一种四轴冲压机器人的冲压方法
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及四轴机器人技术领域,具体为一种四轴冲压机器人的冲压方法。
背景技术
四轴机器人是工业机器人的一种,主要是采用四轴设计,外形紧凑、体积小、重量轻、用于氩弧焊接,码垛,搬运,冲压等领域,能完成稳定的搬运、焊接。康道昊威的四轴冲压机器人能够在狭小的空间内灵活的进行冲压作业,安装调试简单方便。
现有的四轴冲压机器人在工作时,往往需要多个四轴机器人进行配合作业,当某一段机械手发生故障时,四轴机器人只能停止作业,大大降低了工作效率,且需要工人在旁边进行监测观察,极大程度上增加了工人的劳动强度。
发明内容
(一)解决的技术问题
针对现有技术的不足,本发明提供了一种四轴冲压机器人的冲压方法,解决了上述背景技术中提出的问题。
(二)技术方案
为实现以上目的,本发明通过以下技术方案予以实现:一种四轴冲压机器人的冲压方法,该四轴冲压机器人的冲压方法包括以下步骤:
S1、使用调试,在需要对不同物件进行夹取或进行冲压时,四轴机器人通过摄像模组对物件进行捕捉,由人工下达命令控制机器人对该物件进行抓取或捕捉,四轴机器人通过摄像模组反馈的信息调整机械手;
S2、物件夹取,当人工下达夹取命令后,四轴机器人根据摄像模组反馈的信息调整相应的机械手并对该物件进行夹取;
S3、物件冲压,当人工下达冲压命令后,四轴机器人根据摄像模组反馈的信息旋转大臂,转换冲压机械手并对准需冲压的物件,并控制夹取机械手将物件夹住升起,以便冲压机械手可以对物件进行冲压作业。
S4、信息记录,每当四轴机器人夹取搬运或冲压一个物件,四轴机器人终端会自动将该物件的信息录入,由人工事先设定好的程序将物件信息整理出来。
S5、机器故障,当四轴机器人发生故障,四轴机器人终端第一时间打开故障提示灯,提示工人检修,与此同时,调整其他的大臂之间的间距,将某一段故障机械手调出,保证生产继续。
S6、意外状况处理,当四轴机器人正常工作时,摄像模组步骤下一个将要搬运或夹取的物件与上一个物件不同需要更换调整机械手才可继续工作时,摄像模组将捕捉的信息反馈至四轴机器人终端,四轴机器人终端打开提示灯,并控制四轴机器人停止工作。
S7、工作结束,当搬运或冲压结束后,四轴机器人通过控制液压装置将所有机械手收回并折叠。
优选的,所述摄像模组包括高清捕捉摄像头和红外摄像头,高清捕捉摄像头负责捕捉并识别需夹取或冲压的物件,红外摄像头负责记录每次机械手运动,并对其进行甄别,避免机械手故障时,机器人未发现。
优选的,所述当四轴机器人故障时,四轴机器人可以通过红外摄像头捕捉到某一段机械手运动失常,并及时反馈至终端,由四轴机器人终端去调整机械手,同时打开故障提示灯。
优选的,所述四轴机器人上设置有故障提示灯和提示灯,其中故障提示灯为红色警报灯,提示灯为间歇性闪烁的黄色提示灯。
优选的,所述四轴机器人可以通过终端分段控制每段机械手,每一个机械手具备单独控制的功能,四轴机器人可以控制机械手进行平移反转操作。
优选的,所述四轴机器人上设置有显示屏工人可以通过显示屏查看四轴机器人终端记录的信息以及控制机器人。
优选的,所述四轴机器人内部设置有磁盘阵列,对终端记录的信息进行储存。
优选的,每一个所述机械手上均单独设置有液压装置,四轴机器人可以通过控制不同的液压装置控制不同的机械手。
优选的,所述机械手上设置有不同的夹具以及不同的冲压工具,可以对不同的物件进行夹取搬运或冲压处理。
(三)有益效果
本发明提供了一种四轴冲压机器人的冲压方法。具备以下有益效果:
(1)、该四轴冲压机器人的冲压方法,当某一段机械手发生故障时,四轴机器人终端第一时间打开故障提示灯,提示工人检修,与此同时,调整其他的大臂之间的间距,将某一段故障机械手调出,保证生产继续。
(2)、该四轴冲压机器人的冲压方法,通过设置的红外摄像头,可以记录每次机械手运动,并对其进行甄别,起到当某一段机械手发生故障时,可以第一时间发现并及时对其进行调整,大大提高了工作效率。
附图说明
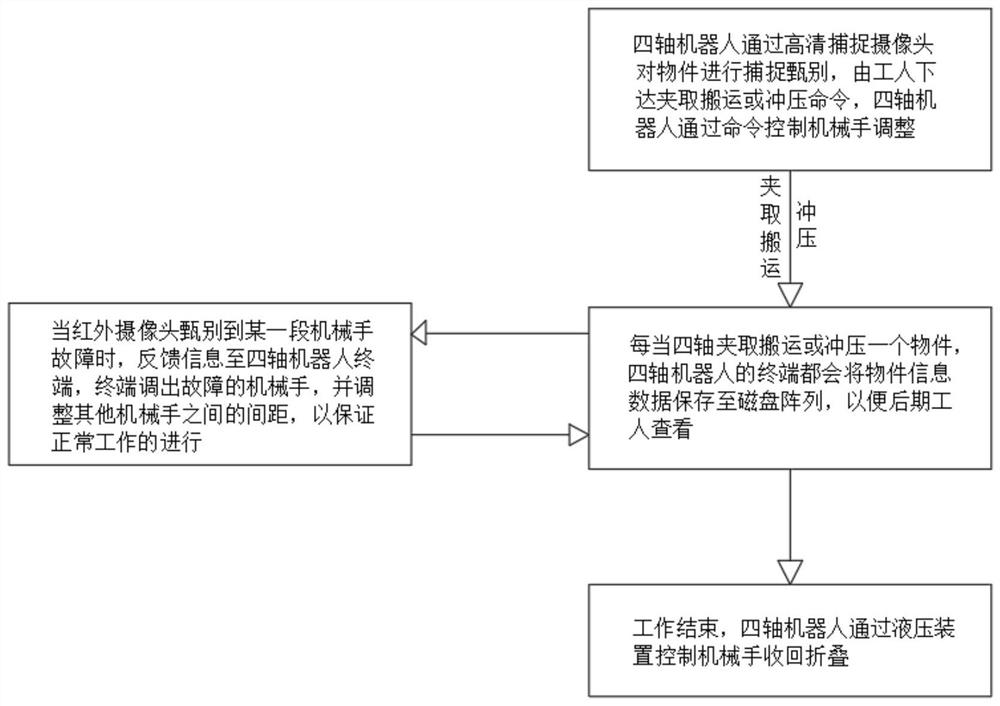
图1为本发明的一种流程结构示意图。
具体实施方式
下面将对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
请参阅图1,本发明提供一种技术方案:一种四轴冲压机器人的冲压方法,该四轴冲压机器人的冲压方法包括以下步骤:
S1、使用调试,在需要对不同物件进行夹取或进行冲压时,四轴机器人通过摄像模组对物件进行捕捉,由人工下达命令控制机器人对该物件进行抓取或捕捉,四轴机器人通过摄像模组反馈的信息调整机械手。
S2、物件夹取,当人工下达夹取命令后,四轴机器人根据摄像模组反馈的信息调整相应的机械手并对该物件进行夹取,机械手由夹取机械手和冲压机械手组成,夹取机械手上设置有三组不同的夹具,冲压机械手上设置有四组不同规格的冲压模具。
S3、物件冲压,当人工下达冲压命令后,四轴机器人根据摄像模组反馈的信息旋转大臂,转换冲压机械手并对准需冲压的物件,并控制夹取机械手将物件夹住升起,以便冲压机械手可以对物件进行冲压作业。
S4、信息记录,每当四轴机器人夹取搬运或冲压一个物件,四轴机器人终端会自动将该物件的信息录入,由人工事先设定好的程序将物件信息整理出来,方便后期工人检查与查看,方便使用者对物件信息进行调取。
S5、机器故障,当四轴机器人发生故障,四轴机器人终端第一时间打开故障提示灯,提示工人检修,与此同时,调整其他的大臂之间的间距,将某一段故障机械手调出,保证生产继续,不会因某一段机械手故障而使装置整体停止,影响工作效率。
S6、意外状况处理,当四轴机器人正常工作时,摄像模组步骤下一个将要搬运或夹取的物件与上一个物件不同需要更换调整机械手才可继续工作时,摄像模组将捕捉的信息反馈至四轴机器人终端,四轴机器人终端打开提示灯,并控制四轴机器人停止工作。
S7、工作结束,当搬运或冲压结束后,四轴机器人通过控制液压装置将所有机械手收回并折叠。
进一步的,在本实施例中,摄像模组包括高清捕捉摄像头和红外摄像头,高清捕捉摄像头负责捕捉并识别需夹取或冲压的物件,红外摄像头负责记录每次机械手运动,并对其进行甄别,避免机械手故障时,机器人未发现。
进一步的,在本实施例中,当四轴机器人故障时,四轴机器人可以通过红外摄像头捕捉到某一段机械手运动失常,并及时反馈至终端,由四轴机器人终端去调整机械手,同时打开故障提示灯。
进一步的,在本实施例中,四轴机器人上设置有故障提示灯和提示灯,其中故障提示灯为红色警报灯,提示灯为间歇性闪烁的黄色提示灯。
进一步的,在本实施例中,四轴机器人可以通过终端分段控制每段机械手,每一个机械手具备单独控制的功能,四轴机器人可以控制机械手进行平移反转操作。
进一步的,在本实施例中,四轴机器人上设置有显示屏工人可以通过显示屏查看四轴机器人终端记录的信息以及控制机器人。
进一步的,在本实施例中,四轴机器人内部设置有磁盘阵列,方便对终端记录的信息进行储存,避免了在某一个磁盘故障时,信息储存模块仍然可以读出数据,具有避免数据丢失的功能,并且磁盘阵列可以最大程度保存信息,不会发生短时间记录就会发生储存空间不够的问题,当磁盘阵列数组中任意一个硬盘发生故障时,仍可读出数据。在数据重构时,可将数据经计算后重新置入新硬盘中,保障了数据的安全。
进一步的,在本实施例中,每一个机械手上均单独设置有液压装置,四轴机器人可以通过控制不同的液压装置控制不同的机械手,四轴冲压机器人机械手每个关节的运动均由一台伺服电机和一台高精度谐波减速机共同实现,每个直线轴均由伺服电机和精密丝杠共同实现;同时配以先进的电器控制柜和示教盒,四轴冲压机械手的前两个关节可以在水平面上左右自由旋转。第三个关节由一个称为羽毛的金属杆和夹持器组成。该金属杆可以在垂直平面内向上和向下移动或围绕其垂直轴旋转,但不能倾斜。这种设计使四轴冲压机器人具有很强的刚性,从而使它们能够胜任高速和高重复性的工作。
进一步的,在本实施例中,机械手上设置有不同的夹具以及不同的冲压工具,可以对不同的物件进行夹取搬运或冲压处理。
该四轴冲压机器人的冲压方法,当某一段机械手发生故障时,四轴机器人终端第一时间打开故障提示灯,提示工人检修,与此同时,调整其他的大臂之间的间距,将某一段故障机械手调出,保证生产继续;通过设置的红外摄像头,可以记录每次机械手运动,并对其进行甄别,起到当某一段机械手发生故障时,可以第一时间发现并及时对其进行调整,极大程度上提高了工作效率。
尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
- 一种四轴冲压机器人的冲压方法
- 一种四轴冲压工业机器人