腹腔支撑机构及腹腔支撑设备
文献发布时间:2023-06-19 11:39:06
技术领域
本发明涉及医疗器械技术领域,尤其提供一种腹腔支撑机构及腹腔支撑设备。
背景技术
近年来,随着科学技术的发展,微创手术越来越受到广大患者的青睐。相对传统的开腹手术,微创手术具有创伤小、疼痛轻、恢复周期短等优点。
微创手术的入路主要分为多孔、单孔和经人体自然腔道。其中,经人体自然腔道手术是将内窥镜和手术操作工具经过人体的鼻腔、口腔、阴道或肛门等腔道置入人体内部以对病灶进行手术。而在进行经人体自然腔道的腹腔镜手术前,需要对人体的腹腔进行支撑,以确保有足够的手术空间。
目前,主流的腹腔支撑技术为气腹术,即使用气腹机向腹腔内填充诸如二氧化碳等气体,通过气体压力将人体的腹壁撑起的技术。但是,气腹术一般会对人体的呼吸系统和血液循环系统产生不良影响,甚至引起气体栓塞等一些列严重问题,导致气腹术无法适用于伴有心血管疾病的患者,使用安全性差且使用局限性大;而且气腹术所需要使用的气腹机及麻醉药物均较为昂贵,导致手术成本大幅升高。
发明内容
本发明的目的在于提供一种腹腔支撑机构及腹腔支撑设备,旨在解决现有经人体自然腔道的腹腔镜手术中所采用的腹腔支撑方式安全性差且局限性大的技术问题。
为实现上述目的,本发明实施例采用的技术方案是:一种腹腔支撑机构,包括具有第一牵引孔的基座,以及具有支撑状态和柔性状态的支撑组件,所述支撑组件包括均安装于所述基座上的多个支撑臂;
所述支撑臂包括具有连接端和牵引端的牵引件,均具有第二牵引孔的多个支撑体,以及设于所述支撑臂远离所述基座的一端的连接体,相邻两所述支撑体可活动地连接,以使相邻两所述支撑体做相对偏转运动,所述牵引件的所述连接端依次穿过各所述支撑体的所述第二牵引孔后与所述连接体相连接且所述牵引端经所述基座的所述第一牵引孔向外穿出;
当拉动各所述牵引件的所述牵引端时,所述支撑组件进入所述支撑状态;当释放各所述牵引件的所述牵引端时,所述支撑组件进入所述柔性状态。
本发明实施例提供的腹腔支撑机构至少具有以下有益效果:上述腹腔支撑机构可通过机架固定于病床或地面上,在使用时,将各牵引件的牵引端释放,使支撑组件处于柔性状态,然后将支撑组件的各支撑臂从诸如阴道、肛门等人体自然腔道置入人体内部,接着拉动各牵引件的牵引端,随后各支撑臂的相邻两支撑体做相对偏转运动,使各支撑臂弯折成预设形态,支撑组件进入支撑状态,以支撑人体的腹壁,从而在人体内部形成足够的手术空间;可见,上述腹腔支撑机构通过支撑组件直接对人体腹壁进行支撑,对人体无害,使用安全性好,且可适用于各类患者,使用局限性小,另外,上述腹腔支撑机构的结构简单,使用成本低,且在使用过程中无需对患者额外注射麻醉药物,有效降低手术成本。
在其中一实施例中,所述支撑臂的相邻两所述支撑体通过柔性连接件可活动地连接。
在其中一实施例中,所述支撑臂的相邻两所述支撑体之间设有凹凸定位结构。
在其中一实施例中,所述支撑臂的相邻两所述支撑体相互铰接。
在其中一实施例中,所述支撑臂的各所述支撑体分为多个远端支撑体、多个近端支撑体和至少一过渡支撑体,各所述远端支撑体依次连接形成第一臂体,各所述近端支撑体依次连接形成第二臂体,所述第一臂体通过所述过渡支撑体与所述第二臂体相连接。
在其中一实施例中,所述支撑臂的各所述远端支撑体的所述第二牵引孔开设于所述支撑臂的一侧以形成第一牵引通道,所述支撑臂的各所述近端支撑体的所述第二牵引孔开设于所述支撑臂的另一侧以形成第二牵引通道,所述支撑臂的所述过渡支撑体的所述第二牵引孔沿所述过渡支撑体的对角方向延伸,以将所述第一牵引通道和所述第二牵引通道连通。
在其中一实施例中,所述支撑组件包括三个所述支撑臂,各所述支撑臂沿圆周方向相互分隔地安装于所述基座上。
在其中一实施例中,所述基座靠近所述支撑组件的一端设有多个定位槽,各所述支撑臂靠近所述基座的一端分别置于对应的所述定位槽内。
在其中一实施例中,所述基座设有自所述基座远离所述支撑组件的一端向靠近所述支撑组件的一端的方向延伸的操作通道。
为实现上述目的,本发明还提供一种腹腔支撑设备,包括机架、牵引机构和上述腹腔支撑机构,所述腹腔支撑机构的基座安装于所述机架上,所述腹腔支撑机构的各牵引件的牵引端均与所述牵引机构的动力输出端相连接。
由于上述腹腔支撑设备采用了上述腹腔支撑机构的所有实施例,因而至少具有上述实施例的所有有益效果,在此不再一一赘述。
附图说明
为了更清楚地说明本发明实施例中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
图1为本发明实施例提供的腹腔支撑设备的结构示意图;
图2为本发明实施例提供的腹腔支撑机构处于支撑状态下的结构示意图;
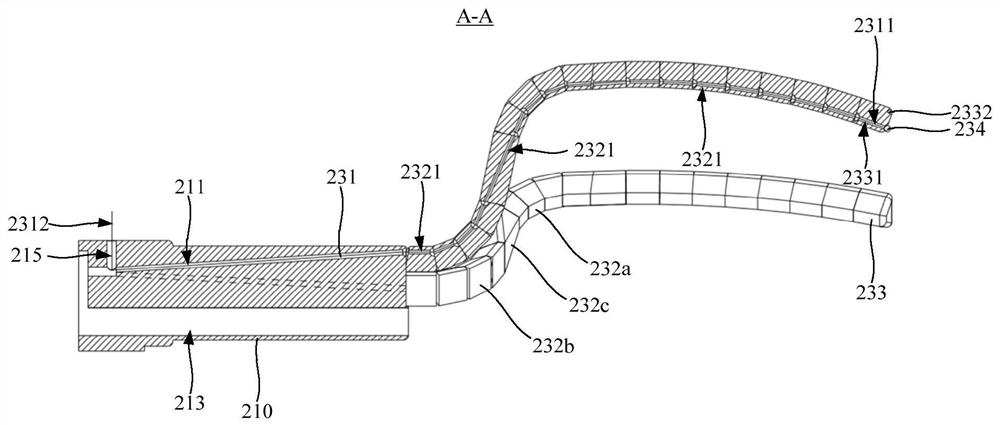
图3为图2所示的腹腔支撑机构的A-A向剖视图;
图4为本发明实施例提供的腹腔支撑机构处于柔性状态下的结构示意图;
图5为本发明实施例提供的基座的结构示意图;
图6为本发明实施例提供的远端支撑体的结构示意图;
图7为本发明实施例提供的近端支撑体的结构示意图;
图8为本发明实施例提供的过渡支撑体的结构示意图。
其中,图中各附图标记:
100、腹腔支撑设备,200、腹腔支撑机构,210、基座,211、第一牵引孔,212、定位槽,213、操作通道,214、第四连接孔,215、汇聚孔,220、支撑组件,230、支撑臂,231、牵引件,2311、连接端,2312、牵引端,232a、远端支撑体,232b、近端支撑体,232c、过渡支撑体,2321、第二牵引孔,2322、第一连接孔,2323、凸部,2324、凹部,2325、连接部,2326、抵靠部,2327、抵靠面,2328、第二锁止槽,233、连接体,2331、第二连接孔,2332、第一锁止槽,234、卡球,300、机架,310、夹持件,400、牵引机构。
具体实施方式
下面详细描述本发明的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
在本发明的描述中,需要理解的是,术语“上”、“下”、“顶”、“底”“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”、“第三”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
实施例一
请结合图2至图4所示,一种腹腔支撑机构200,包括具有第一牵引孔211的基座210,以及具有支撑状态和柔性状态的支撑组件220,支撑组件220包括均安装于基座210上的多个支撑臂230;支撑臂230包括具有连接端2311和牵引端2312的牵引件231,均具有第二牵引孔2321的多个支撑体232a、232b、232c,以及设于支撑臂230远离基座210的一端的连接体233,相邻两支撑体232a、232b、232c可活动地连接,以使相邻两支撑体232a、232b、232c做相对偏转运动,牵引件231的连接端2311依次穿过各支撑体232a、232b、232c的第二牵引孔2321后与连接体233相连接且牵引端2312经基座210的第一牵引孔211向外穿出;当拉动各牵引件231的牵引端2312时,支撑组件220进入支撑状态;当释放各牵引件231的牵引端2312时,支撑组件220进入柔性状态。
上述腹腔支撑机构200在使用时,将各牵引件231的牵引端2312释放,使支撑组件220处于柔性状态(如图4所示),然后将腹腔支撑机构200的支撑组件220从诸如阴道、肛门等人体自然腔道置入人体内部,接着拉动各牵引件231的牵引端2312,随后各支撑臂230的相邻两支撑体232a、232b、232c做相对偏转运动,使各支撑臂230弯折成预设形态,支撑组件220进入支撑状态(如图2所示),以支撑人体的腹壁,从而在人体内部形成足够的手术空间;可见,上述腹腔支撑机构200通过支撑组件220直接对人体腹壁进行支撑,对人体无害,使用安全性好,且可适用于各类患者,使用局限性小,另外,上述腹腔支撑机构200的结构简单,使用成本低,且在使用过程中无需对患者额外注射麻醉药物,有效降低手术成本。
具体地,请结合图3和图5所示,基座210上开设有多个第一牵引孔211和与各第一牵引孔211相连通的汇聚孔215,各支撑臂230的牵引件231的牵引端2312伸入对应的第一牵引孔211后汇聚于基座210的汇聚孔215并从汇聚孔215向外伸出,以便于将各支撑臂230的牵引件231的牵引端2312与牵引机构400的动力输出端相连接,以确保各支撑臂230的牵引件231的拉伸行程相同,从而使各支撑臂230的弯折形态保持一致。
具体地,请结合图3所示,支撑臂230还包括卡球234,支撑臂230的连接体233开设有第二连接孔2331,支撑臂230的牵引件231的连接端2311穿过连接体233的第二连接孔2331后与卡球234相连接,卡球234卡接在连接体233的第二连接孔2331远离对应的支撑体232a、232b、232c的端口,以实现牵引件231与连接体233连接。
当然,牵引件231与连接体233的连接方式包含多种,如熔接方式,捆绑连接方式等,在此不作具体限定。
在本实施例中,支撑臂230的相邻两支撑体232a、232b、232c通过柔性连接件(图中未示)可活动地连接,其中,柔性连接件可为绳索、金属片、橡胶片等,在此不作具体限定。
具体地,请结合图6至图8所示,当采用绳索作为柔性连接件时,支撑臂230的各支撑体232a、232b、232c开设有第一连接孔2322,绳索的一端穿过各支撑体232a、232b、232c的第一连接孔2322后与连接体233相连接且另一端与基座210相连接,以此将支撑臂230的相邻两支撑体232a、232b、232c可活动地连接。
具体地,请结合图6至图8所示,为确保支撑臂230的相邻两支撑体232a、232b、232c的连接稳定性,支撑臂230的各支撑体232a、232b、232c均开设有至少两第一连接孔2322,相应地,绳索有至少两条,各连接绳索的一端穿过对应的第一连接孔2322后与连接体233相连接且另一端均与基座210相连接。
具体地,请结合图3所示,支撑臂230的连接体233开设有相互连通的第三连接孔(图中未示)和第一锁止槽2332,绳索远离基座210的一端依次穿过支撑臂230的各支撑体232a、232b、232c的第一连接孔2322和支撑臂230的连接体233的第三连接孔后锁止在第一锁止槽2332内。
具体地,为避免支撑组件220处于支撑状态时支撑臂230的相邻两支撑体232a、232b、232c之间发生位置偏移,支撑臂230的相邻两支撑体232a、232b、232c之间设有凹凸定位结构。凹凸定位结构包括设于各支撑体232a、232b、232c的一端面上的至少一凸部2323和设于各支撑体232a、232b、232c的另一端面上的至少一凹部2324,当支撑组件220处于支撑状态时,支撑臂230中的相邻两支撑体232a、232b、232c相互抵靠,以使以支撑体232a、232b、232c的凸部2323与另一支撑体232a、232b、232c的凹部2324相配合,有效实现对支撑臂230中的相邻两支撑体232a、232b、232c进行定位。其中,上述凸部2323采用球面结构,相应地,上述凹部2324采用球面结构,在确保各凸部2323与对应的凹部2324能够有效配合的前提下,有效提高支撑臂230中的相邻两支撑体232a、232b、232c做相对偏转运动的顺畅度。
具体地,请结合图6至图8所示,支撑臂230的各支撑体232a、232b、232c均包括开设有第一连接孔2322的连接部2325和设于连接部2325上的抵靠部2326,抵靠部2326的相对两端面均作为抵靠面2327,当支撑组件220处于支撑状态时,支撑臂230的一支撑体232a、232b、232c的一抵靠面2327与邻近的另一支撑体232a、232b、232c的抵靠面2327相抵靠,其中,可根据支撑组件220处于支撑状态时所需支撑臂230的弯折形态将各抵靠面2327设置为斜面或直面,在此不作具体限定。
在本实施例中,请结合图3以及图6至图8所示,支撑臂230的各支撑体232a、232b、232c分为多个远端支撑体232a、多个近端支撑体232b和至少一过渡支撑体232c,各远端支撑体232a依次连接形成第一臂体,各近端支撑体232b依次连接形成第二臂体,第一臂体通过过渡支撑体232c与第二臂体相连接。
具体地,当支撑臂230中的相邻两支撑体232a、232b、232c采用绳索可活动地连接时,绳索分为第一绳段和第二绳段,相应地,请结合图8所示,过渡支撑体232c的第一连接孔2322分为第一孔段和第二孔段,并且,过渡支撑体232c上开设有分别与第一孔段和第二孔段对应连通的两第二锁止槽2328;第一绳段的一端穿过各远端支撑体232a的第一连接孔2322后与连接体233相连接且另一端伸入过渡支撑体232c的第一孔段后锁止于对应的第二锁止槽2328内;第二绳段的一端穿过各近端支撑体232b的第一连接孔2322后与基座210相连接且另一端伸入过渡支撑体232c的第二孔段后锁止于对应的第二锁止槽2328内。
具体地,请结合图3所示,支撑臂230的各远端支撑体232a的第二牵引孔2321开设于支撑臂230的一侧以形成第一牵引通道,支撑臂230的各近端支撑体232b的第二牵引孔2321开设于支撑臂230的另一侧以形成第二牵引通道,支撑臂230的过渡支撑体232c的第二牵引孔2321沿过渡支撑体232c的对角方向延伸,以将第一牵引通道和第二牵引通道连通。通过采用上述技术方案,当支撑组件220处于支撑状态时,各支撑臂230大致呈S型结构,其中,各支撑臂230的第一臂体用于与人体腹壁抵靠,从而对人体腹壁进行支撑。
在本实施例中,请结合图2所示,支撑组件220包括三个支撑臂230,各支撑臂230沿圆周方向相互分隔地安装于基座210上,当支撑组件220处于支撑状态时,三个支撑臂230可有效支撑人体腹壁,从而为施术者提供足够的手术空间,同时通过对支撑臂230的设置数量进行优化,可有效减少支撑臂230对手术所造成的干涉。
当然,支撑臂230的设置数量可根据不同的应用场景进行设定,在此不作具体限定。
在本实施例中,请结合图5所示,基座210靠近支撑组件220的一端设有多个定位槽212,各支撑臂230靠近基座210的一端分别置于对应的定位槽212内,以实现对各支撑臂230进行定位安装,有效提高上述腹腔支撑机构200的结构稳定性。
具体地,请结合图5所示,基座210的各定位槽212内均开设有第四连接孔214,当支撑臂230中的相邻两支撑体232a、232b、232c采用绳索可活动地连接时,各支撑臂230的绳索远离对应的连接体233的一端经对应的第四连接孔214向外伸出,并且锁止于对应的第四连接孔214远离支撑组件220的端口,以实现各支撑臂230与基座210相连接。
当然,各支撑臂230靠近基座210的一端也可采用固定连接方式(如焊接方式、紧固连接方式等)连接于对应的定位槽212内,在此不作具体限定。
在本实施例中,请结合图5所示,基座210设有自基座210远离支撑组件220的一端向靠近支撑组件220的一端的方向延伸的操作通道213。在将支撑组件220经人体自然腔道置入人体内部并且支撑组件220处于支撑状态时,医护人员可通过操作通道213将诸如内窥镜、手术刀等医疗器械伸入人体内部,以便于对患者的病灶进行手术。
实施例二
本实施例与实施例的区别在于,支撑臂230的相邻两支撑体232a、232b、232c的活动连接方式不同。
在本实施例中,支撑臂230的相邻两支撑体232a、232b、232c相互铰接,即支撑臂230中的相邻两支撑体232a、232b、232c的连接部2325相互铰接,其中,各铰接处的轴线相互平行。通过采用上述技术方案,可确保支撑臂230中的相邻两支撑体232a、232b、232c能够稳定地做相对偏转运动,从而提供上述腹腔支撑机构200的使用可靠性。
在本实施例中,各支撑臂230靠近基座210的一端可与基座210相铰接,也可与基座210固定连接,在此不作具体限定。
请结合图1所示,一种腹腔支撑设备100,包括机架300、牵引机构400和上述腹腔支撑机构200,腹腔支撑机构200的基座210安装于机架300上,腹腔支撑机构200的各牵引件231的牵引端2312均与牵引机构400的动力输出端相连接。
由于上述腹腔支撑设备100采用了上述腹腔支撑机构200的所有实施例,因而至少具有上述实施例的所有有益效果,在此不再一一赘述。
具体地,请结合图1所示,机架300上设有夹持件310,如抱箍等,夹持件310将基座210背离支撑组件220的一端夹持,以实现腹腔支撑机构200的安装,有效提高腹腔支撑机构200的拆装便捷性。
另外,为提高基座210与机架300的安装强度,基座210背离支撑组件220的一端采用加粗设计,即基座210背离支撑组件220的一端粗度大于基座210其余部分的粗度。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 腹腔支撑机构及腹腔支撑设备
- 一种用于腹腔镜手术系统控制台的主操作手支撑机构