一种细胞工厂生产用点胶机器人
文献发布时间:2023-06-19 11:40:48
技术领域
本发明涉及机器人技术领域,特别涉及一种细胞工厂生产用点胶机器人。
背景技术
机器人是一种能够半自主或全自主工作的智能机器,机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围,随着人们对机器人技术智能化本质认识的加深,机器人技术开始源源不断地向人类活动的各个领域渗透,结合这些领域的应用特点,人们发展了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人。
现有的细胞工厂在生产过程中多采用人工进行点胶,不仅工作效率较低,而且容易出现漏胶的现象,对后续工序造成较大影响。
发明内容
本发明的目的在于提出一种细胞工厂生产用点胶机器人,以解决现有的细胞工厂在生产过程中多采用人工进行点胶,不仅工作效率较低,而且容易出现漏胶的现象,对后续工序造成较大影响的现象。
本发明采用的技术方案如下:一种细胞工厂生产用点胶机器人,包括工作台与垫板,还包括
放置卡板,所述放置卡板设置在所述垫板上开设侧的槽中,对物料进行装夹;
注胶组件,所述注胶组件包括用于盛放胶体的盛胶管、用于控制所述盛胶管开启与闭合的电控堵头、设置在所述盛胶管上方的连接头;
机械手臂,所述机械手臂包括设置于所述工作台上的转动头、带动所述注胶组件运动的第一连接臂、第二连接臂、第三连接臂与第四连接臂;
注胶槽,所述注胶槽设置在所述工作台上,用于盛放胶体;
电控箱,所述电控箱用于对点胶机器人进行自动控制。
进一步的,所述放置卡板包括支撑板、对称设置在所述支撑板两侧的固定板、可在所述固定板上滑动的移动板。
进一步的,所述第一连接臂、所述第二连接臂、所述第三连接臂、所述第四连接臂之间均通过法兰连接。
进一步的,所述第一连接臂包括第一连接部与第一转动部,所述第一连接部一端与所述转动头固定连接,所述第一连接部另一端与所述第二连接臂可拆卸的连接。
进一步的,所述第三连接臂包括可绕所述第二连接臂转动的第二转动部、用于连接所述第二转动部的第二连接部、带动第四连接臂转动的第三转动部。
进一步的,所述第四连接臂包括连接所述第三转动部的第一固定部、与所述第一固定部连接的第二固定部。
进一步的,所述第二连接臂包括连接所述第一转动部的第三固定部、连接所述第二转动部的第四固定部。
进一步的,所述注胶槽中设置有胶量感应器,所述胶量感应器与所述电控箱电连接。
综上所述,由于采用了上述技术方案,本发明的有益效果是:
1、采用机器人对细胞工厂生产过程进行点胶,大幅度提高了工作效率,同时解决了人工点胶时漏胶的问题;
2、自动化程度高,节约了大量的人工成本。
附图说明
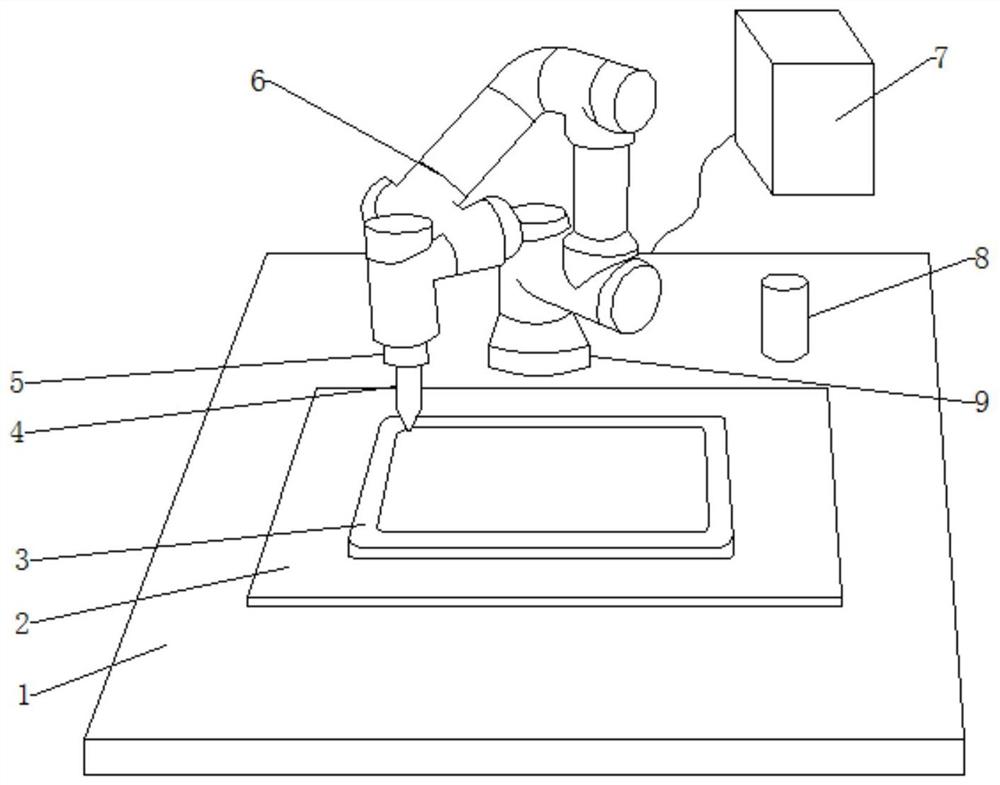
图1为本发明第一结构示意图;
图2为本发明机械手臂结构示意图;
图3为本发明放置卡板结构示意图;
图4为本发明注胶组件结构示意图;
图5为本发明第一连接臂结构示意图;
图6为本发明第二连接臂结构示意图;
图7为本发明第三连接臂结构示意图;
图8为本发明第四连接臂结构示意图;
图9为本发明注胶槽结构示意图。
图中标记:
1、工作台;101、筛网;2、垫板;201、第一电磁阀;3、放置卡板;301、固定板;302、滑槽;303、滑动头;304、移动板;305、支撑板;4、注胶组件;401、盛胶管;402、电控堵头;5、连接头;6、机械手臂;601、第一连接臂;602、第二连接臂;603、第三连接臂;604、第四连接臂;605、第一连接部;606、第一转动部;607、第三固定部;608、第四固定部;609、第二转动部;610、第二连接部;611、第三转动部;612、第一固定部;613、第二固定部;7、电控箱;8、注胶槽;801、胶量感应器;9、转动头。
具体实施方式
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。
实施例一:
参见附图1-9,一种细胞工厂生产用点胶机器人,包括工作台1与垫板2,还包括
放置卡板3,所述放置卡板3设置在所述垫板2上开设侧的槽中,对物料进行装夹;
注胶组件4,所述注胶组件4包括用于盛放胶体的盛胶管401、用于控制所述盛胶管401开启与闭合的电控堵头402、设置在所述盛胶管401上方的连接头5;
机械手臂6,所述机械手臂6包括设置于所述工作台1上的转动头9、带动所述注胶组件4运动的第一连接臂601、第二连接臂602、第三连接臂603与第四连接臂604;
注胶槽8,所述注胶槽8设置在所述工作台1上,用于盛放胶体;
电控箱7,所述电控箱7用于对点胶机器人进行自动控制。
具体的,所述垫板2固定在所述工作台1上,所述垫板2上开有凹槽,所述放置卡板3放置在所述凹槽中,所述垫板2对所述放置卡板3进行固定,所述放置卡板3对被加工物料进行装夹,防止物料在点胶的过程中移动,所述转动头9与所述工作台1转动连接,所述转动头9可在所述工作台1上转动,所述转动头9带动所述第一连接臂601、所述第二连接臂602、所述第三连接臂603、所述第四连接臂604同时转动,所述第一连接臂601、所述第二连接臂602、所述第三连接臂603、所述第四连接臂604协作带动所述注胶组件4绕被加工组件以固定的路线运行,所述连接头5一端与所述机械手臂6固定连接,所述连接头5另一端与所述盛胶管401固定连接,所述盛胶管401用以盛放胶体,所述电控堵头402设置在所述盛胶管401底部,所述电控堵头402在所述注胶组件4将要接触被加工零件时自动打开,在所述注胶组件4远离被加工零件时自动关闭,所述注胶槽8固定在所述工作台1上,所述注胶槽8中盛放胶水,便于所述注胶组件4中的所述盛胶管401对胶体进行吸取,所述电控箱7对点胶机器人进行自动控制。
优选的,所述放置卡板3包括支撑板305、对称设置在所述支撑板305两侧的固定板301、可在所述固定板301上滑动的移动板304,所述支撑板305、所述固定板301与所述移动板304均呈板状结构,所述支撑板305、两块所述固定板301与所述移动板304围成矩形的板状结构,中部位置为通孔,用以放置被加工零件,所述移动板304可在所述固定板301上滑动,通过改变所述移动板304的位置改变所述放置卡板3的形状,可以对不同类型的零件进行加工,使用方便。
优选的,所述固定板301上靠近所述移动板304一侧开有滑槽302,所述移动板304两端均设置有滑动头303,所述滑动头303插入至所述滑槽302中,通过所述滑动头303与所述滑槽302的设置,使所述移动板304可在所述固定板301中滑动,改变所述放置卡板3的结构。
优选的,所述第一连接臂601、所述第二连接臂602、所述第三连接臂603、所述第四连接臂604之间均通过法兰连接,所述法兰将所述第一连接臂601、所述第二连接臂602、所述第三连接臂603、所述第四连接臂604连接。
优选的,所述第一连接臂601包括第一连接部605与第一转动部606,所述第一连接部605一端与所述转动头9固定连接,所述第一连接部605另一端与所述第二连接臂602可拆卸的连接,所述第一连接部605与所述第一转动部606转动连接,所述第一转动部606可绕所述第一连接部605转动,所述第一转动部606与所述第一连接部605整体均呈柱形。
优选的,所述第三连接臂603包括可绕所述第二连接臂602转动的第二转动部609、用于连接所述第二转动部609的第二连接部610、带动第四连接臂604转动的第三转动部611,所述第二转动部609整体呈弧形,所述第二连接部610整体呈柱形,所述第三转动部611整体呈柱形,所述第二连接部610一端与所述第二转动部609连接,所述第二连接部610另一端与所述第三转动部611连接。
优选的,所述第四连接臂604包括连接所述第三转动部611的第一固定部612、与所述第一固定部612连接的第二固定部613。
优选的,所述第二连接臂602包括连接所述第一转动部606的第三固定部607、连接所述第二转动部609的第四固定部608,所述第三固定部607与所述第二连接部610结构相同,所述第四固定部608两端分别与所述第三固定部607、第二转动部609可拆卸的连接。
实施例二:
在实施例一的基础上,对实施例一细胞工厂生产用点胶机器人进行进一步优化:
所述注胶槽8中设置有胶量感应器801,所述胶量感应器801与所述电控箱7电连接。
具体的,所述胶量感应器801固定在所述注胶槽8的内壁底部,所述胶量感应器801与所述电控箱7电连接,所述胶量感应器801将感应的胶量数据传输至所述电控箱7。
优选的,所述电控箱7包括壳体、镶嵌在所述壳体表面的显示屏与控制按钮、对电信号进行处理的微型控制器、发出警报信号的警报器、对点胶机器人工作状态信息进行储存的储存卡,所述壳体对所述电控箱7内部元器件进行保护,所述警报器、所述储存卡均与所述微型控制器电连接。
在具体使用过程中,根据被加工零件的大小,推动所述放置卡板3的所述移动板304,使所述移动板304、所述固定板301、所述支撑板305围成的形状与被加工零件相同,将被加工零件放置入所述放置卡板3中,通过所述控制按钮输入控制指令,所述机械手臂6开始工作,所述转动头9带动所述机械手臂6转动,使所述注胶组件4正对所述注胶槽8,所述第三连接臂603带动所述第四连接臂604向下运动,使所述注胶组件4下降至所述注胶槽8中,所述电控堵头402打开,使所述注胶槽8中的胶体进入所述盛胶管401中,待所述盛胶管401中胶体达到设定值时,所述电控堵头402关闭,将所述盛胶管401端部堵塞,防止所述盛胶管401中胶体,灌胶完成后,所述第三连接臂603带动所述第四连接臂604向上移动,使所述注胶组件4从所述注胶槽8中脱离;
所述转动头9带动所述机械手臂6转动,使所述注胶组件4正对被加工零件,所述第三连接臂603带动所述第四连接臂604向下运动,在所述注胶组件4靠近被加工零件时,所述电控堵头402打开,使所述盛胶管401与被加工零件接触,所述转动头9转动,并配合所述第一连接臂601、所述第二连接臂602、所述第三连接臂603、所述第四连接臂604运动,使所述注胶组件4以固定轨道运行方式对被加工零件进行点胶,点胶完成后,所述第三连接臂603带动所述第四连接臂604向上运动,使所述盛胶管401与被加工零件分离,所述电控堵头402闭合,完成对被加工零件点胶过程。
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
- 一种细胞工厂生产用点胶机器人
- 一种细胞工厂生产用抓取机器人