的协同运动精度,而且迭代过程缓慢,控制精度对外部扰动敏感、鲁棒性较差,不适用于实际工程应用。
发明内容
为解决传统协同控制系统及方法无法同时提升单个运动台的伺服精度与双运动台的协同运动精度,且迭代过程缓慢、鲁棒性较差的问题,本发明提供一种双运动台精密协同控制系统及方法,采用迭代学习方法进行协同控制,相比传统协同控制系统及方法不仅能够提升双运动台的协同运动精度,同时还可以提升单个运动台的伺服精度,而且收敛速度较快、抗扰能力较强,适用于实际工程应用。
为实现上述目的,本发明采取下述技术方案:一种双运动台精密协同控制系统,包括轨迹生成器C
一种双运动台精密协同控制方法,包括以下步骤:
步骤一:迭代实验次数j赋初值为j=1,前馈控制信号
步骤二:进行第j次迭代实验,运行协同控制系统,分别测量运动台1的实际运动轨迹
步骤三:按如下方式更新前馈控制信号e
其中,z为时间前移算子,对于任意离散信号x(k)满足z
步骤四:迭代次数j值加1,转至步骤二,直至协同运动误差
与现有技术相比,本发明的有益效果是:传统协同控制系统及方法要么以单个运动台的伺服误差为学习对象,要么以双运动台的协同运动误差为学习对象,不能同时减少两个运动台各自的伺服误差和双运动台的协同运动误差,而且学习收敛过程缓慢,鲁棒性较差,而本发明可同时减少两个具有不同机械特性的运动台各自的伺服误差和双运动台的协同运动误差,采用自适应方法设计学习系数,提高收敛速度,对外部随机扰动具有较高鲁棒性,抗扰能力较强,适用于实际工程应用。
附图说明
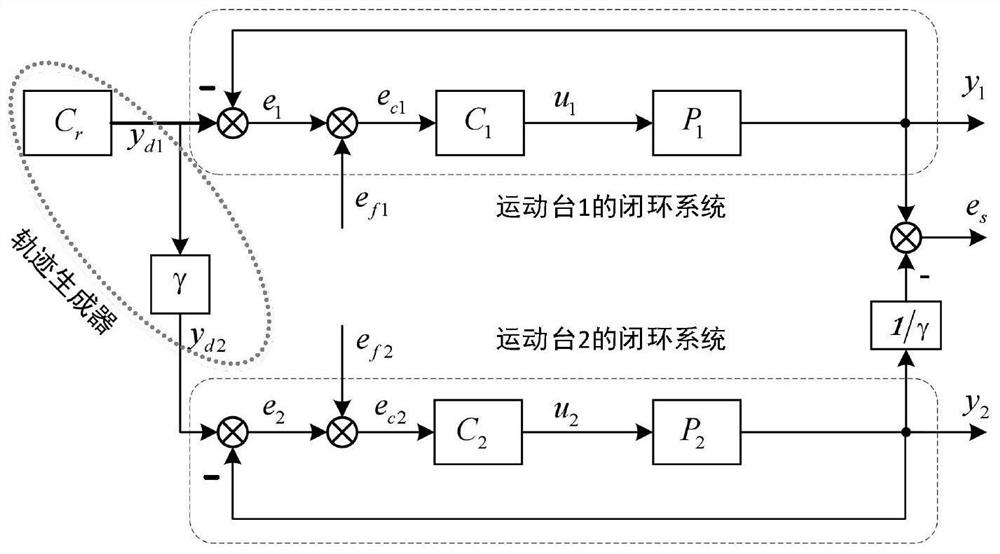
图1是本发明的双运动台精密协同控制系统的原理示意图;
图2是实施例在仿真中运动台1的期望运动轨迹;
图3是实施例在仿真中协同运动误差的对比图;
图4是实施例在仿真中协同运动误差范数的迭代过程的对比图;
图5是实施例在仿真中运动台1的伺服误差对比图;
图6是实施例在仿真中运动台1的伺服误差范数的迭代过程的对比图;
图7是实施例在仿真中运动台2的伺服误差对比图;
图8是实施例在仿真中运动台2的伺服误差范数的迭代过程的对比图。
具体实施方式
下面将结合本发明实施例中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅是发明的一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
一种双运动台精密协同控制系统,参照图1所示,包括轨迹生成器C
所述运动台1的闭环系统包括反馈控制器C
所述运动台1的模型P
所述轨迹生成器C
运动台1的闭环系统根据运动台1的期望运动轨迹y
所述运动台1的伺服误差e
运动台1的实际运动轨迹y
一种双运动台精密协同控制方法,通过迭代学习方法逐步减少协同运动误差,包括以下步骤:
步骤一:迭代实验次数j赋初值为j=1,前馈控制信号
步骤二:进行第j次迭代实验,运行协同控制系统,分别测量运动台1的实际运动轨迹
步骤三:按如下方式更新前馈控制信号e
其中,z为时间前移算子,对于任意离散信号x(k)满足z
本步骤中,学习系数α
其中
相位超前系数β按下式确定:
其中T
步骤四:迭代次数j值加1,转至步骤二,直至协同运动误差
实施例:
本实施例中轨迹生成器C
运动台1的闭环系统中反馈控制器C
运动台2的闭环系统中反馈控制器C
协同控制系统采样周期为T
为了显示本发明的优越性,在本实施例中,通过与文献“姜晓明,于志亮,陈兴林.扫描光刻同步控制系统中的迭代学习控制,Proceedings of the World Congress onIntelligent Control and Automation(WCICA),2014”中给出的双台协同控制系统及方法进行仿真对比,仿真过程中,为了更准确地模拟实际情况,对运动台1与运动台2的实际运动轨迹叠加了方差为2×10
比较结果参照图3~图8所示,其中图3、图5、图7显示了最后一次迭代实验后各误差的对比,图4、图6、图8显示了各误差范数随着迭代次数的变化情况;
图3、图4显示了双台协同运动误差的对比,可以看出本发明与现有方法经过数次迭代均可减少协同运动误差,但是本发明所提出的方法收敛速度较快,同时可以看出在相同外部扰动水平下本发明可达到比现有方法更小的协同运动误差,说明本发明鲁棒性较高、抗扰能力强,因为本发明采用了自适应方法设计学习系数;
图5、图6显示了运动台1的伺服误差的对比,可以看出本发明中运动台1的伺服误差随着迭代次数的增加不断减少,而现有方法中运动台1的伺服误差保持不变,这是由于现有方法中运动台1的闭环系统缺少前馈控制信号e
图7、图8显示了运动台2的伺服误差的对比,可以看出本发明中运动台2的伺服误差随着迭代次数的增加不断减少,而现有方法中运动台2的伺服误差却不断增大,这是由于现有方法中运动台1的伺服误差保持不变,为了实现两个运动台的协同运动,现有方法迫使运动台2的误差改变,从而实现与运动台1的同步;
综合图3-图8所示结果可以看出,相比现有方法,本发明不仅可以同时降低双台协同运动误差与单台伺服误差,而且收敛速度较快、鲁棒性较强,可实现更高的协同运动精度。
对于本领域技术人员而言,显然本发明不限于上述示范性实施例的细节,而且在不背离本发明的精神或基本特征的情况下,能够以其他的装体形式实现本发明。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本发明的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同条件的含义和范围内的所有变化囊括在本发明内。不应将权利要求中的任何附图标记视为限制所涉及的权利要求。
此外,应当理解,虽然本说明书按照实施方式加以描述,但并非每个实施方式仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
- 一种双运动台精密协同控制系统及方法
- 一种双运动台精密协同控制系统及方法