一种采用电子控制的机械爪机构
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及一种采用电子控制的机械爪机构。
背景技术
随着网络技巧的发展,机械爪的联网操作问题也是以后发展的方向。工业机器人是近几十年发展起来的一种高科技自动化生产设备。工业机械爪的是工业机器人的一个重要分支。它的特点是可通过编程来完成各种预期的作业任务,在构造和性能上兼有人和机器各自的优点,尤其体现了人的智能和适应性。机械爪作业的准确性和各种环境中完成作业的能力,在国民经济各领域有着广阔的发展前景。机械爪是在机械化,自动化生产过程中发展起来的一种新型装置。在现代生产过程中,机械爪被广泛的运用于自动生产线中,机械人的研制和生产已成为高技术领域内,迅速发展起来的一门新兴的技术,它更加促进了机械爪的发展,使得机械爪能更好地实现与机械化和自动化的有机结合。机械爪虽然还不如人手那样灵活,但它具有能不断重复工作和劳动,不知疲劳,不怕危险,抓举重物的力量比人手力大的特点,因此,机械爪已受到许多部门的重视,并越来越广泛地得到了应用。我国塑料机械已成为机械制造业发展最快的行业之一,年需求量在不断的加大。我国塑料机械产业的高速发展主要有以下两个大因素:一是对高技术含量装备的需求所带来的设备更新及陈旧设备的淘汰;二是海内塑料加工产业的高速发展,对塑料机械的需求旺盛。机械爪主要由执行机构、驱动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。运动机构,使手部完成各种转动(摆动)、移动或复合运动来实现规定的动作,改变被抓持物件的位置和姿势。运动机构的升降、伸缩、旋转等独立运动方式,称为机械爪的自由度。为了抓取空间中任意位置和方位的物体,需有6个自由度。自由度是机械爪设计的关键参数。自由度越多,机械爪的灵活性越大,通用性越广,其结构也越复杂。一般专用机械爪有2~3个自由度。控制系统是通过对机械爪每个自由度的电机的控制,来完成特定动作。同时接收传感器反馈的信息,形成稳定的闭环控制。控制系统的核心通常是由单片机或dsp等微控制芯片构成,通过对其编程实现所要功能。
发明内容
本发明的目的是提供一种采用电子控制的机械爪机构。
本发明解决其上述的技术问题所采用以下的技术方案:一种采用电子控制的机械爪机构,其主要构造有:电子夹持杆件、管状条形无刷马达、工件方形块件、爪机骨架套、第一控制机构板件、第一机械轨道槽、第二控制机构板件、第二机械轨道槽、双阻尼卡夹工件块、第一高分子合成柔性塑料块、单阻尼卡夹工件、第三机械轨道槽、第二高分子合成柔性塑料块、双体结构连接模块,所述的工件方形块件上下两端分别固定有第二控制机构板件、第一控制机构板件;在工件方形块件外侧固定有电子夹持杆件,所述的电子夹持杆件上固定有管状条形无刷马达,管状条形无刷马达的杆件端贯通工件方形块件;
所述的单阻尼卡夹工件一端开有第二机械轨道槽,并在另一端固定有第二高分子合成柔性塑料块;所述的第一控制机构板件一端开有第一机械轨道槽,第二控制机构板件一端开有第二机械轨道槽;所述管状条形无刷马达的杆件端夹持有爪机骨架套,爪机骨架套下设有的栓杆依次贯通第二机械轨道槽、第三机械轨道槽、第一机械轨道槽。
所述的双阻尼卡夹工件块、单阻尼卡夹工件合拢所形成槽口与控制主体的主爪件相匹配。
所述的双阻尼卡夹工件块是由两张相同的钳片中间夹合第一高分子合成柔性塑料块所构成;所述的双体结构连接模块一端铰接于单阻尼卡夹工件两侧面,另一端铰接于双阻尼卡夹工件块内的第一高分子合成柔性塑料块上下两面位置。
进一步地,所述的单阻尼卡夹工件是由单片塑料阻尼材料与金属件转配构成。
进一步地,所述的管状条形无刷马达内设有两套无刷电机系统,并且每套电机系统均有独立联动系统,两套电机系统之间均由独立的电子控制模块控制。
进一步地,所述的控制主体为使用本案的工业生产设备;并且在设备的布控上与主机控制系统接入。
本发明的有益效果:采用单阻尼卡夹工件一端开有第二机械轨道槽,并在另一端固定有第二高分子合成柔性塑料块;双体结构连接模块一端铰接于单阻尼卡夹工件两侧面,另一端铰接于双阻尼卡夹工件块内的第一高分子合成柔性塑料块上下两面位置,管状条形无刷马达的杆件端夹持有爪机骨架套等的技术手段,实现了双阻尼卡夹工件块、单阻尼卡夹工件合拢所形成槽口能够紧密快速的夹持。
附图说明
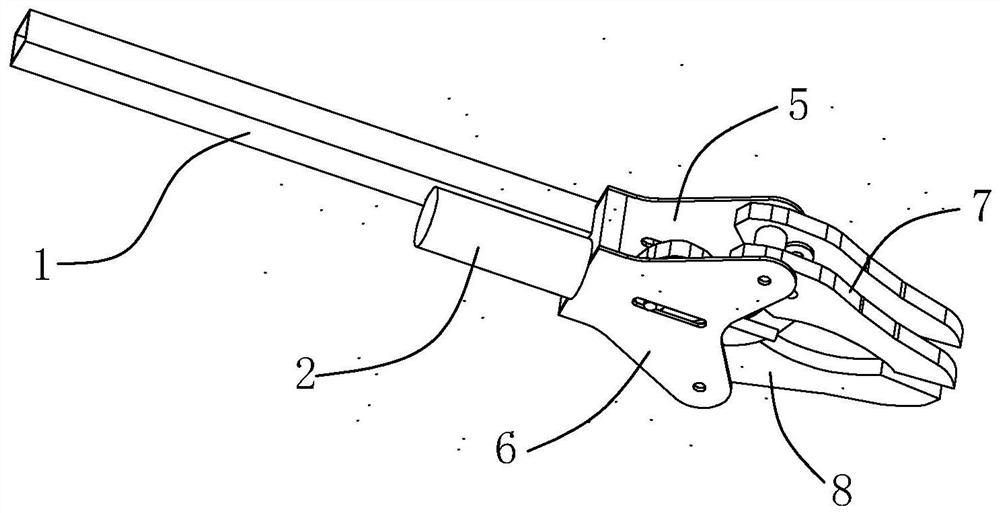
图1为本发明一种采用电子控制的机械爪机构整体结构图。
图2为本发明一种采用电子控制的机械爪机构爆炸结构图。
图3为本发明一种采用电子控制的机械爪机构核心结构图。
图中 1-电子夹持杆件,2-管状条形无刷马达,3-工件方形块件,4-爪机骨架套,5-第一控制机构板件,51-第一机械轨道槽,6-第二控制机构板件,61-第二机械轨道槽,7-双阻尼卡夹工件块,71-第一高分子合成柔性塑料块,8-单阻尼卡夹工件,81-第三机械轨道槽,82-第二高分子合成柔性塑料块,9-双体结构连接模块。
具体实施方式
下面结合附图1-3对本发明的具体实施方式做一个详细的说明。
实施例:一种采用电子控制的机械爪机构,其主要构造有:电子夹持杆件1、管状条形无刷马达2、工件方形块件3、爪机骨架套4、第一控制机构板件5、第一机械轨道槽51、第二控制机构板件6、第二机械轨道槽61、双阻尼卡夹工件块7、第一高分子合成柔性塑料块71、单阻尼卡夹工件8、第三机械轨道槽81、第二高分子合成柔性塑料块82、双体结构连接模块9,所述的工件方形块件3上下两端分别固定有第二控制机构板件6、第一控制机构板件5;在工件方形块件3外侧固定有电子夹持杆件1,所述的电子夹持杆件1上固定有管状条形无刷马达2,管状条形无刷马达2的杆件端贯通工件方形块件3;
所述的单阻尼卡夹工件8一端开有第二机械轨道槽81,并在另一端固定有第二高分子合成柔性塑料块82;所述的第一控制机构板件5一端开有第一机械轨道槽51,第二控制机构板件6一端开有第二机械轨道槽61;所述管状条形无刷马达2的杆件端夹持有爪机骨架套4,爪机骨架套4下设有的栓杆依次贯通第二机械轨道槽61、第三机械轨道槽81、第一机械轨道槽51;
所述的双阻尼卡夹工件块7、单阻尼卡夹工件8合拢所形成槽口与控制主体的主爪件相匹配。
所述的双阻尼卡夹工件块7是由两张相同的钳片中间夹合第一高分子合成柔性塑料块71所构成;所述的双体结构连接模块9一端铰接于单阻尼卡夹工件8两侧面,另一端铰接于双阻尼卡夹工件块7内的第一高分子合成柔性塑料块71上下两面位置。
本发明的工作原理:当管状条形无刷马达2舒张时,其固定于管状条形无刷马达2杆件端的爪机骨架套4下的栓杆会拨动单阻尼卡夹工件8内的第三机械轨道槽8,从而置于第三机械轨道槽8内的栓杆朝着另外一侧滑动,这个过程就迫使了单阻尼卡夹工件8向外张开,由于双阻尼卡夹工件块7、单阻尼卡夹工件8两者之间拉结有双体结构连接模块9,在单阻尼卡夹工件8的过程中会推开双阻尼卡夹工件块7张开,因此这个过程中双阻尼卡夹工件块7、单阻尼卡夹工件8张开的过程,其中设置于第一控制机构板件5的第一机械轨道槽51,以及第二控制机构板件6的第二机械轨道槽61,设置的上下两条滑槽其主要的目的是为了限制栓杆的竖直方向的定位。
反之,当管状条形无刷马达2收缩时,其固定于管状条形无刷马达2杆件端的爪机骨架套4下的栓杆会拨动单阻尼卡夹工件8内的第三机械轨道槽8,从而置于第三机械轨道槽8内的栓杆朝着反方面一侧滑动,最终双阻尼卡夹工件块7、单阻尼卡夹工件8合拢。
所述的单阻尼卡夹工件8是由单片塑料阻尼材料与金属件转配构成。
所述的管状条形无刷马达2内设有两套无刷电机系统,并且每套电机系统均有独立联动系统,两套电机系统之间均由独立的电子控制模块控制。
所述的控制主体为使用本案的工业生产设备;并且在设备的布控上与主机控制系统接入。
以上显示和描述了本发明的基本原理、主要特征和本发明的优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护范围由所附的权利要求书及其等效物界定。
- 一种采用电子控制的机械爪机构
- 一种采用无缝爪片的硫化机机械手