管廊巡检机器人过门系统及方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及一种管廊巡检机器人过门系统及方法。
背景技术
城市地下管道综合管廊,是指在城市地下建造的一个隧道空间,将电力、通信、给排水、燃气和市政等各种管线集中在一起,便于有关部门实施统一规划、设计、建设和管理,具有占用城市空间小和有效改善市容的优点。对城市综合管廊进行安全巡检是保证综合管廊可靠稳定运行的重要举措。对城市综合管廊的安全巡检传统的方法是人工巡检法,即由巡检人员进入综合管廊内采用目测的方式进行巡检,并人工记录巡检成果,存在工作环境危险、巡视成果具有主观性和巡检效率低等问题。
为了有效解决人工巡检的问题,目前采用机器人代替人工进行综合管廊的安全巡检,完成日常工况巡视、状态记录和事故报警等工作。管廊巡检机器人是一种可移动的机器人系统,可在主动或遥控方式下,在管廊内进行巡检和监控,实时监测周围环境、对异常情况进行报警和记录,并协同现有的固定监控系统组成监控网络系统,提高管廊巡检效果和监控的自动化水平。
按照GB50838-2015《城市综合管廊工程技术规范》的规定,管廊内部分功能舱室必须按规定间隔设置防火分隔墙,防火分隔处的门应采用甲级防火门。在规定有防火间隔的舱室内设置管廊巡检机器人就必须考虑其穿越防火墙的问题。
目前的方案有通过给门设置传感器,让门感应机器人来给管廊巡检机器人开门,但是此种方法误动作率高,同时不便于集中管理。
发明内容
有鉴于此,有必要提供一种管廊巡检机器人过门系统及方法。
本发明提供一种管廊巡检机器人过门系统,包括:管廊巡检机器人、防火门、粘贴在机器人轨道上的RFID电子标签,所述管廊巡检机器人包括:无线网络模块、定位模块、机器人控制器,所述防火门包括:防火门本体、防火门控制模块和动作执行机构;其中:所述无线网络模块用于与防火门控制模块通信;所述定位模块采用RFID阅读器+里程计的方式实现,所述RFID阅读器安装在所述管廊巡检机器人本体,用来读取设置在轨道上的RFID电子标签,所述里程计由安装在车子导向轮上的绝对值编码器组成;所述机器人控制器为所述管廊巡检机器人的中央处理器,用于对定位模块采集到的数据进行分析、计算,并做出相应处理;所述防火门本体包括门框、主门、副门,主门与副门通过门轴与门框相连;所述防火门控制模块由无线I/O模块和电源模块组成,所述无线I/O模块与管廊内的无线AP连接,通过无线AP与防火门本体通讯,所述无线I/O模块根据通讯协议改变和读取I/O的状态,控制动作执行机构的动作,所述电源模块用于给防火门供电;所述动作执行机构包括驱动器和有刷电机,所述驱动器可以接收外部开关信号,驱动所述有刷电机运动,带动门轴完成所述防火门的开关动作。
其中,所述的无线网络模块还用于将用户命令信号传输到机器人控制器的控制接口实现对所述管廊巡检机器人的远程控制。
所述的机器人控制器具体用于:
在定位模块读取到带有防火门信息的RFID电子标签后,使管廊巡检机器人停止前进,并发出开门指令;
在收到防火门控制模块的信号后,使管廊巡检机器人继续前进,通过防火门;以及
在定位模块再次收到带有防火门信息的RFID电子标签后,向防火门发出关门指令。
该系统包括:所述防火门本体的主门与副门开启角度均为90°,在门框两侧安装有两个限位开关。
该系统包括:防火门本体完全开启后开关输出状态发生变化,输出信号接入防火门控制模块的无线I/O模块和动作执行机构。
所述的动作执行机构具体用于:
接收防火门控制模块的指令;
使驱动器根据指令先后开启防火门本体的主门、副门,主门和副门完全开启的同时触发限位开关,使有刷电机停止动作。
所述的RFID电子标签在机器人轨道上每隔一定距离设置。
所述的RFID电子标签3每隔10m放置2个。
该系统还包括:巡检地图采用拓扑地图方式,拓扑节点由目标节点和关键节点组成。
本发明还提供一种管廊巡检机器人过门方法,该方法包括:所述管廊巡检机器人的定位模块读取到带有防火门信息的RFID电子标签后停止前进;机器人控制器发出开门指令,通过无线网络模块发送给防火门控制模块的无线I/O模块,无线I/O模块输出开门信号给动作执行机构;所述动作执行机构的驱动器根据指令先后开启防火门本体的主门、副门,主门和副门完全开启的同时触发限位开关,开关状态返回给动作执行机构;所述动作执行机构的有刷电机停止动作,同时通过防火门控制模块的无线I/O模块发送给机器人控制器;机器人控制器收到信号后,管廊巡检机器人继续前进,通过防火门;定位模块再次收到带有防火门信息的RFID电子标签后,机器人控制器命令防火门关闭;管廊巡检机器人继续巡检作业,本次过门过程完毕。
本申请提出一种管廊巡检机器人过门系统及方法,能够使管廊巡检机器人和防火门进行双向通讯,确保防火门开门过程的闭环控制,作为优选方案防火门可接入管廊运维系统,通过运维系统来集中控制防火门的开闭,读取防火门的状态,大大提升了管廊巡检机器人过门系统及方法的可维护性和可操作性。
附图说明
图1为本发明实施例提供的管廊巡检机器人过门系统的硬件架构图;
图2为本发明实施例提供的防火门2的示意图;
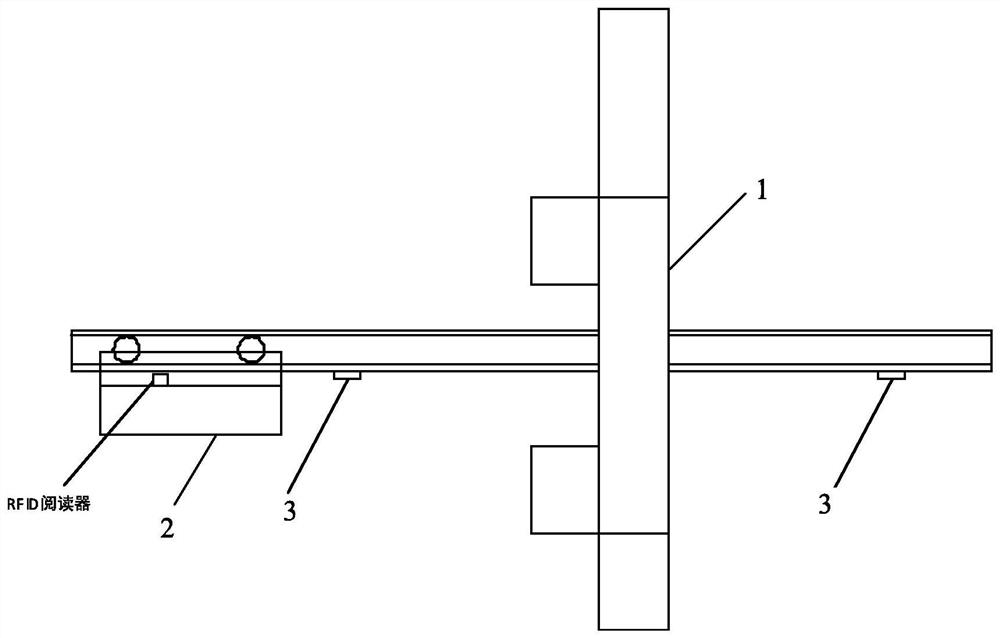
图3为本发明实施例提供的管廊巡检机器人1通过防火门2的示意图。
具体实施方式
下面结合附图及具体实施例对本发明作进一步详细的说明。
实施例1
参阅图1所示,是本发明实施例1提供的管廊巡检机器人过门系统10的硬件架构图。该系统(请一并参阅图3)包括:管廊巡检机器人1、防火门2、粘贴在机器人轨道上的RFID电子标签3。其中:
所述管廊巡检机器人1包括:无线网络模块11、定位模块12、机器人控制器13;
所述防火门2(请参阅图2)包括:防火门本体21、防火门控制模块22和动作执行机构23;
RFID电子标签3在总长度可达数公里的机器人轨道上每隔一定距离设置,在本实施例中,RFID电子标签3每隔10m放置2个,以防止漏读。
进一步地:
所述无线网络模块11用于将用户命令信号传输到机器人控制器13的控制接口实现对所述管廊巡检机器人1的远程控制,用户可以通过所述无线网络模块11与管廊巡检机器人1进行信息交互,所述管廊巡检机器人1还用于通过所述无线网络模块11与防火门控制模块22通信。
所述定位模块12采用RFID阅读器+里程计的方式实现:所述RFID阅读器用来读取设置在轨道上的RFID电子标签3,所述里程计由安装在车子导向轮上的绝对值编码器组成,通过编码器记录的车轮转动的圈数结合车轮的外径,可以推算出所述管廊巡检机器人1走过的路程。所述RFID阅读器安装在所述管廊巡检机器人1本体,经所述RFID阅读器读取RFID电子标签3的数据矫正位置后,从动轮码盘用于记录电子标签区间段的里程数。
本实施例巡检的地图采用拓扑地图方式,拓扑节点由目标节点和关键节点组成,路径规划采用人工设定的方式,人为规划设置巡检路径,管廊巡检机器人1按照事先设计好的行走路线,然后按照此路线完成全局地图节点采集。
所述机器人控制器13为所述管廊巡检机器人1的中央处理器,负责对定位模块12的传感器采集到的数据进行分析、计算,并做出相应处理。具体而言:
所述机器人控制器13在定位模块12读取到带有防火门2信息的RFID电子标签3后,使管廊巡检机器人1停止前进,并发出开门指令;
所述机器人控制器13收到防火门控制模块22的信号后,使管廊巡检机器人1继续前进,通过防火门2;以及
所述机器人控制器13在定位模块12再次收到带有防火门2信息的RFID电子标签3后,向防火门2发出关门指令。
所述防火门本体21包括门框、主门、副门,主门与副门通过门轴与门框相连,主门与副门开启角度均为90°,开启后可容一台管廊巡检机器人1通过,在门框两侧安装有两个限位开关,当门完全开启后开关输出状态发生变化,输出信号接入防火门控制模块22的无线I/O模块和动作执行机构23。
所述防火门控制模块22由无线I/O模块和电源模块组成。其中,所述无线I/O模块与管廊内的无线AP连接,通过无线AP与防火门本体21通讯,所述无线I/O模块带有数字I/O接口,根据通讯协议改变和读取I/O的状态,控制动作执行机构23的动作。所述电源模块用于将市电220VAC转为24VDC,给防火门2供电。
所述动作执行机构23包括驱动器和有刷电机,所述驱动器可以接收外部开关信号,驱动所述有刷电机运动,带动门轴完成所述防火门2的开关动作。具体而言:
所述动作执行机构23用于接收防火门控制模块22的指令;所述动作执行机构23也用于使驱动器根据指令先后开启防火门本体21的主门、副门,主门和副门完全开启的同时触发限位开关;所述动作执行机构23还用于使有刷电机停止动作。
实施例2
本发明实施例2提供一种管廊巡检机器人过门方法,所述管廊巡检机器人过门方法包括:
所述管廊巡检机器人1的定位模块12读取到带有防火门2信息的RFID电子标签3后,停止前进;
由机器人控制器13发出开门指令,通过无线网络模块11发送给防火门控制模块22的无线I/O模块,无线I/O模块输出开门信号给动作执行机构23;
所述动作执行机构23的驱动器根据指令先后开启防火门本体21的主门、副门,主门和副门完全开启的同时触发限位开关,开关状态返回给动作执行机构23;
所述动作执行机构23的有刷电机停止动作,同时通过防火门控制模块22的无线I/O模块发送给机器人控制器13;
机器人控制器13收到信号后,管廊巡检机器人1继续前进,通过防火门2;
定位模块12再次收到带有防火门2信息的RFID电子标签3后,机器人控制器13命令防火门2关闭;
管廊巡检机器人1继续巡检作业,本次过门过程完毕。
反向通过防火门2时,过程同上。
虽然本发明参照当前的较佳实施方式进行了描述,但本领域的技术人员应能理解,上述较佳实施方式仅用来说明本发明,并非用来限定本发明的保护范围,任何在本发明的精神和原则范围之内,所做的任何修饰、等效替换、改进等,均应包含在本发明的权利保护范围之内。
- 管廊巡检机器人过门系统及方法
- 综合管廊巡检机器人及综合管廊巡检系统